一种基于麻雀搜索算法的空中目标意图预测方法*
2023-06-01邱楚楚熊正祥吴广宇
邱楚楚,熊正祥*,吴广宇,徐 池
(1.海军大连舰艇学院,辽宁 大连 116018;2.解放军91991 部队,浙江 舟山 316041)
0 引言
空中目标意图预测作为舰艇防空作战中态势感知的关键环节,是指挥人员评估目标威胁,制定抗击方案,正确实施指挥决策的基础,对于提高舰艇作战能力具有重要的作用。同时,在信息化条件下,随着战场信息量剧增,敌我对抗复杂化,单纯依靠人工方式难以准确地预测敌方目标的意图[1]。因此,需要在作战系统中嵌入意图预测模块,辅助指挥人员进行对空防御指挥决策,从而更好地应对空中威胁。
在意图预测研究方面,早期主要通过逻辑推理和相似度匹配的方式进行意图的分析和预测,形成了基于贝叶斯网络推理的意图预测方法[2-3],基于模糊Petri 网推理的意图预测方法[4],基于D-S 证据理论组合的意图预测方法[5]和基于特征模板匹配的意图预测方法[6]。这些方法虽然均能直观、有效地预测目标意图,但其推理模型和模板均依靠专家经验进行构建,而在复杂战场环境下,可能存在专家经验不足的问题,导致这些方法不能够较好地适用于复杂战场环境下的目标意图预测。近年来,随着人工智能的发展,许多新技术被运用到意图预测中。其中,机器学习通过对数据的自学习而不依赖专家经验构建内部参数框架的特点,较好地克服了传统预测方法的缺陷,形成了以BP 神经网络为代表的人工神经网络预测模型[7-8]和支持向量机预测模型[9-10]。
BP 神经网络能够实现数据的非线性映射,泛化能力强,对于未知数据的分类效果较好,但需要有大量的样本数据作为学习基础。而舰艇防空作战中空中目标的意图数据获取难度较大,属于稀疏类数据,数据规模以小样本为主,故无法满足BPNN 对大样本的需要,难以满足防空作战对意图预测的高准确性和强稳定性的要求。基于小样本的机器学习方法可较好地解决此类问题。目前,常用的小样本机器学习方法主要有基于支持向量机和基于极限学习机的方法。其中,基于前馈式网络的极限学习机在泛化性上具有一定优势,而基于统计学习理论的支持向量机有更高的准确性和稳定性,故综合考虑支持向量机更加符合防空作战中意图预测的需要。但SVM 的预测效果主要取决于内部惩罚参数和核参数的寻优情况,而传统遗传算法在参数寻优时存在收敛速度慢,寻优结果差的情况,从而无法使SVM 的分类性能达到最佳。针对上述问题,提出一种基于麻雀搜索算法优化支持向量机的空中目标意图预测方法,采用SVM 作为意图预测的主体部分,契合样本规模实际,同时运用全新的群智能算法SSA 完善寻优机制,构建SSA-SVM 空中目标意图预测模型,通过仿真实验验证模型的有效性,为舰艇防空作战中更好地进行空中目标意图预测提供一种可行的方法。
1 意图预测的描述与分析
目标意图作为一个抽象事物,不具有可视性,无法被直接观测,需要通过目标的运动状态、属性等可观测到的参数变量进行间接判断。因此,目标意图预测问题的实质就是利用观测到的信息对其意图进行推测[11]。
在舰艇防空作战中,空中平台常见的行动意图一般有侦察、攻击、掩护、监视和其他。舰艇可通过自身探测设备或外部支援方式获取空中平台的相关信息,包括平台的高度、速度、航向、方位、距离等,并在此基础上,从中提取与意图有关的信息作为特征参数,输入到预测模型中进行意图推测。相关的信息传输流程如图1 所示。

图1 意图预测的信息传输流程图Fig.1 Information transmission flow chart of Intention Prediction
目标信息与意图间的关系如下:
1)目标高度:战斗机在攻击舰艇时,通常采用低空突防战术,以躲避舰艇雷达的搜索,此时目标的飞行高度较低,可至几百米;侦察机和预警机在执行侦察和监视任务时,需要避免受到舰艇防空火力的打击,此时目标的飞行高度较高,可至几万米。
2)目标速度:战斗机在执行攻击任务时,通常为达成压缩敌方的抗击时间,增大敌方抗击成本的目的,会以高速接近敌方舰艇,在执行掩护任务时,则会与被掩护的目标保持相近的速度;侦察机和预警机在执行侦察和监视任务时,通常为保证更长的留空时间,进而发挥平台的最佳性能,会以经济航速(中低速)进行巡航。
3)目标距离:战斗机通常会突防至百公里左右,发射导弹对敌方舰艇进行攻击;侦察机和预警机作为空中情报收集和指挥平台,属于重要战术节点,通常在百公里以外对敌方编队进行侦察和监视,避免遭受敌方打击。
4)目标航向、方位:目标航向和方位与意图的关联性不强,但由航向和方位可以计算出目标的敌向角,该信息与意图关联紧密。通常,战斗机攻击舰艇时,会直接朝着舰艇的方位接近,此时敌向角较小,对舰艇的威胁较大,而在掩护其他目标时,不会直接朝着舰艇的方位,敌向角较大,对舰艇的威胁较小;侦察机和预警机执行侦察和监视任务时,通常不会朝着舰艇的方向飞行,避免触发舰艇的火力反击,故敌向角较大。
5)目标属性:战斗机通常属于中小型目标,而侦察机和预警机通常属于中大型目标。因此,当观测到目标属性为中小型时,目标意图为攻击和掩护的可能性较大;当观测到目标属性为中大型时,目标意图为侦察和监视的可能性较大。
综上分析,确定从目标观测信息中提取得到的与意图关联的特征参数为目标高度、速度、距离、敌向角和属性。
2 SSA-SVM 空中目标意图预测模型构建
2.1 支持向量机
支持向量机(support vector machine,SVM)是建立在统计学习理论、VC 维理论和结构风险最小化原理基础上的机器学习方法[12]。与BPNN 相比,SVM 对样本的数量需求低,能够较好地对小样本、非线性、多纬数的问题进行求解。
在对数据进行分类时,SVM 将数据由低维空间映射至高维空间,并在高维空间中采用间隔最大化的学习策略,求解最优分类平面,从而完成对数据的最佳分类,使分类正确率达到最高。分类平面的函数表达式为:
其中,x 为数据的特征向量;y 为数据标签;wT为分类平面的法向量;b 为分类平面的偏移量。
对于最优分类平面的求解,可引入拉格朗日因子α 和惩罚参数C,利用拉格朗日对偶特性,将问题转化为式(2)的形式。
求解式(2),可得到最优分类平面参数w*和b*为:
其中,α*为最优的拉格朗日因子。同时,为避免数据在空间转化过程中内积产生的庞大计算量,通常引入核函数来替代数据特征向量的内积,则式(3)可表示为:
则最优分类平面的函数表达式为:
由式(2)~式(5)可知,最优分类平面实际上取决于惩罚参数C 和核函数K 中参数。因此,C 和K中参数的好坏就决定了SVM 分类性能的强弱。
2.2 麻雀搜索算法
麻雀搜索算法(sparrow search algorithm,SSA)是一种全新群智能优化算法,根据麻雀种群的捕食和反捕食的觅食策略进行迭代寻优,找到空间中能量最高的位置[13],则该位置参数即为所求解问题的最优解。
通常,麻雀进行觅食时,种群中存在3 类角色,分别是发现者、加入者和警戒者。发现者所处位置好,拥有的能量高,负责为加入者提供高能食物的区域和方向;加入者所处位置较差,拥有的能量低,但具有较强的感知能力,能够感知发现者的位置,并向其接近,获取更多的能量;警戒者由一定数量的发现者和加入者担负,负责种群觅食过程中的反捕食工作,发现危险时及时发出警报,并在发现者的带领下逃脱[14]。假设各麻雀的位置Xi为d 维行向量,其中,i 为麻雀编号,则种群中发现者、加入者和警戒者的位置变换分别表示为式(6)~式(8):的随机数;η 为[-1,1]中的一个随机数;ε 为一极小常数。

SSA 的寻优步骤如下:
Step 1 初始化种群,设置种群规模Num,发现者、加入者、警戒者的数量Dr、Fr、Ar,最大迭代次数Tmax,初始位置X0,警戒阈值S;
Step 2 将种群中各麻雀的初始位置代入SVM中,计算各麻雀适应度值(能量值),并对适应度值由大至小排序,找到最大和最小适应度值的麻雀;
Step 3 选取适应度值排序前Dr 只的麻雀作为种群中的发现者,按式(6)进行位置变换;
Step 4 选取剩余的Fr 只麻雀作为种群中的加入者,按式(7)进行位置变换;
Step 5 随机选取Ar 只麻雀作为种群中的警戒者,按式(8)进行位置变换;
Step 6 计算种群中各麻雀位置变换后的适应度值,并由大至小排序,找到最大和最小适应度值的麻雀;
Step 7 对比位置变换前后的最大适应度值,若变换后的大于变换前的,则此代种群的最优位置为变换后的位置,反之,则为变换前的位置;
Step 8 若当前代数t<Tmax,则返回Step 3 执行;反之,则输出最优位置参数。
SSA 的寻优流程如图2 所示。
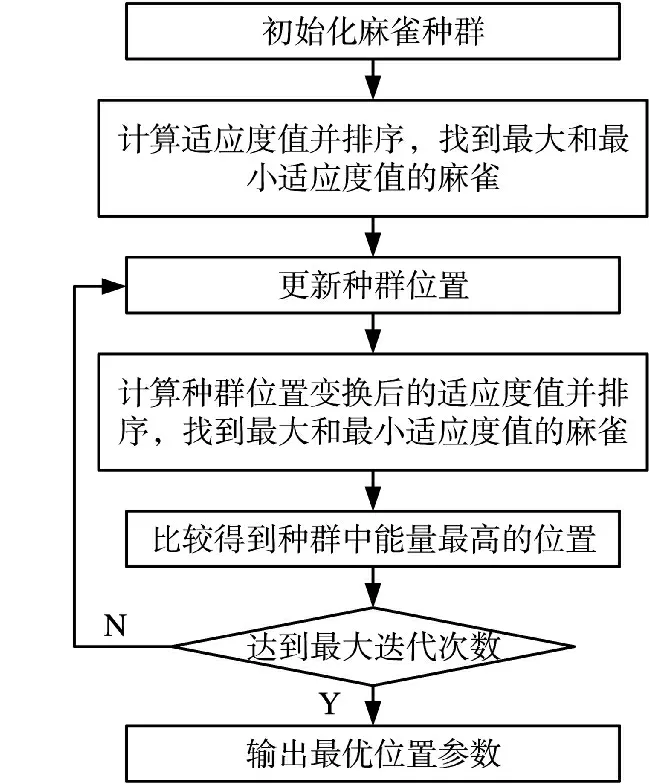
图2 SSA 的寻优流程图Fig.2 Optimization flow chart of SSA
2.3 模型组成和运行
SSA-SVM 空中目标意图预测模型由数据处理模块、参数寻优模块、机器训练模块和机器识别模块组成。各模块间的信息传递情况如图3 所示。
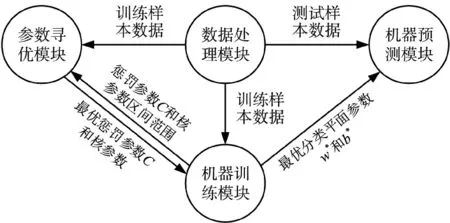
图3 模型各组成模块间信息传递情况Fig.3 Information transmission status among each component module of the model
1)数据处理模块:该模块用于对目标样本数据进行标签化和归一化处理,得到符合机器使用的无量纲数据,并将其中的训练样本数据传输给参数寻优模块和机器训练模块,将测试样本数据传输给机器预测模块。
2)参数寻优模块:该模块用于寻找SVM 中惩罚参数C 和核参数的最优值。通过接收数据处理模块传输的训练样本数据和机器训练模块传输的惩罚参数C 和核参数的区间范围,运用SSA 找出最优惩罚参数C 和核参数,并返回给机器训练模块。
3)机器训练模块:该模块用于确定SVM 的最优分类平面参数。通过接收数据处理模块传输的训练样本数据和参数寻优模块返回的最优惩罚参数C和核参数,进行机器自学习,得到最优分类平面参数w*和b*,并传输给机器预测模块。
4)机器预测模块:该模块用于预测目标意图。通过接收机器训练模块传输的最优平面参数w*和b*,生成最优分类平面,对数据处理模块传输的测试样本数据进行目标意图预测,并与目标真实意图进行对比,检验模型的预测准确性。
SSA-SVM 空中目标意图预测模型的运行流程如图4 所示。
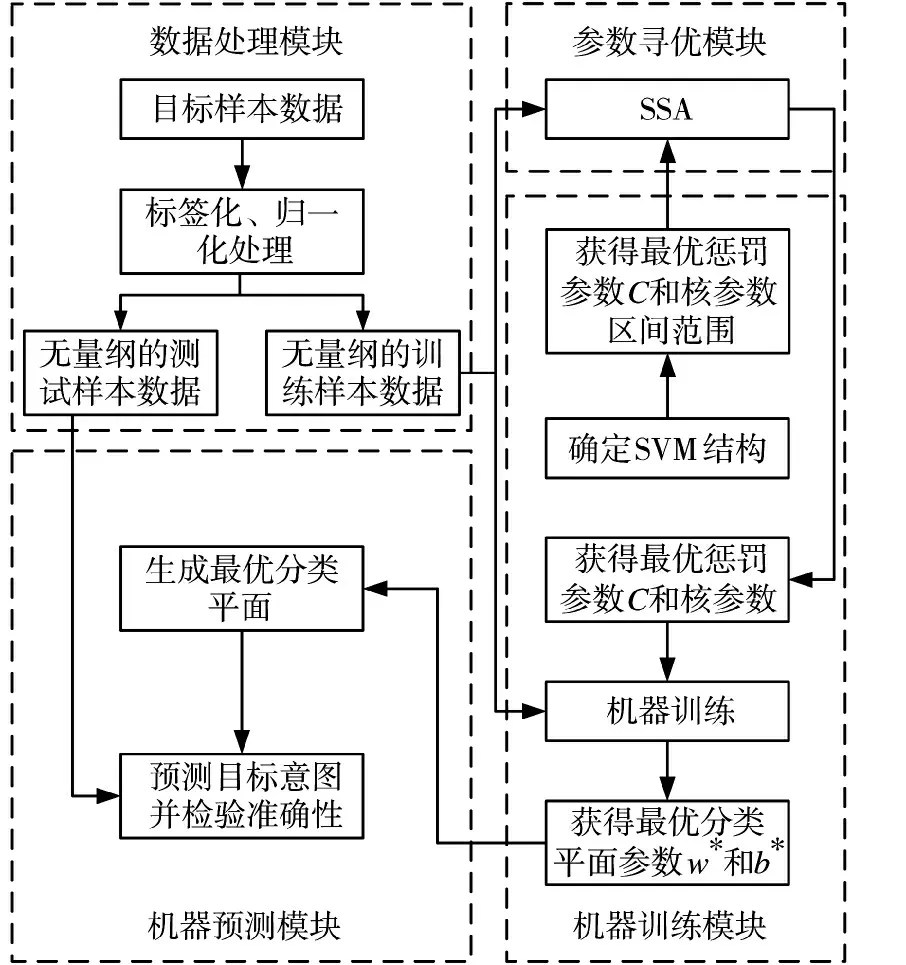
图4 模型运行流程图Fig.4 Flow chart of model operation
模型运行的主要步骤如下:
Step 1 数据处理:将目标样本数据中的离散型特征参数和目标意图转化为数值标签,再对同类特征参数进行归一化处理;
Step 2 确定SVM 结构:确定SVM 的核函数类型,设置惩罚参数C 和核参数的区间范围;
Step 3 SSA 参数寻优:将惩罚参数C 和核参数作为种群的位置参数,求参数最优解;
Step 4 机器训练:根据最优的惩罚参数C 和核参数,利用训练样本数据进行机器自学习,得到SVM 的最优分类平面参数w*和b*;
Step 5 意图预测和准确性检验:根据最优分类平面参数w*和b*,生成SVM 的最优分类平面,将测试样本数据中的特征参数输入SVM 中,输出目标的意图预测数值标签,得到目标对应意图,并与目标真实意图进行对比,检验预测的准确性。
3 模型仿真分析比较
通过SSA-SVM 与GA-SVM 和BPNN 意图预测情况的仿真分析比较,检验SSA-SVM 的预测性能。
3.1 数据准备
目标样本数据采用文献[15]中的数据,并根据特征参数的设置,将目标数据中的航向角和方位角转化为敌向角,则得到的训练样本数据和测试样本数据分别如表1 和表2 所示。
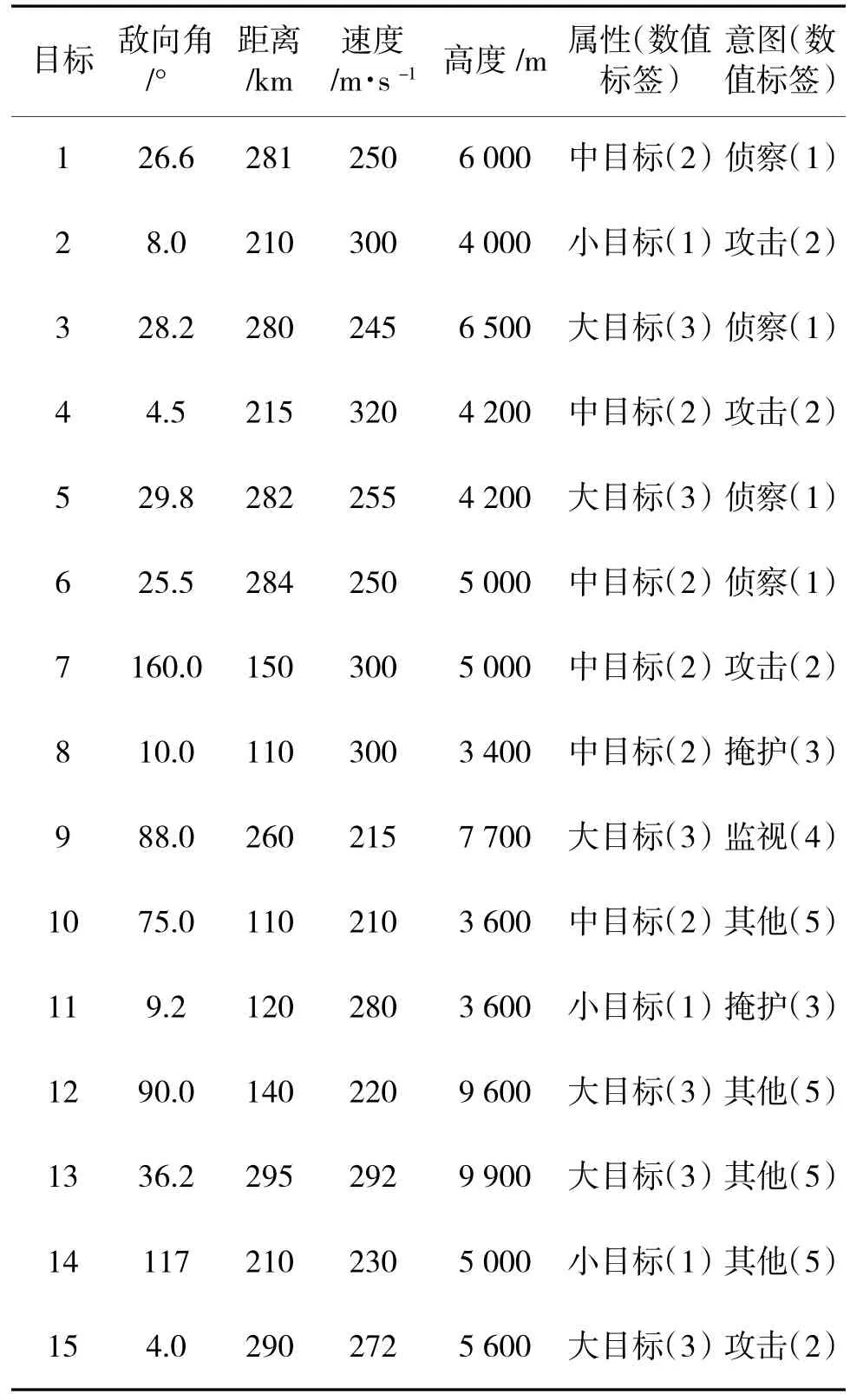
表1 训练样本数据Table 1 Data of training samples
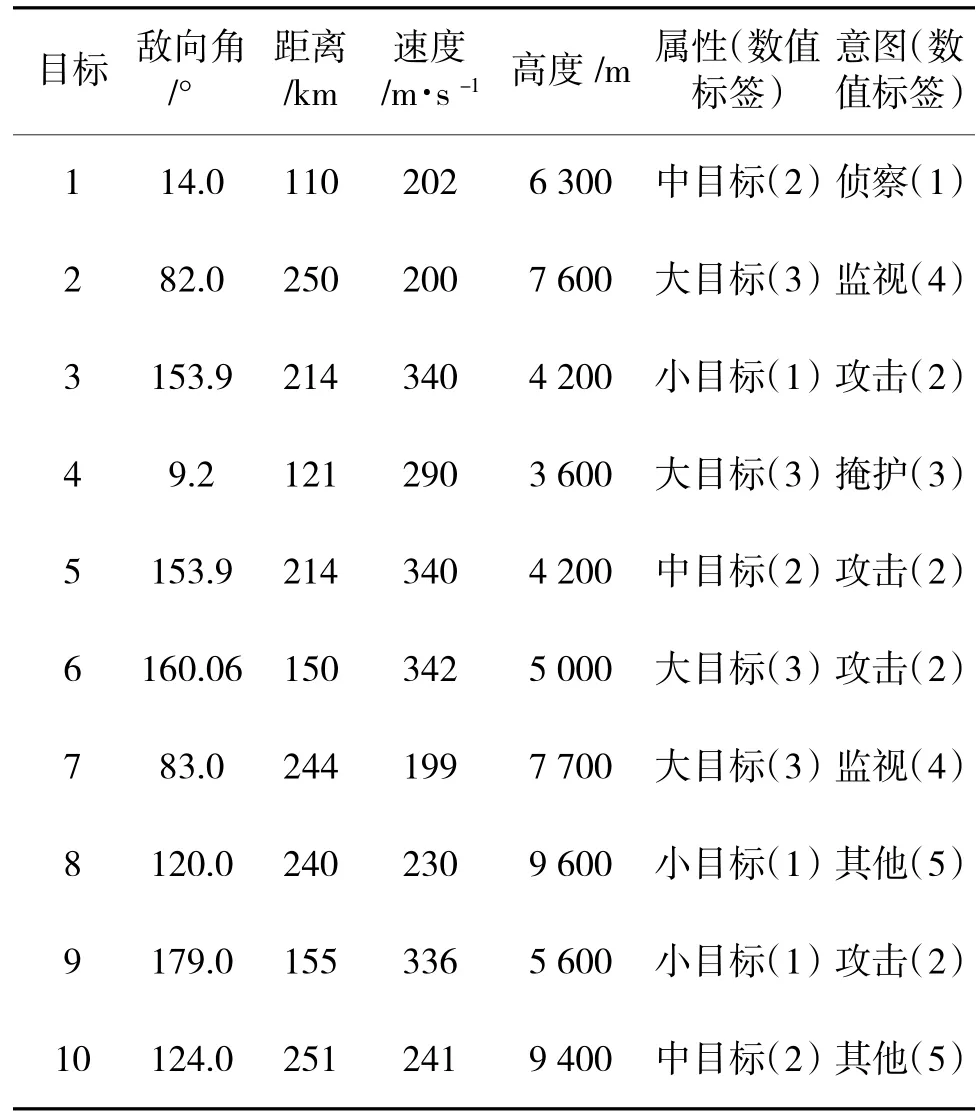
表2 测试样本数据Table 2 Data of test samples
其中,目标的离散型特征参数属性和目标意图按照表1、表2 中的标注转化为对应数值标签。
3.2 仿真参数设置
参照GA 算法和SSA 算法常用的典型参数设置,具体如下:
GA 参数设置:种群规模Num=20,最大迭代次数Tmax=50,代沟gap=0.9,种群初始位置由系统随机生成。
BPNN 参数设置:输入层、输出层、隐含层节点数in=5,out=5,hid=10,最大迭代次数Tmax=50,初始权值和阈值由系统随机生成。
SSA 参数设置:种群规模Num=20,最大迭代次数Tmax=50,发现者数量Dr=4,加入者数量Fr=16,警戒者数量Ar=4,警戒阈值S=0.8,种群初始位置由系统随机生成。
SVM 参数设置:选取应用最广泛的径向基函数(RBF)作为SVM 的核函数,则其核参数为g。设置惩罚参数C 的区间范围为[10-6,102],核参数g 的区间范围为[10-6,103]。
3.3 仿真分析比较
3.3.1 SSA-SVM 和GA-SVM 对比
运用MATLAB R2016a 软件对SSA-SVM 和GA-SVM 进行仿真实验,得到SSA-SVM 和GASVM 参数寻优的收敛情况,如图5 所示。
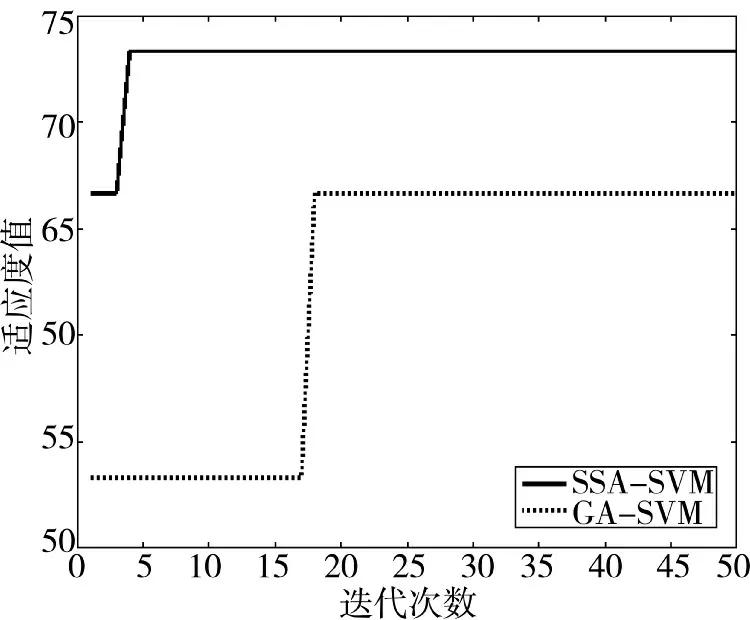
图5 SSA-SVM 和GA-SVM 参数寻优的收敛曲线Fig.5 Convergence curve of parameter optimization of SSA-SVM and GA-SVM
由图5 可知,SSA-SVM 相比GA-SVM 具有更快的收敛速度和更高的适应度值。因此,SSA-SVM的参数寻优能力更强,能够寻找到更优的惩罚参数C 和核参数,从而提高模型的预测准确性。
3.3.2 SSA-SVM 和BPNN 对比
运用MATLAB R2016a 软件对SSA-SVM 和BPNN 进行6 次独立重复实验,得到SSA-SVM 和BPNN 的意图预测结果,如图6 所示。
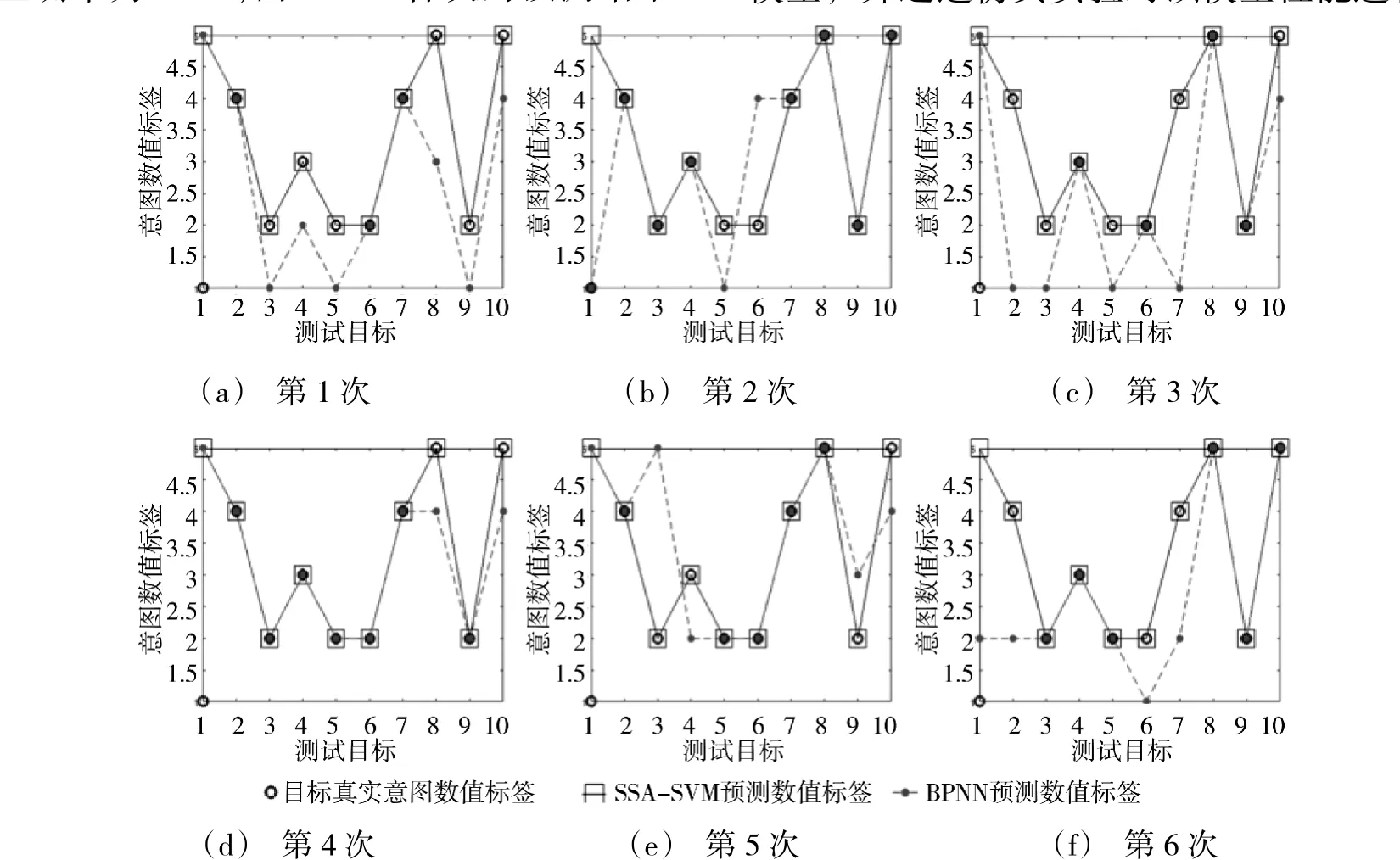
图6 SSA-SVM 和BPNN 意图预测结果Fig.6 Intention prediction results of SSA-SVM and GA-SVM
由图6 可知,SSA-SVM 各次的预测结果均一致,预测正确率为90%;而BPNN 各次的预测结果均不一致,预测正确率分别为30%、80%、40%、70%、50%、60%,相互间差异明显,且最高的正确率低于SSA-SVM。因此,SSA-SVM 相比BPNN 具有更高的预测准确性,且预测结果稳定,无波动情况。
综合上述实验结果分析可知,在进行意图预测时,GA-SVM 的参数寻优收敛较慢,适应度值较低,导致寻优能力较弱,无法获取SVM 最优的惩罚参数C 和核参数,使得预测准确性无法达到最佳;而BPNN 在小样本数据预测中,由于样本数量较少,使得各次实验中网络的权值和阈值差异较大,导致预测结果不稳定,随机性较强且准确性高低差异较大。因此,GA-SVM 和BPNN 均不利于舰艇防空作战中指挥人员对空中目标意图准确和稳定的掌握,无法满足防空作战意图预测对高准确性和强稳定性的需求,将影响指挥决策的实施。与上述两模型相比,SSA-SVM 在利用SSA 克服了GA 参数寻优能力不足的同时,以SVM 作为意图预测的主体部分,克服了BPNN 在小样本数据下预测稳定性和准确性的缺陷,提高了对空中目标意图预测的准确性,保证了预测结果的稳定,从而提升了预测性能,将有利于舰艇防空作战中指挥人员更有效地掌握空中目标意图,为辅助指挥人员实施指挥决策提供了更有力的保障。
4 结论
本文提出了一种基于SSA-SVM 的空中目标意图预测方法,构建了SSA-SVM 空中目标意图预测模型,并通过仿真实验对该模型性能进行了检验。结果表明,在舰艇防空作战空中目标意图预测中,SSA-SVM 相比GA-SVM 的参数寻优能力更强,相比BPNN 具有更高的预测准确性和更稳定的预测结果。因此,模型的预测性能得到了较大的提升,可以满足空中目标意图预测对高准确性和强稳定性的需求,为舰艇防空作战中更好地进行空中目标意图预测提供了一种可行的方法,从而为更有效地辅助指挥人员掌握空中态势,实施指挥决策提供了有力的支持。下一步在此基础上对参数的学习效果进行分析研究,以更加完善地对SSA-SVM 算法进行学习。
