八旋翼植保无人机下洗气流对雾滴运动与分布特性的影响
2023-06-20陆岱鹏唐玉新王士林
李 雪, 徐 陶, 王 伟,3, 陆岱鹏, 唐玉新, 王士林*,
(1.江苏省农业科学院 农业设施与装备研究所,南京 210014;2.农业农村部长江中下游设施农业工程重点实验室,南京 210014;3.江苏大学 农业工程学院,江苏 镇江 212013)
0 引言
近年来,植保无人机低空低量施药技术受到广泛关注并取得了全面发展[1-3]。截至 2020 年底,中国植保无人机保有量已达11 万台,作业面积超过0.65 亿公顷[4]。植保无人机低空施药有效地解决了中国水田、丘陵山地和高杆作物植保机械化作业的瓶颈问题,为推动植保现代化做出了新的贡献[5]。与传统地面施药机具不同,旋翼植保无人机作业时通过旋翼旋转与空气相互作用为机体提供必要的升力,同时机体下方的下洗气流可形成“风送”喷雾效果[6-7]。
为了能够准确地获取无人机旋翼下洗气流的空间分布,李继宇等[8-9]设计了无人机立体风场测量系统和旋翼下方风场测量平台,胡炼等[10]设计了一种无线传感器网络测量系统,实现了对无人机风场的多点、多方向的实时采集。此外,基于数值模拟研究无人机旋翼风场分布规律也成为一种主流方法[11]。为了明确下洗气流时空分布规律,张豪等[12]基于Porous 模型建立了六旋翼植保无人机悬停施药下洗气流时空分布的三维计算流体力学 (computational fluid dynamics,CFD) 模型。农业农村部南京农业机械化研究所结合Navier-Stokes 方程与k-ω湍流模型分别针对单旋翼和六旋翼植保无人机下洗气流进行了数值模拟[13-15]。Zhang等[16]通过对无人机旋翼风场下雾滴受力分析建立了运动方程组,并利用Matlab 软件设计了方程求解程序,实现了雾滴速度和位移等参数的迭代计算,并发现旋翼下洗风场是影响雾滴最终速度的最主要因素。以上研究虽对无人机旋翼下洗风场和雾滴的最终沉降速度进行了解析,但缺乏对雾滴沉降过程中的空中分布与运动特性的研究。
为探究无人机旋翼风场对雾滴沉积分布的影响,研究人员开展了大量的田间试验。许童羽等[17]对比研究了多旋翼植保无人机飞行参数对雾滴在水稻田沉积分布的影响,发现作业过程中的雾滴沉积分布规律不仅与无人机的作业参数有关,还与其旋翼风场存在显著的相关性。陈盛德等[18-19]采用旋翼风场测量系统分别对单旋翼和多旋翼无人机旋翼下方风场对航空喷雾雾滴沉积的影响进行了研究,揭示了旋翼下风场对空中雾滴沉积分布的影响机理,为减少喷雾飘移和提高农药利用率提供了指导依据。Wang 等[20-22]基于空间质量平衡法对植保无人机旋翼下方气流速度和雾滴空间分布进行了测试,发现旋翼气流的分布与雾滴沉积规律密切相关。王昌陵等[23]对比研究了不同飞行参数下八旋翼无人机下洗气流场对雾滴沉积分布特性的影响,结果表明,竖直向下的旋翼气流对雾滴的沉降具有直接促进作用,在飞行速度1.0 m/s到3.0 m/s 时,沉积量与下洗气流强度呈极显著正相关性。此外,Shi 等[24]分析了多旋翼无人机下洗气流对水稻植株动力学行为的影响,发现旋翼下洗气流越大,水稻植株的形变越明显,而植株的冠层形态与雾滴的沉积结果密不可分。Tang 等[25]使用高速粒子成像测速系统对不同旋翼转速下八旋翼无人机喷雾雾滴的运动和沉积行为进行了测试,结果表明下洗气流速度不仅影响雾滴的沉积区域,同时影响雾滴沉积分布均匀性。由以上研究可知,无人机的旋翼气流直接决定了农药雾滴的沉积分布特性。
大量研究表明,由植保无人机旋翼产生的风场对雾滴的运动行为和沉积分布规律具有显著的影响,研究风场对雾滴运动与分布特性的影响对提高农药雾滴在靶标上的附着量、改善雾滴分布均匀性和降低飘移风险具有重要的科学意义[6]。而在众多植保无人机机型中,多旋翼无人机由于具有质量轻、操作灵活、飞行稳定等优势,已成为中国植保无人机市场上的主流机型[26]。虽然无人机田间作业试验可较直观地反映其旋翼风场对雾滴沉积分布的影响,但由于实际飞行作业过程中田间自然环境复杂,加之受当前检测设备条件所限,田间试验难以获取旋翼风场的空间分布规律[11]。因此,本文基于八旋翼植保无人机测定其在悬停状态下的旋翼气流方向与空间分布,并分析旋翼风场对喷雾雾滴的运动与空间分布特性的影响。
1 材料与方法
1.1 八旋翼植保无人机
以大疆MG-1P 型八旋翼植保无人机为研究对象,其对称电机轴距1500 mm,单臂长度619 mm,旋翼直径543 mm,机臂展开时机身宽度为1460 mm(不含旋翼)。旋翼系统如图1 所示,系统由4 条以“X 型”布局的主臂构成,各主臂的外端伸展为“Y 型”次臂,主臂和次臂共同构成对称结构的八旋翼系统。8 个对称布局的无刷电机分别为其对应旋翼的动力来源,飞控系统控制各旋翼的转速和旋转方向,共同给机体提供向上的升力。
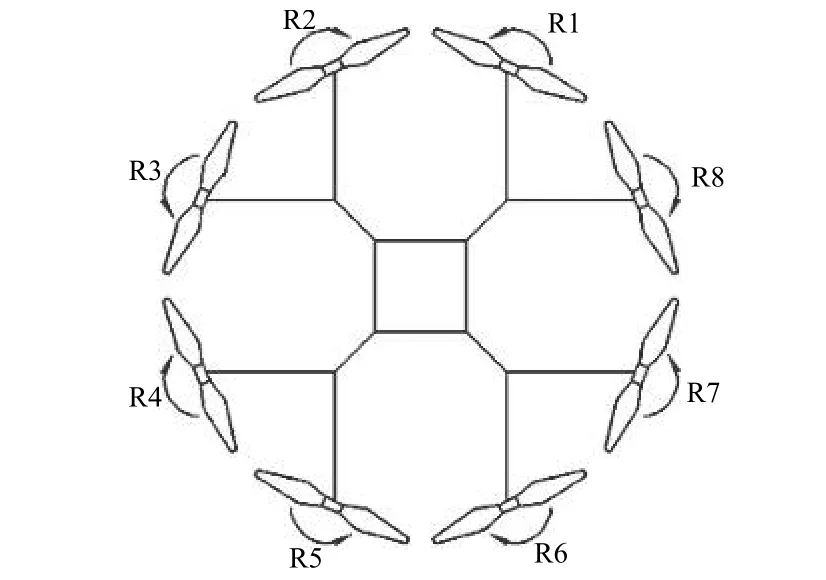
图1 八旋翼系统气动布局示意图Fig.1 Aerodynamic layout of the eight-rotor system
通过调整8 个旋翼的转速产生不同的升力,该无人机可实现对飞行姿态的调整,悬停状态下8 个旋翼的转速相同,但相邻旋翼转向相反。在该植保无人机的俯视图(图1) 中,R1 和R2 为机头,R5 和R6 为机尾,R1、R3、R5 和R7 的电机逆时针旋转,R2、R4、R6 和R8 的电机顺时针旋转。在旋翼R3、R4、R7 和R8 的正下方33 cm 处各有一个XR11001VS 扇形雾喷头 (TeeJet Technologies,美国),位于机身同侧喷头的安装距离为56 cm,机身两侧喷头的安装距离为135 cm。无人机的主要参数如表1 所示。
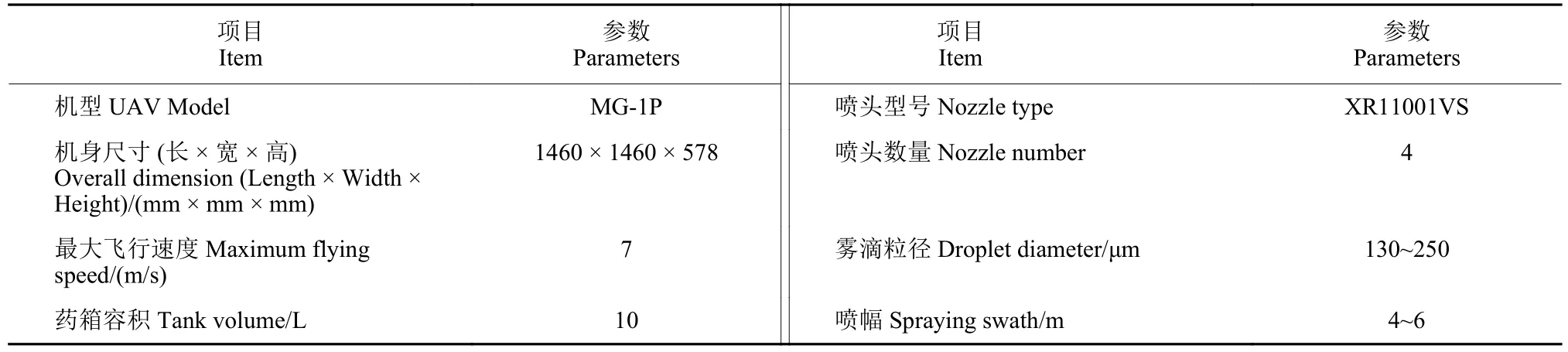
表1 供试无人机主要技术参数和喷洒参数Table 1 Basic technical parameters and spraying parameters of the tested UAV
1.2 无人机旋翼下洗气流测试
采用SP500 型三维风速风向自动记录仪 (意大利 LSI-LASTEM) 对悬停状态下八旋翼植保无人机的下洗气流场进行测定。由于无人机在田间施药过程中药箱内药液体积持续减少,旋翼风场强度也随之变化。为更准确地对旋翼风场进行测定并确保电池正常续航能力的条件下,测试期间无人机的药箱载荷保持为2 L,悬停高度设定为230 cm,在机体正下方放置边长为2 m 的正方体金属架框选旋翼下洗气流测试区域,并参照图2 所示对气流场空间测试层和测试点进行划分。
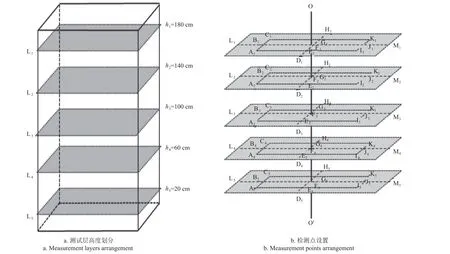
图2 下洗气流空间分布测试采样示意图Fig.2 Sampling diagram of downwash airflow spatial distribution test
为确保各测试层间旋翼风场速度和方向有较明显差异,并尽可能多地获取不同测试层的风场分布特性,因此将相邻测试截面的层间距设定为40 cm,共计5 个测试截面 (图2a)。分别对无人机机体下方不同距离的横截面进行编号,横截面由高向低依次标号为L1~L5,L1截面位于机体正下方50 cm 处 (h= 180 cm)。在每个测试截面上分别选取图2b 中所示Ai、Bi、Ci、...、Mi(i为截面编号) 共计13 个测量点,其中Fi为测试截面的中心点,测量点Li、Bi、Fi、Ji、Mi的间距为50 cm,测量点Di、Ei、Fi、Gi、Hi的间距同样为50 cm。三维风速风向记录仪的采样频率设定为1 Hz,每个测试点分别测试3 次取平均值,每次测试时间不低于30 s。
1.3 雾滴粒径与速度测试
为明确该无人机旋翼下洗气流对喷雾雾滴粒径和速度的影响,分别对旋翼静止和悬停状态下的雾滴粒径和速度进行测定。在喷雾压力为0.3 MPa时,使用PDIA 雾滴成像测速系统 (VisSize P15,Oxford Lasers) 对其喷雾雾滴的瞬时图像和运动特性进行分析,获取雾滴的粒径分布和沉降速度。旋翼静止状态下的植保无人机使用金属桁架固定在高度230 cm 处,悬停状态无人机的载液体积为2 L,悬空高度为230 cm,雾滴成像测速系统的采样点设置与图2 一致。
为确保测试结果的准确性,测试前在光源面板中缓慢调节雾滴成像测速系统的脉冲间隔,确保测试点图像中的雾滴间有一定的间距,以满足雾滴速度计算要求。设定雾滴成像测速系统的雾滴粒径测试范围为10~1000 μm,雾滴速度范围为0~15 m/s,单次测量时长为10 s,并排除球形度低于0.7 和图像边界处的雾滴。每个采样点重复测试3 次,计算并分析其平均值。
1.4 雾滴空间分布测试
为探究植保无人机旋翼下洗气流对喷雾雾滴空间分布的影响,在喷雾压力为0.3 MPa 下,分别对旋翼静止和悬停状态下的雾滴在不同测试点的含量进行测定。悬停状态下药箱载药体积和悬停高度与旋翼下洗气流测试保持一致,旋翼静止状态下无人机的固定高度和方法与雾滴粒径与速度测量部分一致,雾滴空间分布含量的采样点与图2 一致。参照图2b 中同一层的采样点,使用金属支架将直径为90 mm 的一次性培养皿分别固定在采样点位置用于接收该区域内沉降雾滴,为防止培养皿和支架对其他测试层样品的干扰,测试应分层进行。各层采样点接收沉降雾滴的时间为10 s,重复3 次并取平均值。
为对沉降雾滴进行定量,选用食用色素诱惑红85 (上海染料研究所有限公司) 作为示踪剂,将其配制成质量分数为2‰的水溶液作为喷雾液。待测试完成后向培养皿中加入定量体积的去离子水对示踪剂进行洗脱,使用722s 型紫外可见光分光光度计 (上海仪电分析仪器有限公司) 在501 nm 条件下测定洗脱液的吸光值。参照国际标准委员会ISO 24253植保机械田间喷雾沉积测试标准[27],根据公式 (1)计算采样点单位面积雾滴沉积量。
式中βdep为单位面积雾滴沉积量,mL/cm2;Vdil为加入洗脱液的体积,mL;Asmpl为洗脱液的吸光值;Ablk为空白培养皿洗脱液的吸光值;ρspray为喷雾液中示踪物质的质量浓度,g/L;Fcal为吸光值与示踪剂浓度的关系系数,μg/L;Scol为雾滴收集器面积,cm2。
同一层采样区域内雾滴沉积量的变异系数(CV) 为各采样点沉积量的标准差与其平均数的比值,用于评估采样区域内沉降雾滴的分布均匀性,数值越小说明各采样点雾滴分布越均匀[28]。其计算公式见公式 (2)。
式中:Xi为第i个取样点的测试值,X为所有取样点测试值的平均值,n为取样点总数。
2 结果与讨论
2.1 无人机旋翼下洗气流分布测试结果
以无人机机体正下方F 点为原点,机头方向(G 点和H 点) 为0°,按照顺时针方向绘制各测试层旋翼下洗气流的极坐标等高线图,将气流场的范围设定至图层边界。图3 为不同测试层旋翼下洗气流的分布结果。当测试高度 (h) 为180 cm 时,距离F 点40~60 cm 处的气流速度较强,其下洗气流核心区域的平均速度约为8 m/s,而由于机体对其正下方区域的遮挡,靠近F 点区域的气流速度较小,其在F 点的风速仅为1.12 m/s。
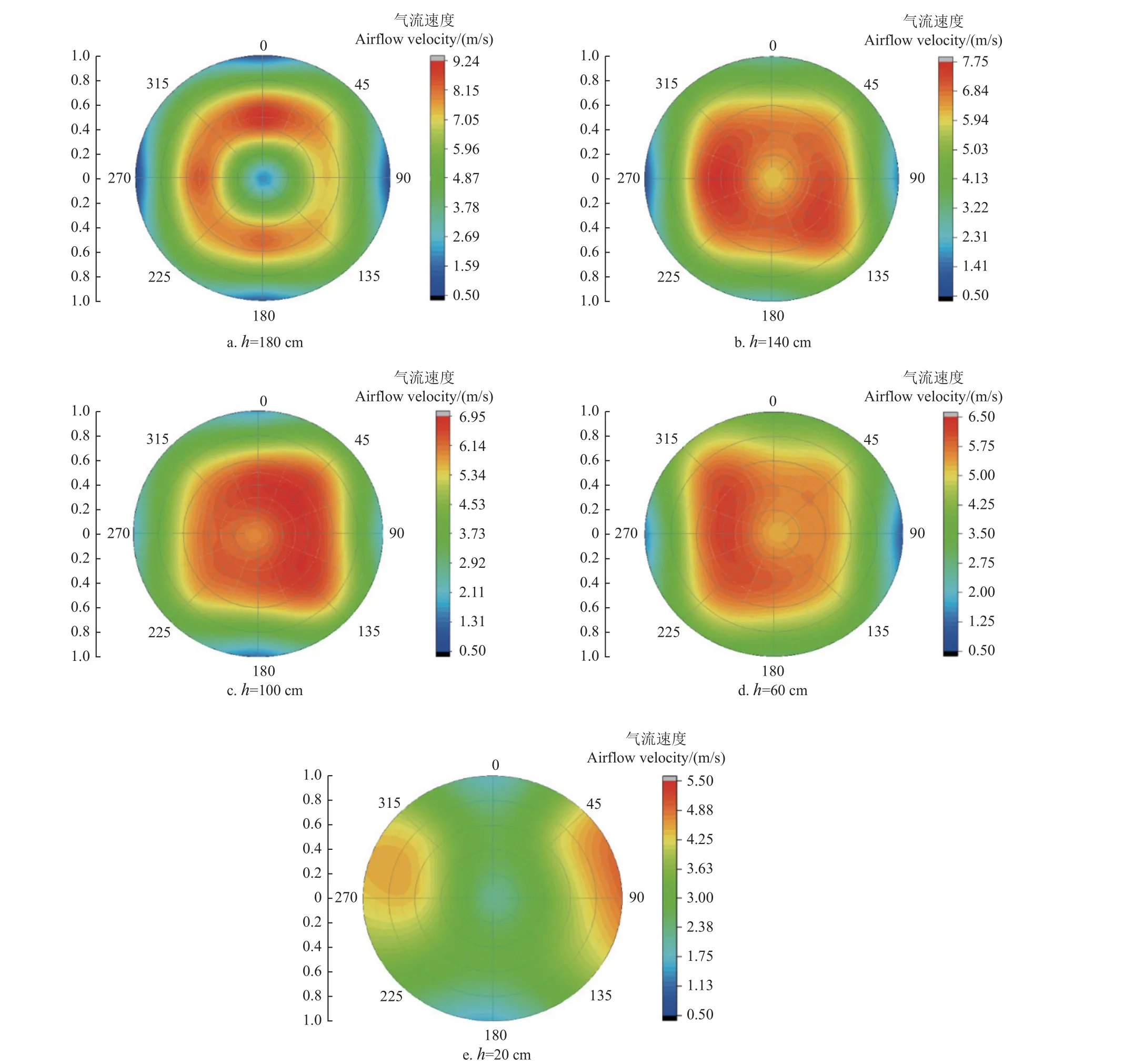
图3 不同采样层高度下无人机旋翼下洗气流分布Fig.3 Downwash airflow distribution of UAV on different measurement layers
随着测试层高度的降低,无人机旋翼下洗气流的分布范围进一步扩散,当测试层高度为60~140 cm 时,同一测试层内距离F 点10~70 cm 范围内的风速明显高于其他区域。同时,旋翼下洗气流的强度伴随测试层高度的下降略有降低,在测试层高度为140、100 和60 cm 时,各层测试点的最大风速分别为7.75、6.95 和6.50 m/s。
当测试层高度下降至20 cm 时,由于地面的阻挡效应致使无人机旋翼下洗气流核心区域再次向外围扩散。此时,该测试层内各测试点的气流速度相对平均,测试层内各测试点的平均气流速度为3.24 m/s,而机身左右两侧区域的平均气流速度约为4 m/s,略高于其他区域。
为对无人机旋翼下洗气流方向进行表征,选取由测试点L、B、F、J 和M 在竖直方向构成的截面绘制该截面下洗气流分布矢量图。结果 (图4)显示,机体正下方F 点的气流速度由高到低呈现先增加后减小的趋势,F 点在最高层和最底层的气流速度明显低于中间3 个测试层,同时中间3 层的气流速度随着测试层高度的降低呈现下降趋势。位于机身左右两侧的B 点和J 点的气流速度明显高于其他区域,且气流速度随着测试层高度的降低而降低。位于机身外围两侧的L 点和M 点的气流速度最低,但其在L5层 (h= 20 cm) 的气流速度最高。

图4 L-B-F-J-M 截面下洗气流分布矢量图Fig.4 Vector diagram of downwash airflow distribution in L-B-F-J-M section
位于无人机机身正下方区域的F 点的气流速度方向近似于竖直向下,而位于机体两侧区域的气流呈“先收缩、后扩张”的喇叭状,这一测试结果与杨风波等[15]基于三维CFD 模型的仿真结果一致。当测试高度为180 cm 时,测试点L 和M 的气流方向均指向测试区域内侧斜下方,其与竖直方向的夹角分别为43.6°和49.2°;当测试高度为20 cm 时,测试点L 和M 的气流方向均指向测试区域外侧斜下方,其与竖直方向的夹角分别为71.3°和81.5°。整体而言,无人机机身两侧旋翼下洗气流的速度和方向呈现对称分布。
2.2 雾滴粒径与速度测试结果
表2 为不同采样层高度下喷雾雾滴的速度分布结果。当无人机旋翼静止时,由于喷雾系统所安装的4 个喷头的喷雾扇面均与机头方向垂直,因此L1层中距离喷头安装距离较远的D 点和H 点未检测到喷雾雾滴。随着喷头下方距离的增大,喷头的喷雾范围进一步扩散,部分雾滴斜向运动至机头和机尾方向,因此旋翼静止时L2至L5层的D 点和H 点检测到部分雾滴。但当无人机处于悬停状态时,旋翼高速旋转产生的下洗气流将影响雾滴的运动状态和空间分布[6,12,29],Tang等[25]也研究发现,无人机旋翼风场可降低喷头的喷雾角。因此当植保无人机悬停时,喷头的喷雾区域减小,在多个测试点未能检测到喷雾雾滴,且测试层的高度越高,未检出测试点越多。

表2 不同采样层高度下喷雾雾滴速度分布Table 2 Droplet velocity distribution on different measurement layers
在无人机旋翼静止条件下喷雾雾滴的沉降速度较慢,各测试层及测试点的雾滴沉降速度均低于1 m/s。其中:L1层J 点的雾滴速度最高,为0.48 m/s;位于机身中间区域的E、F 和G 点的雾滴速度相对较低,约为0.2 m/s;截面L-B-F-JM 在 L3层上雾滴速度为0.68~0.87 m/s,各测试点的雾滴速度无显著差异,且均明显高于同层其他测试点;L4和L5层各测试点的雾滴速度分布规律与L3层相近。整体而言,旋翼静止状态下L3至L5层的雾滴速度呈现增大趋势,但L5层的各测试点的雾滴速度相对接近,此时雾滴可能达到匀速下降状态。
雾滴在风场条件下其运动特性也将发生显著变化[16,30-31]。无人机悬停状态下,其喷雾雾滴的速度均远高于相同测试点下旋翼静止时的雾滴速度。L1层的B 点和J 点的雾滴速度分别为8.6 和10.3 m/s,而位于机身正下方的F 点的雾滴速度仅为3.0 m/s,这一测试结果与图3a 中的下洗气流分布特性高度吻合。与L1层测试结果相似,L2至L5层的雾滴速度分布特性同样与其对应测试层的旋翼下洗气流分布结果一致。整体而言,由L1至L5层的雾滴速度呈现下降趋势,这一结果也与其对应气流衰减趋势相同。由于无人机机身的遮挡,F 点的雾滴速度呈先增大后降低趋势,其在L1至L5层的速度分别为3.0、6.5、8.3、7.3 和4.0 m/s;对于同一测试层而言,位于测试区域边缘的L 点和M 点的雾滴速度最低。这一雾滴速度分布结果也与图4 中该截面上的下洗气流分布特性完全一致。以上结果表明:无人机旋翼风场极大地提高了雾滴速度,且雾滴速度分布特性与旋翼风场强度高度吻合。
表3 为不同采样层高度下喷雾雾滴的粒径测试结果。当旋翼静止时,距离喷头位置较远的D 点和H 点的雾滴粒径较小,除L4层H 点的雾滴粒径为74.4 μm 以外,L2至L4层的D 点和H点的雾滴粒径均在50~60 μm 范围内。相比而言,L5层的D 点和H 点的雾滴粒径有所增加,分别为93.9 和94.0 μm,这可能是由于近地位置中间区域较大雾滴向外扩散所致。旋翼静止时:L1层至L5层F 点的雾滴粒径分别为82.3、132.0、131.2、145.1 和151.8 μm,其中L2至L5层F 点的雾滴粒径相对较大;L1层L 点和M 点的雾滴粒径分别为80.0 和66.4 μm,除L3层L 点的雾滴粒径为105.8 μm 以外,L2至L5层的L 点和M 点的雾滴粒径均高于115.2 μm。王双双等[32]对ST 型扇形喷头进行雾滴粒径测试,发现位于喷雾扇面外侧边缘位置的雾滴粒径大于扇面内部区域。而本研究中的L 点和M 点恰巧位于喷雾边缘位置,而F 点为两个扇形喷头喷雾边缘重合处。由于L1层位置较高,喷雾扇面暂未完全展开,因此,其雾滴粒径低于高度较低的测试层。

表3 不同采样层高度下雾滴体积中值中径分布Table 3 Volume median diameter of droplets on different measurement layers/μm
而由于旋翼气流的影响,无人机在悬停状态时在较多测试点并未检测到雾滴,尤其是各测试层的D 点和H 点,但在可检测到雾滴的各测试点的雾滴粒径均普遍大于旋翼静止时的雾滴粒径,多数测试点的雾滴粒径在200 μm 以上,个别粒径较小的测试点的雾滴粒径也达到150 μm 左右。雾滴的雾化是由液膜与空气间的剪切力造成的,剪切力越强雾化效果越好[33]。王士林等[34]基于电动背负式喷雾器研究,发现位于喷头正后方的电动风机产生的气流可显著增大喷头雾化的雾滴粒径。本研究中无人机旋翼气流与喷头的喷雾方向一致,因此猜测旋翼产生的高速下洗气流削弱了空气与喷头出口处液膜剪切的相对速度,致使旋翼风场条件下雾滴的粒径变大。此外,无人机悬停在空中时机体会产生一定程度的震动,该震动将极有可能影响液泵和管路对喷雾液输送的稳定性,进而影响喷头的雾化效果,最终可能会导致雾滴粒径增大。
与旋翼停止状态下雾滴粒径的分布结果相似,位于无人机机身两侧喷头喷雾边缘重叠处的F 点的雾滴粒径较大,其在各层的雾滴粒径均大于200 μm。相比于其他测试点的雾滴粒径,位于喷雾边缘的L 点和M 点的也较大,2 个测试点在L2和L3层的雾滴粒径均大于200 μm,但其在L4层的雾滴粒径分别降低至181.8 和194.3 μm,其在L5层的粒径进一步下降至151.1 和193.9 μm。结合图4 中下洗气流分布矢量图可知,气流自L4层开始向外围扩散,其在扩散过程中必将胁迫部分喷雾内部区域的小雾滴向L 点和M 点运动,致使该2 点在L4和L5层的雾滴粒径减小。
2.3 雾滴空间分布结果
表4 为各测试点喷雾液的沉积分布结果,可知无论无人机旋翼处于静止还是悬停状态时,机身左右对称位置的B 点和J 点的沉积量均最高,位于外侧的L 点和M 点的沉积量次之,相较于其他测试点位,正下方区域的F 点的沉积量也较高,D 点和H 点的沉积量最低。基于该八旋翼植保无人机喷头的安装位置,B 点和J 点分别位于机身左右两侧的2 个喷头之间且距离喷头距离最近,L、M 和F 点也位于两个喷头喷雾扇面的中间区域,但F 点距离喷头的距离稍远。
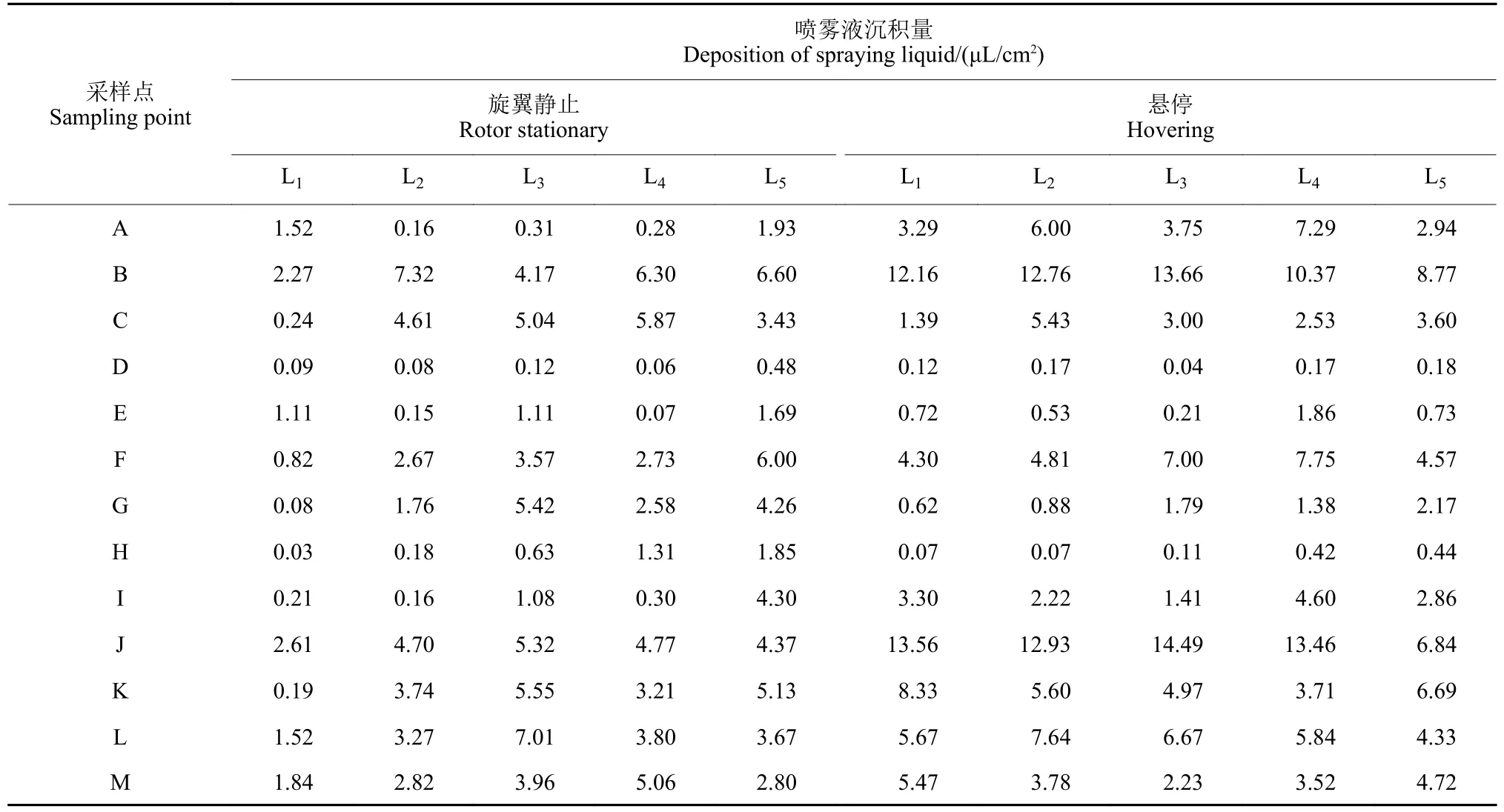
表4 不同采样层高度下各测试点的喷雾液沉积量Table 4 Deposition of spraying liquid on different measurement layers
无人机悬停状态下距离喷头距离较远的测试点 (D、H、E 和G 点) 的沉积量与旋翼静止时相应测试点的沉积量相比较为接近。由于测试点均不在喷头及其喷雾扇面的正下方区域,但无人机悬停时,雾滴在下洗气流诱导下易发生周向运动至临近区域[15],因此靠近喷头的几个测试点的沉积量均明显高于旋翼静止时对应测试点的沉积量,尤其是位于两个喷头喷雾扇面中间的B、J、L、M 和F 点。无人机悬停时B 点和J 点在L1至L4层的沉积量均高于10 μL/cm2,2 个测试点在L5层的沉积量也分别达到了8.77 和6.84 μL/cm2,而当旋翼静止时,喷雾液在L2层B 点的沉积量最高仅为7.32 μL/cm2。同理,无人机悬停时,喷雾液在F、L 和M 点的沉积量也高于旋翼静止时,但随着测量层高度的降低,两种喷雾状态下喷雾液的沉积量差异性降低。
由表4 可知,无人机喷雾雾滴主要集中于LB-F-J-M 截面附近,该截面的雾滴分布效果直接决定了植保无人机施药时的有效喷幅和均匀性。因此分别计算无人机旋翼静止和悬停喷雾时该截面上喷雾液的平均沉积量、沉积量的标准差和变异系数。结果(表5)显示,由于旋翼气流的诱导作用,导致大量雾滴沉积到该截面上。当无人机悬停时,雾滴在L1至L4层的平均沉积量均在8 μL/cm2以上;而旋翼静止时,雾滴在L3层的平均沉积量最高为4.81 μL/cm2。但旋翼静止时,雾滴在L1至L4层沉积量的标准差均低于悬停时,说明因无人机旋翼下洗气流不稳定而降低了测量的重复性。无人机悬停时,雾滴在L5层的平均沉积量为5.85 μL/cm2,略高于旋翼静止时的4.69 μL/cm2,同时悬停时雾滴在该层的标准差低于旋翼静止时的。

表5 L-B-F-J-M 截面各测试层喷雾液的平均沉积量、标准差和变异系数Table 5 Average deposition, standard deviation, and coefficient of variation of spraying liquid on each measurement layer of L-B-F-J-M section
此外,无人机旋翼产生的下洗气流也可以改善雾滴在该截面的沉积分布均匀性。当旋翼静止时,雾滴在L1层沉积量的变异系数高达89.31%,其在L2至L4层的变异系数均为60%左右;而当悬停时雾滴在L1至L4层的变异系数均为50%左右。雾滴在接近地面位置 (L5层) 的沉积分布均匀性最好。旋翼静止时,雾滴在该层沉积量的变异系数为51.81%;而悬停时,由于旋翼气流在近地附近向外围扩散形成地面铺展[12]进一步提高了雾滴分布均匀性,其变异系数降低至36.87%。
3 结论
本研究采用三维风速风向自动记录仪对悬停状态下大疆MG-1P 型八旋翼植保无人机的下洗气流场进行测定,并对比分析了旋翼气流对喷雾雾滴的速度、粒径和沉积分布均匀性的影响。结果表明,无人机旋翼下洗气流的强度随测试层高度的下降而降低并向外围扩散,当高度降至20 cm时各测试点的气流速度较为均匀,其平均速度为3.24 m/s。整体而言,无人机旋翼下洗气流的速度和方向呈对称分布,位于机体正下方的气流速度方向近似于竖直向下且呈先增加后减小的趋势,位于机体两侧区域的气流呈“先收缩、后扩张”的喇叭状。无人机旋翼风场在增大了雾滴的沉降速度和粒径的同时也提高了喷雾雾滴在近地处 (20 cm)的沉积量和分布均匀性。本研究可对多旋翼植保无人机下洗气流优化、雾流场与气流场的耦合以及提高喷雾液的利用率和分布均匀性提供参考。
