液压推杆中软限位的应用
2023-06-01熊健
熊健
(天山钢铁巴州有限公司烧结厂,新疆 巴音郭楞蒙古自治州 841000)
1 研究背景
液压推杆因其动作的精确性,所以在日常生产中常用做仓门、插板等控制,控制运用中必然用到各种限位,机械限位或者电感限位,来作为连锁控制信号。在本地操作时,往往由于大多为可视化操作,故障较少,但对于远程操作来说,看不到现场情况,无法了解设备状态,就必定要依赖各种可靠的限位连锁信号来实现控制。而在现实生产中,往往由于限位本身质量问题,或者现场振动、固定不牢、触点不动作、机械碰伤等原因,造成限位不起作用,从而达不到控制要求,有时甚至发生烧毁电机、机械故障等事故,造成一定损失。为减少和避免这样的情况发生,采用了程序中的软限位,代替现实物理限位,大大减少了限位故障。本应用是远程操作,所以对于本地操作不做相关论述。
2 程序编写和画面说明
以西门子PLC300[1]和WinCC[2]操作画面为例,并以阀门操作来说明,简略操作画面如图1 所示。
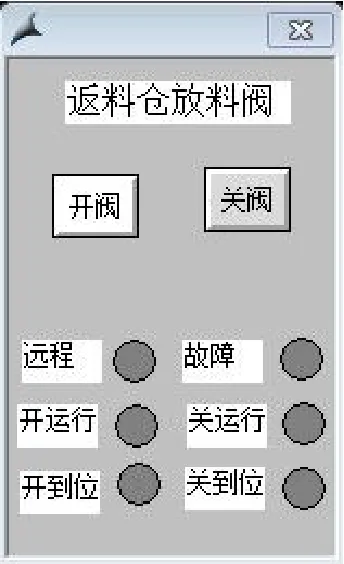
图1 阀门操作简略画面
从图1 操作画面上可以清晰了解阀门的状态,其中的开到位和关到位信号就是软限位。在远程操作中,为实现这2 个限位的展示,采用简便的梯形图[3],以开和关来表示液压推杆的正反动作,简略程序如图2、图3、图4 所示。

图2 程序段1
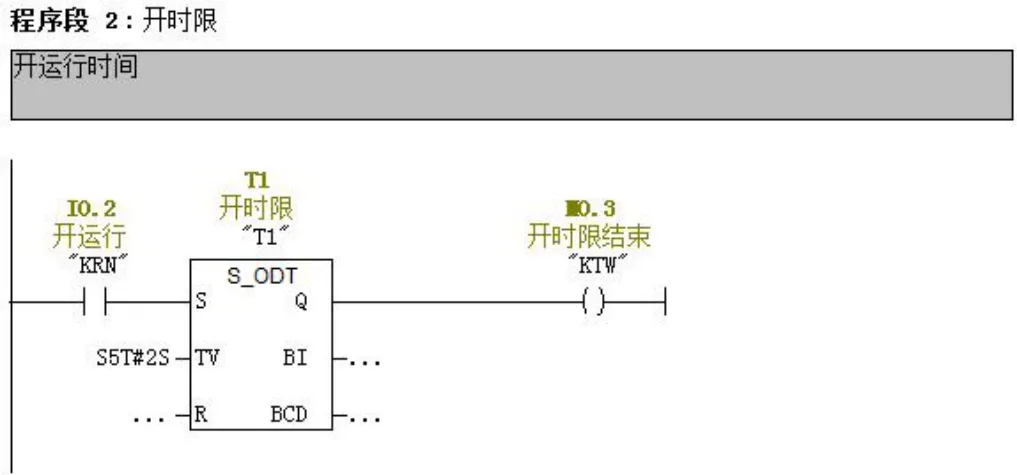
图3 程序段2
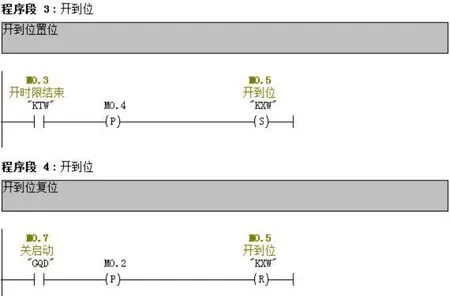
图4 程序段3 与程序段4
图2、图3 为开操作的编程[4],图2、图3 中,当远程状态时,点按M0.1,Q0.0 输出动作,当Q0.0 输出时,则I0.2 为1 开始计时,T1 计时结束时导通M0.3;图4 中,M0.3 为1 时Q0.0 结束输出,同时M0.5 置位,M0.5 就是开到位的信号,当点动M0.7,关操作时,M0.5 复位。之所以设置M0.5,是便于在操作画出上显示开到位信号,使相关人员了解现在推杆状态,具体画面设计根据实际情况,但大都包含图1 中的几个信号,即要有远程信号、故障信号、运行信号、开到位信号、关到位信号。示例中此时操作画面如图5 所示。
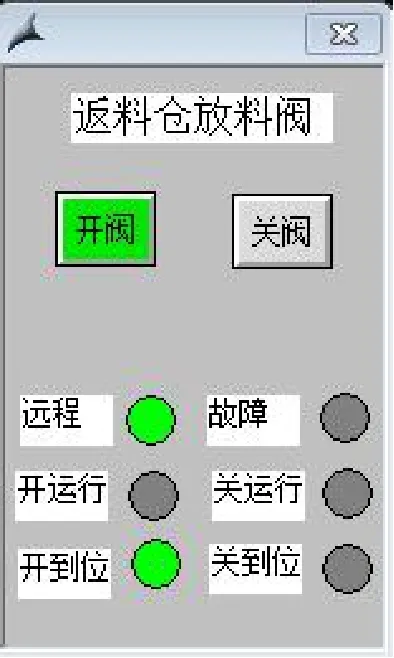
图5 推杆状态操作画面1
图5 中的画面,显示了远程信号和开到位信号,均变成绿色,实时反映阀门的开阀状态,当要关阀时,点按关阀按钮,反向运动指令发出时,开到位信号失去。
关操作的编程具体如图6、图7、图8 所示。

图6 程序段5
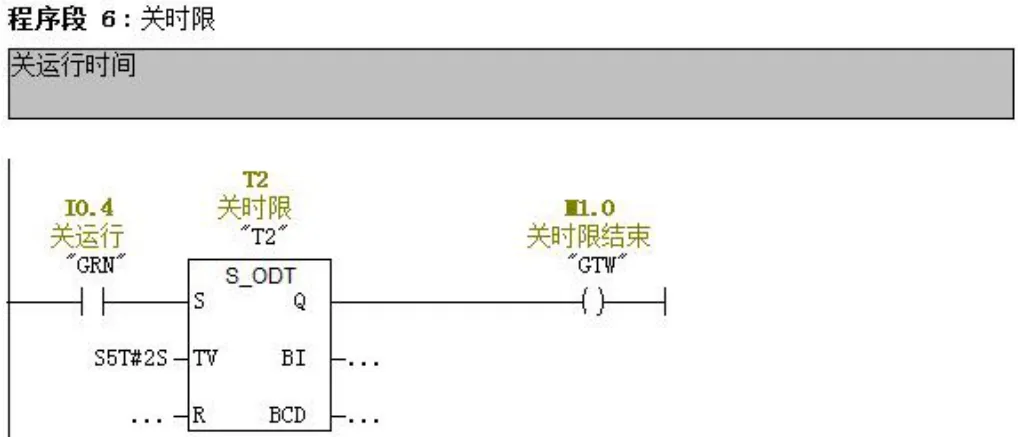
图7 程序段6
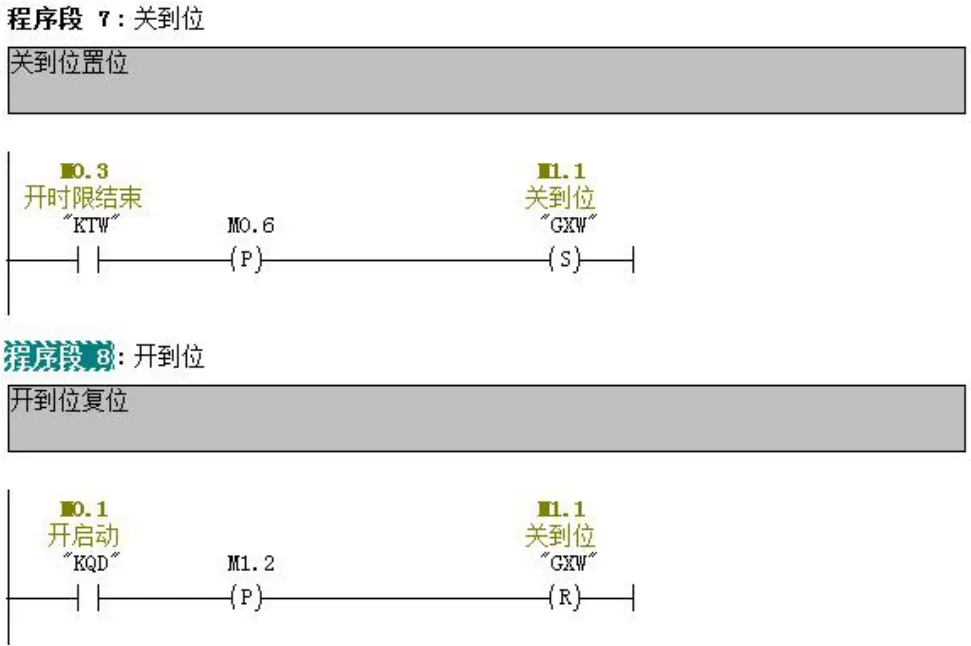
图8 程序段7 与程序段8
图6、图7 为关操作编程[1],图6、图7 中,当远程状态时,点按M0.7,Q0.1 输出动作,当Q0.1 输出时,I0.4 作为运行信号,其为1 时T2 开始计时,T2计时结束时导通M1.0;图8 中,M1.0 为1 时Q0.1 结束输出,同时M1.1 置位,M1.1 就是关到位的信号,当点M0.1 开操作时,M1.1 复位。设置M1.1,是便于在操作画出上显示关到位信号,使相关人员了解现在推杆状态。示例中此时操作画面如图9 所示。

图9 推杆状态操作画面2
图9 中的画面,此时应显示远程信号和关到位信号,均变成绿色,反映阀门关阀状态,如要开阀,当点按开阀按钮,反向运动指令发出时,关到位信号失去。
3 现场调试
实际工作中,以阀门关状态为标准位。当接线完毕后,首先确认液压推杆无泄漏,油缸加足液油,油压状态正常;其次送电,送电后先试本地操作,本地操作开阀和关阀均正常后,将其转到远程操作,点动远程,看远程和本地动作方向是否一致,方向一致后,转至本地操作,本地操作将推杆关阀到位,到达标准位后,开始远程调试。
本地与远程动作方向调试完毕后,将操作改到远程状态,然后在程序中设定T1、T2 的时限,时限以PLC 扫描周期[5]为准,通常以100 ms 为单位,即增加时限以100 ms 的整数倍增加,先以较短的时间开始调试,慢慢增加T1、T2 的数值,直到开阀关阀满足现实生产要求,在操作画面中清晰显示所有信号,并且软限位信号正常,调试结束。
在实际生产运用中,如果在工作现场添加视频监控,则可以进一步方便于远程操作人员进行操作。日常工作中要定期检查液压推杆的油压,有无泄漏,保证其在正常工作状态。
4 故障和不足
在本应用事例中,不足之处在于调试时比较繁杂,另外日常故障主要有4 种情况:①PLC 断电。在断电的情冲下,PLC 信号丢失,阀门状态在操作画面上就没有了,当恢复供电时,要将液压推杆转换到现场操作并恢复到关阀的标准位,然后打到远程,开始开阀操作,远程操作画面阀门状态就有了,并与现场相一致。②PLC 本身故障。PLC 本身故障也会导致阀门状态丢失,当故障排除,PLC 正常后,仍然现场操作,恢复到标准位,远程做相应的开阀操作,恢复阀门状态信号。③液压推杆故障。液压推杆本身故障会导致操作达不到生产要求,要定期检查液压推杆有无泄漏,液压是否正常,阀门是否开到位或关到位等,实际生产中,在液压推杆重新加油后,动作可能会有偏差,这时就需要重新调整动作时限以达到生产要求。④电机过载故障。电机在动作过程中产生过载跳闸后,这时远程已不能进行操作,操作画面会显示故障信号,由于程序没有执行完毕,同时软限位信号也就没有显示了,这种情况下,在排除电机故障后,仍然现场操作恢复阀门标准位,远程做相应的开阀操作,恢复阀门状态信号。
5 结束语
通过PLC 编程,设置软限位,远程操作液压推杆,运行平稳,避免了物理限位的故障。在推广上,可以试着用于往复运动的场合,编程上可能更复杂。不足之处有2 点:①在于现场调试时,运行时限的确定要从短到长,多次调试加以确定,比较麻烦;②当发生故障时,主要有4 种情况,分别是PLC 断电、PLC 本身故障、液压推杆本身故障和电机过载跳停,则需要打到本地操作,将推杆回到关到位的标准位,然后才可以远程操作,这种情况一般较少。
