改进粒子群优化算法的舰船三维路径规划
2023-06-13郑勇明
郑勇明
(东华理工大学 长江学院,江西 抚州 344000)
0 引 言
在舰船编队作战和调度中,需要结合舰船的空间方位信息进行路径规划设计,采用分布式的编队控制技术,结合对舰船目标信息估计和方位参数分析,构建舰船编队的分布式组网控制模型,结合路径规划方法,实现对舰船编队的三维路径规划设计,提高舰船的作战规划能力。在进行舰船的三维路径规划设计中,需要通过对舰船的刚体平移和旋转性参数分析,结合控制器设计和中心节点分布设计,实现对舰船三维路径规划设计[1]。
目前,对舰船三维路径规划方法主要有粒子滤波算法、点跟踪识别算法、Kalman滤波估计方法等,通过路径动态检测方法[2],根据舰船编队的空间分布数据进行动态加权和最短路径寻优控制,建立舰船三维路径规划模型,实现舰船三维路径规划[3]。但传统方法进行舰船三维路径规划的实时性不好,为此,本文提出基于改进粒子群优化算法的舰船三维路径规划方法。首先采用视点模型跟踪方法实现对舰船三维路径移动任务规划设计,然后通过改进粒子群仿生算分获取虚拟刚体状态约束特征值,结合方位信息编队移动分布情况,实现对目标舰船编队的形成、保持与跟踪识别,通过对舰船目标三维参数估计结果实现对舰船的路径规划。最后,进行仿真测试。
1 舰船三维路径移动任务参数分析
1.1 舰船三维路径视点模型跟踪
为了实现改进粒子群优化算法的舰船三维路径规划,首先采用视点模型跟踪方法实现对舰船三维路径移动任务规划设计。将舰船编队目标视为一个刚体结构[4],舰船三维路径规划问题为一个具有未知扰动的二阶模型参数分析问题,通过构建时变编队控制策略,采用误差的收敛性判断与编队系统规划设计的方法[5],获取虚拟刚体状态约束特征值,得到舰船三维路径视点模型和刚体分布模型如图1所示。采用粒子群规划方法,构建集中式编队控制模型,得到系统中某几个机体的虚拟位置参数信息,采用一阶、二阶模型参数识别,得到机体感知动态参数为lc。

图1 舰船三维路径视点模型和刚体分布模型Fig.1 3D path viewpoint model and rigid body distribution model of ships
将舰船的动力学模型描述为一个二阶微分方程,得到惯性坐标系下的姿态旋转矩阵,第i个粒子的lc取值为:
式中:lcMax和lcMin分别为基于位置的编队控制下的学习过程参数的最大与最小值,本文选用lcMin=0.05,lcMax=0.5,α为大于0的常数。
采用方位信息对期望队形进行自适应控制,得到系统动力学模型梯度分布函数为:
式中:F(x)表示各机体的初始位置分布模糊度函数,vi(x)为舰船编队的个体集合参数,在即有向图中的一条边,如下式:
式中:ca表示工作空间和构形空间采样的特性,xa表示局部规划器的动态特性,Edge表示全局规划的有向边,StartID表示障碍物发生碰撞的初始ID,EndID表示沿着障碍物边界分布的终止ID。
根据舰船路径分布点的方位信息,用N表示样本点的类型,基于倾角分层的倒角距离参数分布集合为:
式中:e1,e2,e3···eM均为方位距离误差。
采用大范围搜索和小范围组合控制,得到舰船三维路径的空间规划函数为:
式中:J为横向平移误差,ta0为不同位姿下与边缘正自适应系数,ca为模型中心投影位置参数。
由此构建了舰船三维路径视点模型跟踪模型,根据粒子群跟踪识别方法,进行路径寻优。
1.2 舰船的方位信息及编队任务分布
通过大量的像素点融合和方位信息估计,得到粒子群状态参数为T60,在非固定路径引入的视角偏移,得到路径规划的Hama寻优分布为Xi(t)=(xi1(t),xi2(t),···,xiD(t)),求解数据之间的关联性,在并行寻优控制算法下,得到最短分布距离T0,U0,V0,在视觉里程计估计位姿分布下,得到粒子群的个体信息素为T61,从场景外观描述路径规划的干扰分量,得到路径规划的过程融合迭代模型为p1=(p1x,p1y,p1z)T,以最短路径为寻优目标函数,得到多串联点分布式模糊度信息量为T1,U1,V1,深度学习的闭环检测体系下的梯度学习过程参数为:
式中:T为场景记忆模型参数,U0为传感器数检测的偏移,V0为闭环决策模型参数,U1为组合映射特征值,V1为二阶稳态特征值,T1为粒子寻优模糊度特征量。
选择不同的指标权重,得到场景非结构化融合机制下的粒子群寻优参数xi,yi,zi,Ti,Ui,Vi(i=1,2,···,6)。根据模糊控制方法,进行改进粒子群寻优,得到多个舰船编队及其语义信组合控制下的粒子群控制方程:
式中:s表示执行闭环检测的定位误差,c表示全局特征描述符,θi为位姿相位,di为2个节点之间的距离分量,基于的位姿和环境地图参数分析,得到非结构化环境下基于方位信息检测的规划模型参数为P0,P1,P2,···,Pn,舰船编队全局路径自主规划的空间变化矩阵由此得到舰船的方位信息及编队任务分布模型。
2 舰船三维路径规划实现
2.1 舰船方位信息估计
建立舰船编队的多串联点分布式寻优模型,结合方位信息编队移动分布情况,实现对目标舰船编队的形成、保持与跟踪识别,得到最短路径寻优的目标方位参数估计值为:
式中:τ为目标的方位信息及其他分布信息,f为舰船目标的扩展频率参数,t为时间参数,µ为第i个分布源的角度自相关核,Ds(f,µ)为同一目标体内不同角度动态参数。
以最短路径为寻优目标函数,得到分布式目标个数分布为T1,U1,V1,采用分布式目标信号源估计方法,根据信号中心频率,相关分布式目标模型表示为:
式中:aij为舰船辐射的相关信号源(PCD源),定义{Wfinal}={{WH},{WC},{WO}}为舰船三维路径分布的实时状态,得到实时状态参数估计式为:
由此构建了舰船方位信息估计模型,结合方位信息编队移动分布情况,实现对目标舰船编队的形成、保持与跟踪识别。
2.2 路径规划粒子群优化算法
采用粒子群路径规划方法,结合离散时间间隔采样,得到粒子群寻优节点i与节点之间j之间的联合分布式为:
式中:xi(t)为单峰分布的函数,vi(t+1)为统计特性。
采用零均值的复值闭合参数分析的方法,得到舰船的方位及路径寻优的动态函数为:
式中:aij为点目标信号源参数,b(k)为每一束信号的随机增益分布矩阵,bH(k)为b(k)的酉矩阵。
初始化粒子种群,根据对舰船的实时动态信息参数估计,实现对舰船三维路径规划。
3 仿真测试
对舰船三维路径规划的仿真实验中,给出舰船编队有32个阵元组成,相邻舰船的间隔为λ/2,λ对应中心频率的波长,舰船三维路径分布的组网间隔为2 000×1 200,粒子种群个数为3 000,舰船编队路径的空间节点分布如表1所示.

表1 舰船编队路径的空间节点分布Tab.1 Spatial node distribution of ship formation paths
据参数设定,进行舰船三维路径规划设计,初始舰船方位分布如图2所示。

图2 舰船目标初始方位分布Fig.2 Initial azimuth distribution of ship targets
采用本文方法进行三维路径规划,首先对舰船目标的空间位置进行估计和跟踪识别,如图3所示。
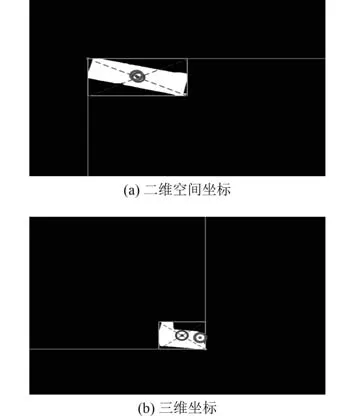
图3 舰船目标空间位置估计和跟踪识别Fig.3 Estimation and tracking recognition of ship target spatial position
根据对空间方位估计结果,进行三维路径规划,如图4所示。
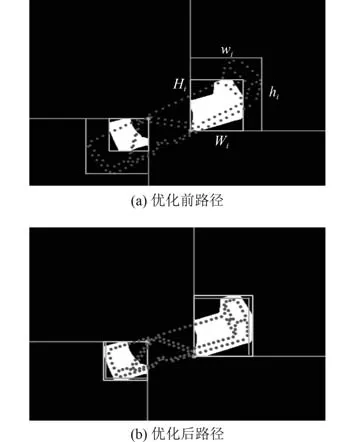
图4 舰船三维路径规划Fig.4 3D path planning for ships
分析可知,本文方法对舰船三维路径规划的空间分布定位能力较好,能准确估计舰船位置和空间方位信息,测试舰船目标定位精度,对比结果见表2。分析可知,本文方法实现舰船路径规划,定位精度较高。
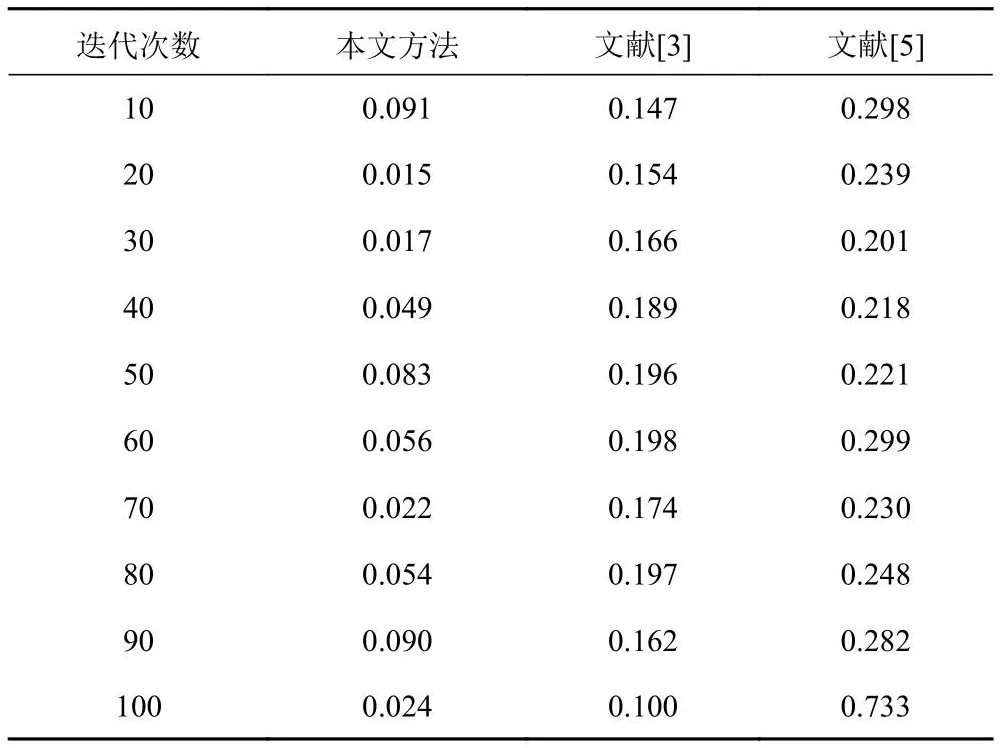
表2 舰船方位估计误差对比Tab.2 Comparison of ship azimuth estimation errors
4 结 语
本文结合对路径规划方法,实现对舰船编队的三维路径规划设计,提高舰船的作战规划能力。提出基于改进粒子群优化算法的舰船三维路径规划方法,构建时变编队控制策略。采用误差的收敛性判断与编队系统规划设计的方法,获取虚拟刚体状态约束特征值。建立舰船编队的多串联点分布式寻优模型,结合方位信息编队移动分布情况,实现对目标舰船编队的形成、保持与跟踪识别。分析可知,本文方法对舰船三维路径规划的空间分布定位能力较好,能准确估计舰船位置和空间方位信息。
