应用遗传算法的空间望远镜巡天观测中期规划方法
2023-05-31蒲奕铮张柏楠张永
蒲奕铮 张柏楠 张永
(北京空间飞行器总体设计部,北京 100094)
解决宇宙早期暴涨的机理及引力、暗物质、暗能量的本质等基础科学问题,需要以大量的观测数据支撑相关研究,对宇宙天区进行大范围观测,因此大规模巡天观测成为当前天文学研究的热点领域。空间望远镜进行巡天观测时目标覆盖大片天区,任务数量极大且任务周期长,需要对望远镜的观测序列进行合理规划,以保证任务顺利执行。同时,空间望远镜在宇宙中运行,观测任务受到各种复杂约束条件的限制,使得规划问题变得更加困难。
国际上空间望远镜的建造起步较早,出于提高观测效率和保障望远镜运行的目的,天文观测领域高度重视任务规划研究,各种任务规划软件在望远镜上得到了实践验证,并在应用过程中得到了迭代优化。NASA在研制哈勃空间望远镜(HST)的同时开展了Spike规划系统的研究工作,通过启发式算法和贪婪算法分别完成HST的长期和短期规划[1],并将Spike系统泛用化后沿用在了斯皮策(Spitzer)空间望远镜、远紫外线光谱探测仪(FUSE)、日美联合X射线望远镜任务(ASTROD)、詹姆斯-韦伯空间望远镜(JWST)等一系列地基或空间天文观测设施的任务规划系统中[2]。ESA在赫歇尔(Herschel)空间望远镜上采用模拟退火算法进行短期规划[3],并针对欧几里得(Euclid)空间望远镜巡天观测覆盖面积大的特点开发了ECTlie系统对天区逐级划分,采用前瞻算法进行短期规划[4]。
相比于国外,我国空间望远镜的建设发展起步较晚,部署过慧眼(HXMT)、悟空(DAMPE)等天文卫星,大口径的空间望远镜正在研制当中。同时,国内对于卫星任务规划的研究主要集中于对地观测,对于天文观测规划方法的研究仍显不足。地基望远镜多数采用人工调度或由观测者自行调度的方法,近年来部署了一些自动规划算法用于完成望远镜观测调度[5-6]。对于天文卫星的观测任务规划问题,文献[7]采用基于观测序列窗口的多目标遗传算法完成了天文卫星的短期观测任务规划。文献[8]考虑突发任务重规划前后的整体优化性,采用改进的多目标观测任务规划算法完成了天文卫星的天文观测任务规划。对于巡天规划,目前仅有HXMT进行过一定的研究。文献[9]采用多目标遗传算法完成了简单姿态机动方式的HXMT巡天扫描规划。文献[10]结合贪婪算法和传统遗传算法,完成了最大化观测效率和观测收益的HXMT巡天观测长期规划。中国科学院国家天文台在空间望远镜项目中也对巡天长期规划进行了研究[11-12],但仍然需要开展结合望远镜具体飞行状况的中期规划研究。
空间望远镜观测规划问题存在一定的共性,在解决这些规划问题时,一般将其建模为约束满足问题进行求解,并通过长期规划和中短期规划相结合的方式构建完整的规划流程。其中:长期规划重点以科学需求为牵引,保证望远镜全寿命周期观测结果最佳。中短期规划则以月或周长度的观测序列确定为目标,在长期规划给出的观测序列组基础上,结合完整约束条件,确定实际在轨执行的观测序列并提高观测效率。但是,由于各个空间望远镜的运行轨道、科学目标及携带的仪器设施并不相同,它们进行任务规划时面临的难点可能并不相同,所受的约束条件及采用的具体规划算法也并不一致。
空间望远镜在地球轨道进行巡天观测时,同时面临复杂轨道约束条件限制及巡天大规模覆盖两大规划难点。为满足空间望远镜进行巡天观测时对观测序列进行编排优化,以提高观测效率、保证观测顺利执行的需求,本文建立了空间望远镜观测模型和约束模型,采用混合遗传算法进行序列优化,设计巡天观测中期规划系统对规划方法的正确性和有效性进行验证。
1 空间望远镜巡天中期观测规划问题
1.1 巡天观测规划问题特点
空间望远镜的观测规划系统的任务是考虑望远镜运行的具体情况,结合科学任务的需求,为观测任务确定具体执行时间,保证可观测时间得到充分利用并节约资源。空间望远镜运行在近地轨道,进行观测时受到日月光规避、地气杂散光规避、南大西洋异常区规避等多种复杂约束的影响,同时需要考虑轨道维持、姿态机动等飞行任务。以上因素决定了空间望远镜的观测规划问题是一个多约束条件的复杂优化问题。在传统的规划问题中,约束条件一般利用构建惩罚函数、生成不等式判断条件等方法进行处理。空间望远镜观测过程中受到的约束条件复杂,且需要调用仿真模块对其轨道、姿态进行计算,无法通过单一方式进行简单处理,必须对约束进行完整建模判断。
空间望远镜的主要科学任务是对大规模天区进行巡天观测。海量的观测任务和复杂的约束条件决定了在进行巡天观测任务规划时无法一步到位,应采用长期规划与中期规划相结合的方式。长期规划对以年为单位的大量目标进行全局优化,生成较短周期内的观测任务组提供给中期规划,但在进行长期规划时,由于任务数量和计算复杂度等问题而无法进行局部优化,且难以采用精确的姿态轨道模型。中期观测规划的规划周期较短,任务数量相对较少,需要充分考虑空间望远镜所受的复杂约束,建立更精确的望远镜姿态、轨道模型及约束模型,保证最终的任务规划结果不会违反约束条件,输入飞控系统后能够顺利在轨执行。不同层级规划系统之间的信息交互如图1所示。

图1 不同层级规划系统信息交互Fig.1 Information interaction between different levels of planning system
1.2 巡天观测规划问题模型
任务是观测规划系统中的基本规划单元,其基本信息包括任务编号、可执行窗口、持续时间和其他特殊信息,如观测任务的观测天区编号,任务前后等待时间和姿态机动时间等。规划系统的目的就是为这些任务在时间线上安排具体的开始时间和结束时间。观测任务包括成像阶段、姿态机动和姿态稳定阶段、进行其他平台活动的等待阶段。姿态机动和姿态稳定时间由姿态仿真系统给出,受到前后2次观测的指向以及望远镜所处轨道位置影响。观测任务的甘特图如图2所示。

图2 观测任务甘特图Fig.2 Gantt chart of an observation task
本文研究的中期观测规划问题的周期为数周至1个月,对象是长期观测规划系统给出的数百至数千个观测任务组成的任务组。与通常的任务规划问题相比,需要考虑更多观测任务和平台能力带来的约束条件,且待规划任务数量极大,优化问题的解空间范围极大,求解过程计算量极大。
在建立空间望远镜规划问题模型时,给出以下基本假设。
(1)规划系统需要考虑的任务为巡天观测任务。数传和姿态机动等任务作为约束条件或作为优化指标进行处理。
(2)空间望远镜的仪器开关机、星敏感器捕捉等一些观测以外的平台活动,简化为任务以外的固定等待时间参与任务规划。
(3)空间望远镜及中继卫星的轨道和天体星历等数据,作为仿真配置信息从外部输入生成。
(4)在满足阳照区太阳电池阵发电姿态约束的情况下,整个空间望远镜能够维持能源平衡。这点在生成规划结果后可以通过仿真进行校验。
2 巡天观测中期任务规划方法
2.1 约束模型
在进行观测规划时,首先需要明确空间望远镜在运行过程中受到的观测约束,将其分为以下几类。
(1)杂光约束。空间望远镜携带精密的天文探测载荷,载荷对成像时的杂光环境及镜筒入射的光照强度非常敏感。太阳的直接光照、月亮的反照辐射和地球大气杂散光若不加以规避或遮挡,直接入射到镜筒内会对光学载荷造成损伤。空间望远镜在成像时需要对这些强光源保持安全的规避角度。
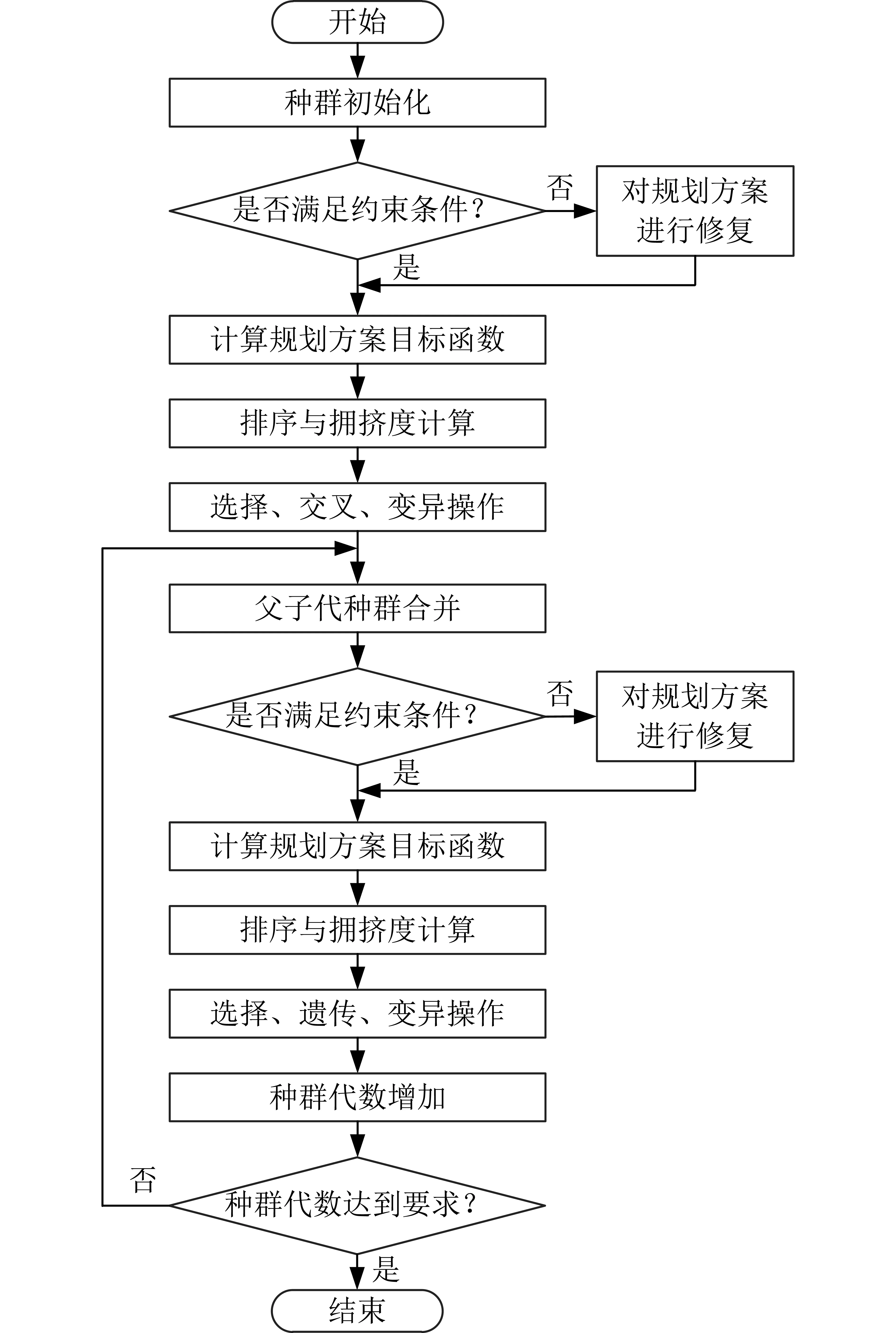
vaTvi (1) 式中:va为需要规避的目标指向单位矢量的矩阵表示;vi为光轴指向单位矢量的矩阵表示;θmin为最小规避角。 (2)阳照区飞行姿态约束。空间望远镜在轨运行时执行各种活动都会消耗电能,由太阳电池阵发电进行动态补充。为了保证太阳电池阵对日发电,其法线对日角度需要保持在一定范围内。在阳照区内空间望远镜必须保持准惯性对日姿态,从而保证太阳电池阵法线对日夹角满足发电要求。 vsTvt>cosθmax (2) 式中:vs为太阳光线方向单位矢量的矩阵表示;vt为太阳电池阵法线方向单位矢量的矩阵表示;θmax为两者最大夹角。 (3)空间望远镜在进行姿态机动时也需要遵守基本的动力学约束。 姿态角速度约束为:空间望远镜进行姿态机动时角速度ωq不能超过最大幅值限制。 |ωq|≤θωq=1,2,3 (3) 式中:θω为角速度的最大幅值。 (4) (4)南大西洋异常区(SAA)约束。SAA指的是南大西洋上空的地球磁场异常带,在SAA内空间望远镜携带的各种仪器可能会受到高能粒子的影响甚至损伤。进入SAA区时,空间望远镜需要关闭部分设备或调整仪器的工作模式,无法进行科学观测。 (5)数据传输约束。空间望远镜需要及时将观测任务得到的数据下传到数据中心,避免其储存耗尽。空间望远镜每天产生的科学数据需要保证约6h时间进行数据传输,这意味着通信任务有约1/4的覆盖率。传统的卫星任务规划系统一般将数据传输任务作为单独的任务进行规划,与观测任务一样占用可用时间。空间望远镜能够同时进行观测和数据传输,且出现数据传输任务窗口时需要经常执行数据传输任务,因此在进行规划时将数据传输任务作为约束进行处理。数据传输约束的本质是:①保证长时间数据传输任务的覆盖率;②限制连续最长不满足数据传输约束的时长。 覆盖率约束为 (5) 式中:Tr(τ)为空间望远镜在τ时刻进行数据传输的决策变量,取值为0或1;J为数据传输覆盖率;t0和t分别为开始计算时间和当前时间。 执行数据传输任务时需要满足的姿态约束为 vsatT(vsat-vm) (6) vtT(CsbCes(vm-vsat))>cosωt (7) 式中:vsat和vm分别为空间望远镜和中继卫星的J2000坐标系坐标;vt为中继天线安装指向的矩阵表示;θe为地球遮挡规避角;ωt为天线可转动角;Ces为J2000坐标系到空间望远镜轨道坐标系的变换矩阵;Csb为空间望远镜的姿态余弦矩阵。 上述约束条件将在预处理模块进行仿真计算,生成每个观测任务在时间轴上的可观测窗口。在任务规划过程中,还需要对其他规划变量约束进行判断,这将在第2.2.3节中阐述。 2.2.1 方法流程 由于巡天观测规划问题有约束条件复杂、任务多、属于非确定性多项式困难(NP-hard)问题的特点,在规划过程中取得全局最优解是非常困难的。但是,通过启发式算法能够寻找到次优解,从而满足工程实际需要[13]。遗传算法是常用的启发式算法,能够满足大规模、多目标任务优化的需求,但遗传算法本身不具备解决优化过程中出现的约束冲突问题的能力。本文采用混合优化算法来解决序列规划问题,即引入约束判断和修复的NSGA-Ⅱ算法。规划方法通过NSGA-Ⅱ遗传算法对序列进行优化,并在进化过程中应用修复方法确保序列满足约束条件。方法流程如图3所示。 图3 混合规划算法流程Fig.3 Process of hybrid planning algorithm (1)初始种群由输入任务组原始个体、输入任务组变异后的个体及随机生成的个体组成。这样能够充分利用长期规划的初始信息,并同时保证种群的多样性。 (2)编码方式采用整数编码。如图4为1个长度为6的染色体,染色体中基因的排列顺序代表了空间望远镜执行观测任务的先后顺序。考虑到巡天观测序列中任务之间存在先后关系,且每个观测任务存在很多观测窗口,采用整数编码方式的染色体能够更好地描述空间望远镜的姿态序列,便于进行约束判断及姿态机动代价计算。 图4 染色体示意Fig.4 Diagram of chromosome (3)方法采用精英保留策略。在生成下一代种群时先按照优化指标进行排序和拥挤度计算,将种群中的一定比例的优秀个体直接保留至下一代种群中,从而保证优秀个体的存留。 (4)进行交叉操作时,采用自适应参数选取。当目标函数需要最大化时,计算种群的平均适应度favg和最大适应度fmax。随机选取2个个体,按概率Pc进行交叉。越优秀的个体,被选中进行交叉的几率越高。被选中的2个染色体之间进行多点交叉,从而加快收敛速度。当目标函数需要最小化时则将其转化为最大化形式后计算,变异操作同样进行转化。 (8) (5)进行变异操作时,采用分层变异概率。对每个个体i按照概率Pm进行变异。变异时在染色体内随机交换不同基因的位置,从而进行局部搜索。适应度越高的个体,变异概率越小,能够更好保留较优个体。 (9) (6)经过交叉和变异后的子代种群与保留精英个体的父代种群合并后进行排序,并根据锦标赛法生成下一代种群[14]。 2.2.2 优化指标 规划方法需要能够保证空间望远镜完成尽可能多的巡天任务,提高其观测效率,同时需要最小化观测间姿态机动的时间代价。第1个优化指标f1为观测效率,定义为执行与观测有关任务的时间与在轨总时间的比值,反映的是空间望远镜在轨进行科学任务的时间占比。 (10) 式中:Ci和tdura,i分别为第i个观测任务的优先级和持续时间;ttotal为总规划时间;N为总观测任务数。 第2个优化指标f2为观测序列的总姿态机动代价。 (11) 式中:tmove,i,i+1为从任务序列中第i个观测任务指向到第i+1个观测任务指向进行的姿态机动消耗的时间。 为了保证空间望远镜在有限的观测时间内完成尽可能多的观测任务,观测效率将作为主要的优化指标。在进行非支配排序时,首先将保证个体的f1达到最大,再对f2进行分层排序。 2.2.3 约束处理 在执行优化方法时,需要对以下约束条件进行判断。 (1)时间窗口约束。空间望远镜对目标执行的所有观测任务都必须在空间望远镜对目标的可见时间窗口内完成,提前或超出可见时间窗口都被视为违反约束。 ∀Ti∈T→[(TStart,i,u-tstart,i,u)ξi,u≤0]∧[(tend,i,u-TEnd,i,u)ξi,u≤0] (12) 式中:Ti为第i个观测任务;T为全部观测任务构成的集合;TStart,i,u和TEnd,i,u分别为Ti的第u个可执行窗口的开始和结束时间;tstart,i,u和tend,i,u分别为Ti的第u个可执行窗口被空间望远镜观测的实际开始和结束时间;ξi,u为Ti在第u个观测窗口的决策变量,取值为0或1。 (2)观测次数约束。每个任务在规划时段内最多只执行1次。 (13) 式中:U为Ti的全部观测窗口集合。 (3)观测窗口持续时间约束。为了保证每次的观测任务都能够顺利完成,要求用于实施观测的可见时间窗口持续时间不能小于目标的可见窗口持续时间要求。 ∀Ti∈T→(tend,i,u-tstart,i,u)≥tdura,i (14) (4)姿态机动与设备准备约束时间约束。空间望远镜结束对Ti的观测之后,必须在Tj的时间窗口结束之前完成姿态机动和设备准备才可以观测。 tend,i,ui+tmove,i,j+Tm≤tstart,j,uj (15) 式中:tmove,i,j为任务Ti到Tj的姿态机动时间;Tm为观测载荷及平台的准备时间;ui和uj分别为任务Ti和Tj的实际执行窗口。 当出现不满足约束条件的个体时,需要进行修复操作,将采用贪婪算法寻找未进行安排的任务安排到当前出现冲突的位置,从而使染色体序列能够满足约束要求。 本文设计的中期巡天任务规划系统部署在地面控制中心,负责完成空间望远镜的中期观测任务规划,主要规划对象为以月为周期的空间望远镜巡天观测任务序列。如图5所示,中期观测规划系统包括轨道姿态仿真模块、任务预处理模块和任务规划模块。 图5 规划系统功能结构Fig.5 Functional structure of planning system 轨道姿态仿真模块为整个规划系统提供仿真支持,在进行任务可执行窗口判断时和执行任务规划的过程中,需要用到的空间望远镜轨道、姿态数据,姿态机动耗费的时间,各天体星历及观测目标方位等信息,都由轨道姿态仿真模块给出。 任务预处理模块将输入的观测任务组的目标黄经黄纬信息转化为规划系统可以处理的元任务。同时,它是规划系统中用于解决复杂约束问题、生成观测任务的可执行窗口的重要部分。空间望远镜需要执行的各种任务都受到复杂约束条件的限制,该模块通过在时间线上逐时刻对任务进行约束条件判断生成任务的可执行窗口,作为元任务的组成信息提供给系统进行后续处理。 任务规划模块是中期观测规划系统的核心部分。规划系统对预处理模块生成的包括观测信息和可观测窗口的元任务采用规划算法进行调度,为每个任务在时间线上安排具体的开始和结束时间,生成巡天观测系列。规划模块计算得到的观测效率、总姿态机动代价等优化指标,将作为评估任务规划效能的参考依据。 为了验证本文方法的有效性,通过STK11软件和Matlab2018b软件进行联合仿真。空间望远镜的轨道数据采用与天宫空间站同轨的轨道参数,任务组输入采用巡天观测长期规划给出的400个任务目标,限定对应的150000s观测时段。遗传算法相关参数设置为:种群大小200,交叉参数Pc1=0.6,变异参数Pm1=0.2,最大进化代数300,收敛判据为连续20代最优个体指标不变。采用本文方法进行观测任务规划仿真,规划结果如表1所示,图6为算法的进化过程。 表1 规划结果Table 1 Planning results 仿真结果表明:对输入的观测任务组合,在给定的规划时段内,本文方法能够顺利完成空间望远镜的观测规划任务,在遗传算法的进化过程中目标函数能够迅速收敛,从而求出观测序列的近似最优解。 图6 进化过程Fig.6 Evolution process 为了对规划方法性能进行分析,将本文方法与HXMT等卫星任务规划采用的传统遗传算法(GA)、模拟退火遗传算法(SAGA)进行比对。输入200个目标,设置GA迭代代数500,SAGA和NSGA-Ⅱ迭代300代。为了减小偶然性带来的影响,将各方法分别运行10次,仿真结果取平均值,对观测效率、姿态机动代价和运行时间进行比较。运行结果如表2所示。 表2 方法性能比对Table 2 Comparison of method performance 仿真结果表明:采用NSGA-Ⅱ算法的本文方法的优化指标、收敛时间和达到最优值代数均明显优于GA和SAGA。本文引入的精英保留策略、自适应交叉算子和分层变异算子提升了方法的寻优能力和搜索效率,有效节约了收敛时间,并得到了更好的规划结果。 中期观测规划面临的一个问题是,一段时间内的可观测目标数远大于实际可以完成的观测任务数量。为了提高观测效率,需要保证输入的观测任务组能够满足规划时的要求。超订购能够使得规划结果的观测效率得到提升,但会使得方法的搜索空间扩大,收敛效率变低,计算量和计算时间增长。为了分析输入的观测任务组对观测规划结果的影响,在限定的30000s规划时段内,分别输入超过空间望远镜观测能力的任务个数100,125,150,设置迭代代数300,运行10次进行仿真,仿真结果取平均值,如表3和图7所示。 表3 输入影响仿真结果Table 3 Inputs impact simulation results 从规划结果可以看出:当输入的观测目标存在适当余量时,规划结果的观测效率会得到提升。原因是:在规划过程中,约束冲突产生的空隙中可以经修复方法安排其他的观测任务,合适的多余任务目标提供了更广的选择池,能够填补空缺,从而提高观测效率。随着余量的增长,规划的收敛时间也会变长,但在可接受的范围内。 空间望远镜观测规划对于保障望远镜运行、提高观测效率具有重要意义。本文面向巡天观测中期规划问题,结合科学任务要求及工程实际情况,设计了中期任务规划方法。针对巡天观测规划问题任务规模大、约束条件复杂的特点,以观测效率和姿态机动时间作为优化指标,通过改进的遗传算法完成对观测序列的编排优化,并引入修复算法对复杂约束条件进行判断和修复。仿真结果表明:本文设计的规划方法优于采用传统遗传算法的规划方法,能够较好地解决巡天中期规划问题。后续会继续进行紧急任务重规划问题及不同层次规划系统间信息交互对整体规划结果影响的研究,更好地为空间望远镜执行巡天观测任务提供参考。
2.2 应用遗传算法的规划方法设计



3 方法验证与分析
3.1 规划系统设计

3.2 规划方法验证


3.3 方法性能分析

3.4 输入影响分析

4 结束语
