小蚕共育自动饲育机控制系统设计与试验
2023-06-17陈宇杨创唐维东张九通蒋猛
陈宇 杨创 唐维东 张九通 蒋猛

摘要:小蚕共育是现代蚕业生产中的关键环节,为提升现有小蚕共育机的工作效率与可靠性,设计一套自动控制系统。主要包括电源模块、数据采集模块和执行驱动模块的硬件电路与程序设计。电源模块以双电源自动切换方式对各硬件装置提供电源,数据采集模块采用STM32控制芯片搭载传感器的方式实现对小蚕共育环境数据和饲育设备工作数据采集,执行驱动模块实现对饲育机的举箔、推箔、抓箔、消毒和饲喂电机的控制。试验结果表明:系统能在20 ms内完成双电源切换,持续供电能力达8 h以上;数据采集的温度值误差为±1.4 ℃,湿度值误差为±2%,电压值误差为±0.5 V,电流值误差为±0.2 A;执行驱动模块实现饲喂精度达96%以上,饲喂误差为±3%。该系统可实现小蚕共育的系统控制与远程监控,具有较高的应用价值。
关键词:小蚕共育;远程监控;控制系统;自动饲育机
中图分类号:S887: TP273
文献标识码:A
文章编号:2095-5553 (2023) 03-0055-09
Abstract: Cobreeding of young silkworms is a key link in modern sericulture production. In order to improve the working efficiency and reliability of the existing rearing machine of young silkworm, an automatic control system was designed in this paper. The main content includes the hardware circuit and program design of power module, data acquisition module and executive driver module. The power module provides power for each hardware device in the dual power automatic switching mode. The data acquisition module uses the STM32 control chip with sensors to collect the data of the environment of silkworm rearing and the working data of the rearing equipment. The executive drive module realizes the control of the foil lifting, pushing, grasping, disinfection and feeding motors of the rearing machine. The test results showed that the system could complete the dual power supply switching within 20 ms, and the continuous power supply capacity was more than 8 h; The error of temperature value of data acquisition was ±1.4 ℃, the error of humidity value was ±2%, the error of voltage value was ±0.5 V, and the error of current value was ±0.2 A; the feeding accuracy of the executive drive module was more than 96%, and the feeding error was ±3%. The system can realize systematic control and remote monitoring of small silkworm rearing, and has high application value.
Keywords: cobreeding of young silkworm; remote monitoring; control system; automatic feeding machine
0引言
中国是世界上最大的家蚕养殖国,2021年蚕茧产量约为700 kt,占全球总量的90%以上[12]。随着乡村振兴战略的进一步实施,我国的养蚕规模有望再次进入快速发展阶段[3]。同时,较传统零散手工养蚕相比,当前我国的养蚕模式也发生了巨大转变,其中,小蚕共育是当前较为盛行的一种养蚕模式,它通过将一个区域内的蚕种集中在一处,由专业技术强的饲育人员统一饲育至2龄或3龄起,再分发给农户饲育,通过提升小蚕饲育质量来确保最终的蚕茧产量[4]。然而,目前大部分地区的小蚕共育方式还主要依赖于人工,且由于我国的蚕桑养殖基地大多分布在边远地区,蚕房、蚕具等养殖设施较为陈旧,缺乏现代化的饲育装备和高效精准的管理手段,对蚕桑产业转型升级造成不利影响[5]。
近年来,针对小蚕共育存在的问题,研究人员围绕机械化与自动化小蚕共育开展了大量的研究。石洪康等[6]设计了一款螺旋升降式小蚕饲育机,实现自动喂食桑叶和撒粉消毒,但需要人工介入调节设备的作业范围。颜鑫[7]设计了一种小蚕共育桑叶饲喂机,实现自动调整喂桑量與喂桑范围,但未完成与小蚕共育饲育机的联合调试。汤自强[8]设计了一种基于CAN总线的小蚕共育饲育机控制系统,实现对单台设备的自动控制,但未能对蚕房环境和设备运行状态进行监测。田涯涯[9]采用气动控制设计了一款小蚕共育自动饲喂机,减低了机器的生产成本,但气动控制的作业效率较低。上述研究均在一定程度上实现小蚕的机械化饲育,但蚕房的环境状态,设备本身的工作性能等同样会对小蚕共育的质量产生重要影响,而现有设备均不具备环境数据及设备运行状态监测。因此,以现有设备为硬件基础,研发一套具有远程环境监测和设备工作状态监测的控制系统,对于提升小蚕共育的效率,确保生产安全具有十分重要的意义。
1控制系统整体方案设计
以课题组前期研发的小蚕共育自动饲育机作为硬件基础[8],开展控制系统的设计。该饲育机采用拆跺、码垛和下传输式的工作原理对蚕箔进行传输,在机身固定位置进行桑叶喂食和撒粉消毒,实现小蚕的自动化饲育。
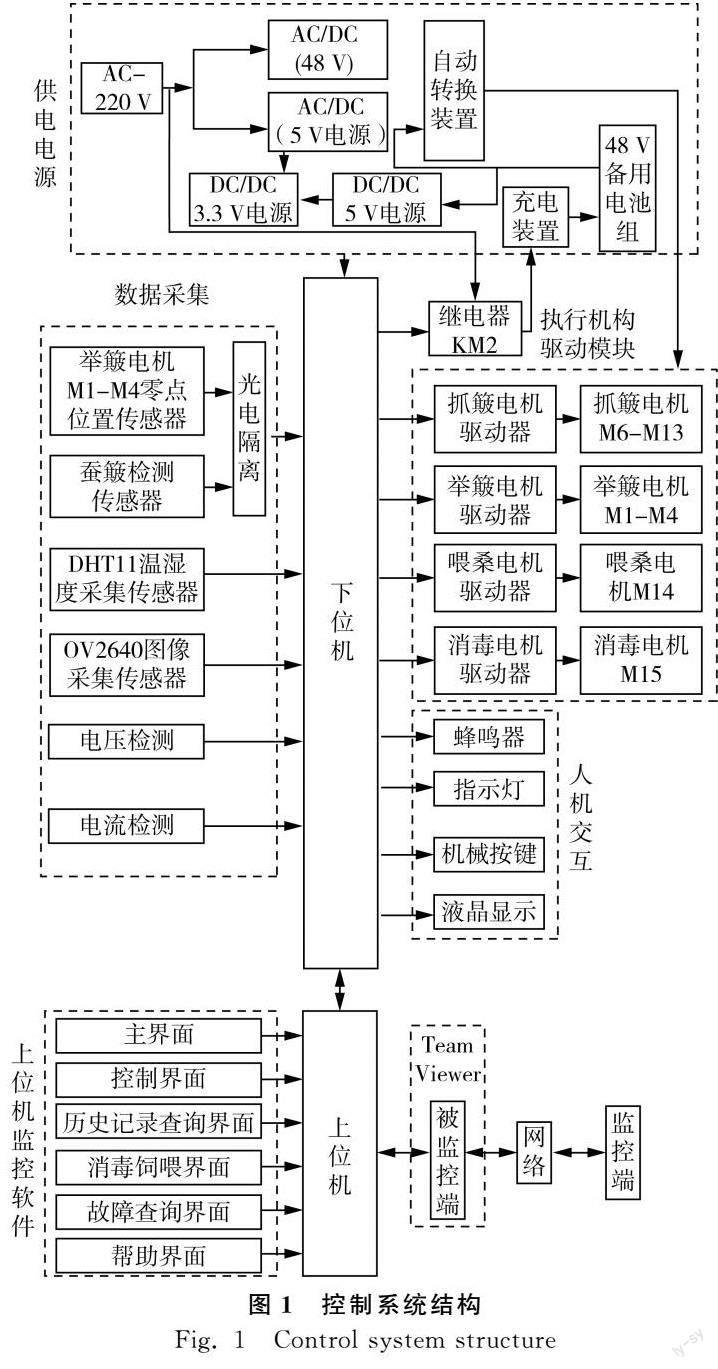
本文设计的控制系统整体結构如图1所示,它主要由电源模块、下位机(数据采集模块、执行机构驱动模块、人机交互模块)、上位机(上位机监控软件、远程监控端)组成。其中,电源模块采用双电源供电设计,主电源和备用电源通过自动转换电路实现系统的不间断供电,以在市电停电状态下保证饲育机正常运行;下位机选用ARM架构的STM32作为控制芯片,用于实现数据采集及处理、自诊断、命令决策、设备控制、与上位机进行信息交互等功能;上位机与下位机采用USB串口通信的方式实时通信,使上位机控制界面与下位机进行数据交互,实现对饲育机实时监测及控制,同时小蚕共育专家通过远程桌面控制软件Team Viewer可对共育现场进行远程技术指导和在线监测[10]。
2控制系统关键模块硬件电路设计
2.1关键硬件设备选型
控制系统硬件包括供电电源模块、数据采集模块、执行机构驱动模块、人机交互模块。本系统硬件设备的选择遵循普遍性、高性价比、可靠性、便于开发等原则,使整套控制系统的价格在共育户可承受的范围之内。参考目前市面上的硬件性能参数及实际设计需求,本系统采用的关键硬件如表1所示。
1) 48 V开关电源。本系统的负载有5个48 V/5 A 的步进电机,8个24 V/1.5 A的步进电机,2个24 V/250 W的直流电机,在系统中分3阶段工作,参数需求分别是25 A/240 W,26 A/500 W,12 A/288 W。因此本系统选用AY-1500A大功率开关型稳压电源。
2) 5 V开关电源。系统中部分传感器模块工作电压为5 V,为确保系统能够稳定工作。需要采用5 V的开关电源将交流220 V转成直流5 V,因此选用T-60B 三路输出开关电源。
3) 控制芯片。根据系统的性能指标以及功能参数,要求采用一种控制处理运算速度快、能进行图像处理、I/O接口丰富的控制单元,故选用STM32F407ZGT6作为本系统控制芯片。其性能稳定、114个通用I/O口、主频168 MHz、处理性能可达210DMIPS、8~14位并行照相机接口等优点能够满足本系统的要求[11]。
4) 零点位置传感器。小蚕共育自动饲育机在运行时需要确定举箔和抓箔电机将蚕箔抬到某个固定位置时,推箔电机才开始工作,因此必须选择一个参考点作举升机构运行的标准参考点。本系统选用LJ12A3-4-Z/BX型电感式接近开关作为举升电机和推箔电机的零点位置参考点。
5) 电流传感器。本系统需要对小蚕共育自动饲育机的运行状态进行实时监测和故障诊断,故对电源电流进行采集,选用ACS712ELCTR-30A-T芯片(该芯片检测灵敏度稳定,检测电流为±30 A)检测备用电池组两端的电流。
6) 温湿度传感器。小蚕是一种对温度和湿度要求特别高的生物,温湿度过高或者过低都会对小蚕的质量造成很大的影响,甚至导致小蚕共育失败[12]。为了提高小蚕的质量和减少蚕农不必要的损失,选用DHT11数字温湿度传感器对周围的温湿度进行实时采集。
7) 图像采集模块。在消毒饲喂控制系统中,图像的采集是第一步,采集的图像信息对小蚕共育自动饲育机进行消毒饲喂其关键作用。因此选用CMOS类型的OV2640图像采集模块,它具有体积小、工作电压低等优点,具有单片UXGA摄像头和影像处理器功能,并可以直接连接在STM32的DCMI接口上[13]。
2.2供电电源电路设计
考虑到下位机中各个模块的工作电压多样、耗电量大的情况,还要保证自动饲育机运行时市电停电的情况下也能正常工作,决定采用双电源设计,即交流(AC)220 V市电和蓄电池直流(DC)48 V供电,48 V的蓄电池供电选择4个12 V、35 Ah的胶体电池串联而成。其供电结构如图2所示。
当市电供电时,接通开关K1,市电首先经过5 V开关电源U2将交流220 V转成直流5 V,再经过SPX1117M3-3.3稳压降压芯片U4将直流5 V转成直流3.3 V,为控制单元供电。接着控制单元对控制器内部电路及外部电路进行检测,检测完毕后,控制继电器KM6导通,48 V开关电源U1接通,然后将交流220 V的市电转换为系统所需要的48 V直流电,再通过双电源自动转换电路SW供给系统执行机构。当市电停电时,备用电池组BT5首先经过SC61002稳压降压芯片U3将直流48 V转成直流5 V,再经过U4给控制单元供电,然后控制单元按着既定程序继续运行,同时双电源自动转换电路SW会接通直流48 V备用电源BT5供电电路。
2.3数据采集模块电路设计
数据模块负责对饲育机运行状态进行实时监测,并把采集到的数据信号发送至STM32控制芯片,通过分析处理后控制饲育机自动工作,数据采集模块的电路设计如图3所示。
零点位置检测选用24 V供电的NPN三线常开型LJ12A3-4-Z/BX接近开关传感器,为了防止工作过程中接近开关的信号受到干扰,选用5 V供电的TLP512-4光电隔离芯片与传感器共阳极连接,传感器信号从光耦的输入端输入,经过光耦隔离后从输出端连接到STM32的PA11引脚,当检测到蚕箔托架靠近时为低电平信号,反之为高电平信号,通过PA11反馈的电平信号类型,实现对零点位置的判断。
蚕箔的检测选用5 V供电的NPN三线常开型E18-D80NK光电开关传感器,采用与零点位置检测相同的电路设计,输出端与STM32的PB8连接,蚕箔通过时产生低电平信号传送给PB8引脚。
温湿度检测选用5 V供电的DHT11数字温湿度传感器,采用单总线通信,将传感器的3脚和4脚接地,然后将2脚连接到STM32的PB12引脚。
电流传感器选用5 V供电的ACS712ELCTR-30A-T传感器,将传感器的IP+和IP-脚串联到备用电池组供电电路中,然后将VIOUT脚连接到STM32的PF4引脚。备用电池组供电电压的检测采用分压电阻测量法,输入电压经过电阻分压后接入5 V 供电的LTC2051放大器,在经过RC无源滤波后连接在STM32中具有ADC转换功能的PF5引脚。
图像采集选用3.3 V供电的图像采集模块(OV2640摄像头、SCCB总线、电压模块、有缘晶振集成在一块芯片上)与STM32的DCMI接口直接连接。
2.4执行机构驱动模块电路设计
举箔和推箔电机驱动模块,选用86HBP113AL4步进电机和2HD8080驱动器。STM32的PC2、PC3和PB14、PB15引脚分别与两个驱动器的DIR(-)、PUL(-)接口连接,通过PC2、PC3和PB14、PB15引脚的高低电平去控制步进电机的旋转方向和速度[14]。驱动器的信号输入采用共阳极的接法,所有信号的正端接在5 V电源的正端,驱动器的供电电源外接48 V的直流电,驱动器的输出端并接两个混合式86HBP113AL4型的M1、M5步进电机,如图4(a)所示。
抓箔电机驱动模块,选用17HD4007-22B步进电机和ZD-8731-D驱动器。STM32的PC0、PC1、PF2、PF3引脚分别与驱动器的DIR(2)、PUL(2)、DIR(1)、PUL(1)接口连接,通过PC0、PC1、PF2、PF3引脚的高低电平去控制步进电机的旋转方向和速度。步进电机驱动器的公共端COM接在5 V电源的正端,供电电源为外接24 V的直流电,输出端接两个两相混合式17HD40007-22B型的M6、M7步进电机,如图4(b)所示。
消毒饲喂驱动模块,选用MY1016Z2直流电机和LB27驱动器。STM32的PC4引脚接入电阻R31(1 kΩ),然后接入一个三极管Q2(S8050)的2脚,三极管的1脚与继电器KM5连接、3脚与驱动器的GND接口连接,STM32的PC5引脚直接与驱动器的V(-)接口连接。通过PC4引脚的高低电平信号控制直流电机转动,通过PC5引脚输出不同占空比的脉冲控制电机转速,如图4(c)所示。
3控制系统软件设计
控制系统软件设计分为上位机软件编程和下位机控制程序设计。上位机主要功能为监控小蚕共育自动饲育机的实时运行状态与饲喂消息,通过Team Viewer软件实现远程监控。下位机主要功能为小蚕共育主程序、数据采集、故障诊断、人机交互。
3.1上位机软件设计
本系统上位机软件开发包含监控软件、数据库、远程监控的设计,在Windows10操作系统下完成。监控界面设计采用VB语言进行开发,VB语言具有文件访问技术、数据库访问技术、图形处理技术和通信技术等功能优点;数据库设计采用MySQL进行开发,MySQL具有运行速度快、永久开源、系统体积小等优点;远程监控采用Team Viewer远程控制软件,通过互联网对共育现场监控软件进行远程监控[15]。上位机软件总体框架如图5所示。
3.1.1监控软件的开发
监控软件根据生产需求设计了具有控制功能的开机、关机、急停、复位、速度等级调节按键;报警信息、状态信息、运行次数、环境温湿度、历史记录查询、消毒饲喂情况、故障查看、帮助界面等信息显示界面,如图6所示。利用VB中的MSComm控件工具对监控软件串口通信进行开发,实现上位机与下位机进行实时通讯,具体设计步骤如下:(1)在上位机监控界面的“工程”中添加MSComm串口通信控件;(2)添加MSComm控件ID的变量对象;(3)对串口进行初始化,设置MSComm控件的属性(参数、波特率、传输位数、停止位);(4)添加串口事件的消息处理函数,根据应用需求,编写数据处理代码;(5)编写串口发送等代码;(6)关闭串口[16]。
3.1.2数据库的设计
系统的数据库选用MySQL8.0,利用Navicat Premium 16接入MySQL8.0数据库,进行数据库开发。为了方便查阅和调用,数据库采用分表的设计方式[17],有图像采集表、运行参數表、饲喂参数表、事件记录表等。由于系统采集频率较快,为确保数据库运行稳定,需要对数据库进行优化处理以提高查询的速度,在数据表中建立合适数量的索引,尽量使用可变长度类型Varchar,把Data_ID字段设置为主键。
3.1.3远程监控的设计
在监控端和被监控端的PC机上安装Team Viewer远程控制软件,在被监控端打开Team Viewer,该软件将自动生成一个ID号和随机密码,在监控端的Team Viewer软件输入这个ID和密码,就能远程监控共育现场小蚕共育自动饲育机的运行状态,从而实现小蚕共育专家对异地的小蚕共育现场进行远程在线指导和培训。
3.2下位机控制程序设计
本系统的编译环境为Keil5,编程语言为C语言,采用嵌入式多任务实时操作系统μ C/OS-II移植到STM32控制芯片中,通过设置各个任务的优先级和并行线程去达到多任务的控制[18]。
3.2.1小蚕共育主程序
小蚕共育主程序如图7所示。
首先读取人机交互线程的输入信息,读取到开机命令后调用系统初始化程序,对系统进行初始化,并将初始化结果通过人机交互线程传至上位机,上位机控制界面显示“小蚕共育自动饲育机初始化完成请上箔”,待共育人员将蚕箔放入拆箔区后,点击运行按钮,数据采集线程里的蚕箔检测传感器程序就会检测拆箔区是否有蚕箔,当检测到拆箔区蚕箔后,小蚕共育自动饲育机就开始对堆叠好的一摞蚕箔进行拆箔、推箔、消毒饲喂、叠箔等,将这一摞堆叠好的蚕箔饲喂完后,小蚕共育自动饲育机又回到初始的状态,等待下次饲喂命令。系统在运行小蚕共育主程序的同时,控制单元通过人机交互线程来定时读取上位机发送给控制单元的信息,同时并将下位机的信息传送至上位机。通过数据采集线程,对各数据采集点进行实时采集;通过故障诊断线程,对系统的运行状态进行实时诊断[19]。
3.2.2急停复位程序
急停复位程序如图8所示,当系统检测到步进电机发生丢步现象时系统自动急停或突发情况时按动监控软件界面或者饲育现场的急停按键,待故障处理后,按下复位按钮设备从急停状态进入运行状态[20],此时程序并不会返回到主程序,而是去执行复位程序。复位程序控制算法:在主程序中先设有一个全局变量,该变量记录步进电机所行走步数,当调用复位程序时,首先通过变量值,确定步进电机当前所处位置,应该执行的动作,然后根据变量值,让复位程序以较低的速度驱动步进电机完成余下的行程和动作,当再次到达初始点时,系统进行软复位,然后以正常的状态继续运行。
3.2.3蚕座位置采集程序
图像采集程序如图9所示,首先对SCCB总线、OV2640传感器寄存器、DMA、DCMI等进行初始化配置,然后对各个寄存器进行复位,即开始图像采集,将采集到的图像传入图像缓存区SRAM,给图像操作系统的全局消息变量赋值,此时人机交互程序读取SRAM内的图像信息,并将图像信息存放至SD卡进行存储,同时将图像传至图像处理单元,进行图像处理。控制单元将图像处理结果传送至控制终端显示并存储,根据图像处理结果控制消毒饲喂机构实现定点定量消毒喂桑。
4系统测试与结果分析
测试地点为西南大学工程技术学院。选取二龄蚕若干,蚕箔若干,测试时间为2022年4月,二龄蚕共育标准按照四川省《桑蚕小蚕共育技术规程》执行。
4.1双电源自动切换测试
以举箔电机作为研究对象,利用软件程序控制举箔电机固态继电器断开,供电电源由市电切换为蓄电池,使用示波器观测举箔电机两端电压的变化。当市电供电时,举箔电机两端电压为高,断电瞬间电压变为0,当系统切换到蓄电池供电时,电压又变为高。通过测量电压为0时持续的时间为双电源切换所用的时间,共重复测试10次,示波器的测量数据如表2所示。
试验结果表明,饲育系统电力供应自动切换的时间在20 ms内,基本实现了市电与蓄电池之间的无缝切换,达到了系统设计的技术参数要求。
4.2数据采集准确性测试
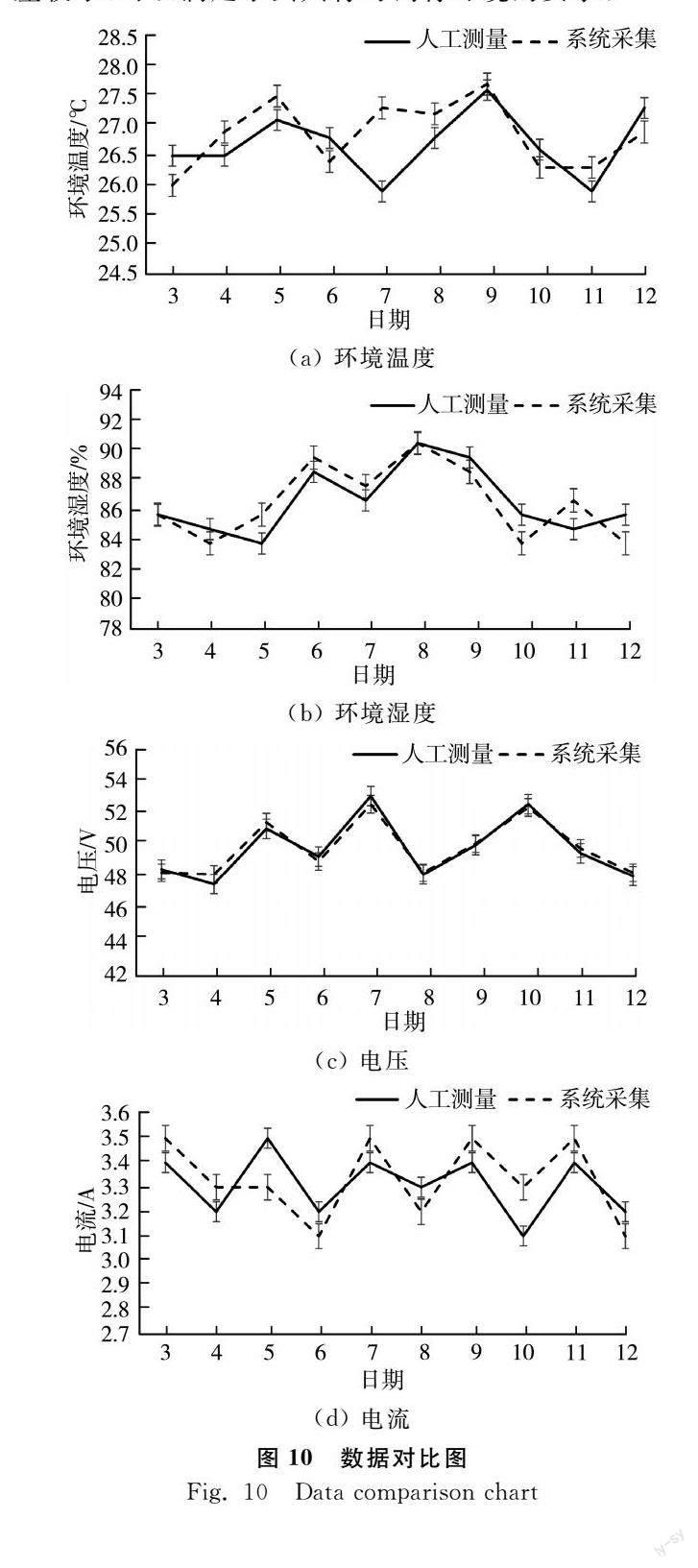
测试系统采集的温度、湿度、电流、电压数据与人工测量的数据对比。为确保测试的准确性,系统采集数据的时间节点与人工测量数据的时间节点相同,皆为每天上午10点整,连续采集10天。记录的数据如图10所示,经计算,温度值误差为±1.4 ℃,湿度值误差为±2%,电压值误差为±0.5 V,电流值误差为±0.2 A,表明系统监测的数据与人工测量的数据误差较小,可以满足小蚕共育对饲育环境的要求。
4.3远程监控操作测试
选取二龄蚕(蚕座面积为60 cm×70 cm)作为试验对象,通过Team Viewer软件远程监控操作自动饲育机进行小蚕饲喂,随机选取饲喂后的10个蚕箔样本进行测量得到实际饲喂面积,与专用计算机输出的蚕座识别面积进行比较,根据计算得到的饲喂误差和标准误差判断桑叶撒喂的均匀性和范围。饲喂过程相关数据如表3所示。
由表3可知,饲喂误差在±3%以内,此误差来自执行机构的定位精度偏差;进一步观察可知,实际饲喂区域略大于蚕座的范围,以保证所有小蚕正常进食,96%的饲喂精度达到了系统设计的允许范围,通过Team Viewer软件远程监控操作能够替代生产现场人工值机。
4.4蓄电池供电稳定性测试
以整机运行为试验对象,在实验室条件下使用辅助电源供电模拟小蚕共育的实际生产流程,人为地断开市电,饲育机每天运行3次,每次完成150个蚕箔的小蚕饲育,选用2龄蚕,正常饲喂桑叶,对饲育机进行10天的稳定性试验,单日运行时长8 h以上,其余为蓄电池自动充电,系统运行记录如图11所示。
图11中预警次数为运行过程中意外情况出现的次数,例如温湿度异常、备用电源电量不足等,误操作次数表示出现预警信息后饲育机继续运行的次数。测试表明,本文设计的小蚕共育自动饲育控制系统能够达到系统开发设计的所有参数要求。
5结论
1) 设计了一种可远程监控的自动饲育机控制系统,包括硬件电路设计和系统软件设计。设计了一种基于双电源供电的控制电路系统,并基于C语言和嵌入式多任务μ C/OS-II方法开发了下位机的自动控制程序,采用VB语言设计开发了PC端上位机监控软件,选用MySQL作为系统的数据库,并利用Team Viewer软件实现饲育机的远程监控。
2) 通过测试表明双电源在20 ms内完成自动切换;数据采集准确性测试中得到系统采集的环境温度值误差在±1.4 ℃,湿度值误差在±2%,电压值误差在±0.5 V,电流值误差在±0.2 A;远程监控操作测试中得到饲喂误差在±3%,饲喂精度达96%以上;蓄电池供电稳定性测试证明了饲育机可以在蓄电池供电的情况下正常工作超过8 h。
3) 以上试验结果表明,该控制系统能够借助温湿度、电压、电流、接近开关等传感器,实现系统在市电或蓄电池供电的情况下进行故障自诊断并自动完成饲育任务,并可通过远程软件对饲育机进行监控。与之前的小蚕共育饲育机相比,本文设计的控制系统能够更好地进行生产作业,提高小蚕饲喂效率,以及降低饲喂桑叶物料浪费,并且小蚕共育专家可以通過互联网对共育现场进行远程在线指导和培训,有助于确保小蚕安全高效共育,具有较强的应用价值。
参考文献
[1]谌苗苗, 王勇, 李树英, 等. 科技创新视角下的柞蚕产业发展与对策[J]. 蚕业科学, 2022, 48(2): 162-169.
Chen Miaomiao, Wang Yong, Li Shuying, et al. Development and countermeasures of tussah industry from the perspective of scientific and technological innovation [J]. Acta Sericologica Sinica, 2022, 48(2): 162-169.
[2]刘文全, 柳恩见, 赵颖, 等. 中国茧丝绸行业2020年运行分析及2021年展望[J]. 丝绸, 2021, 58(7): 1-8.
Liu Wenquan, Liu Enjian, Zhao Ying, et al. Analysis on operation of Chinese cocoon silk industry in 2020 and prospect in 2021 [J]. Journal of Silk, 2021, 58(7): 1-8.
[3]张晴. 中国桑蚕空间格局演变及其优化研究[D]. 北京: 中国农业科学院, 2018.
Zhang Qing. Research on the spatial distribution evolution and optimization of silkworm in China [D]. Beijing: Chinese Academy of Agricultural Sciences, 2018.
[4]王慶, 雷霆, 袁良军, 等. 现代养蚕业饲育环节的生产组织方式探讨[J]. 蚕学通讯, 2021, 41(1): 56-60.
Wang Qing, Lei Ting, Yuan Liangjun, et al. Discussion on organization of production at farm level in modern sericulture [J]. Newsletter of Sericultural Science, 2021, 41(1): 56-60.
[5]李建琴, 顾国达. 2022年我国蚕桑产业发展趋势与政策建议[J]. 中国畜牧杂志, 2022, 58(3): 270-274.
[6]石洪康, 蒋猛, 李林波, 等. 螺旋升降式小蚕饲育机的设计与应用试验[J]. 蚕业科学, 2018, 44(6): 891-897.
Shi Hongkang, Jiang Meng, Li Linbo, et al.Design of young silkworm feeding machine with spiral lifting system and its production test [J]. Acta Sericologica Sinica, 2018, 44(6): 891-897.
[7]颜鑫. 小蚕共育桑叶饲喂机设计研究[D]. 重庆: 西南大学, 2020.
Yan Xin. A study on the design of the feeding machine for the leaves of the silkworm [D]. Chongqing: Southwest University, 2020.
[8]汤自强. 基于CAN总线的小蚕共育智能饲养机控制系统设计[D]. 重庆: 西南大学, 2019.
Tang Ziqiang. Control system design of baby silkworm rearing intelligent feeding machine based on CAN bus [D]. Chongqing: Southwest University, 2019.
[9]田涯涯. 气动式小蚕共育自动饲喂机的设计研究[D]. 重庆: 西南大学, 2021.
Tian Yaya. Design and research of pneumatic automatic feeding machine for cobreeding of small silkworms [D]. Chongqing: Southwest University, 2021.
[10]翟瑞, 周静雷. 基于STM32的USB转串口通信端口设计[J]. 国外电子测量技术, 2021, 40(1): 92-95.
Zhai Rui, Zhou Jinglei. Design of USB serial communication port based on STM32 [J]. Foreign Electronic Measurement Technology, 2021, 40(1): 92-95.
[11]程力, 郭晓金, 谭洋. 智能农业大棚环境远程监控系统的设计与实现[J]. 中国农机化学报, 2019, 40(6): 173-178.
Cheng Li, Guo Xiaojin, Tan Yang. Design and implementation of remote monitoring system for intelligent agricultural greenhouse environment [J]. Journal of Chinese Agricultural Mechanization, 2019, 40(6): 173-178.
[12]孙孝龙, 吴洪昊, 周卫阳, 等. 基于新型物联网的蚕室环境管理系统设计与应用[J]. 计算机应用与软件, 2019, 36(6): 58-75.
Sun Xiaolong, Wu Honghao, Zhou Weiyang, et al. Design and application of silkworm environment management system based on new internet of things [J]. Computer Applications and Software, 2019, 36(6): 58-75.
[13]Wahl J D, Zhang J X. Development and power characterization of an IoT network for agricultural imaging applications [J]. Journal of Advances in Information Technology, 2021, 12(3): 214-219.
[14]金博丕, 王宏, 李坦, 等. 智能调节续流模式的步进电机细分控制[J]. 东北大学学报(自然科学版), 2022, 43(3): 390-403.
Jin Bopi, Wang Hong, Li Tan, et al. Microstepping control of stepper motors using the smart regulation in decay mode [J]. Journal of Northeastern University (Natural Science), 2022, 43(3): 390-403.
[15]吴勇灵, 杨娜, 潘晓慧, 等. 基于LabVIEW和Team Viewer湿度远程检测系统的设计[J]. 科技通报, 2017, 33(11): 87-89.
Wu Yongling, Yang Na, Pan Xiaohui, et al.Design on remote detection system of humidity based on LabVIEW and Team Viewer [J]. Bulletin of Science and Technology, 2017, 33(11): 87-89.
[16]牛紅星. 基于FPGA和VB的舞蹈机器人设计[D]. 兰州: 兰州大学, 2019.
Niu Hongxing. Design of dance robot based on FPGA and VB [D]. Lanzhou: Lanzhou University, 2019.
[17]樊荣, 郑刚, 植耀玲. 基于分表的闪电定位系统数据库设计[J]. 计算机应用, 2021, 41(S2): 136-138.
Fan Rong, Zheng Gang, Zhi Yaoling. Lightning location system database design based on sharding [J]. Journal of Computer Applications, 2021, 41(S2): 136-138.
[18]马金平. 基于UART串口的多机通讯[J]. 山东大学学报(工学版), 2020, 50(3): 24-30.
Ma Jinping. A multimicrocntroller communication method based on UART asynchronous serial communication protocol [J]. Journal of Shandong University (Engineering Science), 2020, 50(3): 24-30.
[19]曹珊珊. 振动环境下电连接器间歇故障诊断系统设计与实现[D]. 重庆: 重庆大学, 2021.
Cao Shanshan. Design and implementation of intermittent fault diagnosis system for electrical connectors in vibration environment [D]. Chongqing: Chongqing University, 2021.
[20]刘旭辉, 简震, 丁志娟, 等. 基于Labview的步进电机闭环控制系统设计[J]. 电力电子技术, 2021, 55(2): 54-56.
Liu Xuhui, Jian Zhen, Ding Zhijuan, et al. Design of closedloop control system of stepper motor based on Labview [J]. Power Electronics, 2021, 55(2): 54-56.