水声定位关键量值计量校准装置设计
2023-06-21柳义成张安民张明敏
柳义成,张安民,叶 松,张明敏
(1.天津大学海洋科学与技术学院,天津 300072;2.交通运输部天津水运工程科学研究院,天津 300456; 3.国防科技大学气象海洋学院,湖南长沙 410000)
0 引言
水声定位技术是通过测量声波信号传播时间、速度和相位差,获得水下目标的方位角和距离[1]。水声定位系统是多源信息融合的复杂系统,初始值的微小偏差将会导致最终探测结果的巨大差异。目前国内外水声定位研究主要通过改进基阵硬件系统、优化处理算法和消减影响误差等手段提升定位精度和探测尺度[2-5],忽略了精度和尺度计量评定过程的科学性和溯源性。我国尚未制定水声定位设备的国家计量校准规范,通常根据自行设计的校准方案进行设备自校[6],校准内容不够全面,校准方法不够科学,校准过程不够规范。例如海上自校准或比测环境复杂多变且不具备复现性,浪潮流沙温盐深等外在影响因子给校准结果引入较大不确定度[7-9]。现阶段水声定位产品标称万米级工作距离、厘米级测量精度,上述关键指标通常是根据换能器设计尺寸、带宽、波长和辐射声功率等性能参数理论推导而来[10-12],尚未实现在真实水体环境下的全量程计量校准和综合量值评定。研发水声定位计量校准装置是有效促进水下探测行业高质量发展的必要措施。
针对水声定位精度、作用距离、声源级、工作频率、指向性等关键技术指标,提出基于计量器具控制的校准方法;研发基于标准基线场(长180 m,宽25 m,深10 m)的水声定位计量校准装置;提出一种基于等效声波时延反馈的模拟校准技术,研制目标模拟应答器,精准测定声波发射强度、背景噪声和目标反射强度等声学指标,依据声呐方程和声波衰减定律,通过在超出水池尺度处延时触发应答器模拟定位信号,顾及传播路径上仿真声速剖面影响,实现水声定位的全量程校准;充分分析校准过程不确定度来源、概率分布、灵敏度系数和相关性,计算不确定度,解决实际工程应用中水声定位的量值评定问题。
1 校准装置设计
水声定位校准装置分为几何参数校准装置和声学参数校准装置2部分。主要包括试验场地、配套设备、计量主标准器等,设计参数准确度应溯源至上一级国家计量标准。
1.1 几何参数校准装置
几何参数校准装置主要用于计量水声定位准确度和作用距离等性能指标,设计要求如表1所示。

表1 几何参数校准装置技术要求表
1.2 声学参数校准装置
声学参数校准装置主要用于计量水声定位换能器声源级、工作频率、指向性和量程等性能指标,设计要求如表2所示。

表2 声学参数校准装置技术要求表
2 计量方法
2.1 几何参数计量方法
2.1.1 定位示值误差
定位示值误差计量方法是安装水声定位换能器基阵、应答器至水下六自由度平台,用声速剖面仪测量水声传播信道声速,作为系统修正因子,调整换能器基阵与应答器位置,选择5、30、50、100、150 m作为检定点,用全站型激光测距仪测量应答器至换能器基阵几何中心的水平距离,用标准钢卷尺测量入水深度,换算标准斜距与角度,与水声定位系统斜距与角度测量值作差,计算定位(X,Y,Z)示值误差。计量原理如图1所示。
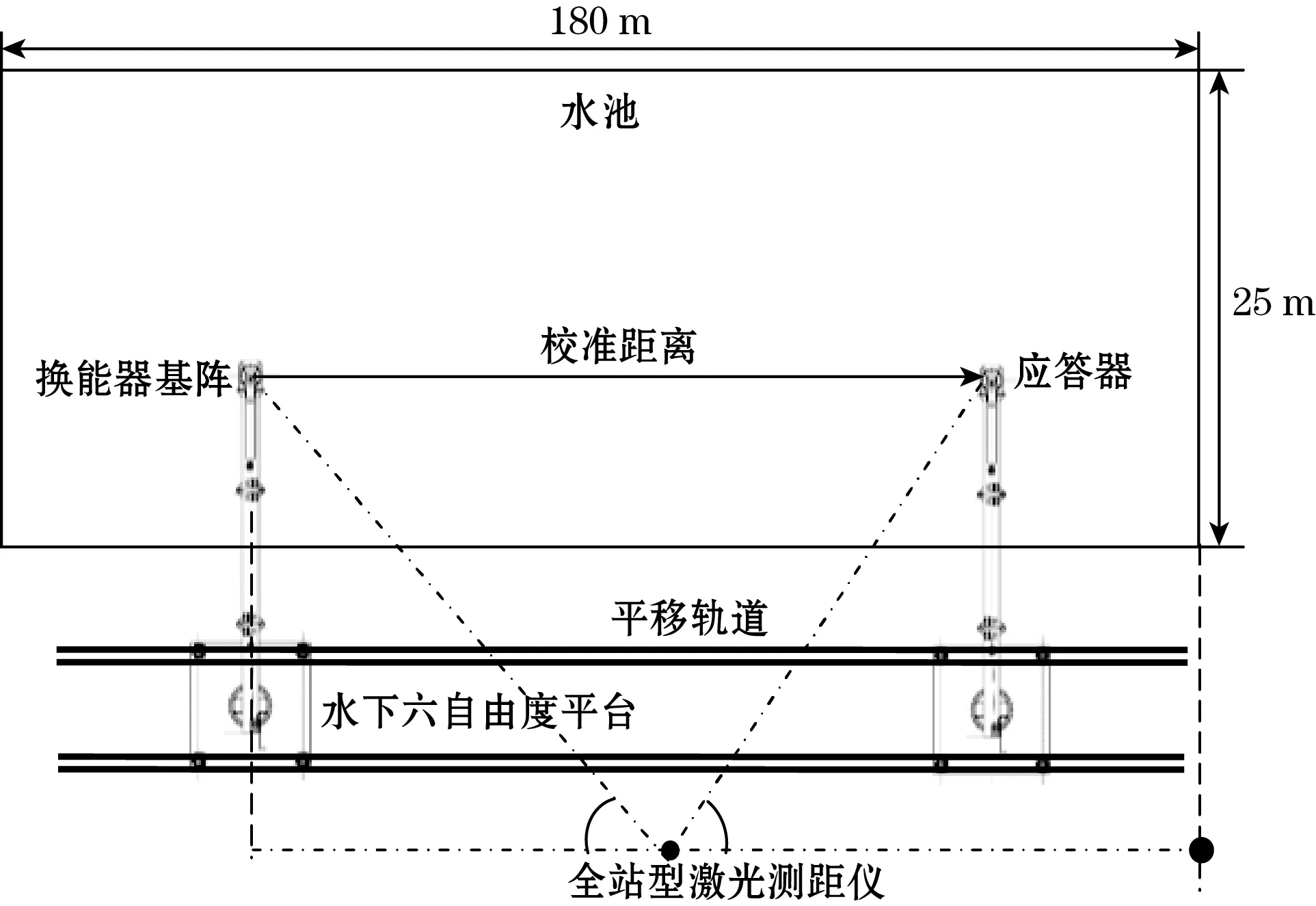
图1 定位计量原理示意图
2.1.2 作用距离
作用距离计量方法是以2台智能无人船为平台,分别搭载GNSS-RTK接收机、水声定位声基阵和应答器,用标准钢卷尺和声速剖面仪进行系统安装偏移修正和声速修正,控制1号无人船悬停于开阔水域保持位置不变,启动2号无人船驶离1号无人船,直至达到标称作用距离,判别水声定位系统是否可按标称更新率正常接收信号,规划无人船航迹线,以GNSS-RTK接收机的定位数据为参考标准值,计量被检水声定位设备的实际作用距离。
2.2 声学参数计量溯源方法
2.2.1 水声换能器声源级、工作频率与指向性
将水声定位换能器基阵安装至消声水池试验行车的回转支架底端,将标准水听器安装至升降支架底端,测试距离满足远场条件,以1 mm的步进间隔升降调节标准水听器,采集换能器基阵覆盖角度范围内的直达脉冲信号,并进行傅里叶变换获得信号频率和开路电压,按式(1)计算各个角度检测点的发送电压响应级。
SV=20lg(UOC/UX)+20lgd-M
(1)
式中:SV为发送电压响应级(基准值:1 μPa·m/V),dB;UOC为标准水听器开路电压,V;UX为施加在被检换能器基阵两端电压,V;d为标准水听器与被检换能器基阵的距离,m;M为标准水听器的灵敏度级(基准值:1 V/μPa),dB。
绘制指向性图,通过主轴最大响应级换算声源级。计量示意图见图2。
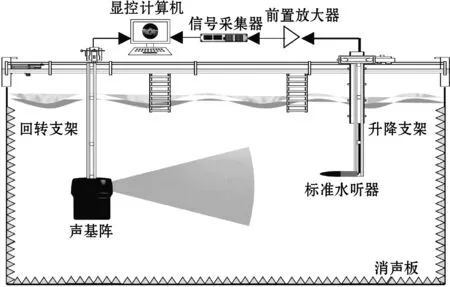
图2 声学参数计量示意图
2.2.2 全量程模拟校准
按图3设计研制目标模拟应答器,将水体声速输入水声定位系统,并发射脉冲声波,标准水听器接收声基阵脉冲信号并反馈至目标模拟应答器,应答器依据声呐方程对脉冲声波的传播时间和衰减损失进行精确计算,根据被检水声定位系统标称测量范围上限进行延时和衰减处理,由目标模拟声源发射等效声波信号,判别是否可由水声定位系统检出,若能接收到回波信号,则被检设备能达到标称测量范围,反之,按示值分辨力调减标称测量范围上限,直至系统能正常接收到回波信号,此时最大等效距离作为被检设备测量能力。全量程模拟校准原理如图4所示。

图3 目标模拟应答器设计框图

图4 全量程模拟校准原理示意图
3 试验结果
选用EasyTrak和Ranger-2型超短基线水声定位系统(简称USBL)作为试验样机,基于上述校准装置和计量方法开展试验,X、Y、Z方向定位示值误差分别如图5~图7所示,可见在150 m范围内,EasyTrak型USBL定位精度优于3%,Ranger-2型USBL定位精度优于1%。

图5 试验样机X向定位示值误差比对图
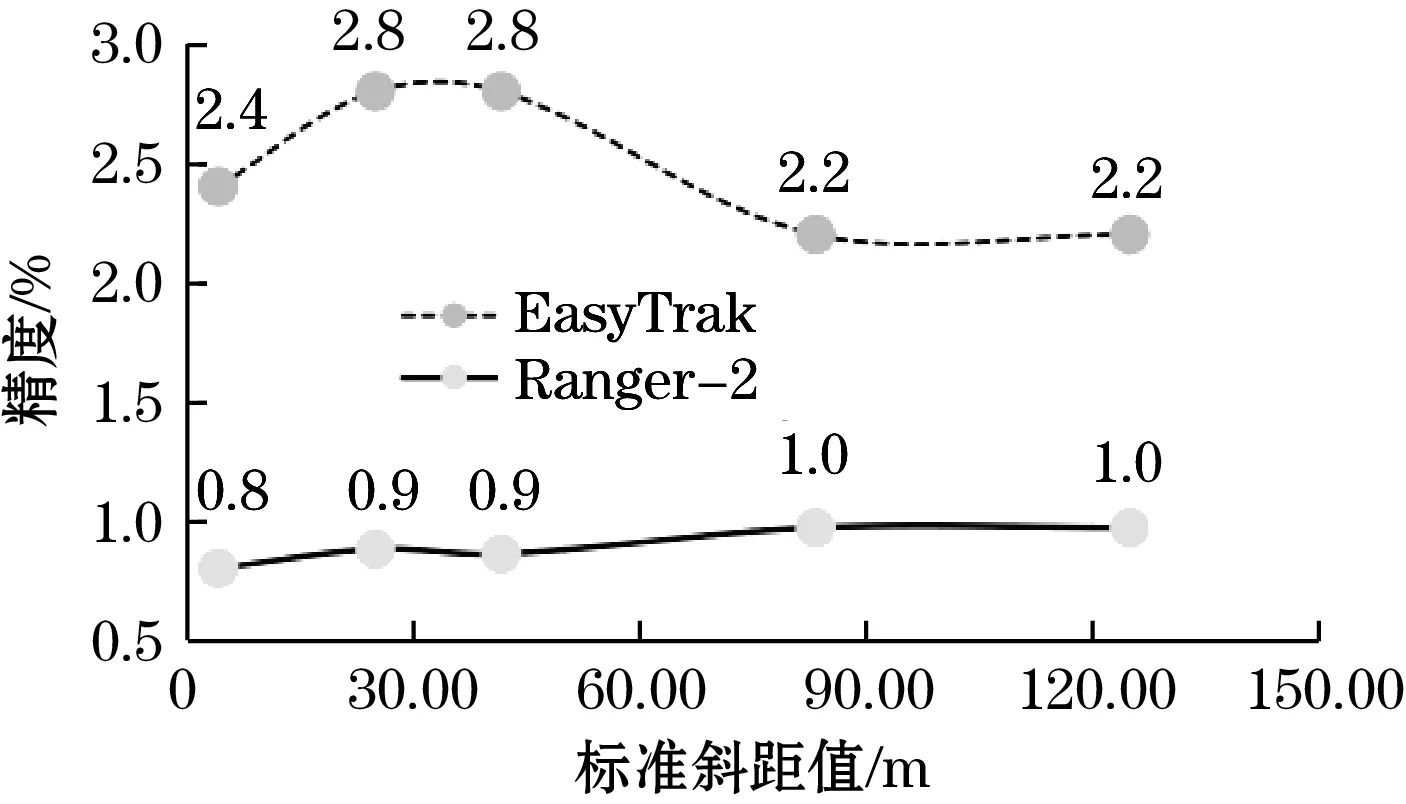
图6 试验样机Y向定位示值误差比对图

图7 试验样机Z向定位示值误差比对图
选取天津港某海域[(117.769°E,38.959°N),(117.872°E,38.933°N)],开展水声定位作用距离试验,EasyTrak型USBL作用距离可达540 m,Ranger-2型USBL作用距离可达6 630 m。
以Ranger-2型USBL为试验样机开展水声计量测试,其声源级测试结果198.4 dB@200 dB,工作频率测试结果18.076 kHz@18 kHz。
4 不确定度评定
不确定度是衡量计量标准可靠性和校准结果置信度的重要指标。分析校准过程误差来源主要有2类:被检设备与计量标准器重复性;被检设备与计量标准器系统误差。以定位示值误差σ校准过程为例,假设各误差源是相互独立的,则测量模型可表示为
(2)
式中:USBL为被检设备本身测量重复性;TS为全站仪引入的误差;SVP为声速改正不完全引入的误差;Tape为标准钢卷尺测量引入的误差;Calibration为设备安装引入的误差。
依据JJF 1059.1—2019《测量不确定度评定与表示》评定水声定位计量校准装置不确定度,结果如表3所示。

表3 计量校准装置不确定度
5 结束语
水声定位技术与装备在应急救捞、海洋调查、水运工程以及水下考古等领域具有广泛的应用。目前我国能开展水声定位设备计量性能测试的实验室较少,原因在于计量测试需要大型试验水池的支撑,由于受限于室内水池尺寸,测量范围一般不会超过50 m,远不能满足水声定位的计量需求。本文提出了基于计量器具控制的水声定位关键量值的计量溯源方法,研发了基于大比尺深水港池和六面消声水池的校准装置,经不确定度评定,各项计量能力满足《海道测量规范》、《海洋调查规范》等国家标准对水声定位量值溯源与传递的要求,为下一步制定水声定位国家校准规范和计量标准,积累了一定的技术基础。
