SAR 技术在舰船海面溢油监测系统的应用
2023-06-15孙建明王仁强刘昌华
孙建明,王仁强,刘昌华
(江苏海事职业技术学院 航海技术学院,江苏 南京 211170)
0 引言
石油开采平台的故障、运输船舶的碰撞、装卸过程中的失误都可能导致海上溢油的发生。一旦发生溢油,石油在海浪和海风的作用下快速扩散,不仅会带来巨大的经济损失,而且对海洋生态系统以及近海岸的自然环境产生毁灭性的伤害。海面溢油无法预测,一旦发生溢油事件,有关部门需要在短时间内获取事故发生地的相关信息,这样才能采取有效措施,在最大程度上降低对海洋生态环境的影响,因此,对海面进行全天时、全天候的监测显得尤为重要。
海面溢油监测主要分为近距离监测和遥感监测。近距离监测方法包括固定式监测、海上浮标跟踪以及利用船舶搭载监测设备,这几种方法适用于比较靠近港口、码头的范围内,监测范围较小,无法满足大面积溢油监测的需求。随着遥感技术的发展,利用航空器搭载传感器对大面积海域进行监测的遥感监测技术是目前采用的主流方法,本文基于合成孔径雷达(synthetic aperture radar,SAR),建立海面溢油监测系统,对工作原理和监测效果进行研究。
1 合成孔径雷达及工作原理
如果雷达的天线在某一位置固定不动,只能收集从地面或海面反射回来的一部分信号。反之,如果天线一直处于移动状态,就能够收集从地面或海面后向散射到各个方向的电磁波信号,获得的信息量就会大大增加。根据这个原理,如果使一个小天线连续移动,就可以得到一个虚拟的大孔径天线,从而获得与实际大孔径天线同样的效果[1],这就是合成孔径雷达(SAR)。
SAR 的工作原理如图1 所示,天线沿垂直于平台的方向进行匀速运动,并对斜下方的目标进行观测。在此过程中,每隔一段时间,SAR 会向地面或海面发射脉冲信号,并在不同的位置接收、记录、存储目标返回的信号(包括回波信号的强度和时间延迟),再对这些不同位置上接收到的信号进行合成处理,生成SAR 数据[2]。

图1 SAR 的工作原理示意图Fig.1 Schematic diagram of SAR working principle
SAR 以速度va沿X方向进行匀速直线飞行,飞行高度为h。θr表示垂直波束角,θα为航向波束角,W为测绘带宽,Lmax和Lmin分别表示最大合成孔径长度和最小合成孔径长度。被测目标可以视为一理想点p,R0为p与航线X间的垂直斜距。
假设SAR 在t=0时位于坐标原点,在某一时刻t,位置为xa=vat,点目标p此时的坐标为这个坐标固定不变,根据勾股定理可以得到在t时刻,p与雷达之间的斜距R为:
由于目标的距离与天线横向移动的距离的比值较大,运用泰勒级数展开近似可以得到
测绘带宽可以根据以下公式计算:
其中,Rf为远距点距离,Rn为近距点距离。
距离分辨率 δy由脉冲持续时间 τ或者等价的脉冲宽度去确定,θ为入射角,τ为脉冲持续时间,c为电磁波传播速度,cτ=∆r为雷达的脉冲宽度,对于真实孔径雷达和合成孔径雷达来说,两者的距离分辨率一样。
作为一种主动式微波传感器,合成孔径雷达不受光照和气候条件的限制,能够全天候工作,甚至可以透过地表或植被获取信息,因此,合成孔径雷达已经被广泛地应用于地形测绘与地质研究、农业和林业、军事、减灾防灾、海洋研究和监测等领域。
2 海面溢油监测系统
2.1 系统整体设计
本文基于星载SAR 构建一种海面溢油监测系统,系统示意图如图2 所示。整个溢油监测系统主要由雷达信号处理、图像处理、目标解译3 个模块组成。雷达信号处理模块主要是对雷达反射的回波信号进行处理,输出原始SAR 图像;图像处理模块对输入的SAR 图像进行校正、滤波、去噪、特征提取等一系列处理,得到目标区域图像,便于后续的处理。
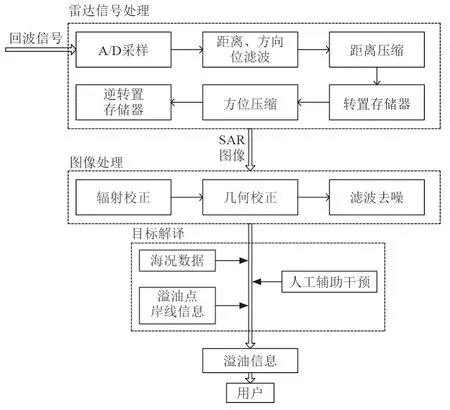
图2 基于SAR 的海面溢油监测系统示意图Fig.2 Schematic diagram of oil spill monitoring system based on SAR
目标解译模块针对处理后的图像进行信息提取,这个过程不仅要对图像本身进行解译,还需要结合溢油发生地点的相关海岸信息以及当时的海况信息,同时还需人工辅助对图像进行解译,从而得到溢油信息。
溢油信息包括溢油点位置、油膜面积大小、油膜厚度、油膜离岸线的距离等,用户根据这些信息,结合当时海面情况(海浪、风速等)及时作出有效处理措施,并对油斑的扩散进行预测,为事件后续处理提供有效的、准确的处理依据。
2.2 油膜成像原理
根据上述SAR 的工作原理可知,目标返回的信号是一种后向散射信号,SAR 是以接收这种信号作为观测依据的,而信号的强弱主要受到海面的粗糙度影响。由于海水表面毛细波的存在增加了海面的粗糙度,使得雷达回波信号较强,相应的海面区域在SAR 图像上就会表现出亮色特征[3]。
如图3 所示,当溢油事故发生后,油膜覆盖了海水表面,海水的表面张力发生改变,对产生的Bragg散射(Bragg scattering)的海面毛细波和短重力波起阻尼作用,使得海面粗糙度变小,后向散射回波减小,信号强度变弱。在SAR 图像上呈现出来时,油膜的图像亮度低于周围海面的亮度,被油膜覆盖的海面在SAR 图像上表现为暗色斑块[2,3]。
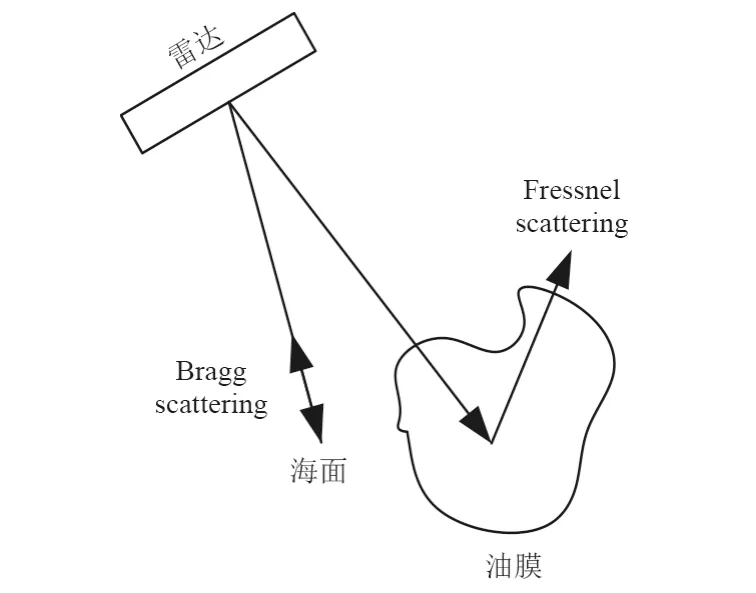
图3 油膜成像原理示意图Fig.3 Schematic diagram of oil film imaging principle
2.3 图像处理方法
常用的噪声滤波算法包括Lee滤波、改进的Lee 滤波、增强的Lee 滤波、Frost 滤波、增强的Frost 滤波、Gamma 滤波等。每种滤波方法的特点不一样,本文利用平滑指数SI()来判断各个滤波器的效果,MEAN 为由分布目标回波所形成的均质区域的像元灰度均值,STD 为标准差,SI 值越大,表示平滑效果越好[4]。几种滤波方法的SI 对比效果如图4 所示。

图4 各滤波器平滑指数SI 对比Fig.4 Comparison of filter smoothness index SI
可以看出,Enhanced Lee 和Gamma 在窗口大小情况相同的条件下,平滑指数很接近,比其他滤波器有比较明显的优势,这2 种滤波器均可以用于溢油监测中的斑点滤波,本文选择Gamma 滤波。
为了辨别、区分图像中不容易辨别的暗色区域,本文利用灰度共生矩阵中的特征向量对油膜、海水、非油膜进行纹理分析。同时,在海面上存在很多干扰因素,比如海洋中的浮游生物、船舶行驶形成的船尾轨迹、海洋中的自然表面都会使海面粗糙度发生变化,从而影响雷达信号,因此,监测过程中要对这类“非油膜”进行辨别、分类。
2.4 油膜厚度和面积估算和漂移模型
为了能够更有效地处理溢油事件,在对溢油监测过程中,必须要对溢油点的油膜厚度以及油膜面积进行估算,以便对油膜扩散做出更精准的判断。采用如下油膜厚度估算模型[5]:
式中:h为油膜厚度,S为溢油面积,t为溢油时间,W为海上风速,ρw为海水密度,ρoT为当温度为T时的油膜密度。
油膜面积可以利用公式Sos≈Nos×R2来估算,其中,Sos为海面溢油区域的面积,Nos为溢油区域像素点数,R为卫星的分辨率[6]。
溢油发生后,油膜会随着海浪及海风快速漂移和扩散,这个过程具有随机性,受到的影响因素很多,目前还没有十分理想的漂移数学模型,采用如下方法建立漂移模型[7]:假设油膜的漂移速度为V,油膜的起始中心位置为Oo,则有V=Vt+KwVw;经过时间t后,油膜的中心位置为O=Oo+Vt。
合并上述两式可得O=Oo+(Vt+KwVw)t,其中,Vt表示海流速度矢量,Vw表示海上风速矢量,Kw表示海流漂流系数。
2.5 实验结果
基于建立的海面溢油监测系统,对实验区域中的条状油膜和块状油膜进行测试,结果如图5 所示。
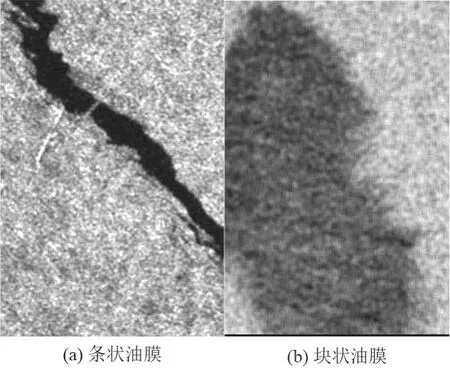
图5 SAR 溢油监测系统输出图像Fig.5 SAR oil spill monitoring system output image
可以看出,油膜区域的亮度比周围非油膜区域的亮度要低,同时,可以把非油膜区域比较清楚地分辨出来,只识别了溢油区域,能够达到对溢油监测的效果。
同时,还对4 种面积不同的监测区域进行了探测率实验,实验结果如图6 所示。
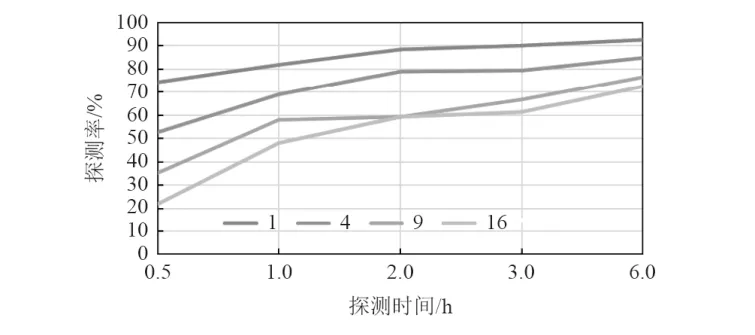
图6 溢油监测探测率Fig.6 Oil spill monitoring detection rate
可以看出,监测区域面积越小,探测率越高,最高可以达到91% 左右,相反,面积越大,探测率越低。同时,探测率随着探测时间的增大而增大,对于面积最大的区域,随着探测时间从0.5 h 增加到6 h,探测率从20%左右提高到72%左右。
3 结语
基于合成孔径雷达的海面溢油监测系统,可以全天时、全天候对海面进行监测,能够有效地辨别油膜种类,区分出非油膜区域,同时能估算出油膜厚度和面积,为有效处理海面溢油事故提供了可靠的数据。由于海上情况复杂,在后期的研究中,可以对该系统进行优化与改进,使该系统能够适用于各种复杂环境中的海面溢油监测。
