基于角动量守恒的位姿平衡系统设计*
2023-06-01刘江昊杜艳红董禹呈
刘江昊,杜艳红,董禹呈
(天津农学院工程技术学院,天津 300384)
目前,随着计算机技术、集成电路和通讯技术的飞速发展,被动稳定逐步发展为半主动控制,以增加稳定性、提高姿态精度、调节指向等为目标[1]。动量轮实现的姿态控制方法称为自旋稳定,具有原理简单、效果好、成本低等优点,被广泛应用于人造卫星和航天飞机的姿态调整,大大提高了飞行器的发射成功率,减轻了研究人员的负担,提高了系统的稳定性。
1 设计原理
设计三维空间上控制角动量保持平衡时,以A 电机为例,通过控制A 电机带动飞轮左右旋转产生加速度来控制平衡[2],如图1 所示。

图1 电机定义
三维空间上控制角动量保持平衡时,需调用A、B、C 这3 路电机,如图2 所示。其中A 电机控制Y轴平衡,B、C 电机控制X轴平衡,A、B、C 这3 个电机共同控制Z轴旋转,原理仍为角动量平衡,仅增加了2 个轴的控制,其中A 电机控制Y轴,即左右倾斜,B、C 电机合力控制X轴,即前后倾斜,3 个电机又额外控制Z轴旋转。

图2 三维空间定义
在不考虑系统冗余度的情况下,本次设计采用3个正交安装的动量轮,与机体X、Y、Z这3 个轴平行,正常状态为3 个正交安装的反作用轮工作[3]。
2 平衡系统设计
2.1 系统结构
基于苏黎世联邦理工学院所研发的Cubli 方形机器人的机械结构设计了以STM32 单片机作为核心处理器的平衡系统,主要包括电源电路、电机控制电路、无刷电机、动量轮,如图3 所示。电源电路采用AMS1117 芯片和LM2596 芯片;角动量平衡系统则采用Nidec 生产的功率较大且自带电机驱动的24H404H无刷电机;动量轮结构为合金制的轮形结构,在确保能够提供足够大的动量基础上整机结构不会过于沉重。
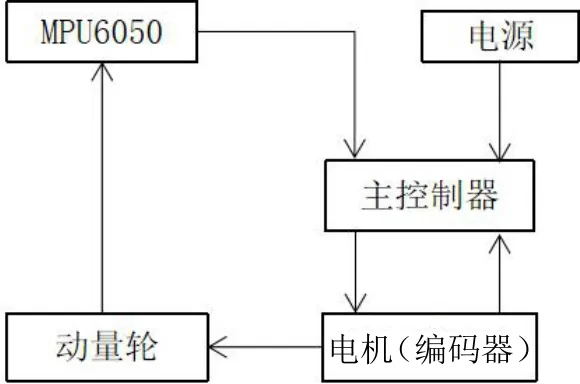
图3 系统结构图
2.2 位姿信息采集
设计主要使用MPU6050 传感器来获得动量轮在XYZ平面内的位姿信息,通过IIC(Inter-Integrated Circuit)接口向主控器输出姿态数据,并将传感器直接与MPU6050 挂载在同一条总线上,使用主机直接进行控制。
2.3 平衡控制
本设计采用的电机自带电机驱动,因此只需控制器输出PWM(Pulse Width Modulation)信号控制即可,由于转子后端具有光栅传感器,因此控制器也可实时获得电机的运行状态并根据状态进行控制。在获得光栅传感器所捕获的电机运行数据后,经过一次低通滤波得到的电机数据传递给主控并参与电机控制的解算。电机控制算法主要利用了PID(Proportion Integration Differentiation)控制进行调节,其控制方案如图4 所示。
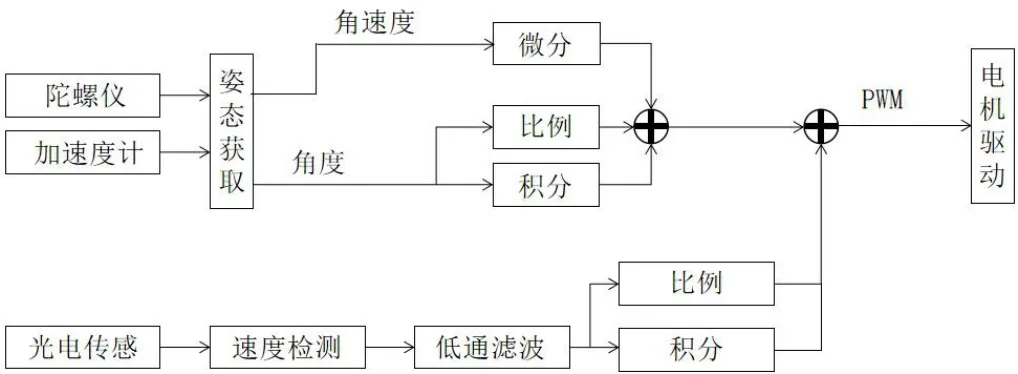
图4 控制方案
3 软件流程
首先进行系统初始化,系统控制器依据传感器采集到的数据对系统进行实时控制,主要包括电机的速度控制、位姿控制和电流控制,进而调节系统的姿态使它达到动态平衡[4],总体流程如图5 所示。

图5 软件流程图
4 样机制作及测试
采用了集成化的设计,将控制电路及电源电路整合,本机本体即为电路主体。样机主要由3 部分组成,前板为主控单元电路、MPU6050 传感器和电源电路,中层为连接电机和动量轮的电机输出接口,控制电机为整机提供动力力矩,背板连接电池组,为整机提供电源支持。3 部分由M3 铜柱连接,以此保证样机结构的强度。位姿平衡装置结构如图6 所示。

图6 位姿平衡装置结构图
在样机平衡时测得控制曲线如图7 所示,可见系统达到位姿平衡,满足设计要求。
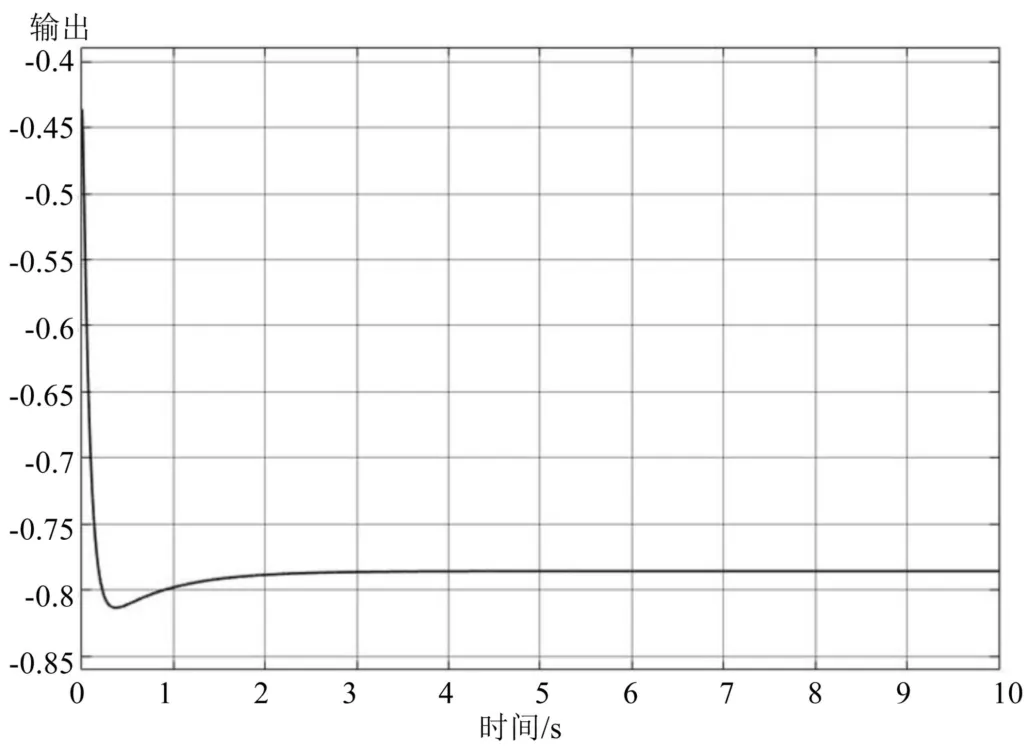
图7 样机PID 控制曲线
在样机平衡时对它进行扰动实验,角度动量轮在XYZ平面输出曲线,如图8—图10 所示。
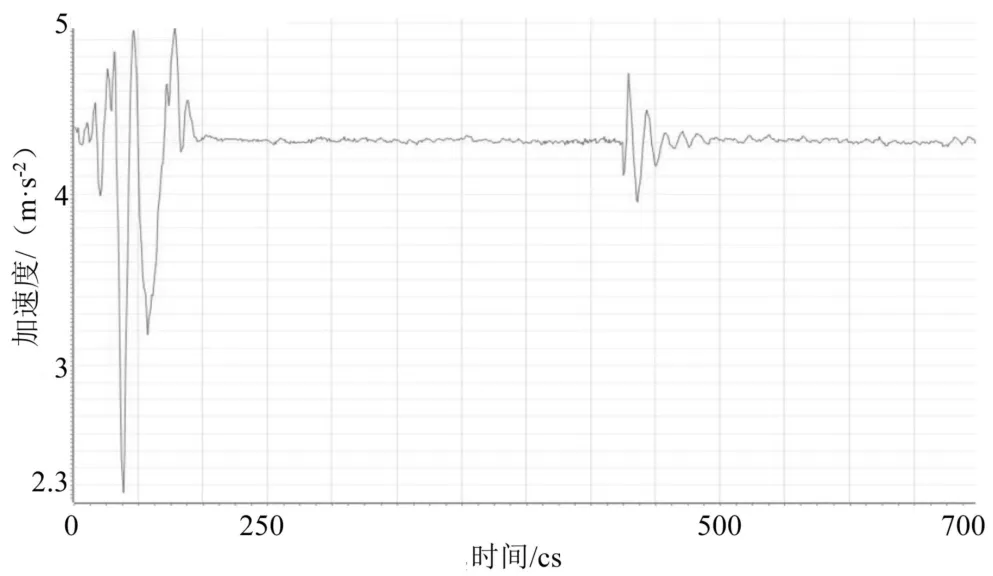
图8 X 轴动量轮输出曲线
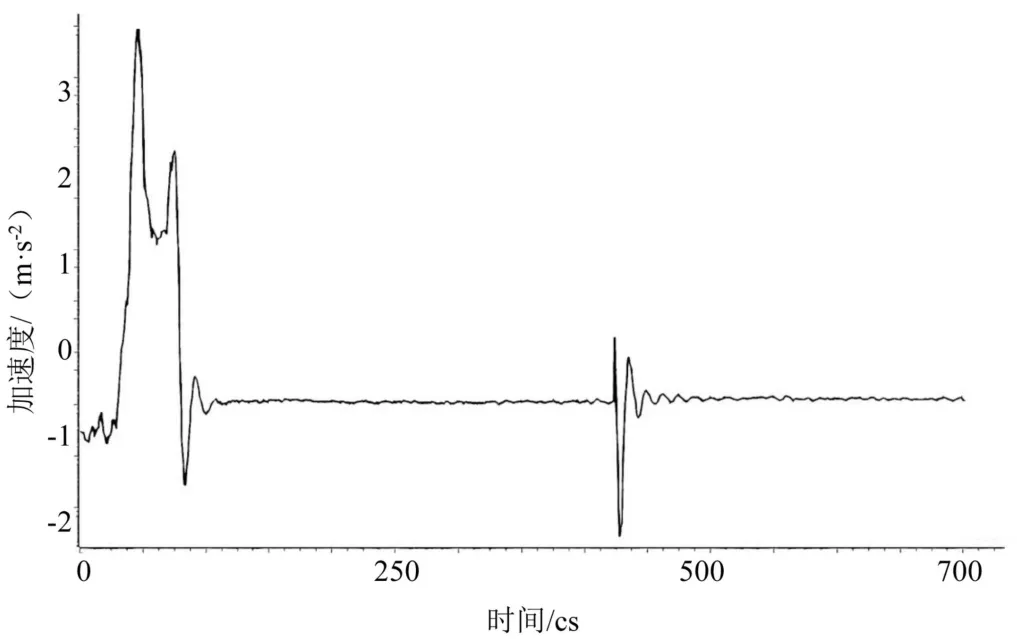
图9 Y 轴动量轮输出曲线

图10 Z 轴动量轮输出曲线
由图8—图10 可以看出,样机可以保持平衡,且在受到一定扰动时仍能够拥有较好的鲁棒性,说明PID控制算法对样机整体有较好的适应性与控制性,验证了设计和控制算法在一定程度上的可行性。
5 结论
本文基于角动量守恒定律设计了一种动量轮平衡的位姿控制器,以整机的角速度与角度作为主要控制量,以电机的转速及它产生的角动量作为次变量构成了PID 控制,即使整机受到一定程度的干扰时,仍能保持较好的鲁棒性。
