交通拥堵辅助系统识别能力策略优化
2023-05-22甘坚南欧阳锐涛郑望晓
甘坚南,欧阳锐涛,赵 辉,郑望晓
(广州汽车集团股份有限公司 汽车工程研究院,广东 广州 511434)
随着汽车行业的快速发展,汽车已经变得越来越电子化和智能化,智能辅助驾驶,即自动驾驶是未来汽车发展的一个大趋势[1]。现自动驾驶L2级别所包括的自适应巡航控制(Adaptive Cruise Control, ACC)、交通拥堵辅助(Traffic Jam Assist,TJA)/集成式巡航辅助(Integrated Cruise Assist,ICA)、前方碰撞预警(Forward Collision Warning,FCW)、自动紧急制动(Automatic Emergency Braking, AEB)、车道偏离报警(Lane Departure Warning, LDW)、保持车道协助(Lane Keeping Assist, LKA)、盲区监测预警(Blind Spot Detection,BSD)、自动泊车辅助(Auto Parking Assist, APA)等系统已广泛装配量产车型,L2处于自动驾驶初级阶段,被称为先进驾驶辅助系统(Advanced Driving Assistance System, ADAS)技术,更高等级的自动驾驶技术也进入了验证阶段,如表1所示。目前特斯拉的Autopilot智能驾驶系统已经初步具备自动驾驶能力,而且后续已有无人驾驶解决方案,国内大多数主机厂如广汽、比亚迪、吉利、长城等主销车型的自动驾驶也处在是 L2和L3阶段。

表1 自动驾驶分级
TJA属于智能驾驶辅助系统中的一种,在交通阻塞的情况下为驾驶员提供纵向及横向辅助,如果车道线在速度区间(一般为0~60 km/h)存在,车辆会被维持在车道内行驶,否则车辆会跟随前方车辆的侧向移动行驶,即在速度区间(一般为60 km/h以上),车辆会被维持在车道中心附近行驶[2]。
该系统的基本原理是在车道线清晰的情况下,其基于摄像头识别行驶车道的标识线,并检测本车在车道内的位置,然后向转向系统发出信号,自动调整转向,将本车保持在车道内行驶来达到横向控制的目的;基于车载前置毫米波雷达探测前方纵向移动目标,发出纵向加速度来达到纵向控制的目的。在车道线不清晰的情况下,其基于车载前置毫米波雷达探测前方目标的纵向和横向移动,相对应发出纵向和横向的加速度请求,来达到纵向及横向的控制[3],如图1、图2所示。
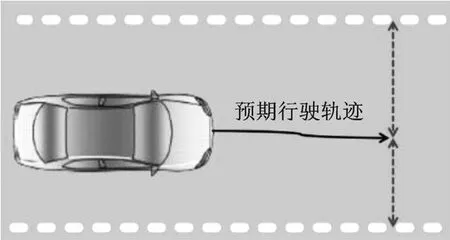
图1 车道线清晰可见时TJA工作示意图

图2 车道线不清晰或遮挡时TJA工作示意图
文章主要解决搭载交通拥堵辅助系统车辆,在匹配验证该系统阶段时存在跟随前车过十字路口工况下,自车已进入车道后识别延迟造成转向出现蛇形修正或者急打方向的情况,从要因分析、策略优化、实车验证这三个方面出发,尝试杜绝匹配过程中此类问题的发生。
1 问题回顾
1.1 问题背景
在对某车型进行交通拥堵辅助系统匹配验收时,车辆开启TJA功能,且以跟车模式经过十字路口工况,即使自车已经进入车道,路面有车道线标记,但是仍需要时间从跟车模式切换到跟线模式[4]。此种情形下如果跟随前车进入车道后,前车方向稍微有偏离车道中心线,自车跟随前车进入车道重新识别到车道线后,会造成转向蛇形修正或者急打的情况。
1.2 问题分析
为验证自车由跟车切换跟线的工况下,方向出现蛇形修正或者急打情况,在同一十字路口,前车同一纵向速度,不同的横向偏移速率进行引导后车跟随进入车道,前车与车道中心线偏移越大,后车跟随进入车道与车道线偏离越大,方向会出现蛇形修正或者急打,造成系统不可靠性。
通过上述问题的多次复现,以及后期数据分析确认,即使自车已经进入车道,路面有车道线标记,但是仍需要时间从跟车模式切换到跟线模式,跟线问题在于video line信号源被抑制,车辆迟迟进入不了跟线模式,只能继续保持跟车状态,故引起以下问题:
1)车辆开启TJA功能以跟车模式经过十字路口工况,进入车道与车道中心线存在偏差,转向会出现蛇形修正或者急打;2)自车进入车道后,与车道中心线偏离越大,转向出现蛇形修正或者急打幅度越大。
文章主要针对车辆开启TJA功能,以跟车模式经过十字路口工况,进入车道与车道中心线存在偏差,方向出现蛇形修正或者急打这一问题进行原因分析探索,通过初步分析确定,车辆开启TJA功能以跟车模式经过十字路口工况,即使自车已经进入车道,路面有车道线标记,但是仍需要时间从跟车模式切换到跟线模式。车道线识别过晚会造成转向蛇形修正或者急打,故制定出通过解除相关的抑制条件,缩减识别切换到车道线的时间,改善转向蛇形或者急打的情况,为最终系统通过验收提供解决方案和依据。同时,也可以根据分析结果,为后续车型的交通拥堵辅助系统优化提供一定的参考意义。
2 验证分析
2.1 验证方案
通过前期数据分析,跟线问题在于video line信号源被抑制,车辆迟迟进入不了跟线模式,只能继续保持跟车状态,从数据来看,video line信号报抑制有以下四个:1)single line control单侧车道线抑制条件控制;2)data max方向盘转角速率最大阈值抑制条件;3)no ego line detected无目标车道线检测抑制条件;4)Unreliable lane boundaries不可靠车道线抑制条件。
2.2 验证方法
对不同的抑制条件进行优化,验证在同一个场景工况下,采取对单个抑制条件延后抑制发生时间以及提前抑制条件解除时间的方法,从而改善车辆蛇形修正或者方向急打的情况,其中,目标车辆雷达和摄像头的基本信息如表2所示。
3 方案验证结果与讨论
3.1 单侧车道线抑制条件控制
1)改善方案一:单车车道线识别抑制条件single line control,为防止将人行道以及车道路修补地方识别为车道线,现设置延后抑制条件single line control发生;2)改善效果:功能进入慢的问题有改善,具体区别如表3所示;3)潜在风险:当相邻车道有左转弯待转区域时,在车辆进入十字路口的短暂情况下,摄像头会把待转区域的一侧车道线和一条人行道误认为是本车道线,因为抑制激活滞后,会引起车辆向左偏移,有潜在风险。

表3 调整single line control抑制延后触发区别
3.2 延后data max抑制发生时间以及提前抑制解除时间
1)改善方案二:data max抑制是为了防止车头转角过大而设置相应阈值,与方向盘转角速率有关系的抑制条件,具体如图3所示。现设置延后 data max抑制发生时间以及提前抑制解除时间,解除时间由4 s调整为2 s;2)改善效果:仅改善因车辆掉头产生抑制导致功能进入慢问题,正常跟车过十字路口总体情况未改善,功能重新激活时间仍为 3 s;3)潜在风险:条件满足后需等待4 s以解除抑制,基于大数据采集信息后定下来的逻辑策略,且解除抑制时间过早,容易出现行车转向混乱,且改善效果不明显。

图3 方向盘转角速率曲线示意图
3.3 延后no ego line detected抑制发生时间
1)改善方案三:no ego line detected抑制是摄像头没有检测到自车道线后0.5 s激活抑制,现设置延后该抑制发生的时间,调整至4 s后触发该抑制;2)改善效果:可以解决因为道路颠簸或者较短距离内车道间隔引起车道丢失抑制的情况,对十字路口工况模式切换优化不大,功能重新激活时间仍为3 s;3)潜在风险:与方案一引起的问题类似,有潜在风险,为弱化风险现将抑制开始时间调整为4 s,情况稳定功能进入慢的总体问题解决效果有限。
3.4 延后Unreliable lane boundaries抑制发生时间及提前解除该抑制
1)改善方案四:Unreliable lane boundaries抑制是摄像头没有检测到或认为自车道线不可靠,系统判定开始抑制,现设置延后 Unreliable lane boundaries抑制的开始时间,尽快解除Unreliable lane boundaries抑制,降低该抑制判断阈值;2)改善效果:数据显示,报出Unreliable lane boundaries抑制的次数明显降低,对非过十字路口正常行驶中模糊车道线识别有改善,但是TJA跟线模式进入慢改善不大,前车偏离车道中心线较大时,仍会因为模式切换不及时而出现急打方向的情况;3)暂无潜在风险。
3.5 提高车道线的置信度,降低对车道线识别的阈值
1)改善方案五:线的置信度是一个可能性,是摄像头对识别到的灰度、连续性等参考因素,集合所有采集到的信息来进行融合,然后判定是否是一条车道线,可能性介于0~1,其中0是百分百判定不是车道线,1是判定百分百是车道线。现设置提高车道线的置信度至0.1~0.2,降低车道线识别阈值;2)改善效果:从跟车模式可更快切换到跟线模式,明显改善车辆蛇形修正后者方向急打情况,如表4所示;3)暂无潜在风险。

表4 调整置信度后区别
4 分析与改善
4.1 结论分析
通过前期的数据分析,以及后续的优化措施表明,可得出如下结论:
1)车辆开启TJA功能以跟车模式经过十字路口工况,进入车道后若相对车道中心线有偏离,则出现整车蛇形修正或急打方向,其因跟车与跟线的模式切换没有及时切换平缓过度造成;2)跟车与跟线模式切换没有平缓过渡,是由于 video line等信号源被抑制,车辆迟迟不能切换至跟线模式,只能继续保持跟车模式的状态;3)通过延后no ego line detected抑制发生时间和延后Unreliable lane boundaries抑制时间抑制发生时间以及提前抑制解除时间有改善,但效果不明显。通过调整车道线的置信度至0.1~0.2,降低车道线识别的阈值,使得系统可以更快地识别到车道线,从跟车模式可以更快切换到跟线模式,明显改善车辆蛇形修正或者方向盘急打的情况。
4.2 改善方案
识别能力策略实现方法如下:1)现设置提高车道线的置信度至:0.1~0.2,降低车道线识别的阈值;2)延后no ego line detected抑制发生时间,延后Unreliable lane boundaries抑制开始时间,尽快解除Unreliable lane boundaries抑制,降低该抑制判断阈值。
针对以上改进策略,以提高置信度为主其他抑制条件为辅的策略进行再次实车验证,车辆跟车过十字路口,进入车道后可快速从跟车模式切换至跟线模式,有效杜绝车辆蛇形修正或者方向急打的情况,整车横向控制表现平顺,整体可接受。
5 结束语
通过一系列的分析验证,在现有算法策略框架下,可通过置信度以及相关抑制条件提高跟车过十字路口工况的能力,改善车辆进车道后易出现蛇形修正或者方向急打的情况,为后续匹配该系统的车型提供一定的设计经验,同时为后续无人驾驶解决方案提供一定的基础,有利于产品品牌力的提升。
