一种自助磨刀机的设计
2023-06-08侍中楼秦工徐少震何冬梅雷福根
侍中楼 秦工 徐少震 何冬梅 雷福根


摘要:基于菜刀打磨原理,设计了一款操作简单、安全的磨刀机。在磨刀机的结构设计上,设计了一种夹具,使对刀机构实现菜刀刀刃精准定位、夹紧装置实现对菜刀刀背固定的目的;选择双螺旋圆柱凸轮传动机构,实现磨刀块和抛光块的直线往复运动;采用Wio Terminal开发板对光传感器反馈的信号进行处理,然后对显示屏的运行状态和电机转动进行控制。该设计可以对不同尺寸的菜刀进行打磨,实用性强,且符合共享理念。
关键词:自助磨刀机;对刀机构;圆柱凸轮;共享
中图分类号:TH122 文献标志码:A 文章编号:1671-0797(2023)11-0046-03
DOI:10.19514/j.cnki.cn32-1628/tm.2023.11.012
基金資助:2021年度湖北省大学生创新创业训练项目“自助磨刀机”(S202111072028)
0 引言
家用菜刀使用一段时间后,难免会出现刀刃因强度不足而磨损、卷曲或断裂等现象,常见的解决方式是用磨刀器对刀刃进行打磨,使其变得锋利。
一般而言,磨刀器有磨刀石、磨刀棒、手持式砂轮、手动磨刀器以及电动磨刀器等。磨刀石的使用,需要有经验的人来操作且效率相对较低。磨刀棒对刀刃的打磨不彻底,打磨效果不好,且容易滋生细菌。手持式砂轮的打磨方式快捷,但打磨的厚度(刀刃的厚度)不均匀,还容易产生飞溅的火花,刀容易产生跳动和外弹现象,使用不安全。手动磨刀器与电动磨刀器结构大体相同,以电动磨刀器为例,现有的磨刀器,其磨刀槽深度相同,在打磨不同菜刀的刀刃时,刀刃在磨刀槽的深度需人为控制,位置不精确,容易造成打磨不到位或过度打磨的问题[1]。
综上所述,现有的磨刀器难以兼具刀刃定位精准及磨刀质量良好的效能。本文通过设计一种自助磨刀机,在结构上进行创新,能够有效解决菜刀在打磨过程中遇到的精度和安全性等方面的问题。
1 工作原理
本设计提出一种打磨菜刀用的自助磨刀机,如图1所示。自助磨刀机在无人使用的情况下是待机状态,当机器外面的红外传感器检测到有人靠近时,机器显示屏亮,显示二维码,用户通过扫描二维码进行支付,支付完成后,显示屏显示演示动画,用户根据演示动画的提示将菜刀放入磨刀机中。菜刀放入后,箱盖关闭,通过对刀机构对菜刀刀刃进行定位,夹紧机构将菜刀刀背部分夹紧固定,传动机构将磨刀块和抛光块推到菜刀的刀刃部分。直流减速电机通过一对啮合齿轮带动圆柱凸轮做等速回转运动,位于圆柱凸轮凹槽部分的导向块在圆柱凸轮的作用下沿凹槽运动,从而带动磨刀块导槽沿导轨做直线运动。导向块沿右旋凹槽运动时,磨刀块导槽向右运动,在右旋凹槽的最右端通过与左旋凹槽连接,实现在圆柱凸轮最右端换向的目的,即在圆柱凸轮最右端,导向块由右旋凹槽换到左旋凹槽,从而使导向块带动磨刀块导槽向左运动,实现向左磨刀,最终实现磨刀块沿导轨做往复运动,达到多次打磨菜刀的目的[2]。
通过实践操作可得打磨时间设为8 min时得到的刀刃质量较好,抛光时间设为2 min就可得到符合光洁度要求的刀刃,因此,程序设定的打磨时间为8 min,打磨完成后,抛光块两侧电机转动将菜刀夹紧,磨刀块两侧电机向两边移动,进行抛光,程序设定的抛光时间为2 min,打磨抛光完成后,各部件回到初始位置,显示屏显示取出菜刀的动画,整个磨刀过程结束。自助磨刀机控制流程如图2所示。
2 主要结构设计
自助磨刀机主要由对刀机构、夹紧机构、圆柱凸轮传动机构、打磨抛光机构构成。
2.1 对刀机构
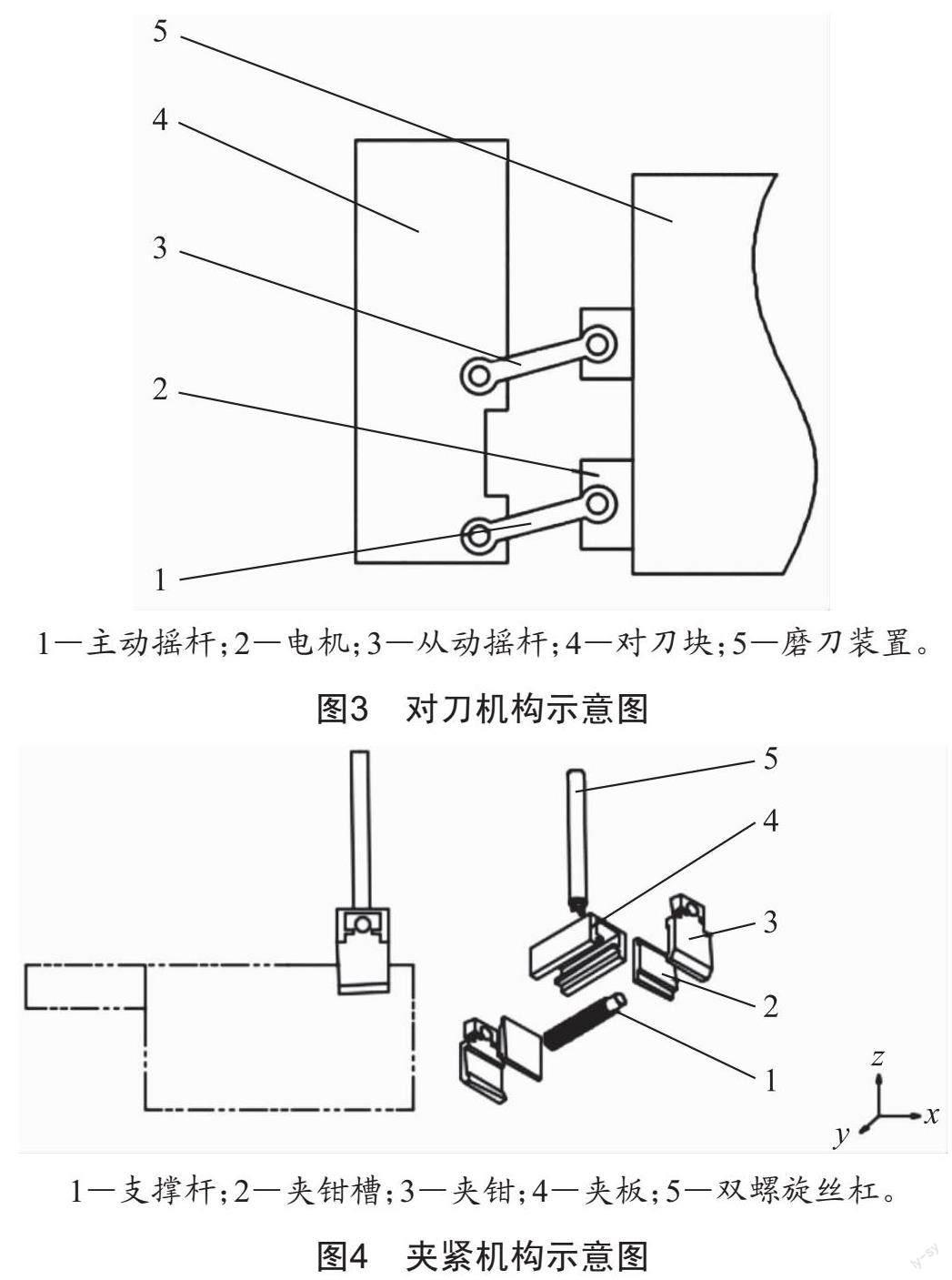
使用磨刀机磨刀时,由于不同菜刀的规格尺寸不一样,所以不同的菜刀需要定位后再进行磨刀操作,以防磨刀过程中由于菜刀位置改变影响磨刀效率和效果。为了解决这个问题,设计了一个对刀机构,通过对插入菜刀定位,使夹具将菜刀刀背夹紧,从而更好地对刀刃进行打磨。对刀机构的核心部件是由一个探测器(测头),一个高硬度、高耐磨的硬质合金带槽方体(对刀探针)和一个信号传输接口器组成(其他件略),探测器用来确定上升高度,防止上升过高[3]。如图3所示,在磨刀装置的前端设置有对刀装置,装置由主动摇杆、被动摇杆、电机和一个带槽的对刀块组成,通过电机的运动带动杆上下运动,到达上方固定位置且位置高于磨刀装置时停下,随后等待用户将刀放入装置内,当刀放入且被夹具夹紧后,控制器控制电机反向转动,杆向下运动,使对刀装置高度下降,避免菜刀与对刀块直接接触而损坏刀刃或造成对刀块的过度磨损,提高磨刀效率。
2.2 夹紧机构
夹紧机构由两部分组成,动力源(电机)和夹紧装置。如图4所示,当外电机正转时,与外电机相连的丝杠螺母进行正向转动,两旋向相反的夹紧块由于受丝杠螺母的螺旋作用沿导槽相向运动直到夹紧菜刀背部,停止移动。当打磨完成,需要取走菜刀时,外电机反转,与外电机相连的丝杠螺母反向转动,两旋向相反的夹紧块由于受丝杠螺母的螺旋作用沿导槽相背运动,从而松开菜刀。
在定位过程中,刀背两面的夹紧块限制了菜刀y轴的转动、z轴的转动和x方向的移动三个自由度,对刀机构的对刀块限制了菜刀x轴的转动和z方向的移动两个自由度,磨刀机的槽口限制了菜刀y方向的移动,如图4所示。菜刀在空间具有的六个自由度均被限制,符合工件定位的完全定位原则。
为保证菜刀在打磨过程中不会晃动,夹紧装置施加给菜刀的夹紧力要能克服菜刀的重力和磨刀过程中产生的摩檫力。打磨的菜刀普遍重量为m=300 g,在磨刀的过程中,磨刀块对菜刀产生的摩擦力f=10 N,取重力加速度g=9.8 m/s2,夹紧块与菜刀间的摩擦系数取μ=0.2。
计算夹紧力F:
要保证菜刀在打磨过程中不会晃动,夹紧装置施加给菜刀的夹紧力就要大于计算夹紧力F,本夹紧装置取1.2F作为实际夹紧力。
2.3 圆柱凸轮传动机构
圆柱凸轮传动机构是在一个圆柱面上开有曲线凹槽或在圆柱端面上做出曲线轮廓的构件,圆柱凸轮的传动平稳,能够实现长期高效的往复运动。若采用普通圆柱凸轮传动机构,则圆柱凸轮旋转一周,磨刀装置往复一次,会导致打磨不充分。考虑打磨充分且需直线往复运动的要求,本设计采用双螺旋线圆柱凸轮传动机构,磨刀装置往复一次需要圆柱凸轮轴旋转数周,这样传动更平稳,打磨更充分[4]。因设计需要完成轴向450 mm的位移,经讨论与分析,选取圆柱底面半径R为100 mm,故分析螺旋线的螺距为150 mm,所以为达到轴向位移要求,螺旋线理论上需要3圈。
凸轮尺寸如图5所示。
实际操作选用最难打磨的不锈钢材质的菜刀,根据大量数据采集,打磨不锈钢材质的菜刀时,菜刀与砂轮之间的力为25 N,到电机输出轴的力矩为10 N·m,选用两相混合式步进电机与圆柱凸轮传动机构连接,具体参数如表1所示。
此传动机构的传动效率计算公式:
式中:η为传动机构效率;T为传动机构阻力矩;n为传动机构軸转速;P为传动机构所需功率。
2.4 打磨抛光机构
如图6所示,当磨刀机对菜刀进行打磨时,电机5转动带动连杆2、4使两个磨刀石6沿着导槽向中间移动,直到接触菜刀电机停止转动。此时对菜刀进行打磨,程序设定打磨时间为8 min,达到设定时间打磨完成,当打磨完成后,电机反向转动,使两个打磨块松开菜刀。接着电机带动连杆使抛光石夹紧菜刀,进行抛光操作,程序设定的抛光时间为2 min,达到设定时间,抛光完成。整个过程持续10 min,完成对刀刃的打磨与抛光工作。
3 软件控制
本设计采用Wio Terminal开发板作为主控板,此开发板集成了麦克风、扬声器、microSD卡、光传感器、Wi-Fi等模块,兼容Arduino和Micro Python,便于开发。
Wio Terminal开发板载ATSAMD51P19微控制器,它的CPU速度为120~200 MHz,同时支持蓝牙和Wi-Fi,具备构建物联网项目的基础。开发板自身配备2.4英寸LED显示屏、3轴加速计、麦克风、蜂鸣器、microSD卡槽、光线传感器和红外发射器。
带动凸轮的电机选用直流减速电机,移动磨刀块和抛光块的电机选用丝杠步进电机。由于此设备功率较大,采用电源插头供电,设计220 V转24 V电路为电机供电,24 V转5 V为开发板以及各个模块供电[5]。
4 结语
菜刀在使用过程中变钝是一种不可避免的现象,而更换菜刀的成本相较于打磨菜刀的成本要高得多。因此,本文设计了一种便民的自助磨刀机。相较于传统的打磨方式,该自助磨刀机不仅操作简单,打磨效率高,而且可以解决菜刀打磨的临时性和急迫性问题,具有很好的应用前景。在实际应用过程中,该设计还存在着因不同材质的刀刃所需打磨时间不同,导致相同打磨时间对不同刀刃的打磨质量不同的问题,在将来的应用中,会对不同材质菜刀设置不同的打磨时间,来满足更多元化的磨刀需求。
[参考文献]
[1] 魏春梅,魏兵.机械设计基础[M].北京:人民邮电出版社,2016.
[2] 龚定安,陈孝昶,高化.机床夹具设计[M].西安:西安交通大学出版社,1992.
[3] 侍中楼,徐少震,杜雨桐,等.磨刀用刀具夹紧机构:CN216371694U[P].2022-04-26.
[4] 魏俊杰,朱家诚,杨徐,等.双螺旋线圆柱凸轮机构的设计与分析[J].机械设计与制造,2021(9):207-210.
[5] 朱双霞.机械设计[M].重庆:重庆大学出版社,2019.
收稿日期:2023-02-20
作者简介:侍中楼(1992—),男,江苏盐城人,硕士,实验师,研究方向:机电一体化。
