自治潜水器作业安全风险因子研究
2023-06-13马良,杨照,李鹏
马 良,杨 照,李 鹏
(青岛海洋科技中心,山东 青岛 266237)
0 引 言
海洋运载设备是大型海洋调查设备的一类,主要有HOV,ROV,AUV等,其中自治潜水器(autonomous underwater vehicle, AUV)自带能源,能够按照人类事先编制的程序航行和作业,或自主根据赋予使命、作业环境和自身状态确定航行路线和完成探测作业[1 – 5]。AUV具有相对安全(无人)、活动范围广(不受电缆约束)、机动性强等优点,同时由于其自主工作在海洋环境中,安全性是其研究和实用化过程中重要问题之一[6−7]。
由于海洋环境的复杂性,AUV丢失损坏事故时常发生,相关案例屡见不鲜。2005年,曾为南极冰架下海洋环境与资源探测做出巨大贡献的英国Autosub2 AUV在南极Fimbulisen冰架下作业时,因电源硬件或连接器故障导致系统电源失效,进而使得主控系统错误下达抛载上浮命令,最终导致陷入200 m厚的冰层而无法浮出水面而丢失。2010年,美国伍兹霍尔研究所潜深6000米级别的AUV ABE在智利沿海探测时,因耐压舱被压破碎而丢失。2013年,日本海上自卫队用于调查海底状况的水下机器人在青森县的津轻海峡丢失。2014年,当时世界上最大深度的混合型遥控水下机器人“海神”号(Nereus),在新西兰东北克马德克海沟9990 m的深度丢失。此外,据报道用于组建反水雷无人水下航行器系统的Remus100,在近5年美国海军组织的多AUV协同试验中丢失。2014年,西北工业大学研制的50 kg AUV在联合海上试验时由于通信系统故障丢失,幸运的是1周后渔民作业时发现了该AUV。2017年,我国首台下潜深度超过万米、创造了我国无人潜水器下潜及作业最大深度记录的自主遥控水下机器人(ARV)“海斗”号,在深海联合航次中永远留在了马里亚纳海沟挑战者深渊。AUV作业过程中面临的一系列风险因子,严重威胁AUV的作业安全,并会造成重要财产和数据损失,已成为限制AUV技术发展和推广应用的重要因素[8−9]。
1 AUV全寿命剖面与典型任务剖面分解
1.1 AUV全寿命剖面分解
剖面一词的含义是对所发生的事件、过程、状态、功能以及所处环境的描述,事件、状态、功能及所处环境都与时间有关,因此这种描述事实上是一种时间序列的描述[10]。AUV的全寿命周期是指从AUV产品交付验收到寿命终结退役的全过程,寿命剖面主要包括基地维修、AUV装箱转运、系统复机和海上作业。寿命剖面是环境条件分析的基础,根据AUV寿命剖面的各个阶段,分析AUV各阶段经受的主要环境应力及其大小以及可能受到的作业风险。AUV全寿命剖面图如图1所示。
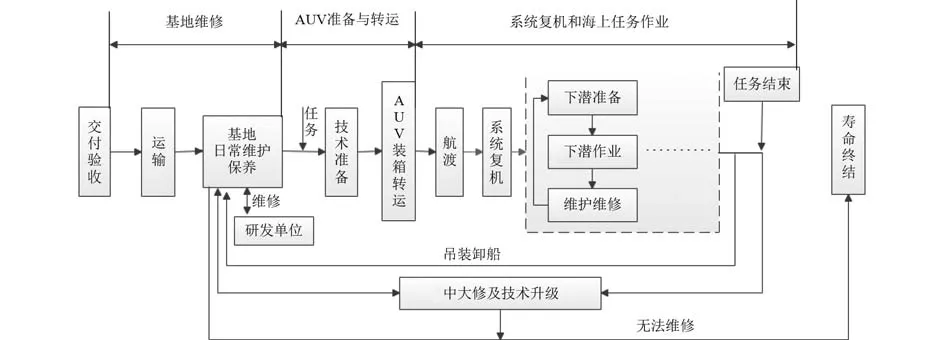
图1 AUV全寿命剖面图Fig.1 Life profile of AUV
1)基地维修作业阶段
AUV作业装备交付使用后,在航次开始前,一般要在维护保障基地车间进行常规维护保养作业,常规维护保养作业主要是设备的调试检查,检查维护内容一般按照AUV 出厂时的出厂要求开展,基地维修保养一般按照设备服役周期分为日常保养、中修及大修,维修保养的任务是保证AUV 处于适航状态,基地维修阶段尾期可开展水池测试或湖上调试。对于任务返回后的AUV故障一般需要在基地维修阶段进行修复,保证下次任务出航前能够修复故障,对于出现的一些重大故障或损坏,一般返回研制厂家进行维修。
2)AUV准备转运阶段
当接到AUV海上作业任务后,需要立即启动AUV装箱转运工作,包括设备的调试测试,备品备件的采购准备,设备的装箱、特殊作业工具的准备调试、设备的转运与上船,人员的动员,动复原阶段涉及设备的转运、吊装等作业,涉及到外场一些作业的操作拥有一定安全风险。
3)系统复机和海上作业任务阶段
AUV设备上船后,首先进行系统的复机和调试,然后正式进入海上作业阶段。此阶段AUV及其附属设备一般在母船上,航渡到达作业海区后,根据作业计划和海区气象及母船状况进行潜水器作业。潜水器作业包括下潜前准备、AUV布放、水下自主航行、AUV回收、甲板检修,按照作业要求循环进行下潜作业。水下自主航行阶段也是整个设备面临作业风险最多的阶段,大部分AUV设备丢失及损坏等都出现在自主航行阶段。
1.2 AUV典型任务剖面分解
由于不具备水下操作组件,通常情况下AUV只能进行水下探测或观测等任务,无法潜入海底替代人类进行各类作业。AUV按照其设计功能不同,一般可以分为科考探测型AUV和军事运载型AUV。对于科考作业型AUV任务作业的任务剖面描述为:AUV携带科学探测仪器在完成规定的使命巡航探测任务过程中所经历的事件和环境的时序描述。以科考探测型AUV为例,对AUV的任务剖面进行分解。科考探测型AUV作业分为海面设备复机检查—母船机动到达下潜点—下潜前硬件检查—起吊AUV—释放磁力缆—AUV到达海面—水面人员脱钩—AUV开始下潜—布放声通信机—测试定位—AUV到达水下预定位置—确认位置—按照规划轨迹自主航行—母船随航—AUV完成预定轨迹或电池电量耗尽或应急抛载上浮—水面人员回收声通信机—AUV出水—水面人员挂钩—起吊AUV—回收至甲板—淡水冲洗—科学数据下载—甲板拆检维护。按照深度剖面和时间剖面将该典型作业进行任务剖面分解,其任务剖面分解图如图2所示。
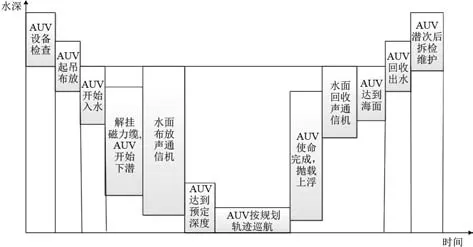
图2 AUV水下作业任务剖面图Fig.2 Profile of AUV underwater operation
1.3 AUV典型环境剖面分解
AUV产品的使用环境直接决定了其作业的风险条件,因此对系统的典型环境剖面进行分解,系统分析其寿命剖面和任务剖面下的环境剖面,通过环境剖面加入人的因素就可分析AUV作业过程中的风险因子,并依据环境条件进行风险因子的系数选取。AUV全寿命周期主要分为基地维修阶段、动复原阶段、海上作业阶段,按照3个阶段的任务剖面对环境剖面进行分析。
1)基地维修阶段的环境条件
基地维修阶段AUV设备一般在厂房中进行拆捡维修,在没有任务阶段,基地拆捡维修所占时间比例较大,在基地维修阶段主要外部环境条件影响为温度和湿度,AUV与ROV同为海上调查专用设备,运行保障条件具有相似性,根据一般海上设备存储车间国家标准,一般AUV 维护贮存车间需要满足温度在5℃~30℃,相对湿度在40%~70%。
2)动复原阶段的环境条件
AUV动复原阶段,AUV设备将被装入集装箱内起吊运输至工作船,并运抵至作业海区。虽位于集装箱内,但AUV在运输过程中也将承受运输振动应力作用,需要做好系固等操作。
3) 海上作业阶段的环境条件
海上作业阶段分为母船航渡阶段、布放回收阶段、水下作业阶段,3个阶段承受的外部环境条件有较大差别,分3个部分对环境条件进行分析。
① AUV母船航渡阶段
AUV装载在支持母船后,随着母船航渡过程中,由于母船及波浪载荷产生较大的震动,震动载荷施加在集装箱上,集装箱内的AUV将产生较大幅度的运动,导致AUV结构系统系固部位承受较大的载荷。
② 布放回收阶段
与ROV不同,AUV布放回收灵活,对母船具有更大的适应性,一般只需要船载吊车或A型架系统满足AUV布放回收的提升力要求即可。由于AUV为水下无人无缆式自主航行器,布放入水后,便于母船失去物理连接,因此在AUV的布放阶段,需要采用多人拉缆的方式做好止荡和防撞措施同时考虑海况影响及船舶摇晃剧烈程度适当增加水面支持人员。
③ 水下自主航行阶段
广义上的自主航行阶段又可以分为2个层次,一个是AUV布放入海后的自由下降和抛载后的自主上浮阶段,另一个是按照预定规划路线和使命任务自主航行阶段。由于海底除局部复杂地形外,一般大深度海底的水流运动速度微小,因此在自主航性阶段AUV可以保持较平稳的速度航行。
2 AUV作业过程中风险因子分析
2.1 下潜作业前的风险因子
在开展海洋调查时船上作业空间较小、作业时间较长、海况复杂多变,在下潜作业前,易受季节性海洋气象影响,有可能发生船体摇晃,AUV与船舶碰撞等突发事故。同时,操作人员的技术水平及航次的组织协调能力都有可能对AUV仪器设备损坏和丢失的风险产生影响。AUV下潜作业前面临的风险因子如表1所示。

表1 AUV下潜作业前的风险因子分析表Tab.1 Risk factor analysis before AUV diving
2.2 下潜作业过程中的风险因子
在调查作业中,使用方式不同的仪器设备存在的风险不同,仪器设备使用方式也是影响仪器设备使用风险的主要因素[11−12]。AUV这种在调查作业时完全与船体分离且与船体无连接的仪器设备损坏和丢失的风险较高。主要考虑方面为:使用机时、系统性能、海况条件等。在AUV的布放与回收过程中,还需要考虑母船的影响,包括稳性、耐波性和操纵性能等。AUV水下作业时的失效和风险因子主要由AUV本身的技术参数决定。AUV下潜作业过程中的风险因子分析表如表2所示。

表2 AUV下潜作业过程中的风险因子分析表Tab.2 Risk factor analysis during AUV diving
2.3 作业后水面拆检阶段的风险因子
AUV回收至水面后需要进行潜次后的拆检维护操作,技术人员的维护维修技能需通过专业的知识储备、完善的培训体系和丰富的实践经验获得。AUV作业后水面拆检阶段的风险因子分析表如表3所示。

表3 AUV作业后水面拆检阶段的风险因子分析表Tab.3 Risk factor analysis during inspection after AUV operation
3 结 语
AUV作为深海移动式观探测平台,不仅造价高昂,其承担的作业任务往往更加重要,因此对AUV作业安全风险因子的分析即显得尤为重要。AUV全寿命期剖面主要包括基地维修、AUV准备转运、系统复机和海上作业任务3个阶段,影响AUV安全作业的关键安全因子有操作人员素质、动复原操作、设备本体可靠性、水下作业环境等,各因子影响的范围和程度均不同,要全面考虑各因子对AUV作业的综合影响,做好相应的预防措施和应急预案,重点注意操作规范和日常维护保养,保障装备的稳定可靠运行。
