基于多状态故障树的舰船装备可靠性分析方法*
2023-06-01董正琼李晨阳唐少康周向东
董正琼,李晨阳,唐少康,聂 磊*,周向东
(1.湖北工业大学,武汉 430068;2.湖北省现代制造质量工程重点实验室,武汉 430068)
0 引言
舰船装备是现代海上军事力量的重要体现,其性能愈发强大,其结构与系统也愈发复杂,故对舰船装备开展可靠性分析,掌握其工作状态,对于提升维修保障能力以及时刻保持作战能力具有非常重要的意义。一般而言,传统的舰船装备可靠性分析[1-2]研究仅考虑了正常和故障两种状态,但其单元部件受恶化环境影响或长时间工作导致性能下降后,还可能呈现出介于完全工作与完全失效之间的过渡状态[3];此外,在舰船结构的表决系统[4]中,处于正常工作的单元部件越多,其性能则越强,而根据正常工作的单元部件数目不同,系统同样可能处于正常、带故障运行或故障状态。为此,对舰船装备进行可靠性分析时,为更贴合其实际工作情况,可进一步考虑系统和单元部件的多状态变化过程,从而总结出其性能退化趋势,找出系统性能降低的内在原因,为维修决策给出预见性指示,进而更好地为使用舰船装备及其维修保障能力提升提供新思路。
目前,已有诸多学者针对舰船装备开展了多状态系统的可靠性分析工作,并取得了较为丰硕的研究成果[5-6]。例如,文献[4]以舰船电力系统为例,将马尔科夫过程与通用生成函数方法相结合,建立了“k-out-of-n”多状态系统可用性模型,实现了系统的可用度估算。文献[7]以舰船动力系统为对象,在考虑性能退化的多状态可靠性分析理论基础上,定义了系统和单元部件多状态可靠性函数,实现了对系统可靠性的变化规律进行分析。文献[8]考虑到电子装备具备“安全-潜在故障-故障”多状态,结合贝叶斯网络建立了多状态装备可靠性分析模型,在此基础上对系统的可靠性进行了有效评估,并为潜在故障诊断与预测奠定了理论和技术基础。文献[9]通过引入马尔科夫模型,描述船舶设备多状态间的跳变过程,建立了可用于解算不同时变状态概率的通用微分方程组,在此基础上给出多状态装备单元瞬态和稳态过程的重要可靠性参数解算方法和评估结果。
总的来说,上述舰船装备可靠性分析方法虽然在一定程度上考虑了系统和单元部件的多状态影响,但分析过程均比较复杂,最需要指出的是均未考虑系统可维修的实际情况。以此为出发点,本文借鉴有限退化结构(finite degradation structures,FDS)理论[10]构建舰船装备多状态可靠性模型,将传统故障树模型的底层事件布尔单元定义为可维修的三态(正常、劳损降级和故障)单元部件,将中间事件定义为正常、带故障运行和故障3 种状态,利用抽象映射反映事件之间的从属关系,根据各底事件发生概率对舰船装备多状态的可靠性评估指标进行定量计算。此外,本文将结合多智能体技术建立舰船装备的多状态可靠性仿真模型,以统计故障、维修信息以及相关的可靠性参数等,从而为随舰工作人员合理使用舰船和利用有限资源提供明确方向。
1 基于多状态故障树的可靠性分析方法
舰船装备执行任务通常需由动力、电力、武器、通讯等系统配合完成,各系统分别由单元部件和子系统所构成[11],本文所建故障树的底事件为单元部件故障,中间事件为子系统故障,顶事件为系统故障。以研究电力系统故障为例,在传统二态布尔单元组成的故障树模型[12]基础上,将底事件改进为正常(W)、劳损降级(D)和故障(F)状态进行描述,中间事件则定义为正常(W)、带故障运行(D)和故障(F)状态。
以电力系统不发生顶事件为分析目标,首先将电力系统的基本结构采用如图1 所示的可靠性框图进行抽象描述,并以此为基础建立了如图2 所示的电力系统故障树,其底层单元部件包括W、D 和F 3 种状态。在图2 所示的多状态故障树中,子系统1属于2/4 表决系统,共有W、D 和F 3 种状态,每种状态与其组成单元部件1、2、3 和4 之间的状态映射关系φ1如式(1)所示。
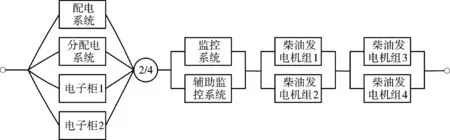
图1 电力系统可靠性框图Fig.1 Block diagram of reliability of power system
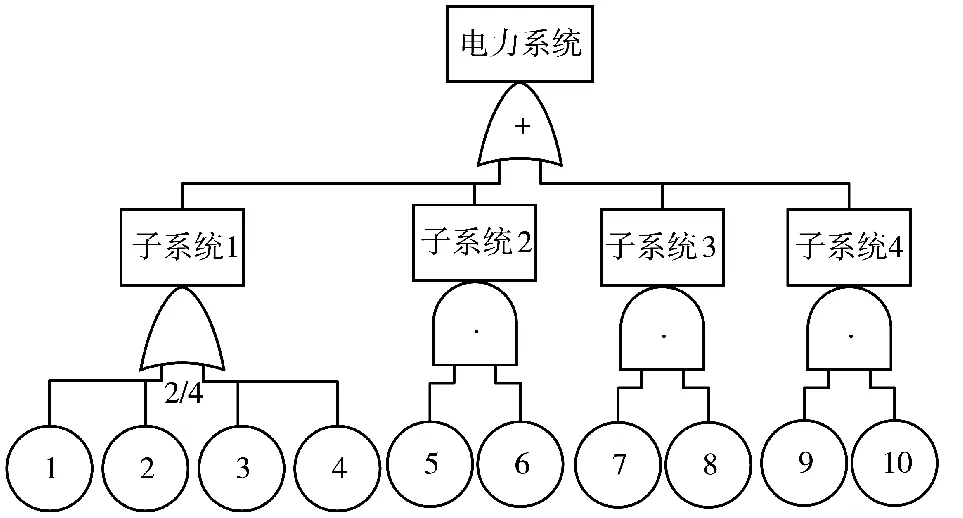
图2 电力系统故障树Fig.2 Fault tree of power system
其 中,W1D1F1、W2D2F2、W3D3F3和W4D4F4分 别 为 单元部件1、2、3 和4 的状态;⊗为张量积,代表状态间的多重线性映射;→表示状态概率的传播方向;WS1DS1FS1代表子系统1 的状态。式(2)~ 式(4)为子系统1 不同状态对应的单元部件状态合集。
式中,x、y、z 和u 分别为单元部件1、2、3 和4 的状态。根据式(2)~式(4)所描述的系统与单元部件之间的状态关系,子系统状态概率p(y1)的计算表达式为:
式中,p(x1)、p(x2)、p(x3)和p(x4)分别为单元部件1、2、3 和4 的状态概率,(x1,x2,x3,x4)表示4 个单元部件状态的组合。
由于子系统2、3 和4 均是两个单元部件的并联组合,本文仅以子系统2 为例进行分析,其3 种状态与单元部件状态之间的映射关系φ2为:
式(7)~式(9)表示子系统2 状态对应两个单元部件5 和单元部件6 的状态合集。
由式(7)~式(9)可进一步得到子系统2 各状态的状态概率的表达式为:
式中,p(y2)表示子系统2 的状态概率;p(x5)和p(x6)分别为单元部件5 和单元部件6 的状态概率;(x5,x6)表示单元部件5 和单元部件6 状态的组合。
故障树的顶层为电力系统,其设有正常和故障两种状态,且与4 个子系统状态之间的映射关系σ 为:
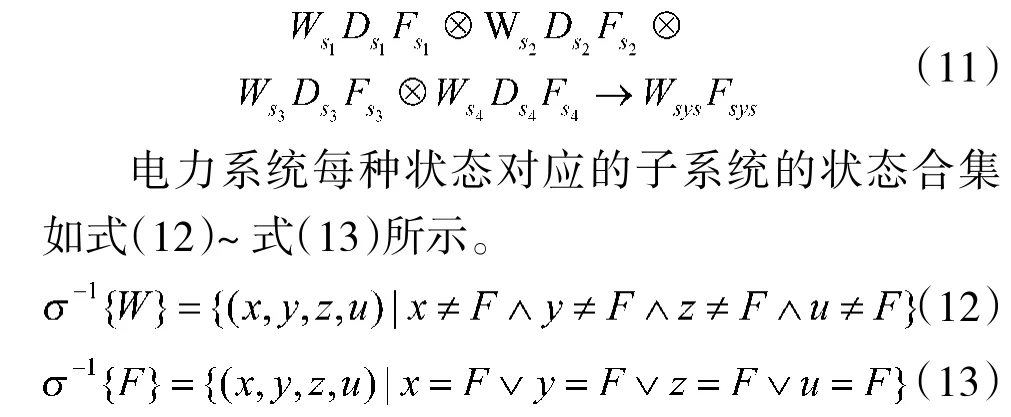
式中,x、y、z 和u 分别表示子系统1、2、3 和4 的状态。根据式(12)~式(13)描述的系统与子系统之间的状态关系,可得到电力系统状态概率p(z)为:
式中,p(z)表示电力系统的状态概率;p(yk)表示子系统的状态概率;(y1,y2,y3,y4)表示4 个子系统状态的组合。
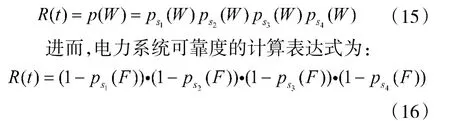
根据系统可靠度定义,以电力系统的正常状态概率表示其系统可靠度,即满足这种需求的子系统状态集的概率为系统可靠度:
2 案例分析
2.1 电力系统仿真建模
为验证本文所提方法的有效性,利用智能体技术建立了单元部件、子系统和系统智能体,分别作为故障树的底事件、中间事件和顶事件。图3 为电力系统的故障树模型,单元部件与系统的不同运行状态采用颜色进行区分,包括绿色(W)、黄色(D)和红色(F)。具体地,模型底事件、中间事件和顶事件的仿真运行机制如下所述。
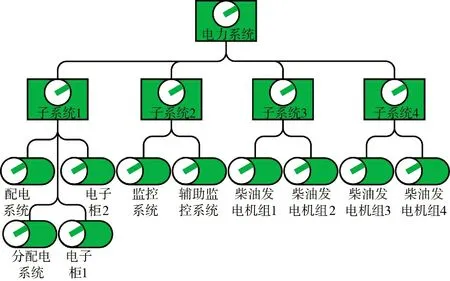
图3 电力系统的故障树模型Fig.3 Fault tree model of power system
2.1.1 底事件——单元部件故障
底层单元部件智能体设置有正常、劳损降级和故障3 种状态,其可靠性状态转移逻辑如图4 所示,若在规定时间阈值内发生故障,则从正常变迁为故障状态;正常工作时长超过规定时间阈值,则变迁为劳损降级状态,并保持该状态直至故障发生为止;进入故障状态后,需等待维修资源的调度,维修活动结束后将变迁为正常状态。
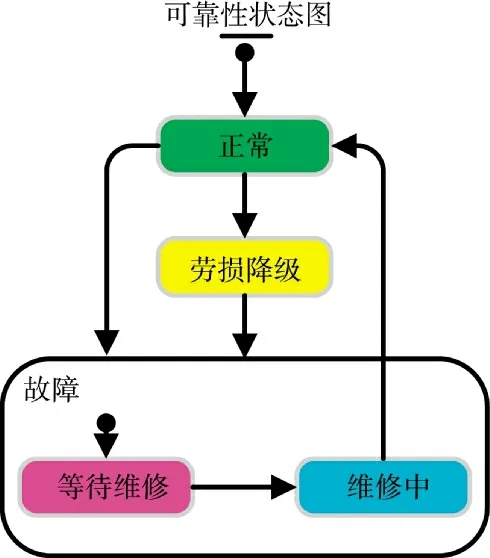
图4 单元部件可靠性状态转移图Fig.4 Reliability state transition diagram of unit components
仿真运行时,需根据可靠性参数服从的相应分布,模拟生成单元部件的使用寿命,以此触发不同状态之间的变迁。设舰船装备的单元部件寿命服从威布尔分布[13],其可靠性函数R(t)为:
式中,β 为形状参数,决定概率密度曲线基本形状;γ为尺度参数,起比例尺放大或缩小作用;η 为位置参数,决定曲线与坐标轴的相对位置。
由式(12)可得单元部件的累积概率分布函数F(t)为:
在0 ≤τ ≤1 范围内,对τ = F(t)进行反变换求解,即可得到使用寿命t:
2.1.2 中间事件——子系统故障
子系统智能体的状态包括正常、带故障运行和故障,图5 为其可靠性状态转移图。为处理子系统所属的单元部件的串、并联和表决逻辑关系,在子系统智能体中设置有冗余度,其表示子系统在不发生故障的情况下,允许单元部件故障的最大数量。若单元部件故障数目为零,子系统向正常状态变迁;当故障数目在零至冗余度范围之间,子系统状态向带故障运行状态变迁;当故障数目大于冗余度,其状态向故障状态变迁。
2.1.3 顶事件——系统故障
作为故障树模型的顶层,系统智能体的状态是所有单元部件状态合集的综合效应,其可靠性状态转移图如图6 所示,主要描述系统正常与故障状态之间的变迁。与子系统类似,系统智能体也设有冗余度。当子系统的故障数目大于其冗余度,系统状态由正常向故障状态变迁;反之,则由故障向正常状态变迁。
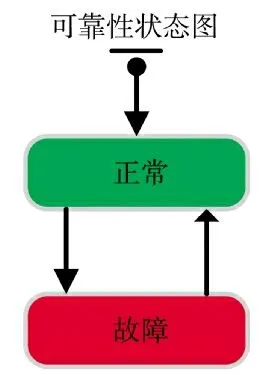
图6 系统可靠性状态转移图Fig.6 Reliability state transition diagram of system
2.2 仿真结果分析
将图3 所示电力系统的单元部件配电系统、分配电系统、电子柜1、电子柜2、监控系统和辅助监控系统的规定时间阈值设为5 000 h,柴油发电机组1、2、3 和4 设置为1 500 h;将模型输入尺度参数γ设为1,位置参数η 为0,单次仿真时长为10 000 h,形状参数β 的取值设为MTBF,各单元部件的平均故障间隔时间(MTBF)均值来源于文献[14];通过多次蒙特卡洛循环仿真,当系统可靠度的取值趋于稳定时,统计单元部件的正常、劳损降级和故障状态工作时间及其维修次数的平均值,统计结果如下页表1 所示。进一步地,根据式(5)、式(10)和式(15)即可计算得到子系统状态概率和系统可靠度,如表2 所示。
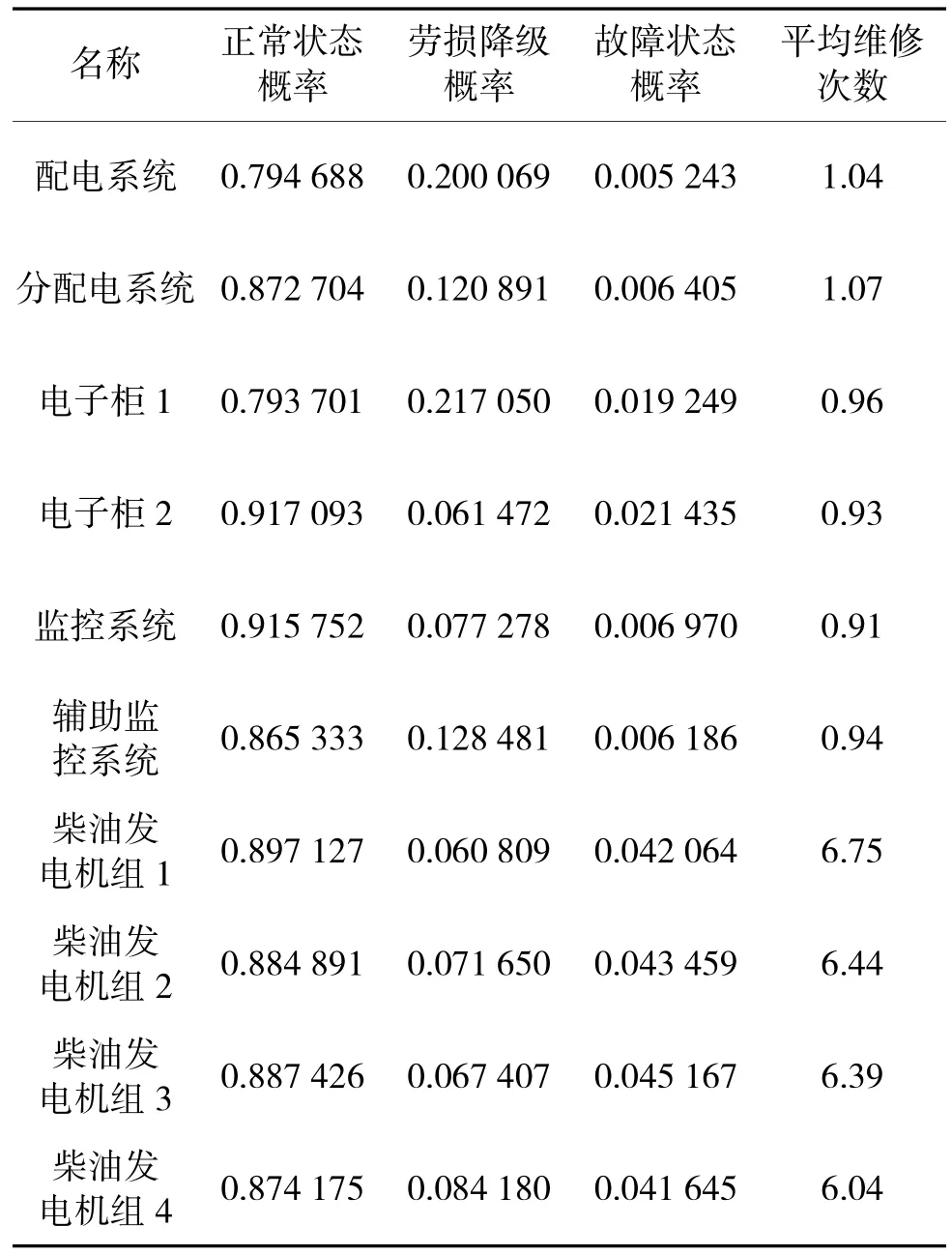
表1 各单元部件的可靠性分析结果Table 1 Reliability analysis results of each unit component
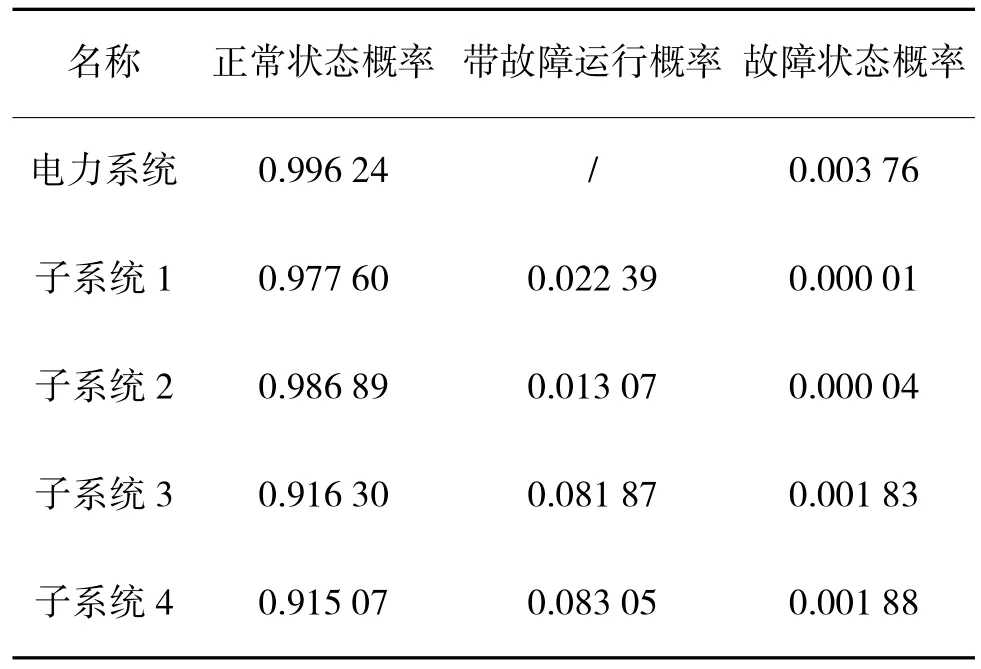
表2 电力系统及其子系统的可靠性分析结果Table 2 Reliability analysis results of power system and subsystems
由表1 可以看出,监控系统的正常状态概率最高,平均维修次数最少;柴油发电机组1 的平均维修次数最多;柴油发电机组3 对应的故障状态概率最高。由表2 可知,电力系统的可靠度值即系统的正常状态概率为0.996 24,子系统3 和子系统4 的故障状态概率远高于其他子系统,主要原因为:其单元部件柴油发电机组1、2、3 和4 的故障状态概率均较高。
在上述分析结果基础上,定义了式(20)对各单元部件的故障时长占比进行计算,可反映其与系统同时处于故障状态的概率。图7 为各单元部件的故障时长占比计算值,其中,柴油发电机组3 故障时长占比最高,达到了64.8%,其次是柴油发电机组4,占比较小的单元部件未在此显示。根据该分析结果,原则上可通过优先关注故障时长占比更大的单元部件来提高系统的可靠性,为舰船的科学使用,作出合理的维修策略给予参考。
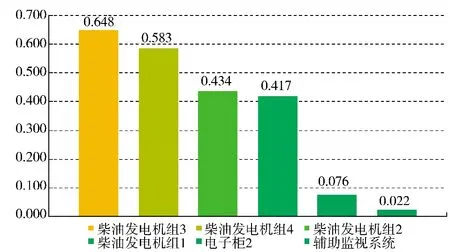
图7 故障时长占比柱状图Fig.7 Bar chart of failure duration ratio
3 结论
本文考虑舰船装备多状态的实际工作情况,提出一种基于多状态故障树的舰船装备可靠性分析方法,克服了传统故障树方法无法分析系统和单元部件中间过渡状态的局限。以电力系统为例,在考虑单元部件可维修的情况下,结合智能体技术建立了“电力系统-子系统- 单元部件”的多层次故障树仿真模型,并将底事件单元部件定义为正常、劳损降级和故障3 种状态;通过多次蒙特卡洛仿真计算,得到了各单元部件的正常状态概率、劳损降级状态概率和故障状态概率,以及维修次数、子系统的各状态概率、电力系统的可靠度、各单元部件的故障时长占比等指标;并根据故障状态占比对单元部件的关注度进行排序,为舰船的维修保障方案进行优化指导。后续研究中,将进一步丰富舰船装备多状态系统的含义,建立行为更加复杂的可靠性仿真模型,结合专家打分及个性优化算法对舰船装备进行故障预测,并给出合理的预防性维修方案。
