四种海况下船舶推进电机建模与仿真
2023-06-07李文正何治斌张洪富
李文正 何治斌 张洪富 林 杰
(大连海事大学 辽宁 大连 116026)
0 引 言
船舶在海洋中是否能够安全航行不仅受到船舶内部突发状况的影响,还会受到外部海况条件的干扰,特别是电力推进船舶,电力系统中任何设备的工况变化都有可能对船舶航行安全造成影响。推进电机作为电力推进船舶的动力设备,推进电机的工况变化更是决定船舶能否安全航行的关键。
很多学者主要是通过突加、突减电机负荷等人为因素研究推进电机以及整个电力推进船舶的影响,但这主要是船舶在航行过程中操作人员非正常操作产生的人为因素造成的影响;而非人为因素即船舶在航行中所受到风、浪、流等影响,螺旋桨负载转矩波动所造成的推进电机工况的变化目前研究相对较少。本文在文献[1]的基础上按照海况的定义考虑抗风稳性和船舶强度采取综合分类的方法将10种常见海况按照有效波高和峰值频率分为四类并将其作为推进电机的非人为扰动得到对船舶航行产生不同影响的四种海况,并以“沪东中华造船有限公司的中能LNG (CESI GLADSTONE)”作为母型船,搭建四种海况下船舶推进电机的仿真模型。将平静海况下的仿真结果与说明书上的实船数据进行对比验证,并根据验证结果来分析极端海况和两种混合海况下船舶推进电机的仿真效果。
1 四种海况下的船舶运动模型
1.1 船舶运动模型
根据MMG数学模型,考虑船舶在航行过程中所受到非人为因素如风、浪、流的影响,建立前进、横移、艏摇三自由度船舶操纵性运动模型[2-3],如式(1)所示。
(1)
船舶动力学模型如式(2)所示。
(2)
式中:m表示船体的质量;x、y、ψ表示船舶前进、横移和转艏三自由度的位移;u、v、r表示船舶三自由度的速度;X、Y、N表示船舶三自由度的力和力矩,下标T、W、E分别表示所受推进器产生的推力,船体水动力和风、浪、流等海洋环境干扰力。
结合式(1)-式(2),在MATLAB/Simlink下搭建船舶运动模型。
1.2 海洋环境干扰力模型
1.2.1风扰动模型
对于各类海洋环境扰动的风扰动,常将其分为绝对风和相对风。绝对风[3]是在惯性坐标系下风扰动的方式;相对风[4]是在船体坐标系下风扰动的方式。绝对风和相对风之间的转化关系,见图1。

图1 绝对风与相对风示意图
由图1可知将绝对风和相对风在船体坐标下投影到x、y轴,得到相对风速的计算公式,如式(3)所示。
(3)
式中:UT表示绝对风;αT为绝对风向角;UR为相对风;αR为相对风向角也叫风舷角;uR、vR是相对风在船体坐标系下的x坐标和y坐标的两个分量。
相对风向角αR的计算过程如式(4)所示。
(4)
风扰动作用于船舶水平面三自由度的力和力矩可以用φwind=[XwindYwindNwind],平均风扰动在船舶航行中的数学模型可近似表示为[5]:
(5)
式中:ρa是空气密度;AFw、ALw表示船体水线面上的正投影面积和侧投影面积。
计算风扰动主要计算风压力系数,根据船体的几何形状的不同,当前确定风压力系数的方法主要有两种[1]:风洞实验法和数值计算法。文中采用Blendermann经验公式计算CX(αR)、CY(αR)、CN(αR)三个风压力系数,如式(6)所示[1]。
(6)

在式(6)中,针对不同类型的船舶,各种相关参数值[5]见表1。

表1 横向和纵向阻力系数、横向力系数及横摇力矩系数
根据式(3)-式(6)并结合表1中“Liquefied natural gas tanker”的数据,在MATLAB仿真软件的Simulink环境下搭建风扰动的仿真模块。
1.2.2浪扰动模型
波浪力分为一阶波浪力和二阶波浪力,其中二阶波浪力对船舶运动状态产生巨大影响,本文针对低频二阶干扰力进行研究[4]。在建立浪扰动模型时需要用到波浪谱S(ω)来计算波浪的幅值。其波浪谱(能量谱)的公式为[5]:
(7)
式中:Ak为波幅;ωk为第k次的波浪频率。
将10种海况等级按照有效波高和波浪频率得到四种不同海况,见表2,并根据四种海况等级选用适合的波浪谱拟合函数,作为仿真过程中浪扰动的波浪谱的传递函数,其形式如表3所示[4]。

表2 四种海况下的波浪参数

表3 四种海况下波浪谱的拟合函数
船舶的二阶波浪扰动可由Diadola的二阶波浪力和力矩的近似计算公式[4],如式(8)所示。
(8)
式中:ρ为海水的密度;g为重力加速度;ζ为波浪幅值的平均值;μ为波浪方向角;λ=2πω2/g为波长。
波浪漂移力和力矩系数CX(λ)、CY(λ)、CN(λ)的计算公式[7-9]如式(9)所示。

(9)
根据式(7)-式(9)并结合表3中“四种海况下波浪谱拟合函数”的数据在MATLAB仿真软件的Simulink环境下搭建二阶浪扰动模型。
1.2.3流扰动数学模型
流扰动是指在航行中海水的流动对船舶产生的影响。一般流扰动的建模方法主要分为两类[3]:一类是将海流对船舶运动的影响简化为船舶速度的变化;另一类是在搭建船舶动力学模型中将海流视为影响船舶运动的扰动力。为了方便计算,本文在研究过程中使用第一种方法——速度向量合成方法。它的原理是船舶相对海流的速度和船舶船速之间的转化,如式(10)所示。
(10)
式中:Vc为外界海水的流速;ψc为惯性坐标系下海流的流向角;uc、vc是海流施加在船舶运动的速度。
根据式(10),在MATLAB的Simulink环境中建立流扰动的仿真模型。
2 电力推进船舶的船机桨模型
2.1 推进电机模型
异步电动机由于构造简单、运行可靠、维护方便及价格低廉等优点作为主要的动力设备广泛应用于船舶燃油、滑油、冷却、压缩空气、海水、低温淡水和高温淡水等系统[10-11]。近年来,随着电力电子器件的发展和变频调速技术的进步,电力推进系统也使用异步电机作为船舶的推进设备为船舶航行提供动力,保证船舶的正常航行[11]。本文采用大容量的鼠笼式异步电机作为研究对象,搭建推进电机的数学模型。
为了简化分析,通常将异步电机从三相静止坐标系进行变换,见图2和图3。将电机置于dq坐标系,得到dq坐标下异步推进电机的数学模型[12]。
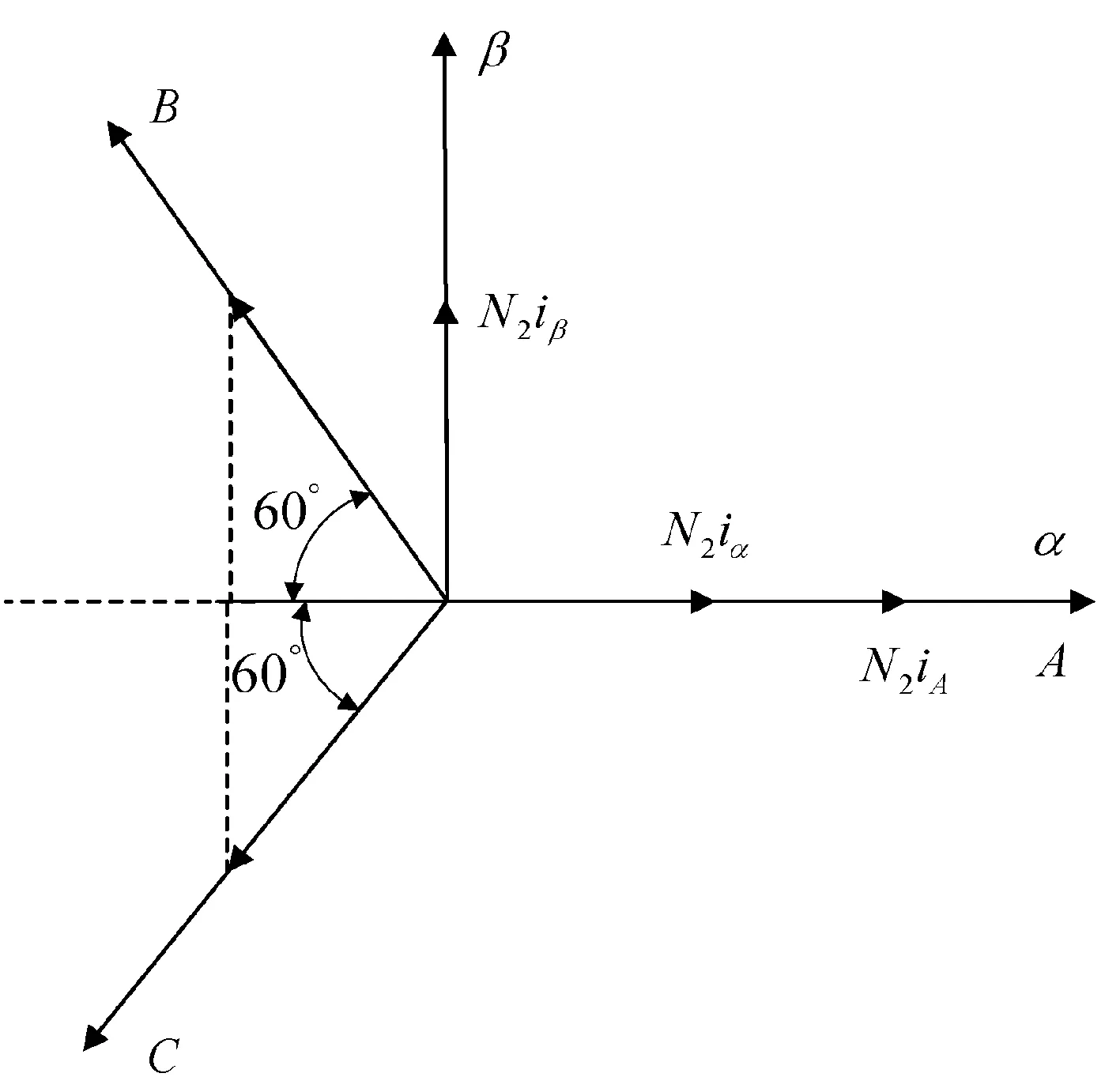
(a)

(b)图2 三相坐标变换
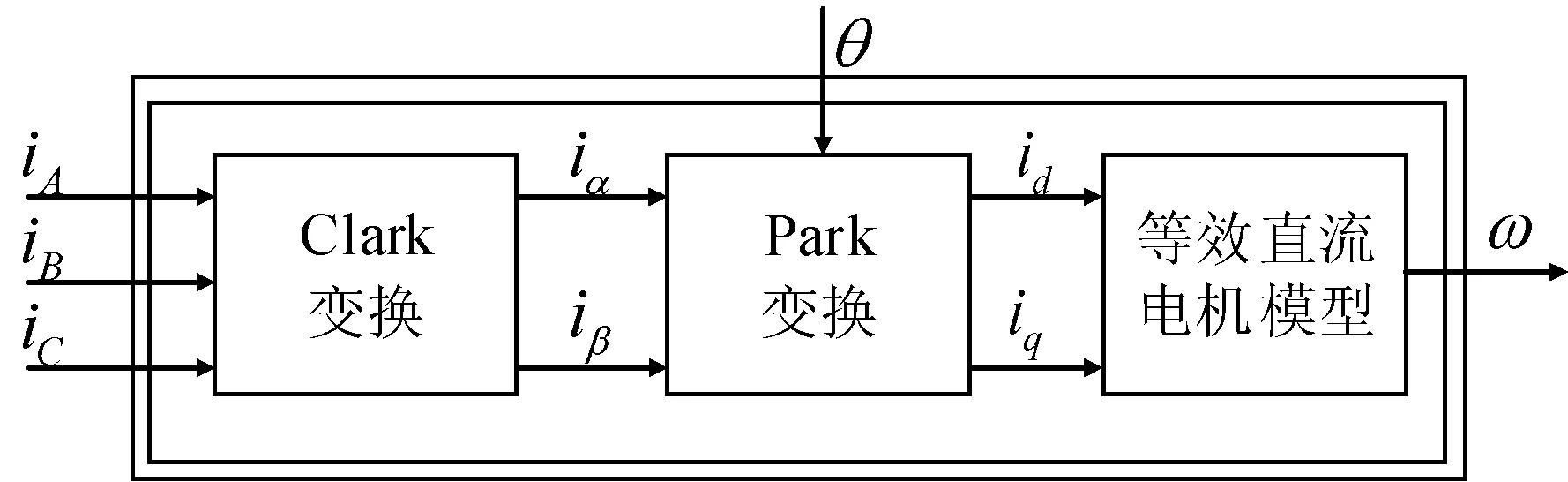
图3 异步电机坐标变换示意图
2.1.1电压方程
鼠笼式异步电动机[13-14]在建模过程中由于转子短路,在dq同步旋转坐标系下简化的电压方程为:
(11)
2.1.2磁链方程
(12)
2.1.3转矩和运动方程
在dq坐标下异步电机的电磁转矩的几种表达形式和运动方程如下:
(13)
结合式(11)-式(13)在MATLAB的Simulink环境下搭建推进电机的电流滞环控制PWM的仿真模块,见图4。

图4 电流滞环控制的推进电机模型
2.2 船桨模型
当螺旋桨的转速n≠0且螺旋桨的进速VP≠0时,在定常状态下螺旋桨的推力P、修正的进速比J和转矩M可表示为[14]:
(14)
式中:D为螺旋桨直径。
通过实船实验得到螺旋桨推力系数KP和扭矩系数KM进速比J淌水特性曲线,其具体数值见表4。

表4 修正的淌水实验特征值

续表4
结合式(14)和表4的淌水特性实验特征值在Simulink环境下建立螺旋桨仿真模块,见图5。

图5 船舶螺旋桨模型
3 仿真结果与分析
本文以沪东中华造船有限公司旗下的“中能LNG”为母型船,在采用MATLAB仿真软件在Simulink环境下对搭建四种海况下船舶推进电机综合模型。表5-表7为“中能LNG”船舶的主要参数。

表5 LNG船体的主要参数

表6 螺旋桨参数

表7 推进电机的主要参数
根据前两节所述的建模方法结合中能LNG“CESI GLADSTONE”船舶主要参数,搭建四种海况下船舶运动的推进电机仿真模型如图6所示。

图6 四种海况下船舶推进电机综合模型
仿真过程:当风向角αR、波浪遭遇角β与船舶前进方向相反时,空载启动异步推进电机,设定转速为650r/min;延迟1 s后推进电机经减速齿轮箱带动螺旋桨,通过船舶漂移角产生的推力与风、浪扰动模型产生的推力和转艏矩矢量相加结合船舶运动模型产生船速和位移,通过螺旋桨转矩和船速的反馈调节,对整个系统进行仿真。
3.1 平静海况下的推进电机仿真
图7分别为平静海况下的浪扰动曲线、转速曲线和船速与轴功率曲线。由仿真曲线可知:在仿真过程中系统经过25 s后达到650r/min稳定状态,船舶船速和螺旋桨的轴功率曲线与中能LNG“CESI GLADSTONE”说明书上平静海况下船速和轴功率曲线相比虽然有些误差但基本一致,整个仿真过程实现了在风、浪、流扰动下船舶前进过程中推进电机的MATLAB/Simulink仿真。
(a)

(b)

(c)图7 平静海况下推进电机仿真曲线
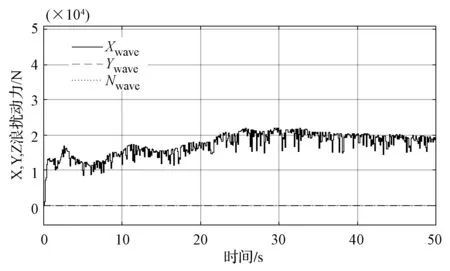
3.2 极端海况下的推进电机仿真
分析图8的仿真波形,在仿真过程中系统第一秒推进电机转速提升迅速,当带动螺旋桨负载后转速上升速率减慢经过30 s后达到495 r/min稳定状态,通过对比平静海况下的浪扰动波形图和船速轴功率曲线分析可知:在极端海况下,在设定航速时不变时由于浪扰动的作用船舶增加了约4×104N的推力,推进电机所需承担推力相应减少,电机转速对应减少在495 r/min达到稳定状态。

(a)

(b)

(c)图8 极端海况下的推进电机仿真曲线
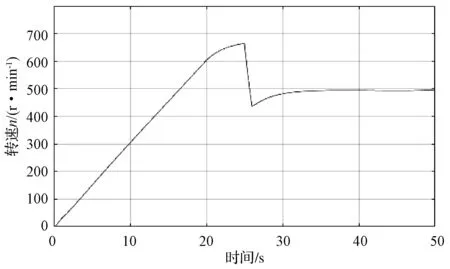
3.3 两种混合海况下的推进电机仿真
分析图9的仿真波形,在仿真过程中系统前25 s船舶在平静海况下运行,推进电机转速达到650 r/min,改变浪扰动条件,船舶在极端海况下继续航行,推进电机转速从650 r/min极速下降,通过PI控制作用26.4 s后转速逐渐上升,由于设定航速保持不变推进电机所需推力减少,轴功率也相应减小,在35 s后电机达到495 r/min保持稳定。通过对比三种海况下船速轴功率仿真曲线可知不同仿真情况下船速轴功率增长趋势基本一致。结合3.1节中得出的平静海况下模型仿真有效性可以说明极端海况和混合海况条件下推进电机的仿真验证是有效的。

(a)
(b)

(c)图9 混合海况下的推进电机仿真曲线
4 结 语
本文结合推进电机与复杂海况下的船舶运动过程搭建四种海况下的船舶推进电机建模仿真,并选取平静海况和极端海况两种条件下波浪遭遇角与船舶前进方向一致时进行仿真验证。仿真结果表明:所搭建的船舶推进电机仿真模型能够真实地反映船舶在海上航行时推进电机受到的影响,同时也可以证明将风、浪、流等复杂海况模型引入船舶推进电机的建模过程是可行的;为实验室基金项目“智能船舶综合测试与验证研究”等做出贡献;为以后船舶在复杂海况的研究提供了一种建模仿真方法;提高了计算机在电力推进船舶仿真的范围和可靠性,降低了船舶在实船检验时的成本和潜在的风险。