多准则粒子滤波下的无人艇航行轨迹虚拟重构
2023-06-13李克玲
李克玲
(长春大学 计算机科学技术学院,吉林 长春 130022)
0 引 言
通过图像数据分析和计算机视觉处理技术进行无人艇航行轨迹虚拟重构处理,提高对无人艇航行轨迹模拟和控制能力,在对无人艇航行轨迹虚拟重构中,采用数据特征与 RGB 图像分析方法[1],结合虚拟现实的视景仿真技术进行图像信息增强处理,构建复杂场景下的无人艇航行线路和轨迹跟踪模型,通过高层特征的融合方法,结合图像视觉增强技术,提高对无人艇航行轨迹虚拟重构和跟踪识别能力,研究无人艇航行轨迹虚拟重构方法,在实现对无人艇的全局信息增强和目标跟踪方面具有重要意义[2]。在对无人艇航行轨迹虚拟重构设计中,采用影像端元的谱特征分析和影像空间采样技术,实现对无人艇航行轨迹图像检测,结合端元光谱的空间变异方法,通过点云数据在特征空间分布特性,进行无人艇航行轨迹的虚拟重建。本文提出基于多准则粒子滤波的无人艇航行轨迹虚拟重构方法。首先进行无人艇航行轨迹图像采集,然后采用融合双模态特征检测方法实现对无人艇航行轨迹的图像检测,结合多准则粒子滤波分析方法,实现对无人艇的航行轨迹重构,并通过Matlab进行图像仿真。
1 无人艇航行轨迹的图像检测和预处理
1.1 无人艇航行轨迹图像检测
为了实现对多准则粒子滤波下的无人艇航行轨迹虚拟重构,采用几何单形体体积法构建图像采集模型,根据对无人艇的航行方向规划设计[3],进行航迹分布的三维坐标设计,如图1所示。

图1 无人艇的航行方向规划坐标系Fig.1 Navigation direction planning coordinate system of unmanned craft
根据图1所示的无人艇的航行方向规划坐标分布,以像素点θe,ρe为2个端元间的光谱特征点,采用单形体的顶点与端元分析方法[4],得到观测向量集合的灰度像素集:
式中:V为影像的纹理特征,(xi−1,yi+1)为端元提取参数,I(xi+1,yi−1)为端元光谱信息散度,通过椭圆的参数代替轮廓进行相应位置的端元匹配。
结合对无人艇航行轨迹图像的边缘特征分析,得到无人艇航行轨迹图像边界特征分布表达为:
式中:Gray表示无人艇航行轨迹控制点的灰值,Edge为边界检测函数。
由此建立无人艇航行轨迹图像检测模型,通过边分区边界的像素融合实现轨迹虚拟重构[5]。
1.2 无人艇航行轨迹图像滤波处理
采用双阶段 RGB-D 显著性检测方法进行无人艇航行轨迹图像的融合和增强处理,将无人艇航行轨迹图像进行动态分割,构建图像梯度检测模型,结合单峰特征的提取方法[6],得到无人艇航行轨迹的跟踪的权重分布函数为:
式中:t为无人艇航行轨迹检测目标的置信损失分配时间点,f(k,N)为无人艇航行轨迹跟踪模拟的干扰因子,avg为像素级强度分布均值。
对 RGB 特征和增强后的深度特征进行分段融合,进一步获取交融模块分布函数,得到各层深度图的糊度分布集:
式中:τ0为高层融合跨模态门限因子,ωd为推导出门限因子,u(t−τ0)表示航迹检测的尺度因子。
从低层次的2种模态特征进行特征匹配,得到图像质量分布模型参数,根据本层RGB特征和增强后的深度特征融合结果,得到滤波输出:
式中:avgdl表示目标模板和搜索区域的目标特征匹配值,fsearch表示多层特征融合预测模型参数,n为前置门限,d为第i个滤波器窗口的加权融合分类信息,l为分层联合双边滤波参数。
根据图像滤波结果,采用融合双模态特征检测方法实现对无人艇航行轨迹的图像检测,结合视觉分割技术进行图像滤波处理。
2 无人艇航行轨迹虚拟重构优化
2.1 无人艇航行轨迹多准则粒子滤波
把注意力机制融入到航迹跟踪模型中,得到无人艇航行轨迹多准则粒子滤波配集为B0,在位置信息注意力模块中,得到全局空间信息分布的平均值表示为:
式中:Rm(r,i)为qj处出现背景信息干扰的深度值,i下标为边缘模糊和纹理特征点。N为输入特征图沿水平方向的像素点数,m为全局空间信息维度,τ为采样时间延迟。
获取2个方向上的通道参数,得到粒子滤波集群参数为:
利用线性加权得出整体的响应特征值,得到多准则滤波输出矩阵为:
式中:a表示随机选取数据集中一个视频参数分布维度。
根据复点聚类,表示为:
综上,在同质区域进行端元提取,结合多准则粒子滤波,实现航迹重构,实现流程如图2所示。

图2 无人艇航行轨迹多准则粒子滤波流程Fig.2 Multicriteria particle filter process for unmanned boat navigation trajectory
2.2 无人艇航行轨迹的三维虚拟重构实现
采用三维数据场可视化分析的方法,基于计算、裁剪、纹理映射方法,得到模糊集函数为:
式中:r为三维数据场可视化分布的平均值,A为体数据中提取的聚合参数,Rin为三维数据场的部分属性特征分布集,e−ikr为体绘制指数增益。
基于三维数据场可视化的数据获取和跟踪识别的方法,得到边界模糊集分配函数为:
式中:ain为 三维数据场可视化的数据动态分布集,ejψin为结构化类型的数据集,A为三维空间数据场外部轮廓,r为相同属性值的数据点集合。以相同属性值的数据点的集合为轨迹分布集,得到边缘分布像素分布函数为:
式中:αi和α∗i表示断层序列图像上的外部动态分布特征,k(xi,xj)表示相同属性值的数据点分布核函数,b表示拓扑结构重建的几何参数,通过各层图像轮廓线之间相互动态分量,得到重建的轨迹线表示为P={1,···,P}。
通过图像增强、去噪处理,得到自适应权重值分布矩阵为:
式中:t为图像中的轮廓线分布时延参数,BER为上下2层轮廓线上对应节点的误差率,xk表示三维重建模型质量分布参数,yk为2层轮廓线节点的模糊隶属度。
以体素作为最小处理单元,得到qj处像素的深度值为:
式中:Eint(vi)表示体素来模拟无人艇航行轨迹的等值面计参数值,Eext(vi)表示某一属性的动态轨迹分布参数,N表示相同属性值的等值面体素。
综上,实现对无人艇航行轨迹的虚拟重构,重构实现结构图如图3所示。
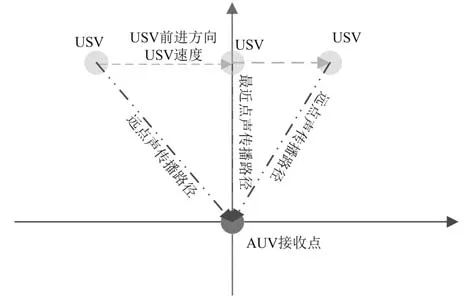
图3 无人艇航行轨迹的虚拟重构实现结构图Fig.3 Virtual reconstruction implementation structure of unmanned craft navigation trajectory
3 仿真测试
为了验证本文方法在实现无人艇航行轨迹虚拟重构的性能,采用Matlab进行实验测试,透明度的范围为0~1,航行轨迹采样点所在体素的 8 个顶点,无人艇与拖曳体之间距离为339.479 m,信噪比为−4.507 19 dB,各个航迹采样点的图像像素点分布如表1所示。
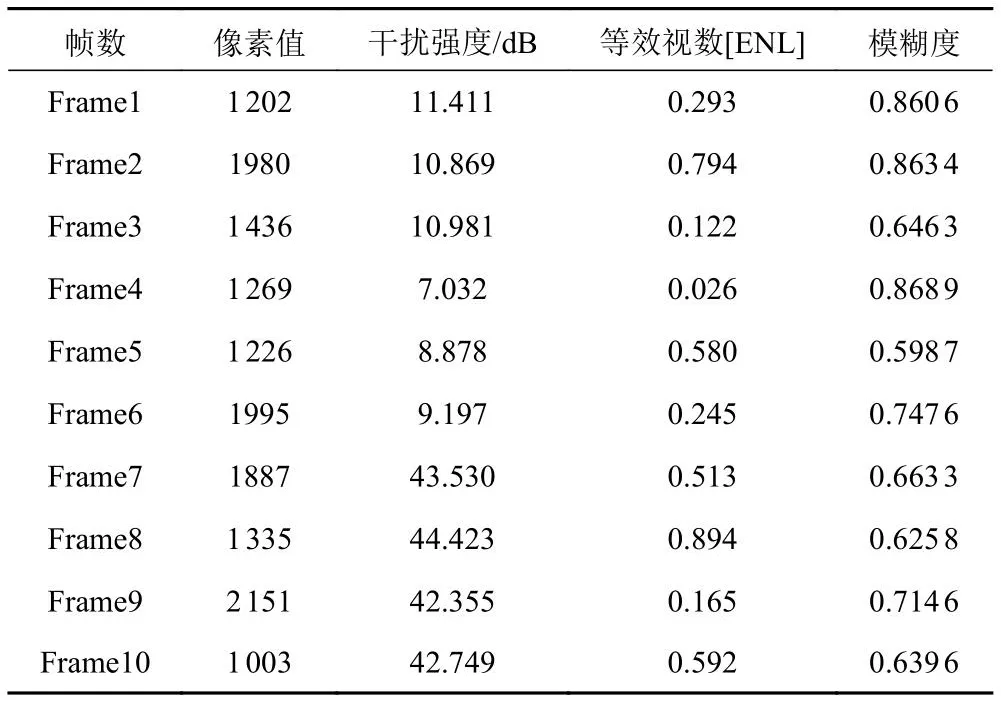
表1 航迹采样点的图像像素点分布Tab.1 Pixel distribution of the image at the track sampling points
根据表1参数设定,进行航迹虚拟重构。采用本文方法可以进行无人艇航行轨迹的重构虚拟重构,测试轨迹跟踪的性能,得到重构性能测试如图4所示。分析可知,本文方法进行无人艇航行轨迹虚拟重构的视觉增强能力较好,期望值和实际值拟合性能较好。

图4 无人艇航行轨迹重构Fig.4 Reconstruction of unmanned boat navigation trajectory
4 结 语
构建复杂场景下的无人艇航行线路和轨迹跟踪模型,通过高层特征的融合方法,结合图像视觉增强技术,提高对无人艇航行轨迹虚拟重构和跟踪识别能力本文提出基于多准则粒子滤波的无人艇航行轨迹虚拟重构方法。通过无人艇航行轨迹多准则粒子滤波和图像处理,实现无人艇航行轨迹虚拟重构,分析可知,本文方法进行轨迹重构视觉效果较好,响应性能较强。
