基于无人机中继通信的清障机器设计
2023-05-23陆斌

作者简介:陆斌(1982— ),男,江苏苏州人,讲师,本科;研究方向:电子与通信工程,无人机。
摘要:随着无人机设备的量产与无线通信技术的发展,无人机通信技术成为研究的热点。无人机的机动性较强,可以实现大规模的部署,而中继节点具有增强网络频谱效率的优势,可以有效提升移动通信网络的应急能力。在无人机与中继通信的联合下,文章针对当前水面环境的清理与保护问题,设计了一款基于无人机中继通信的水面清障机器船,所有的清理工作均通过清障机器船完成。船体与无人机的有效结合,综合了无人机中继通信技术,实现了水面垃圾清理一体化。
关键词:无人机;中继通信;清障机器
中图分类号:TN925 文献标志码:A
0 引言
时代的进步让人们更加注重对水面环境的清理。水面清障机器船可以实现对水面垃圾的自动化清理,降低人力成本,提高打捞效率。大多数清障机器船所清理的水域较为宽广,但是对一些特殊的水域而言,尤其是较小的水域,无论是人力打捞还是清障设备打捞都不太方便,当遇到一些危险的区域、弯曲河道、小型洞穴时,其清理的效果均会受到一定的限制。基于此,本文设计一款可以在以上特殊情况下进行清理的水面清障机器船,将船体与无人机进行有效结合,利用无人机中继通信技术进行水面垃圾的清理,实现垃圾清理一体化,以便在更加复杂的水域开展水面垃圾清理工作。
1 无人机中继通信网络
随着通信网络的快速发展,人们已经无法满足于现有的网络传输,因此,无人机中继通信可以很好地解决传统站点与网络部署之间的平衡。低空无人机可以作为中继站为热点地区分流,未来在5G与超五代移动通信的高速通信传输下,将更加凸显无人机中继通信技术的重要性,尤其是清障场景的设定,无 人机中继传输扮演着十分重要的角色[1]。
尽管无人机技术存在的优势居多,但是仍然存在的诸多问题限制了无人机网络的发展。如多无人機网络管理以及无人机的网络安全问题,由于无人机具有移动性的特点,其通信链路变化多样,因此对无人机的网络配置要注重链路动态性,尤其是在多无人机系统中,节点移动性的问题更加突出,因此急需有效的传输方案来实现无人机的高效稳定传输。无人机设备的安全问题和无人机通信网络的安全问题需要引起重视,未来城市中无人机的数量会大幅增加,如何合理规划防止无人机的碰撞成为当前需要解决的问题。
中继通信的核心思想就是利用部署中继站点的方式获取空间分集的效果,从而增强端与端之间的通信。根据中继节点的工作方式,中继通信分为半双工中继和全双工中继两种工作方式,如图1所示[2]。
无人机中继辅助通信系统作为5G的重要组成部分,中继增强的无线通信网络结构可以有效降低损耗,提高频谱利用率。自中继技术的提出,到如今的技术成熟,中继技术的应用也扩展到更多的场景中, 中继技术可以降低运营成本,提高通信质量,还可以应用在海域管理中,完成水面清障工作。因此,无人机与中继技术的协作对于时代的发展具有重要的现实意义。
2 无人机中继辅助通信传输过程
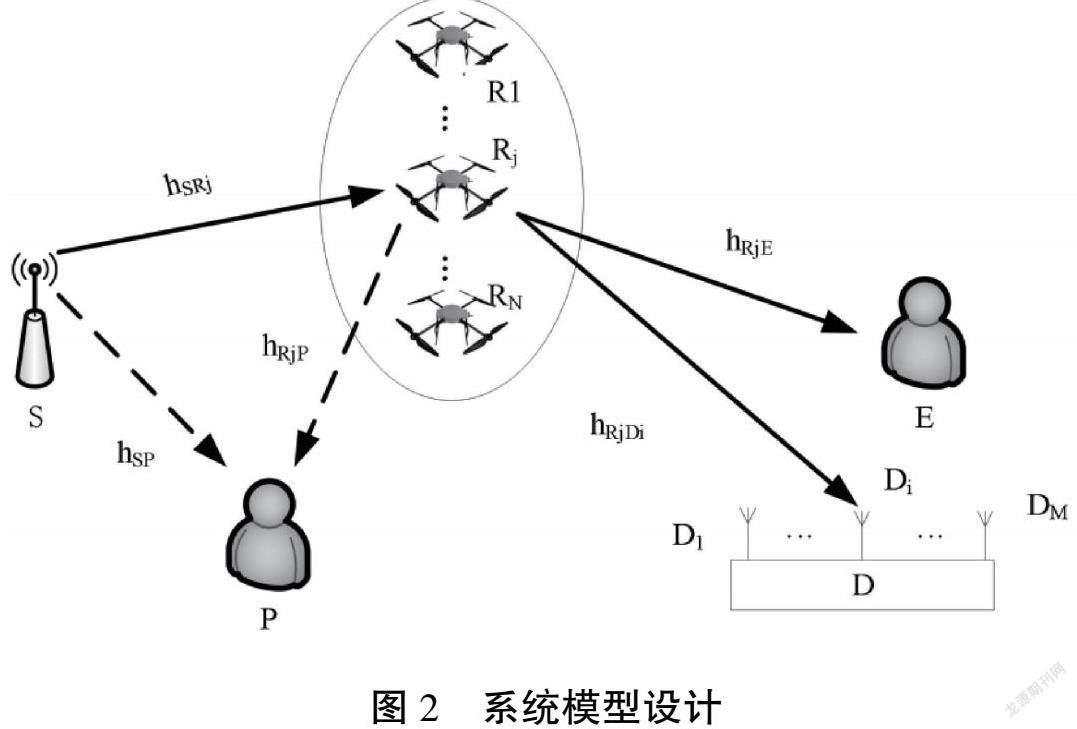
系统模型设计如图2所示,在考虑到次用户与主用户之间的保密传输方式后,将主用户和次用户的网络设置为单个,次用户源节点由于有障碍物,无法直接与目的节点完成通信,因此,无人机中继通信要尽量避开障碍物以免影响传输的性能。该系统模型中,无人机中继采用了DF的转发模式,选取了多个无人机中继中的一个目的节点D进行信号的发送,让无人机进行能量的收集,采用TS与PS的方案收集SU节点发送的信号,从而获取能量,并利用获取的能量向SU发送信号[3]。由于受到障碍物的影响,外来者无法获取SU的信号,但是中继信号会被窃取。
在TS协议中,传输的步骤分为两大部分,第一部分用于收集中继系统中的能量,T表示能量收集和信息处理的时间,α则表示系统时间的转换因子;第二部分则是使用S到中继节点的信息传输,PS协议将能量分为中继能量的收集和信息的传输,利用源节点向中继节点发送能量,中继节点利用收集的能量向目的端发送信号。
将无人机中继与无线电网络进行有效结合,在提高频谱利用率的同时,可以提高无人机中继辅助的安全级别。利用Nakagami-m信道收集无人机中继,分析终端条件下的系统保密性能,从而提高系统的保密率。在复杂的网络环境下,无人机网络容易被窃听、干扰和攻击,因此使用无人机中继辅助进行数据传输,可以增强安全性能,提升无人机的网络安全性。
3 基于无人机中继通信的清障机器总体设计
在设计的过程中,利用无人机中继通信技术,实现船体与无人机的有效结合,让无人机可以及时发现障碍,并引导船体进行清理。船体的设计需要根据水中船体的工作经验,对船体的动力装置进行升级改造,由水下的螺旋推动改为水面的风力推动,以便更加适应恶劣的水域环境。整个船体将PE材料作为主体材料,该材料的可靠性较强。船体的下方设置障碍物收纳装置。
3.1 硬件设计
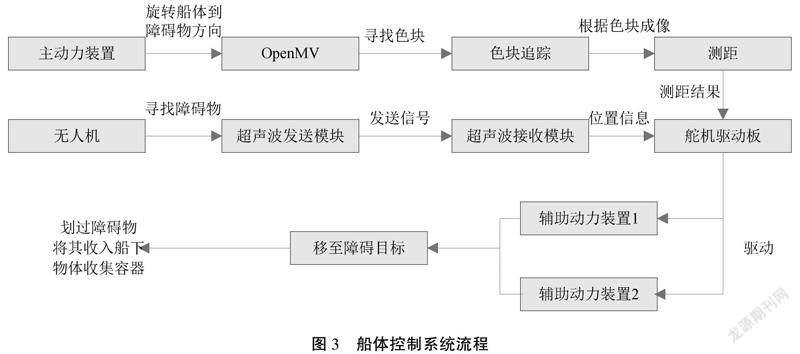
清障机器船的控制分为自动与手动两种控制方式。手动控制方式主要通过主动力装置中多个无刷电机为主,连接2.4G天线和航模遥控器完成船体的控制;自动控制方式则是根据OpenMV和无人机中继通信完成自动操作,利用OpenMV、舵机驱动板、Arduino、超声波完成船体的自动控制,整个控制流程如图3所示。
3.1.1 OpenMV
OpenMV是一款功耗低、体积小、价格低的机器视觉模块,处理器主频达到400MHz,运行速度和图形处理速度较快,内存达1MB,可以支持较大模型的图片以及较大的神经网络模型。同时,在小巧的硬件模块上,利用C语言可以实现核心机器视觉算法。OpenMV上的机器视觉算法可以完成二维码识别、人脸检测、边缘检测等功能,利用此功能实现非法入侵检测以及固定标记物的跟踪。OpenMV被定位为带机器视觉功能的Arduino,既可以通过UART,SPI,GPIO等控制其他硬件,还可以通过单片机模块控制其他硬件。OpenMV可以灵活地与其他模块进行配合,实现复杂的产品功能。由于OpenMV具有设计小巧且程序简单的优势,可以轻松地应用在很多新颖的产品中,完成各种机器视觉等相关的任务。
3.1.2 Arduino
Arduino是一款便捷灵活、易上手的开源电子平台,包含各种型号的Arduino板和Arduino IDE,被构建于开放原始码simple I/O界面,可以进行JAVA和C语言的开发。Arduino能够通过各种各样的传感器进行环境的感知,通过控制灯光的方式来影响环境。微控制器通过Arduino的编程语言进行程序编写,Arduino的开发方式简单且易实现,轻便的功能缩短了开发周期。
3.2 软件设计
系统原理如图4所示。当无人机发现水面上存在障碍物时,系统会立即进行无人机的跟随,让清障机器船通过无人机发送无线电信号,发送信号之后船体开始计时。当无人机接收到电信号后会向船体发送超声波,超声波信号的接收根据无人机与船体的距离进行。由于无人机与机器船的超声波接收距离不同,超声波的信号到达时间也不同。Arduino通过接收器接收的时间进行计算,得出不同的超声波接收无人机的距离长短,然后根据超声波定位算法,计算出无人机的坐标,从而判断无人机距离船体的具体位置,并通过PWM控制电机实现机器船的目标跟随。
船体的自动识别设计需要运用OpenMV技术,对物体进行锁定并打捞,引导无人机进行特征的识别和追踪,最终锁定摄像头的中心位置进行准确打捞。整体设计思路为:首先选中目标,进行色彩格式的调换,记录最大值和最小值;其次将阈值传到Find_blobs函数中;最后根據需求,设置像素点与矩形的面积。
4 结语
为了实现对水面清障机器人的控制效果,需要在船体的甲板平台上进行稳定性的设计,让水面清障机器船可以有效应对复杂的水域环境,从而提高打捞效率。文章在手动控制的基础上进行了自动控制,利用无人机中继通信技术,实现船体与信号的互联,让机器船可以与无人机进行结合,将无人机作为机器船的中继通信平台,从而实现对水面垃圾的清除。
参考文献
[1]盛嵘捷,章凡,刘建雄.基于无人机中继通信的水面清障机器船设计[J].数字通信世界,2020(2):67,70.
[2]张苏新,黄天宇.一种小型水下机器人的设计与实现[J].河北企业,2020(2):159-160.
[3]袁征,薛连莉,武毅.中继通信无人机天线自动跟踪平台设计[J].现代雷达,2017(1):60-64.
(编辑 王雪芬)
Abstract: With the mass production of UAV equipment and the development of wireless communication technology, UAV communication technology has become a research hotspot. The UAV has strong mobility and can be deployed on a large scale. The relay node has the advantage of enhancing the spectrum efficiency of the network, which can effectively improve the emergency capability of the mobile communication network. Under the combination of UAV and relay communication, aiming at the problem of cleaning and protecting the current surface environment, a surface obstacle clearing robotic ship based on UAV relay communication is designed. All the cleaning work is completed by the obstacle clearing robotic ship. The effective combination of hull and UAV, integrated UAV relay communication technology, to achieve the integration of surface garbage cleaning.
Key words: UAV; relay communication; obstacle clearing machine
