基于改进PSO算法在局部遮阴下光伏系统MPPT中的应用
2023-05-22周振雄潘若妍
朱 霄,周振雄,李 镇,潘若妍
(北华大学电气与信息工程学院,吉林 吉林 132021)
近年来,太阳能光伏发电作为一种清洁能源得到了广泛应用[1].光伏电池的输出功率只有在最大功率点(MPP)时才能够获得最高的发电效率,然而,光伏电池输出的P-U曲线呈现不易用数学模型表示的非线性特性,因此,研究最大功率点跟踪(MPPT)技术非常重要[2-3].另外,当光伏板被遮挡或是部分发生故障时,P-U曲线会出现多个峰,而使用传统MPPT算法(如恒压法、扰动观察法(P&O)、电导增量法(INC))很容易陷入局部最优.因此,一些新兴算法,如对传统MPPT算法的改进[4-6]、蚁狮算法[7]、细菌觅食算法[8]、羊群算法[9]等一些智能算法在光伏最大功率跟踪技术上的应用越来越成熟.
粒子群算法是非线性寻优最有效的算法之一,具有控制参数少、收敛速度快等特点,被广泛应用在光伏MPPT上.然而,在光伏多峰曲线下,基本粒子群很容易陷入局部最优,因此,对粒子群算法的改进被相继提出:李志军等[10]提出了一种改进量子粒子群算法与电导增量法相结合的混合控制算法,能够很好地在多峰MPPT上寻找到最大功率点并能减缓功率振荡;雷茂杰等[11]通过引入自适应参数算法和随机粒子,解决了收敛速度慢和振荡较大的问题;姜萍等[12]将电压初始值设在峰值点电压附近,并加入状态因子对控制参数进行线性调整,能够快速稳定地输出最大功率.另外,因具有良好的全局寻优能力,差分进化算法也得到了广泛应用.比如,刘宜罡等[13]提出了一种差分进化与扰动观察法相结合的新算法,解决了较大瞬时尖峰电压和振铃的问题,并在一定程度上加快了收敛速度.然而,上述算法都不同程度地存在遮阴下寻优不佳或调节参数多、算法复杂、振荡幅度大等问题.因此,本文提出一种改进的粒子群算法,通过仿真试验得到了追踪最大功率点曲线,证明了此算法在各种光照条件下都能够保持良好的寻优速度和精度.
1 局部遮阴下光伏阵列输出特性
光伏阵列由光伏电池串并联构成,光伏电池模型见图1.图1中:Iph为光电效应产生的电流;ID为光伏电池内部暗电流;IL为输出负载电流;Rs为电池内部等效串联电阻;Rsh为电池内部等效旁路电阻.输出电流IL满足关系式:
式中:I0为二极管反向饱和电流;T为光伏电池所处环境的绝对温度;k为玻尔兹曼常数;q为电子电荷量;A为理想因子;U为输出电压.根据光伏电池特性搭建模型,设置相关参数,见表1.

图1 光伏电池的内部电路等效模型Fig.1 Equivalent internal circuit model of photovoltaic cell

表1 光伏电池参数Tab.1 Photovoltaic cell parameters

图2 光伏阵列结构模型Fig.2 PV array structure model
为了提高数据准确性,选用10个此光伏电池模块并联成小型光伏阵列PV,再将3个PV串联,因此,图2可以看作是一个3×10光伏阵列.
用不同光照强度照射模拟均匀光照条件和遮阴条件,得到P-U输出曲线,此过程均在25 ℃下进行.由图3可知:不同均匀光照下P-U曲线均呈现单峰的非线性关系,并且最大功率点随光照强度增大而增大.由图4可知:在不同遮光条件下,形成了两条不同的多峰曲线,而多峰也是常规MPPT算法易陷入局部最优的原因所在.

图3均匀光照条件下P-UFig.3P-U under uniform illumination图4模拟遮阴条件下P-U Fig.4P-U for simulating shading condition
2 改进粒子群算法在光伏MPPT中的应用
2.1 基本粒子群算法
粒子群算法的形成背景源自鸟类或鱼群的捕食行为.基本原理:所有粒子在整个空间中随机分布,给予粒子一个初速度进行随机搜索,在每次搜索时粒子主要受到自身经验与群体经验的影响,其中,粒子自身经验确定单个粒子搜索的最佳位置;群体经验确定所有粒子搜寻的最佳位置.在对各粒子的适应度值进行比较后,通过迭代来不断调整粒子的速度和位置,进而寻找到最优点.
粒子群数学模型:在粒子群算法中,将M个粒子随机分布在D维的搜索空间中.其中,第i个粒子位置用xi(i=1,2,,M)表示,速度用vi(i=1,2,,M)表示,Pbest为单个粒子最好位置,Gbest为所有粒子中最好位置.每个粒子不断更新自己的位置和速度:
式中:c1为个体学习因子;c2为社会学习因子;ω为粒子惯性权重,ω∈(0.4,0.9);r1和r2为在(0,1)上的任意值;k为迭代次数.
2.2 参数的改进与优化
在粒子群算法中,当ω值偏大时,粒子飞行速度快,适合全局寻优,但不易得到精确值;当ω值偏小时,飞行速度慢,更易得到精确值,但容易陷入局部最优.本文采用一种自适应惯性权重的策略,根据当前粒子适应度值的相对大小来调整ω:

式中:ωmax为惯性权重最大值;ωmin为惯性权重最小值;fi为当前粒子适应度;favg为平均适应度;fmax为最大适应度.如果当前粒子适应度小于粒子平均适应度,则惯性权重取最大值,加快搜索速度,提高全局搜索能力;如果当前粒子适应度大于粒子平均适应度,则根据当前粒子适应度与最大适应度的接近程度来非线性减小ω值,提高局部的精准搜索能力.
另外,学习因子对寻优结果也有很大影响.c1偏向个体寻优的结果,c2偏向群体寻优的结果,为此对学习因子进行如下调整:

图5 学习因子随迭代次数的变化Fig.5 Learning factor varies with the number of iterations
式中:N为最大迭代次数,取100.学习因子随迭代次数的变化见图5.由图5可知:学习因子c1采用非线性递减的余弦函数,迭代初期缓慢减小,中期快速下降,中后期到后期逐渐贴近最小值;c2采用非线性递增的正弦函数,变化趋势与c1相反.c1和c2的调整使得整个算法粒子寻优过程中前期更注重个体寻优,减少陷入局部最优的可能;而在后期更注重群体寻优,加快算法收敛.
2.3 差分进化算法
虽然对粒子群算法中惯性参数和学习因子进行了自适应调整,但在寻优过程中粒子间相似度会越来越高,很容易陷入局部最优.为了丰富粒子的多样性,同时帮助粒子跳出局部最优,引入差分进化算法(DE).DE的基本原理是利用当前种群个体间的差异重组得到中间种群,然后子代与父代竞争获得新一代种群.该算法具有很好的全局寻优能力,主要有变异、交叉和选择3步操作:
1)变异.变异策略有很多种形式,但鉴于DE/rand/1存在收敛速度慢,DE/best/1易陷入局部最优等缺点,本文在DE/rand-to-best/1变异策略的基础上选用一种新的策略,其中,缩放因子F1控制目标个体和最优个体差值;F2控制附加扰动的大小.

由于F1的存在,目标个体会向最优个体靠拢.F1取值对算法搜索有较大影响,为了便于前期全局搜索,后期能够加快收敛,F1采用非线性递减的变化策略,初始时设为较大值,前期快速减小,后期平稳降低;F2调整粒子在向最优值靠拢时不断向周围扰动,避免陷入局部最优,扰动大小随迭代次数增加逐渐降低,最后减小为0.F1的取值区间为(0.1,1),F2的取值区间为(0,0.4),F0取0.1,N取100.
其中:CR为交叉因子,CR∈[0,1];jrand是在[1,D]随机选择的一个整数,D为维度.CR的大小决定着交叉的概率,这里取0.1.

2.4 重启条件

图6 改进的粒子群算法流程Fig.6 Flow of improved particle swarm optimization algorithm

图7 光伏MPPT系统结构Fig.7 PV MPPT system structure
当光伏系统外界环境(如温度、光照强度)发生变化时,光伏阵列的输出特性曲线也会发生变化.此时,若算法还是保持外界环境未改变之前输出的占空比对系统进行控制,则光伏系统不会在最大功率点处运行,会造成功率损失.因此,需要对算法设置重启条件,以保证当外界环境发生变化时,算法会快速重启,继续跟踪最大功率点.设功率变化量为ΔP:
式中:Preal是实际得到的功率,当ΔP≥0.03时重启算法,回到第1步.
2.5 寻优流程
改进粒子群算法流程见图6.该算法将DE算法引入粒子群算法中,结合了粒子群算法控制参数简单、收敛速度快及DE算法良好的全局寻优、鲁棒性强的优点.另外,通过自适应调整粒子群参数,优化DE算法的变异策略,使改进后的粒子群算法不但寻优速度快,而且避免了粒子出现早熟.与单一优化粒子群或粒子群与传统MPPT算法结合相比,本文将差分进化算法引入粒子群算法中,能够很好地发挥两种算法的优点,弥补不足,并通过优化策略进一步提高了寻优能力.
3 仿真与分析
图7为光伏MPPT系统结构,根据此系统结构在Simulink中搭建光伏MPPT仿真模型.为测试基本粒子群算法和改进粒子群算法在不同条件下对MPP的追踪能力,分别在静态均匀光照和动态遮阴光照两种情况下进行分析.仿真结果见表2.
3.1 静态均匀光照
静态均匀光照输出功率见图8.3个光伏模块光照强度均为1 kW/m2.寻优开始后,两种算法都开始搜索振荡,改进粒子群算法在速度上明显领先,0.08 s追踪到最大功率为6 377 W;而基本粒子群算法在收敛速度上明显更慢,直到0.16 s才追踪到最大功率为6 365 W.由图3可知,此光照强度下的理想最大功率为6 389 W.所以,改进粒子群算法比基本粒子群算法的追踪效率高0.19%,说明改进粒子群算法在均匀光照下能明显提高追踪速度,并提高寻优精度.
3.2 动态遮阴光照
动态遮阴光照输出功率见图9.0时刻,3块光伏板分别用0.8、0.8、1.0 kW/m2的光照强度照射,在此遮阴条件下,依据图4可知,理想最大功率为5 323 W,两种算法搜索振荡后,改进粒子群算法以更快的速度追踪到最大功率为5 273 W,效率为99.06%;相比之下,基本粒子群算法追踪速度较慢,追踪到的功率为5 265 W.在1秒时光照强度突变,改进粒子群算法能够快速适应,经短暂振荡后,迅速追踪到最大功率点1 809 W;而基本粒子群算法在经过巨大落差的光照突变后,围绕1 420 W上下一直处于较大振幅的振荡,不能平稳输出功率,仅追踪到功率为图4的峰3,陷入了局部最优.由此说明,改进粒子群算法能够很好地在动态遮阴条件下完成MPP追踪,而基本粒子群算法很容易陷入局部最优.
综合分析仿真结果可知:在静态均匀光照下,改进粒子群算法比基本粒子群算法有更快的寻优速度和精度;在动态遮阴下,改进粒子群算法在环境发生变化时,能够很快做出反应,短时间内快速稳定地追踪到新的最大功率点;而基本粒子群算法不能很好地适应新的光照条件,寻优速度较慢,振荡较大,很容易陷入局部最优.
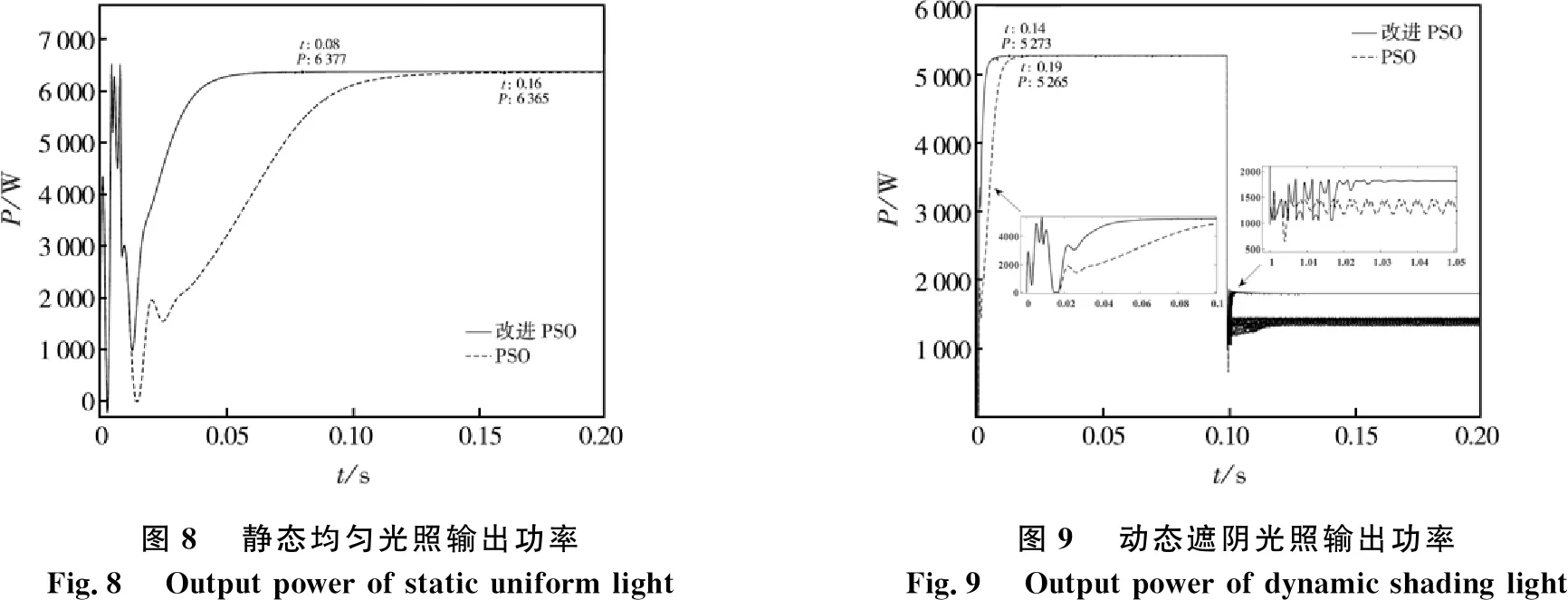
图8静态均匀光照输出功率Fig.8Output power of static uniform light图9动态遮阴光照输出功率 Fig.9Output power of dynamic shading light

表2 仿真结果Tab.2 Simulation results
4 小 结
本文提出了一种改进粒子群算法,在基本粒子群算法中引入自适应惯性权重和非线性变化的学习因子,同时,为丰富粒子多样性,引入差分进化算法中的变异和交叉等策略,并加入了便于应对动态环境变化的重启条件.在Simulink中搭建系统仿真模型进行仿真试验,结果表明:改进粒子群算法能够在多种光照条件下快速且准确地追踪到最大功率点.在应对一些复杂环境时,本算法仍有改进和提升的空间,可结合当前的新型智能算法,提高追踪效率.