基于BIM与三维扫描的建筑物智能拆除方法研究*
2023-05-25王立波林重才韩锦文
王立波 林重才 韩锦文
(安阳工学院土木与建筑工程学院, 河南安阳 455000)
0 引 言
近年来,随着我国城市化进程的不断推进,建筑拆除工程活动不断增长。2018年,我国产生的建筑固废达到15.9亿t[1],其中超过60%来源于既有建筑的拆除,并保持约10%的年增长率[2]。拆除产生的建筑固废的处理也带来了诸多环保和安全问题,包括粉尘污染、有害物质[3]等。因此,应用生命周期理论,在建筑物的拆除工作中,从拆除前调查、拆除方案制定、现场拆除到拆除后的建筑固废处理全周期中,寻找高效、低碳、安全的建筑拆除与固废消纳的方法,逐渐成为建筑行业研究与应用的关注点。
在欧洲,成熟的建筑拆除流程主要包括:拆除前调查、拆除计划与实施、固废管理[4]三个阶段。但在我国,建筑拆除的相关研究与实践仍聚焦于对现场拆除方案的数值模拟和施工组织管理[5-7]:通过既有手段对结构构件进行检测与评估,来确保结构物按照预期方案顺利倒塌[7],而对于建筑拆除前的调查仍处于起步阶段。文献[8-9]指出,我国在2001—2010年间拆除的建筑大部分寿命仅为30年,其中始建于20世纪80年代[9]的建筑所占比例最高。由于当时设计标准与施工管理水平的不足,既有建筑的设计资料大多已经无法获得;同时,随着服役时间的增加,材料劣化与荷载效应导致的结构变形也使得待拆结构与有限的设计资料不符。因此,获得待拆结构的准确、详细信息,是执行安全、高效的建筑拆除的基础。
另一方面,我国的研究学者对于建筑拆除产生的固废处理及资源化的研究课题,主要集中于如何提升再生固体废物的材料学特性和工程应用价值,如:毛以卫[10]、彭立港[11]等研究了再生骨料新旧界面参数(ITZ),探究了界面参数与再生粗骨料取代率、水灰比、力学及耐久性能的相关关系;刘锟[12]等从再生混凝土的宏观性能与微观结构上,分析并提出了再生混凝土未来的发展趋势;田青[13]等分析了化学激活、热激活、机械激活等几种再生微粉的主要激活的内在机理,并指出了现阶段再生微粉激活研究存在的问题。然而,溯其根源,高效有序的建筑固废管理才能生产高品质的再生骨料及微粉,从而才能提高再生产品的质量、推广其应用场景。如何从建筑的全生命周期角度,实现建筑物从拆除至固废资源化的全过程管理:即以固废资源最大化为导向,保障建筑拆除的安全、高效、环保、有序,促进建筑固废的再利用与再循环,是目前亟待解决的行业问题。
随着BIM、三维扫描等信息化技术在建筑领域的深入融合应用,一种以信息化的方法,实现智能、安全、可持续的建筑拆除工程,并为建筑固废资源化提供先行保障为特点的拆除方案被提出——“智能拆除”。它旨在以三维扫描为数据采集手段、点云逆向建立的BIM模型为数据基础,借助BIM的可视化、信息化、集成化优势,为建筑物拆除和固废管理的全流程管理提供智能化解决方案。相关的研究已经证明,BIM应用于建筑拆除及固废管理优势明显[2]。Cheng等使用BIM技术实现了建筑固废的分类、体量计算和处置策略制定[14];于向东等在斜交跨线连续梁快速拆除工程中,使用BIM技术对拆除过程进行了模拟[15];黄玮征等在跨内河航道桥梁拆除工程中,应用BIM技术预先对施工方案进行了模拟,论证了施工方案的合理性[16];罗春燕以BIM为基础,开发了适用于建筑拆除工程的建筑固废决策管理系统[17]。同时,作为一种既有建筑的信息采集手段,三维扫描能够帮助获取待拆结构精确的几何与纹理数据[18-20],为后续拆除方案的制定和固废管理提供数据基础。因此,融合三维扫描与BIM技术进行建筑拆除,在城市更新和工业信息化的迫切需求下具有先天优势。
在此背景下,本文结合BIM和三维扫描技术,以旧城改造过程中既有建筑物的拆除工程为案例,提出“建筑物智能拆除”的系统框架:首先使用三维扫描技术获取既有建筑的精确几何信息,并提出了一种基于三角锥靶标的点云精确注册方法;然后,开发了一种针对住宅建筑的点云处理算法,以重建其BIM模型;紧接着,基于该BIM模型,分析了建筑拆除方案的安全性和经济性。最后,依据上述方案,以成都市某旧城改造项目的一栋砖混结构建筑为例,进行了全流程试验,以验证所提方法的可行性。
1 基于BIM与三维扫描的建筑物智能拆除框架
目前的建筑物拆除实践中,工程师或管理者多聚焦于现场操作,而时常忽视前期调查、拆除计划,进而为后续资源化利用带来多重障碍(如多种类建筑固废的分离、高质量再生骨料的制造等)。借鉴于欧美较为成熟的“选择性拆除”[21]体系,结合BIM信息化集成的优势,本文提出以下建筑物智能拆除与建筑固废管理系统。系统具体模块如图 1所示。

图1 基于BIM的智能拆除与固废管理系统框架Fig.1 The framework of intelligent demolition and building solid waste management system based on BIM
1.1 点云采集
为获取详尽的待拆结构信息,制定安全可持续的拆除方案和固废处置策略,本文使用三维激光扫描采集待拆结构的点云信息,进而获取精确几何参数和材料纹理。
在大型的土木工程结构扫描中,不同设站点之间的点云注册是一个棘手的问题,特别是在精度要求较高的情况下。目前普遍使用的是球形靶标,将它放置在两个设站点之间的目视范围内,作为相邻两站点云之间的共同特征来进行后续的点云注册。然而,大型结构的扫描过程中,由于扫描距离差异,一个标记球体上的点云数量可能是稀少的;且由于球体的特性,过大的激光反射角将引起球体表面的点云漂移[22],产生随机噪声,不利于点云的精确注册。
为克服以上问题,本文设计了一种新的三角锥形标靶:该标靶由3块可活动的板组成,各块板之间的角度可以自由调节,以适应不用扫描距离和角度(图2b)。在三维空间中,3个互不平行的表面可以确定一个独立坐标系。因此,理论上只需在每相邻两站之间使用一个三角形靶标即可完成点云的精确注册。
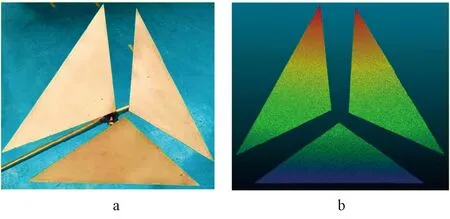
a—三角锥形标靶; b—标靶的点云。图2 三角锥形标靶示意Fig.2 Schematic diagrams of triangular conical target
在点云注册过程中,相邻点云集A和点云集B含有同一个三角锥标靶面。点云注册的目的是,将注册点云集B的坐标系转换到与参考点云集A一致。具体步骤为:1)首先,将三角锥形标靶中的共同面分离出来,并计算其最佳拟合平面;2)紧接着,使用ICP算法计算两个最佳拟合平面的旋转参数(旋转矩阵[R]和平移矩阵[T],如式(1)),通过迭代计算使得两个拟合平面的距离函数F(对应点之间距离的平方和)取得最小值,进而使得两个点云集A和B精确注册。
[CA]=[R][CB]+[T]
(1)
其中:

式中:α,β,γ分别是绕x、y、z轴的旋转角;tx,ty,tz分别是沿绕x、y、z轴的平移距离。
由于该三角锥形标靶各个不同面是互不相交的,因此在大体量点云中很容易被分离出来;同时,空间平面的检测与拟合效率要比空间球面更高。因此,使用该方法在理论上可以提高点云注册精度和效率。
1.2 几何参数提取与BIM重建
为建立待拆结构的实时精确BIM模型,在点云的基础上进行逆向重建是许多研究与实践采用的思路。为此,本节提出了从点云中提取构件几何参数的MATLAB算法。其具体流程为:
1)点云分割。由于采集的点云带有三维空间坐标,而建筑物在高度方向具有显著特征,因此,本文按照点云Z坐标的差异,将三维点云按照结构楼层分割为N个集合,即:
{P}={Pi=(xi,yi,zi)∈R3|i=1,2,…,N}
N=楼层数 (2)
2)点云投影与聚类。在每个单独的点云集合Pi中,将所有点投影至xy平面,得到各层的平面点云集合{Pi,xy}={(xi,yi)∈R2|i=1,2,…N},这个集合反映了建筑物在该层的平面布置和几何,包括墙、柱等构件的边线;而后,在每个平面点云集合{Pi,xy}中,采用聚类优化算法[23-24]将不同构件的点云进行统计分类,以得到单独构件的点云集合{Pm,xy}:
{Pm,xy}={(xi,yi)∈R2|i=1,2,…,m}
m为构件数 (3)
3)特征线检测。在每个构件的点云集合{Pm,xy}中,使用基于上述点云对该构件边线(或者轴线)的曲线进行检测和拟合,以得到该构件的几何特征和空间位置。由于本文中的特征线为梁、板、柱、墙的边线,且均为直线,检测较为简单,无需使用复杂的特征线检测算法[25]。其具体方法如图3所示。
4)特征线拟合与几何计算。基于上述步骤中检测到的特征点集合,通过最小二乘法拟合曲线(式(4a)),计算上述曲线的长度L,即为该构件的长度;计算各构件内外边线之间的平均距离D,即可得到构件的宽度;

图3 特征线检测算法流程Fig.3 The flowchart of feature line detection algorithm
f(xk)=a1xm+a1xm-1+…+amx+am+1
(4a)
(4b)
(4c)
式中:m的取值根据特征线的具体特征而定。同理,在xz、yz平面内分别运行此步骤,即可得到建筑物完整的几何参数。表 1为上述步骤的伪代码。
基于上述方法,可以从点云提取结构的几何参数,并最终形成各类构件几何参数的Excel表格,以通过Dynamo参数化建模工具建立结构BIM模型。大量研究表明[26-28],使用Excel参数表驱动Dynamo建立结构BIM模型已十分成熟,限于篇幅,本文亦不再详细叙述其具体步骤。技术上讲,由点云几何建立的BIM模型,将有别于从二维图纸“翻模”而得的BIM模型,具有更高精细度,与现场高度契合,更有利于工程师详细了解结果状况,制定拆除计划和固废管理策略;工程角度,相比于人工测量,使用三维扫描的重建方法,多数操作将由机器替代,在很大程度上减少人工投入的同时,获得人工测量无法比拟的完整性数据。
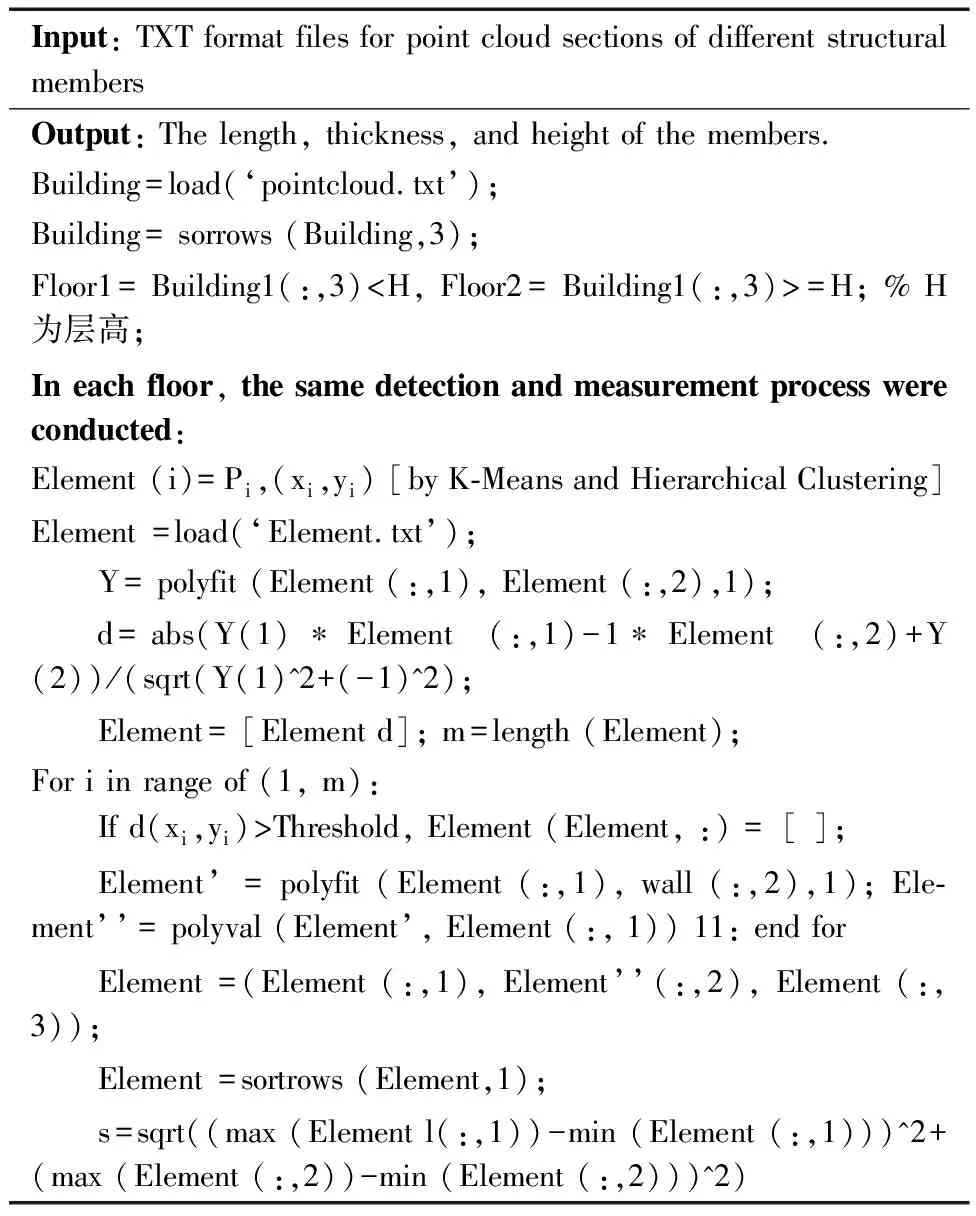
表1 点云处理与几何计算伪代码Table 1 Pseudocode of point cloud processing and geometric calculation
1.3 拆除计划
1.3.1拆除方法选择
基于上述预调查信息和精细化BIM模型,结构各部分的资源化利用潜能得到判断,各构件、材料的再利用策略得以确定;同时,对应的详细拆除计划可以被制定。
对于城市建筑物而言,主要的拆除方法有:人工拆除、机械拆除、爆破拆除。其中,人工拆除主要用于低矮建筑物的拆除工作或其他拆除方法的预先处理与辅助工程,节能环保但拆除效率低,工人安全得不到保障;爆破拆除多用于大型结构物的快速拆除,高效、经济,但该方法产生的噪声、扬尘、有害气体和地震效应[5-7,29],具有不可忽视的环境影响。相比较而言,机械拆除方法允许各种类型机械装备配合使用[30-32],能够最大程度地保留完整构件、减小倒塌范围,降低环境影响;同时又能减少人力投入,保障工人安全,有利于建筑固废的后续再利用。
拆除流程的总体原则[29,33]是,先切断(水、电、气、管道等)、先上后下、先内后外、先附属后结构。同时,机械拆除也包含两种不同拆除顺序:1)正向拆除:即逆施工顺序,按照结构的荷载传递路径,自上而下逐步拆除。该方法无需或仅需少量临时支撑结构,传力明确;2)逆向拆除:即按照建筑施工顺序,自下而上进行拆除施工。该方案需要在拆除底层结构时有足够的临时支护,以提供竖向支撑能力和抗侧能力;同时该支撑体系也需要具备竖向下降功能[34]。相比较而言,正向拆除施工简单、传力明确,但需要高空作业和垂直运输;逆向拆除虽然需要额外的千斤顶系统,操作困难、成本较高,但该方法将作业平台转移至地面,减少了场地组织难度和机械投入,适宜在城市中心场地狭小的地方采用。因此,实际操作中应依据具体结构特征和拆除要求来确定具体方案。
基于精细化BIM模型,拆除方法和拆除顺序可以通过三维模拟进行优化和确定。在BIM模型中,对整个结构按空间区域、平面区域、单独构件的层级划分层次,按照优先级将各空间区域、平面区域和构件赋予时间依存信息,在虚拟环境中按照预定方案和拆除顺序进行模拟,找出施工交叉点和矛盾点,反过来对拆除方案、顺序和进度计划进行调整优化,从而得到最优的拆除计划。
1.3.2安全性评估
在确定拆除方案时,预先确保方案的安全性是至关重要的工作。然而,多数建筑物在服役多年后,设计文件的缺失,以及服役期间产生的倾斜、形变、材料退化等现象,给拆除方案的安全性带来了巨大挑战。
本系统中,得益于BIM的三维可视化及其与有限元结构分析平台的良好互操作性,通过转换接口[35-37]将BIM模型转换为有限元(FEM)分析模型,可以快速建立待拆结构物的力学计算模型;接下来,按照前述步骤制定的拆除方案,分阶段进行全过程的受力分析,通过研究结构物的响应来判断拆除方案的安全性[29,33],并依据计算结果对拆除方案和顺序进行调整优化,最终确定安全、高效、节能、环保的拆除方案。综合多种模拟方法,满足安全的建筑拆除方案优化思路如下:
(5)
式中:P为结构拆除顺序;S(P)为当前拆除阶段的结构应力;S(c)为控制应力;U(P)为当前拆除阶段的结构变形;U(c)为控制变形;W(m)为当前拆除阶段的材料损失率。
由1.1节可知,本文的BIM模型带有建筑物实时状态信息,通过将BIM转化为对应的有限元分析模型,其构件尺寸、节点形式和连接状况、材料属性仍然保留。相较于传统方法从原始设计文件和现场人工测量数据[38]中建模,由BIM模型直接转换得到的FEM模型,其数据来源更为完整可靠;且转换得到的FEM模型为实体模型,可以根据所需精细程度自定义模型的精细程度。这从信息源和精细程度上均提高了有限元模型的准确性,从而进一步确保了分析拆除方案的安全性。
1.4 建筑固废管理
1.4.1材料分类与数量统计
固废管理与资源化的总体原则是,尽可能提高固废回收利用率,并尽可能按照不同材料特点制定精细化利用策略。而预先确定待拆建筑物的材料类别和对应体量,是制定回收处置方案的前提。BIM模型为我们提供了建筑物固废材料分类与体量计算的可能。BIM模型建立时,构件按照功能进行了分类,包括门、窗、墙、柱、梁、板等,其对应的材料种类及特性也已经被记录在构件本身的属性信息中。通过BIM平台的计算模块,可以快速计算整个待拆结构的材料种类及其对应数量[14]。值得注意的是,从BIM模型中计算得出的材料体积,并非最终需要处理的材料数量时,有以下几个因素会对其产生影响:1)转运过程中的损耗;2)粗处理造成的体积变化;3)单位转换时的密度取值。考虑三者的综合影响后,本文引入体积变化系数Fv[14],并根据式(6)计算最终的待处理建筑固废数量:
Mi=Voi×Fvi×Di
(6)
式中:Mi为材料i的待处理工程量,t;Voi为从BIM中提取的材料i的体积,m3;Fvi为材料i的体积变化系数;Di为材料i的平均密度,kg/m3。
1.4.2处置方案选择与成本估算
为进一步促进建筑固废再利用,对于每种不同的材料类型,需要依据其退化状况和材料特性制定不同的回收与处置方案,并依据对应数量计算相应的处置成本,以便工程管理人员实现精细化管理。主要的处置方法包括:回收(直接)再利用、回收(处理后)再利用、选择性回收、填埋[39]。由待拆结构产生的建筑固废处理所产生的费用按照下列方法计算。总费用分为4类[40-41]:1)收集费用。产生于拆除现场的粗处理和转运;2)运输费用。表示从拆除现场运输至处理工厂的费用;3)回收处置费用。表示建筑固废回收处置所需要花费的费用,本例中用回收处理厂的报价作为参考;4)填埋费用。当材料性能无法满足回收利用的要求时,须进行填埋处置,该过程产生的费用属于填埋费用。按照式(7)可以计算出对应的处置成本C:

(7)
式中:Mi为材料i的待处理工程量,t;Ci为材料i的单位收集费用,元/t;Ti为材料i的单位运输费用,元/t;di为对应运输距离,km;Ri为材料i的单位回收处理费用,元/t;Li为材料i的单位填埋费用,元/t。
在BIM提供了详细工程量数据下,不同的处置方案成本比较模型是容易实现的。通过对不同方案的成本比较,可以在考虑经济成本、环境效益双重因素下,制定各项材料的收集和存放位置,并确定后续运输、处置方案,为整个拆除项目提供经济性指标参考。
2 工程实践
为阐明本文所提出的智能拆除框架的过程,作者以西南地区某旧城改造项目中一栋砖混结构的拆除工作为例,详细介绍了基于BIM的智能拆除与固废管理实施流程。该建筑始建于20世纪80年代,已经使用近40年,图纸和设计文件早已缺失,而当地政府希望以该建筑为例,探索一个智能与可持续的建筑拆除新方法。
2.1 数据采集与BIM模型重建
在本项目中,研究人员使用3D地面扫描仪进行结构物的调查和数据采集。整个采集工作主要分为3部分:1)建筑物外立面点云采集。在建筑物周围,选取合适的设站位置及三角锥标靶设置位置,使用扫描仪对整个建筑物外立面进行扫描,其原则是:尽可能减少设站次数以降低拼站误差,同时保证每相邻两站点云间包含同一个三角锥标靶面。2)建筑物内部点云采集。建筑物内部按照空间和功能分区,分别采集各区域的完整点云。3)内外连接处点云采集。为保证建筑物内外点云的融合,需要对建筑物内外连接处(如窗、门)进行加强扫描,以保证在连续两站点云中包含同一扫描对象的特征点云,以作为后续点云拼接的参考点。值得注意的是,由于扫描仪的视角限值,结构转角处和内外连接处需增设站点对相邻两个平面进行点云加强采集。
在建筑物完整点云获取后,使用1.1节中的方法进行点云注册,将各站的点云数据进行全局注册、拼接,得到建筑物的三维点云模型(图 4a)。紧接着,使用1.2节的点云处理和几何参数提取方法,对建筑物原始点云进行点云投影、聚类、特征线检测等处理,得到各层的几何参数;最后,使用Excel参数表格驱动Dynamo重建该建筑物的BIM模型。图 4b、4c展示了本项目特征线检测结果,以及依据几何参数重建的BIM;图 5以2层点云为例,详细展示了点云投影、聚类、去噪及特征线的检测和拟合过程。
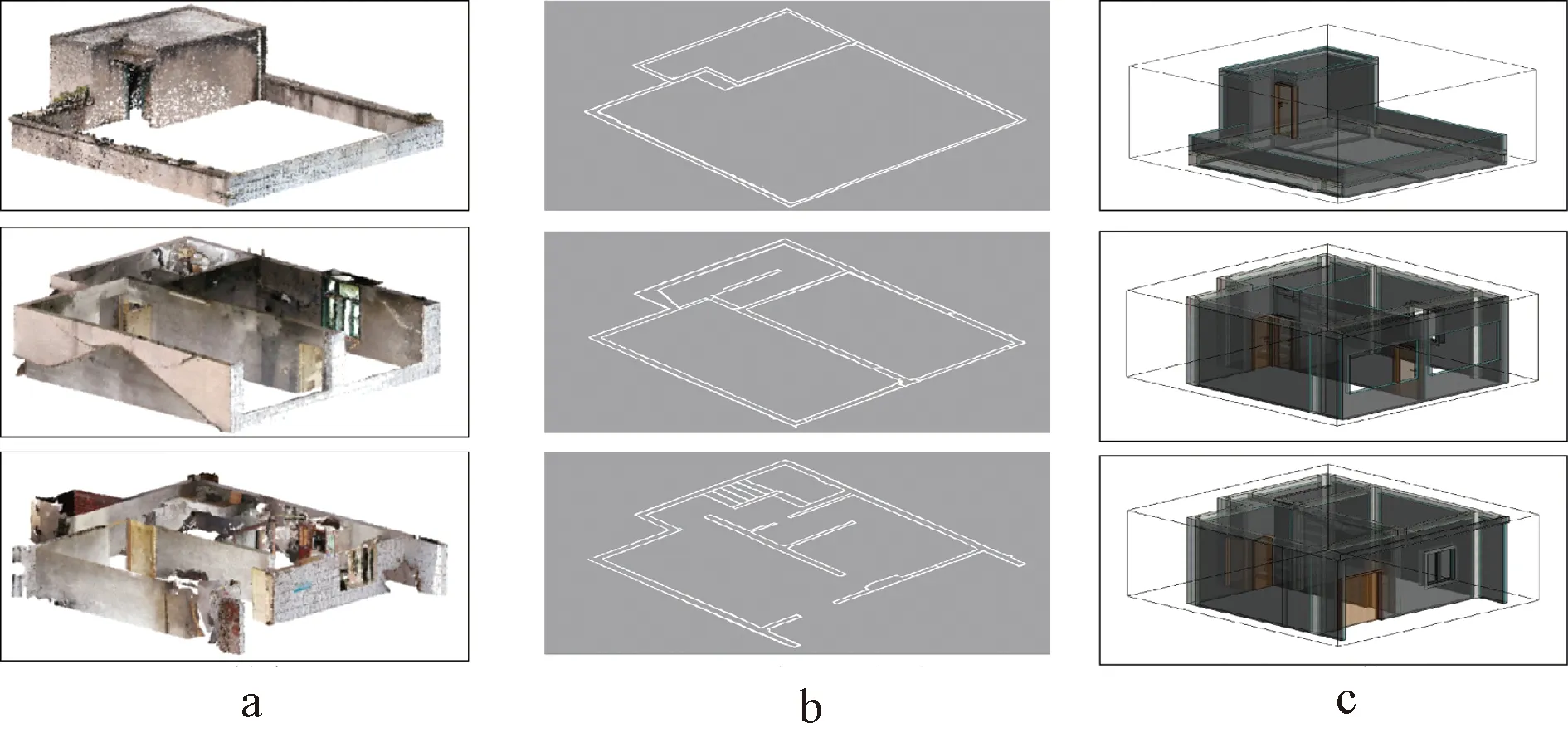
a—原始点云; b—特征线检测; c—BIM模型。图4 点云处理及BIM重建Fig.4 Point cloud processing and BIM reconstruction
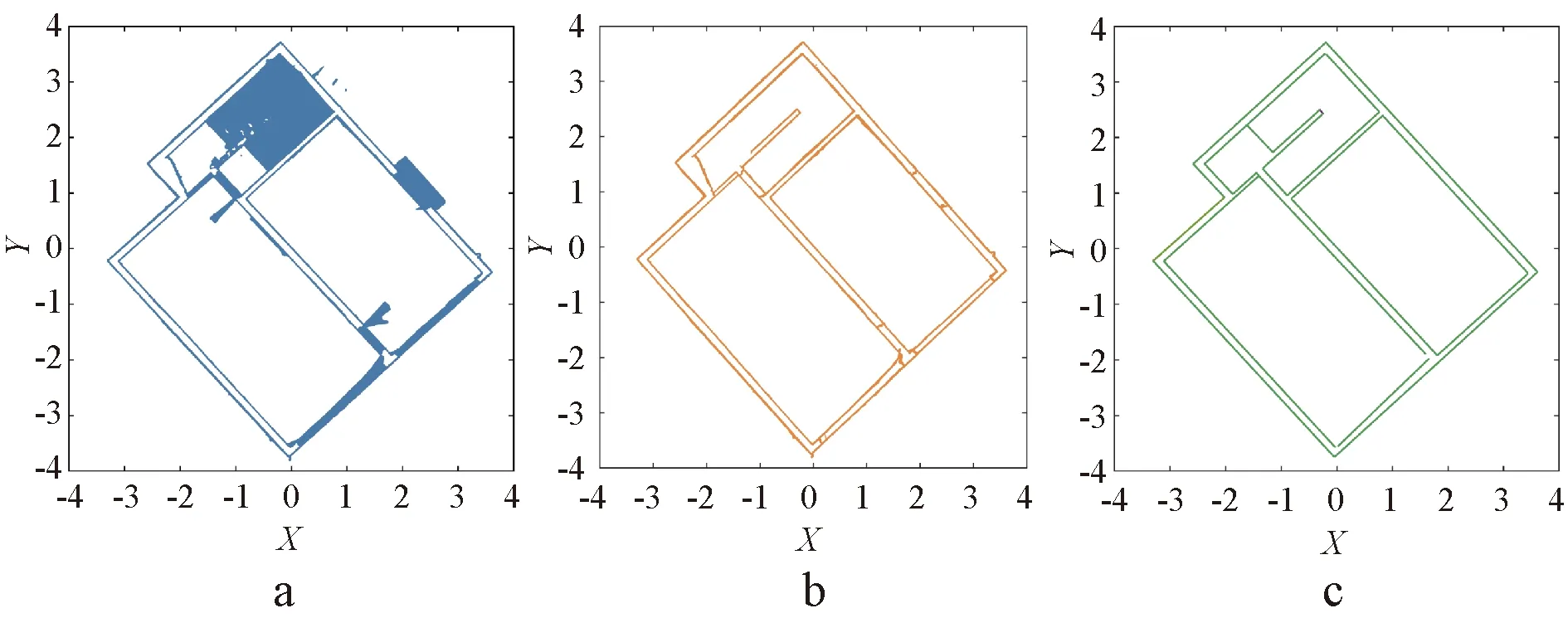
a—点云投影; b—点云聚类、去噪; c—特征线检测、拟合。图5 点云处理结果(以二层为例)Fig.5 Point cloud processing results (taking the 2nd layer as an example)
2.2 拆除计划
受限于现场条件和环境影响要求,本文选择机械拆除、辅以人工的拆除方法。如图 6,将待拆除构件按照类别分为不同集合:门、窗、瓷砖、楼梯间、墙、板、楼梯、框架梁、框架柱、基础等,并分别赋予必要的工作时间;在Naviswork的可视化施工模拟平台中,可以对整个拆除方案按时间进度进行模拟。
本文依据文献[29,33]的方法,将整个拆除过程分为16个小项,4个大项,分别为:1)准备工作。包括正式拆除前期的场地清理与规划、水电气等能源截断、有害物质清除以及人员和机械准备;2)非结构性构件拆除。对门、窗、墙砖等非结构性构件进行人工+机械拆除。这些构件拆除工作相对简单,且部分具有回收利用价值;3)结构构件分层拆除。由于该结构为服役多年的砖混结构,按照正向拆除顺序,按照荷载传递路径,从顶层楼梯间开始至底层分层拆除;每层按照墙、板、楼梯的构件顺序进行拆除;每个构件先拆除其表层瓷砖、砂浆混凝土,再拆除其内部混凝土、烧结砖等,并暂时堆放在对应各楼层楼板上,待整层全部拆除结束后再转运至临时堆放场地;4)框架柱拆除。待所有其他构件全部拆除结束后,使用大型机械对框架梁和柱进行拆除。模拟结果表明,楼梯及其隔墙的拆除应调整至各楼层隔墙与楼板拆除之后最后进行,否则无法为人工、材料和机具转运提供通道和临空作业保护。进度模拟表明,在人员固定的情况下,数据采集、准备工作和非结构性构件拆除工作可以穿插施工,以提高施工效率。按照标准工时计算,该拆除项目需要耗时5个工作日(从前期准备至材料转运至回收处理厂),其中,楼层构件的拆除和临时存储耗时接近2.5个工作日。虽然该方案在施工效率上稍有牺牲,但实现了各类材料的精细化分类拆除,推动了后续建筑固废的资源化利用的高效进行。
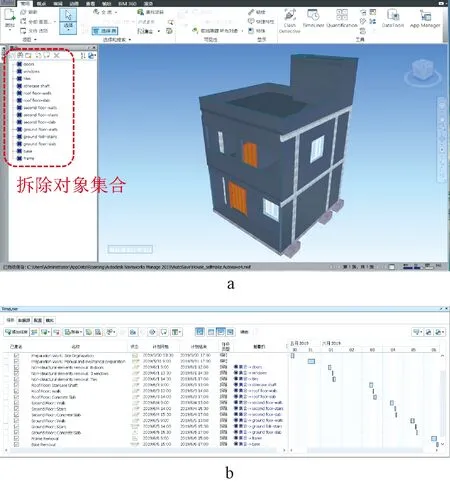
a—拆除方案模拟; b—进度计划制定。图6 拆除方案与进度计划模拟Fig.6 Deconstruction scheme and schedule simulation
2.3 安全性评估
ABAQUS作为经典有限元分析软件,与Revit有共同的内核ACIS,均支持.sat格式的读取,因此具有良好的交互性[36-38]。但是,由于.sat本身仅存储ACIS的点、线和实体,目前仅支持Revit以Part的形式进行导出,然后在ABAQUS中进行修正[36-37]。当结构由多种复杂构件组成时,这种传输方法反而会增加修正时间、降低传输效率。因此,本文基于Revit API中的应用程序接口,在Revit中过滤和提取所有构件类型、材料类型、构件编号和位置,然后将其写入INP文件的相应字段下,整合并检查正确性后写入ABAQUS以实现Revit模型至有限元分析模型的快速转换[14,36],来避免重复建立有限元模型。其转换方法、数据流如图7所示。
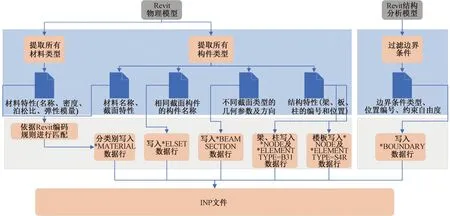
图7 Revit模型信息提取方法流程Fig.7 The flowchart of Revit model information extraction method
由于在Revit模型中,结构的荷载状况难以准确获取[42],因此需要在ABAQUS中,按照实际情况设定荷载情况,检查边界条件,并按照预定义的拆除方案设置分析步后进行仿真模拟。特别的,每层前序拆除的临时堆放物,根据BIM模型中的体量和密度,换算为相应的恒载均匀施加在楼板上:例如,当拆除二层楼板和侧墙时,将二层以上已经拆除的侧墙和楼板按其重力换算为均布荷载施加于二楼楼板[43]。机械振动按照其自重的1.2倍施加于楼层侧墙。表 2列举了本例中必要的材料特性,由现场工程师使用无损检测方法获得。如图 8,顶楼拆除阶段,最大主拉应力为0.210 8 MPa,出现在二层楼板跨中位置,最大形变量为1.43 mm;二层拆除阶段,最大主拉应力为0.147 6 MPa,出现在一层南面圈梁跨中位置,最大形变量为3.69 mm;结果表明,其最大拉应力和形变均在混凝土抗拉强度和可控形变[43]范围内,不会产生突然倒塌现象,上述拆除方案安全。
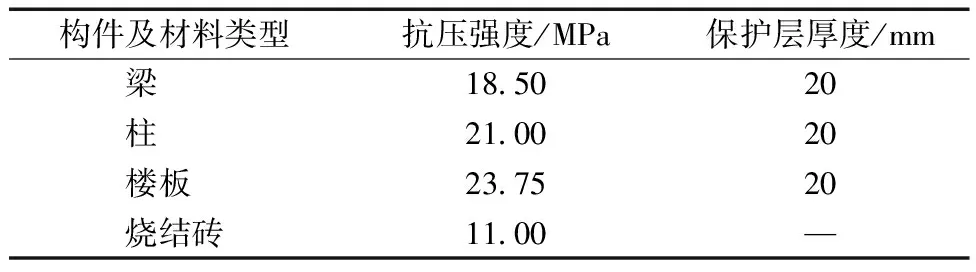
表2 待拆建筑物材料特性Table 2 Material properties of the buildings to be demolished
需要注意的是,本方法仅对该案例中的梁、板、柱和墙单元的转换进行了试验分析,证明了其有效性。但由于本案例结构简单,包含结构类型少且需要提取的数据量和类型不大,该方法仍具有限制性,对大型、复杂结构的信息流转换仍需进一步研究。
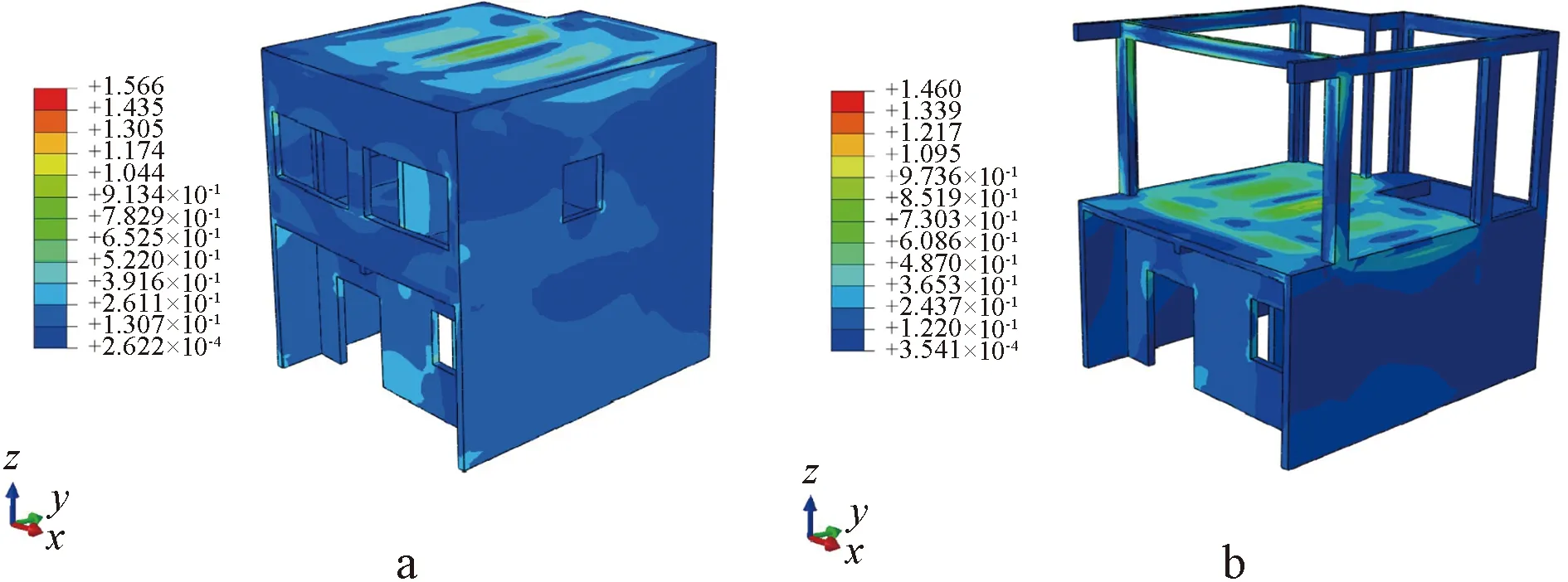
a—顶楼拆除阶段;b—二层拆除阶段。图8 不同拆除阶段的应力云图 MPaFig.8 Stress cloud maps of different demolition stages
2.4 经济性评估
在本模块中,结构构件按照其材料类型进行分类和统计,主要包括:混凝土、金属、木材、玻璃、砌体砖、瓷砖。对于BIM中每个被选中的构件,Revit的材料参数函数可以自动计算该构件组成材料的数量,并按照类别累加。例如,本例中的室内门由木材、金属、玻璃3种材料组成,而该函数会分别提取这3种不同材料的类型、体积参数。本例中对应材料类型、体积及待处理数量如表 3所示。
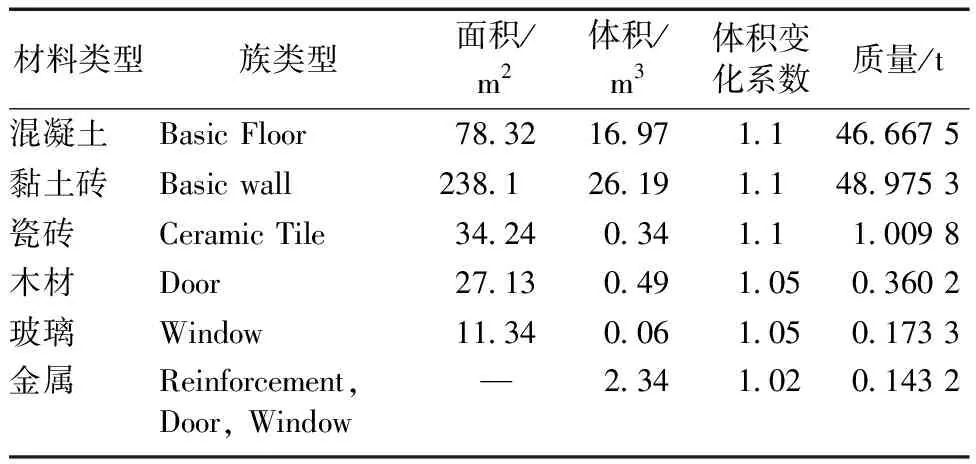
表3 材料分类与数量统计Table 3 Material classification and quantity statistics
为评估和确定各类材料的不同处置方案,本文通过比较3个典型方案下的经济成本:1)回收;2)填埋;3)选择性回收,其结果如图 9所示。经测算,若将上述各类型固废全部回收处置,总成本达到12 674.30元;其中,混凝土和黏土砖在专业处置工厂回收处置阶段的成本分别占据29%和31%;若将上述所有固废进行填埋,总成本仅为3 905.02元;其中混凝土和黏土砖的现场收集各自占比16%,填埋成本各占比25%左右。当选择将再利用价值高的混凝土、木材、玻璃、金属进行回收,而对回收价值相对低的黏土砖、瓷砖进行填埋处理时,其总成本为9 435.07元;其中,混凝土的回收和黏土砖的运输成本占据39.5%和20.7%。值得注意的是,该比较模型中,拆除现场至回收站的运输距离为35 km,至填埋现场的距离为5 km。
基于上述比较分析可以看出,将该项目全部建筑固废回收处理成本较高,而全部直接填埋又会造成严重的环境负荷;综合分析下,同时考虑降低施工成本、并最大化建筑固废的回收利用,本文决定采用选择性回收方案,即将混凝土、木材、玻璃、金属转运至固废综合处理工厂进行回收处置,将黏土砖、瓷砖运输至另一公路工程施工场地埋场处理。其最终的各类材料的不同处理过程费用见表 4。由计算结果可知,整个建筑物的固废处置费用总计约9 435.07元,其中混凝土的回收处置费用占据了整个过程的大部分成本(39.5%),这是由于当地的建筑固废产业链尚未形成,少量的几家企业缺乏市场竞争导致的价格偏高;同时,由于回收处置的单价偏高,钢筋等金属的回收处理成本仍不容忽视,尽管在本例中其数量较少、所占用处理成本较小。另外,由于该建筑为砖混结构,黏土砖的填埋成本也不容忽视。
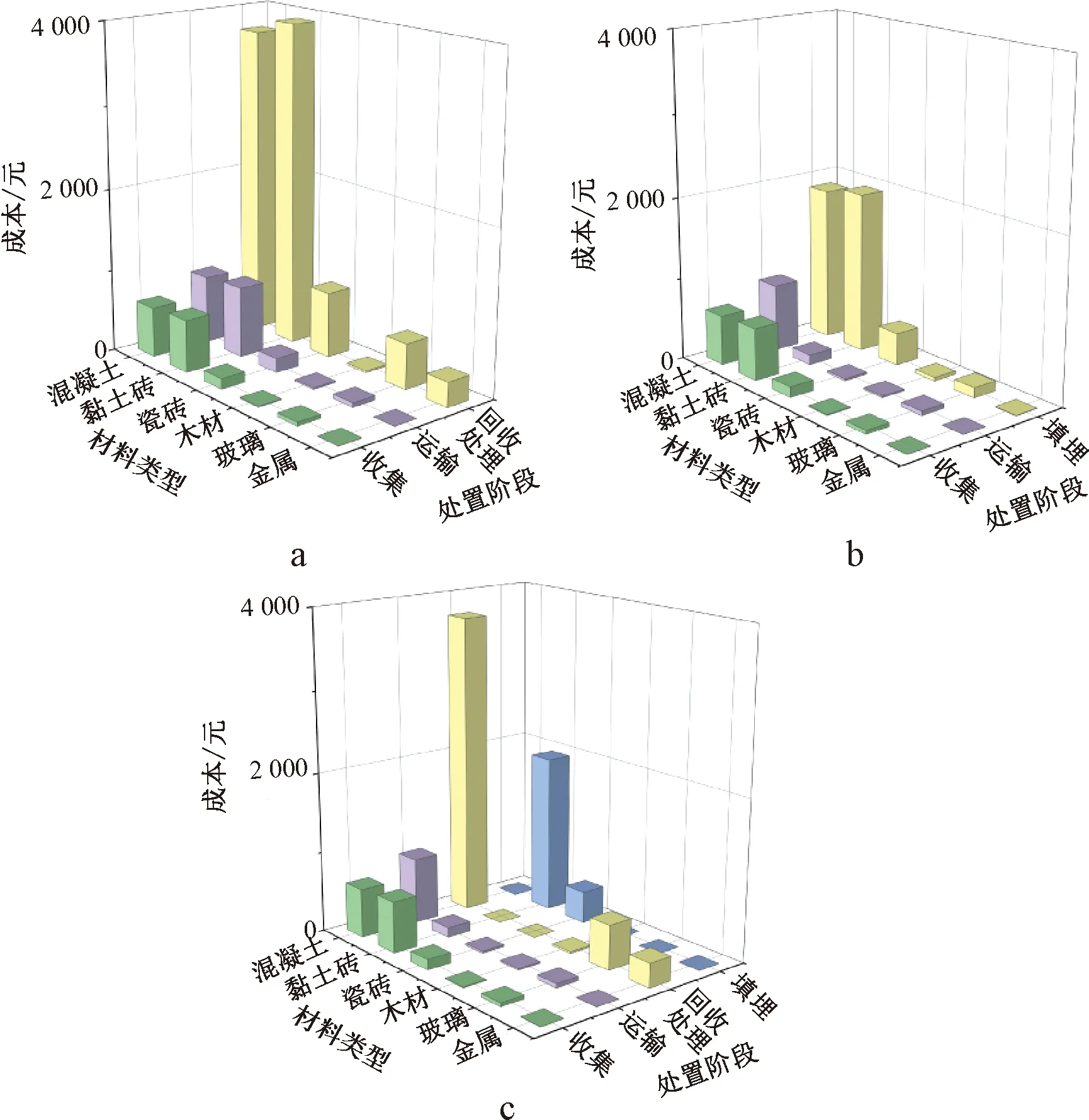
a—回收;b—填埋; c—选择性回收。图9 3种不同处置方案的成本分析Fig.9 Cost analysis of three different disposal options
总体来讲,基于精细化BIM模型,本框架实现了建筑固废的材料分类、算量,并基于该数据,对各类固废的处置方案的相应成本进行了详细估算。该方法能够为工程承包商的成本控制提供参考,也更有利于生产出高质量的固废再生产品。

表4 各类建筑固废的处置费用计算Table 4 Calculation of disposal costs for all types of building solid waste
3 结 论
在分析了我国建筑拆除和垃圾管理现状的背景下,提出了基于三维扫描和BIM的建筑物智能拆除与管理系统,对建筑物拆除过程中的预调查、拆除计划、固废管理提供了智能化的解决方案。以我国西南地区某建筑物拆除项目为例,应用该系统对该建筑物完成了相应的数据采集、BIM模型创建、拆除方案与计划模拟、安全性和经济性评估。总体来说,该方案具有以下优势:
1)提出了一种基于三角锥形标靶的建筑结构点位精确注册方法,降低了圆形标靶的点云散射飘移问题,提高了建筑结构多站点云的注册精度;
2)采用开发的相关算法,计算了建筑物的几何参数,并据此重建了待拆结构的完整BIM模型,降低了人工测量与调查时的安全威胁,并提高了数据的真实性、完整性和可视化程度;
3)BIM为建筑物拆除的方法选择、顺序确定和进度计划提供了可靠的三维可视化工具,可以对计划中的不合理单项进行顺序调整、工期优化,以获得最安全、高效的拆除方案;
4)基于BIM可快速建立待拆建筑物FEM模型,对各拆除阶段进行力学分析计算,确保拟定拆除方案的安全性;
5)BIM模型提供了精确的材料分类、数量统计功能,基于此可实现拆除后各类固废的分类收集、处理、转运、填埋等成本计算,为实现经济、环保、资源最大化的固废管理提供了更为精细化的数据。
本文提出的基于BIM的建筑物智能拆除方案,能够提升其信息化、可视化程度,并为拆除方案制定和后续建筑固废的处置提供精细化管理工具,有利于实现既有建筑的安全,提升建筑固废的再生利用率,实现智能化、可持续的建筑拆除生命周期管理。
