基于神经网络PID 的多支路流量远程控制仿真*
2023-06-04李泽东孟祥印周亮君
李泽东 孟祥印 彭 杰 周亮君
(西南交通大学机械工程学院 成都 610031)
1 引言
多支路流量控制经常运用在我们的日常生活和工业生产各个角落,如天然气输配、多支路调压站等。众所周知,气体输送系统是由多个支路同时配送,并且系统是一个相互联系的整体,各个支路之间会相互影响,既某个支路的流量变化,势必引起其它支路流量变化,支路与支路之间存在耦合关系[1]。如何控制支路变化,让支路流量按照预定的输送变得格外重。相反,如果无法准确控制各支路流量的变化,可能产生不堪设想的后果。例如,如果某个支路的流量过大,可能会造成超出其支路设备的最大限值而导致损坏,使整个系统不能正常运行,既所谓的失调[2~3]。如果系统失调长期存在,导致流体输送系统的部分支路设备高负荷运行,而另一支路设备却较低负荷工作,使得系统的整体使用寿命缩短。
针对系统中存在的这种流量失调现象,以及使得各支路能够按照设定的流量进行控制,应当采用相应的措施,对管网进行平衡调节,尽量减少失调的程度,保证多支路气体输配系统的长期可靠安全运行[4~6]。并且随着网络技术的发展,远程调流成为气体输送控制和输配调度的重要技术手段,迫切需要提高系统参数调节的自动化、网络化和智能化。在流量相互作用的多支路气体输配系统中,研究如何远程控制压力、调节和平衡支路间流量,并能自辨识、自适应不同参数的系统,具有一定的理论意义和重要的市场应用价值。
2 多支路流量调节模型
2.1 系统总体设计方案
在多支路系统中,由于各支路之间存在耦合关系,某个支路流量变化必然影响其他路流量变化,并且这些变化都是非线性的,因此,如果仅仅通过分别单独对每个支路调节不但费时费力,并且很难精准控制各支路流量。本文通过神经网络PID 同时控制多条支路,使流量得到精确控制。本文以三条支路为例,系统整体布局如图1。

图1 多支路流量控制整体布局图
如图1 所示,在整个多支路流量控制系统中,每条支路有相应的调节阀、流量传感器、控制器、执行装置等。流量传感器实时监测各支路流量,控制器根据控制信号控制执行装置,进而控制阀门的开度,最终实现流量的控制。
系统主要由远程控制中心和调节阀终端组成,调节阀终端主要有微处理器、步进电机控制模块、流量采集模块、数据通信模块。远程控制中心主要包括数据通信模块,服务平台、用户端等[7]。调压阀终端通过Internet将流量数据传送给远程控制中心,远程控制中心发送信号来控制阀门开度进而控制流量大小[8]。
2.2 调节阀阀门开度控制
调节阀控制系统主要由控制器、步进电机、蜗轮蜗杆传动机构、调节阀构成[9]。具体控制过程为控制器根据设置流量和流量传感器检测实际流量对比,根据调压算法进行运算,形成相应的控制信号,控制步进电机转动,蜗轮蜗杆将步进电机的转动变成丝杠的直线运动,进而控制调节阀门的开度,最后将控制所得流量反馈比较,形成闭环控制。控制原理,如图3。

图3 电动燃气调节阀系统控制原理
2.3 调节阀系统数学模型建立
为了更好地分析调节阀的控制系统的响应,需要对调节阀控制系统进行数学建模,通过参考文献[10]对步进电机、传动系统(电机轴,减速器,丝杠轴,传感器)、调节阀建模。得到了被控系统传递函数近似如下:
主要参数如表1所示[10]。

表1 调节阀系统模型参数[10]
3 多输入多输出神经网络PID解耦
在大多数多输入多输出(MIMO)的系统中,都存在耦合现象,然而,在工业控制中希望各个支路之间耦合尽量削弱甚至消除,才能使系统安全平稳的运行。传统的解耦控制器可以在一定程度上实现解耦,但解耦控制器的设计繁杂,计算量大。因此,本文以神经网络为基础,实现对多输入多输出系统的解耦控制[11~12]。
3.1 单输出神经网络PID
本文多输入多输出系统以三条支路并联构成,是一个6 输入3 输出的多变量耦合系统,控制器是由3 个单输出PID 神经网络(SPIDNN)构成的多输出PID 神经网络(MPIDNN),单输出PID 神经网络(SPIDNN)输入是由两个神经元构成,对应系统分别是某支路的设定流量和流量传感器检测的实际流量,隐含层分别由比例(P)、积分(I)、微分(D)3个神经元构成,输出层只有一个神经元,输出控制信号[13],控制电机的转动。结构如图4。

图4 SPIDNN机构图
3.2 多输出神经网络PID解耦
多输出PID 神经网络解耦控制器是有多个SPIDNN并联而成,输入层到隐含层独立运算,但隐含层到输出层互相交叉关联,通过对隐含层的神经元定义不同的激活函数,使得比例、积分、微分之间有相应的关系[14]。根据误差函数,通过正向计算和反向计算,不断地训练学习,修改完善连接权值,使得流量得到控制[15],结构如图5。
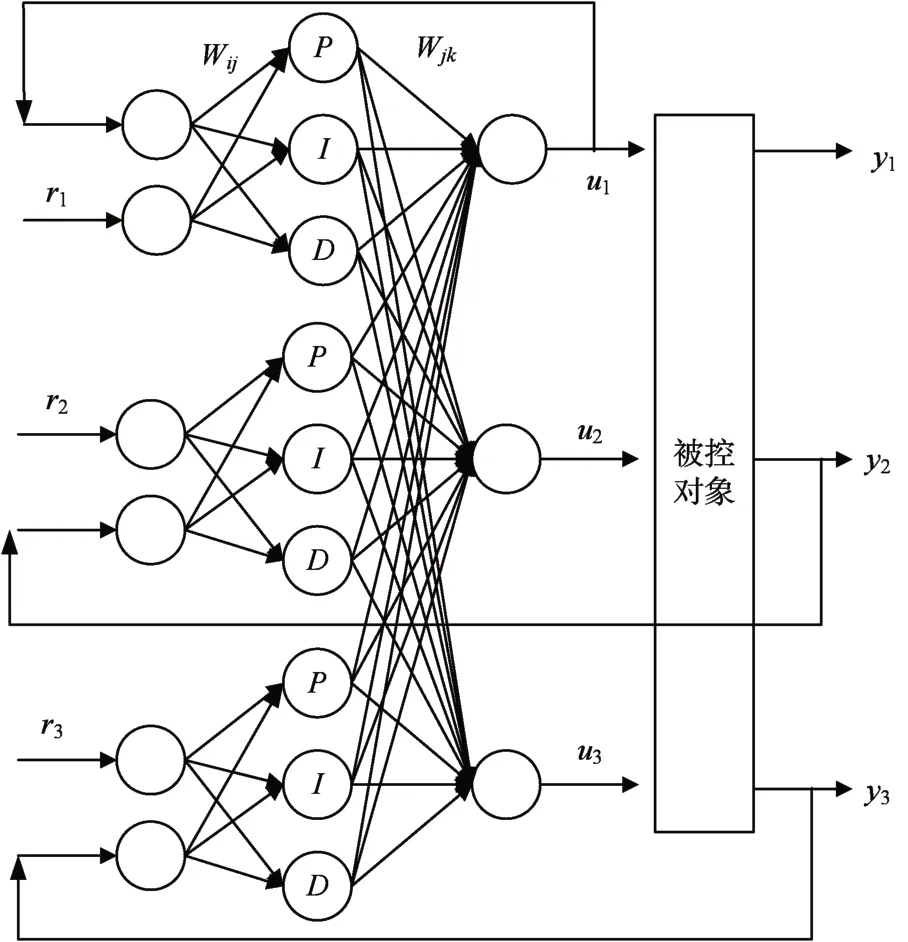
图5 MPIDNN机构图
3.3 PID神经网络多变量解耦控制算法
输入层:
输入层包含有6 个神经元,输出神经元的数据等于输入的神经元数据,关系如下:
式中:m为并联网络序号;γm(k) 为设定流量值;ym(k)为流量监测值;μmi为输入层神经元输出值。
隐藏层:
隐藏层有9个神经元,比例、积分、微分各3个,各个神经元的输入值可以表示为
比例神经元:
积分神经元:
微分神经元:
式中,j 为子网络中隐含层神经元序号;χmi(k)为各子网络输出层神经元输出值;ωij为各子网络输出层到隐藏层的连接权重。
输出层:
输出层有三个神经元,分别控制三个调压阀的电机转动,计算公式如下:
式中,h表示输出层神经元序号,μmj(k)为隐藏层各神经元输出值,ωjk为隐藏层到输出层的连接权值。
连接权值修正:
神经网络PID 通过控制误差来反向运算调整连接权重,使误差函数逐步减小,误差函数为
权重修正:
输出到隐藏层:
隐藏层到输出层:
η为学习率。
4 多支路流量调节模拟仿真
通过将表1 的数值带入式(1),采样时间设置为0.01s时候,经过z变换得到的传递函数为
由z 变换可以求得系统的差分方程表达式如下:
设三条支路的传递函数差分方程分别为Y1(k)、Y2(k)、Y3(k),为了简化方程,将上述方程用以下参数代替:
由于三条支路之间存在耦合,并且耦合作用与管路系统、调节系统有关。因此,本文采用以下近似耦合关系进行仿真:
根据神经网络学习速率选取规则,取η=0.06。初始权值为随机数,三个被控量的目标值设置为0.7、0.65、0.6,循环次数设置为200,仿真图像如图6~7所示。

图6 多支路流量控制控制阶跃响应图

图7 多支路流量控制误差图
从图6~7 可知,三条支路在大约0.2s 后趋于稳定,并且各个支路实际输出和控制目标有之间有一定的误差,系统整体误差在0.0061左右。
针对以上存在的反应速度慢,神经网络容易陷入局部最优造成的实际输出与控制目标误差较大的问题。在以上基础上加入动量项以及神经元系数如下。
增加动量项:
增加神经元系数:
其中η1=0.001,kp=1.5、ki=1、kd=10、其他参数不变,所得的仿真图如图8~9所示。

图8 改进后多支路流量控制控制阶跃相应图
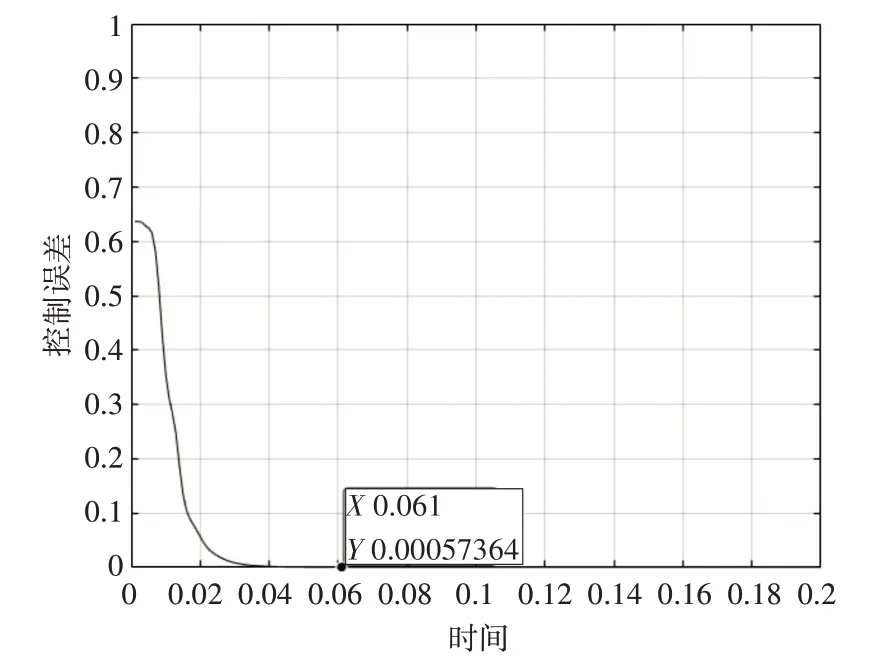
图9 改进后多支路流量控制控制误差图
从仿真图可以看出,三个控制量在0.06s 左右全部趋于稳定,整体误差控制在0.0005,相对于改进前,在速度、误差、稳定性方面都有大幅度提升。并且实验表明,PID 神经网络能够解决各支路的耦合关系,并且快速地调节各支路流量。
5 结语
本文通过建立系统传递函数,使用改进后的神经网络PID 完成了对具有耦合作用的多支路流量控制,实现了快速、准确地控制各支路流量大小,为多支路流量输送控制提供了一定的参考。
