挠性卫星执行器故障下的反步容错控制
2023-05-19邵书义吴庆宪
钱 宇,邵书义,吴庆宪,陈 谋
(南京航空航天大学自动化学院,南京 211106)
0 引言
卫星作为重要的太空节点,其姿态控制系统具有重要作用,尤其是带挠性附件的卫星姿态控制近年来逐渐成为学者们的研究热点。为了实现对地观测、侦察,监测地球气候和污染以及实现通信转播等功能,卫星需要具有精确的姿态机动、指向和跟踪能力[1]。然而,太空环境复杂且未知,挠性卫星在轨运行期间一般会受到未知干扰的影响,甚至可能会发生未知的执行器故障。除此之外,挠性卫星与刚性卫星不同,存在低阻尼挠性附件与中心刚性的耦合作用,附件的振动会影响卫星的姿态指向精度,且附件振动模态一般不可测[2]。为了解决这些情况下的挠性卫星姿态控制问题,需要一种控制方案保证系统的稳定性以及姿态跟踪特性。
为了实现挠性卫星的高精度控制,越来越多先进的姿态控制方法被逐渐应用到这个领域,例如自适应控制方法、滑模控制方法、基于干扰观测器和故障估计器的鲁棒控制方法等。自适应控制方法是利用现有的知识在线调节系统参数以适应环境变化,在环境未知的太空环境下,自适应控制方法的参数自调节能力具有明显的优势。文献[3]针对具有参数不确定性、干扰和执行器故障的线性卫星系统设计了自适应状态反馈控制器,完全消除了执行器故障、外部干扰和参数不确定性的影响,并保证了系统状态渐进收敛。文献[4]针对具有外部干扰和执行器故障的刚性卫星设计了故障估计器估计故障,并设计了参数自适应律补偿外部干扰的负面影响,进一步结合反步法设计了鲁棒容错控制律。滑模控制因为对环境不确定性具有不敏感性,所以对于处理具有不确定干扰和已有先验故障信息的系统具有较强的鲁棒性,应用于卫星的容错控制也有较大的优势。文献[5]针对挠性航天器执行器卡死与失效故障的姿态稳定控制问题,提出了一种改进型滑模容错控制策略,保证了系统对外部干扰、不确定和时变转动惯量具有良好的鲁棒性。文献[6]在卫星执行器出现故障、持续有界干扰和未知惯性参数不确定性的情况下使用自适应反步滑模控制方法,实现了高精度的姿态控制和振动抑制。
基于干扰观测器的控制方法是一种有效的抗干扰控制方法,通过设计干扰观测器估计干扰并前馈给控制器来提高系统的抗干扰能力。卫星工作环境复杂,一般都存在干扰,因此研究基于干扰观测器的鲁棒容错控制也具有很强的实际意义。文献[7]针对执行器完全失效故障设计了干扰观测器观测干扰,进而设计了具有抵消干扰和抑制扰动的容错控制器。文献[8]研究了一种有限时间干扰观测器,使用观测器观测到的干扰值重构由故障和干扰引起的综合不确定性,并设计控制器保证了闭环姿态控制系统在有限时间内收敛到稳定区域。故障估计器与干扰观测器类似,但是目的是用于估计故障大小,以此为基础还需要故障的诊断和辨识模块,在此基础上调整控制器参数能减少一般控制器存在的保守性问题。文献[9]针对具有执行器故障且输入时滞的单轴旋转卫星设计了干扰观测器和故障估计器,对挠性附件产生的干扰和执行器故障进行估计,再结合时滞控制方法提出了复合时滞控制器。文献[10]提出将迭代学习观测器用于故障观测,实现对故障的快速估计,再结合滑模控制方法对卫星实现姿态控制。文献[11]针对具有惯性不确定、外部干扰、输入饱和和多种不同类型的执行器故障设计综合故障估计器和容错控制器,用非奇异快速终端滑模技术实现故障下的闭环系统稳定性。以上讨论中,针对航天器的故障容错控制,国内外学者已经将各种先进控制理论与方法应用于有不同实际情况下的系统中。然而,目前针对同时具有外部干扰、内部干扰以及同时包括时变加性和乘性执行器故障的挠性卫星容错控制的研究成果中,少有通过设计故障观测器获取故障估计信息、利用故障估计信息完成容错控制的方法,现有的基于故障观测器的研究成果中,一般仅研究只含有加性故障或只含有乘性故障情况下的容错控制,因此针对同时具有加性故障和乘性故障的基于故障观测器的挠性卫星容错控制还需进一步研究。
基于上述分析,本文针对具有外部干扰、挠性附件振动引起的内部干扰和执行器故障的挠性航天器,提出了一种基于故障观测器的自适应反步容错控制方案,以保证系统能维持稳定和跟踪性能。本文提出的自适应律同时补偿了执行器加性故障和外部干扰引起的控制参数变化以及挠性附件不可测振动模态引起的模型不确定性,保证了航天器的稳定性和跟踪性能,而且自适应参数设计简单,同时减少了控制器所需的计算量。
1 问题描述
1.1 数学模型
考虑挠性附件对卫星本体的扰动影响,挠性卫星的姿态角速度模型为
式(1)中,J∈R3×3为卫星本体转动惯量;ω=[ωx ωy ωz]T为卫星本体坐标系相对惯性坐标系中沿三轴转动的角速度;ω×为ω的斜对称矩阵;δ∈R N×3为挠性附件与卫星中心刚体的刚-挠性耦合系数矩阵;η∈R N为挠性附件的振动模态向量,N为振动模态阶数;C=diag(2ξiωni)(i=1,2,…,N)为阻尼矩阵,K=diag(ω2i)(i=1,2,…,N)为卫星固有频率矩阵,ξi和ωni(i=1,2,…,N)为挠性附件第i阶振动模态的阻尼系数和固有频率;uf∈R3为故障情况下的控制输入;d∈R3为未知外部干扰;如果向量a=[a1a2a3]T,那么斜对称矩阵定义如下
需要注意的是,卫星挠性附件的振动对卫星姿态具有较大的影响,但振动模态η是不可测的,现有的传感器可获得的信息无法直接设计控制器抵消附件振动对本体产生的影响,这给卫星姿态控制系统带来了很大的不确定性,因此在控制器设计过程中需要对振动模态进行处理。
引起挠性卫星执行器发生故障有多种原因,比如轴承损坏导致飞轮停转、轴承润滑不良导致摩擦力矩增大、元器件老化导致控制性能下降、晶体管损坏导致飞轮无法启动等,以上各种故障可以总结为完全失效故障、效率下降故障、偏移故障和卡死故障,对执行器故障建模为[3]
式(3)中,ρ=diag(ρ1,ρ2,ρ3) 为效率损失因子,表征执行器的效率下降故障,ρi∈(0,1],i=1,2,3;ε为加性故障,表征偏移故障,完全失效故障对应ρ=0,意味着控制器输出对系统状态无影响,因此不在本文的研究范围内。uc为控制器无故障情况下的输出,uf为注入故障后的控制器输出。当ρi=1(i=1,2,3) 且εi=0(i=1,2,3)时,卫星表现为无故障;当ρi=1(i=1,2,3)且εi≠0(i=1,2,3) 时,卫星表现为偏移故障;当ρi∈(0,1)(i=1,2,3)时,卫星表现为失效故障。
本文采用四元数法描述卫星姿态,挠性卫星的姿态运动方程为[6]
式(4) 中,q-为卫星姿态的四元数,=[q0qT]T,q0为四元数q-的标量部分,q为四元数的矢量部分,q0和q满足q20+qTq=1,I3为一个三维单位矩阵,q×为向量q的斜对称矩阵。
式(5)中,误差四元数满足q2e0+qTe qe=1,ω-Re ωd为卫星本体坐标系相对参考坐标系的角速度误差;ωd=[ωd1ωd2ωd3]T为卫星本体坐标系相对参考坐标系的期望姿态角速度,Re为本体参考系到惯性参考系的旋转矩阵,并且Re=(q2e0-qTe qe)I3+2(qTe qe-qe0qe×)。
1.2 控制目标
本文的控制目标是设计容错控制器使带有执行器故障(式(3))和外界干扰的挠性卫星姿态角速度系统(式(1))满足稳定跟踪性能,运动学误差系统(式(5))满足镇定性能。对于四元数表示的卫星姿态,和-表示相同的实际物理姿态,因此跟踪目标即可表示为或者以及ω→ωd。使用误差四元数表示四元数跟踪性能时,或 [-1 0 0 0]T即可表示或又因为姿态误差四元数满足因此控制目标可以转换为设计控制律uc保证且
为了后续控制器的设计,给出以下假设及引理:
假设1[12]: 卫星系统受到的外界干扰d(t)是有界的,即
假设2[4]: 执行器故障效率损失因子ρi(i=1,2,3)是慢时变的,或可以认为是常数;执行器加性故障ε是有界的,‖ε‖≤cε,cε>0。
假设3[13]: 期望姿态角速度ωd是有界的。
引理1[14]: 如果连续的标量函数ν(t) 满足存在且有限,那么
2 自适应反步容错控制律设计
针对挠性卫星具有挠性附件引起震荡和存在执行器故障的问题,本节将设计自适应容错控制器完成控制目标。首先对未知外界干扰、执行器加性故障和不可测挠性模态进行处理并用自适应律加以估计,再用投影算子对执行器乘性故障进行故障估计,进一步设计辅助系统,并结合反步法设计虚拟控制律,用故障估计器得到的故障估计信息和自适应律得到的复合干扰信息设计反步容错控制器,保证系统的稳态和跟踪性能。容错控制原理如图1所示。

图1 卫星容错控制框图Fig.1 Block diagram of satellite fault-tolerant control
2.1 参数化处理
为了设计控制器,需要对无法测量的挠性模态,即内部扰动、时变的外部扰动和加性故障进行参数化处理,将式(3)代入到式(1)中得
取J0=J-δTδ,对于实际卫星物理系统,转动惯量J的主对角元素远大于非主对角元素和耦合矩阵δ的元素,所以J0依然是正定对称的,因此J0可逆,则式(6)可改写为
取Td=J-10[(δTC-ω×δT)η·+δTKη+d+ε],由文献[12]可知: 存在未知正常数cη1、cη2和cη3满足和
再结合假设1 和假设2 可得[12]
式(8) 中,H=[H1H2H3H4H5]T,Hi≥0(i=1,2,…,5)是未知常数,Φ=[1 ‖ω‖
2.2 辅助系统设计
针对参数化处理后的系统构造辅助系统
2.3 参数自适应律与故障估计器设计
为了估计参数化后的外界干扰、内部干扰和加性故障,设计如下参数自适应律
式(10)中,γ为待设计的正常数。
使用投影算子构造如下故障观测器估计执行器乘性故障因子ρ
式(11)中,μi(i=1,2,3)为待设计的正常数,ρi(0)∈(0,1],Proj{·}为投影算子,定义如下[8]
由式(7)和式(9)可得
选取Lyapunov 函数为
对式(14) 进行求导,并将式(10)、式(11) 和式(13)代入得
2.4 容错控制律设计
结合反步法对姿态控制误差系统(式(5))和辅助系统(式(9))进行容错控制器的设计,具体步骤如下:
步骤1: 定义跟踪误差为
式(16)中,βd为待设计的虚拟控制律。
对V2进行求导得
取虚拟控制律
式(20)中,K2为待设计的正定对称矩阵。
将式(20)代入式(19)中,可得
步骤2: 对式(16)进行求导并将式(9)代入得到如下表达式
选取Lyapunov 函数为
对式(23)求导并代入式(22)中,可得
设计反步容错控制器为
式(25)中,K3为待设计的正定对称矩阵。
将式(25)代入式(24)中,则有
2.5 稳定性分析
定理1: 对于具有执行器故障(式(3))的挠性卫星姿态系统(式(1)和式(5)),在满足假设1~假设3的情况下,使用参数自适应律(式(10))、故障估计器(式(11))、虚拟控制律(式(20))和实际容错控制器(式(25)) 能保证卫星系统实现跟踪误差渐近稳定,即
证明: 选取Lyapunov 函数为
对式(27)求导,并将式(15)、式(21)和式(26)代入得
因为V4≥0,所以可以得到
式(29)中,K4=min{λmin(K2),λmin(K3)}。
3 数值仿真
为进一步说明本文控制方法的有效性,本节将本文设计的控制信号应用在文献[12]中给出的挠性航天器模型,配置系统参数和仿真初值,得出仿真结果以说明控制方案的有效性。
3.1 卫星模型
根据文献[12],挠性模态考虑前四阶,选取卫星参数如表1所示。
针对该仿真分析,假设卫星受到外部干扰、执行器故障、期望角速度和系统初值设置如表2所示。
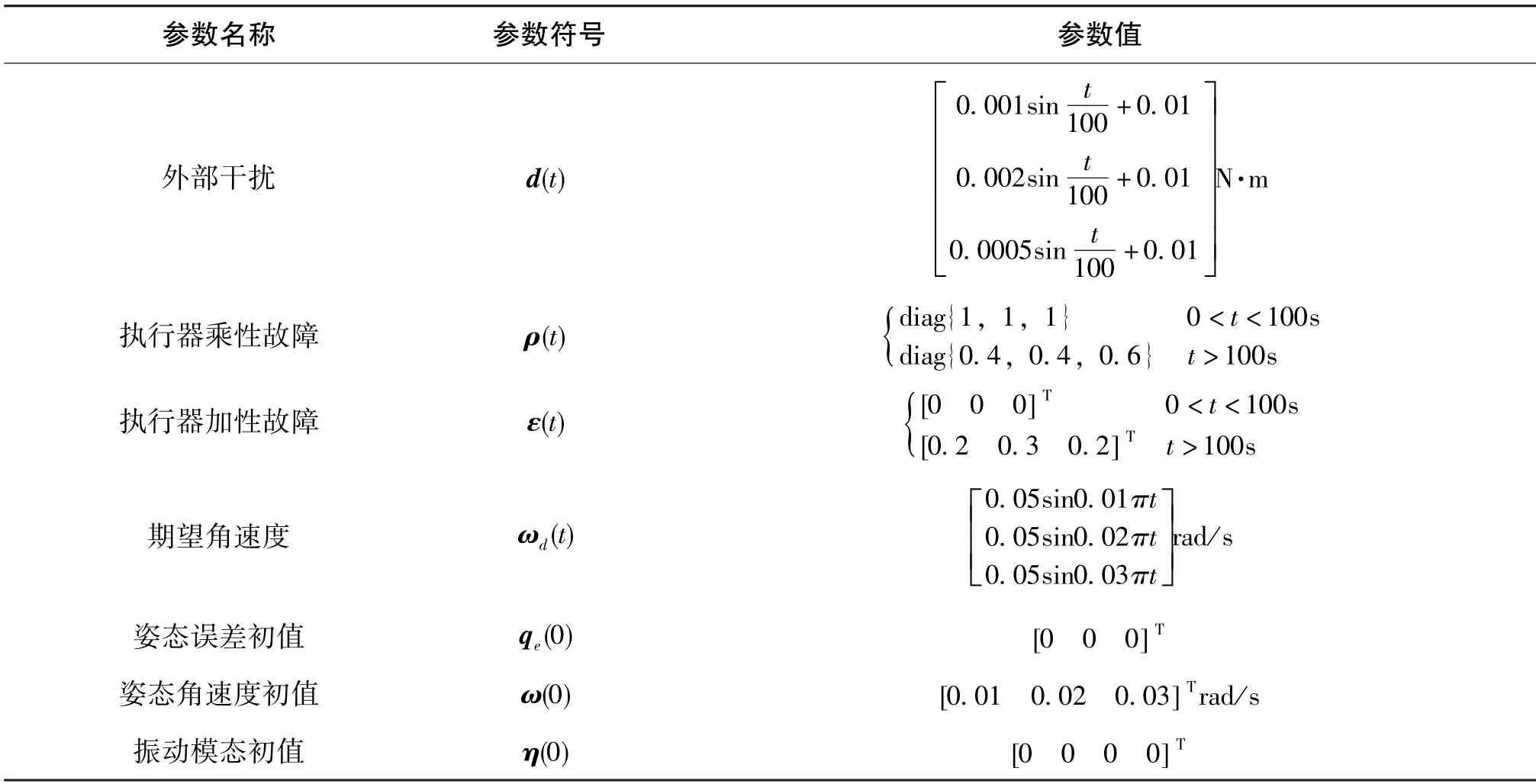
表2 系统参数设置Table 2 Setting of system parameters
控制器参数设置如表3所示。

表3 控制器参数Table 3 Parameters of controller
3.2 仿真结果
根据上述仿真参数,得到加入控制信号后的角速度ω与期望角速度ωd的对比如图2所示,加入控制信号后的姿态误差四元数qe(t)的变化情况如图3所示,控制信号u(t) 的变化曲线如图4所示,挠性附件的振动模态η(t) 的震荡情况如图5所示。
由图2~图5可知,将式(25)中的容错控制律应用于挠性卫星模型中,该控制方案是有效的。图2展示了控制器下故障发生前后实际角速度与期望角速度的对比: 可以看到,在仿真之初虽然角速度初值与期望角速度存在偏差,但是状态量迅速反应,以调节时间( ±0.2%)约7.8s 实现期望角速度的跟踪,超调量约0.2%,稳态误差为10-4量级,在100s 故障发生时刻后,角速度有短暂小幅度波动,但在控制器的作用下迅速再次以超调约0.14%的效果跟踪期望角速度。图3为姿态误差四元数qe(t)变化情况: 仿真之初系统出现0.55%的超调,在100s 故障发生时刻后,再出现0.25%的超调后趋于稳定,可以看到四元数并没有完美地实现=[qe0qTe]T=[ +1 0 0 0 ]T或[-1 0 0 0]T的控制目标,而是收敛到控制目标10-3范围内缓慢波动,说明本文设计的控制方法仅能保证姿态收敛而非渐进收敛到期望姿态指令。图4为三轴力矩控制信号u(t) 变化情况;由图4可知,力矩的范围是有界的,在实际的物理模型中也是可以实现的,同时力矩的波动也是较为平缓的,未出现剧烈抖动的情况,以避免在实际物理系统中可能对执行器产生机械损耗等。图5为不可测的振动模态η(t)的前四阶模态变化情况: 由图5可知,实际抖动的幅度是有界且逐渐收敛的。

图3 姿态误差四元数曲线图Fig.3 Curves of attitude error quaternion
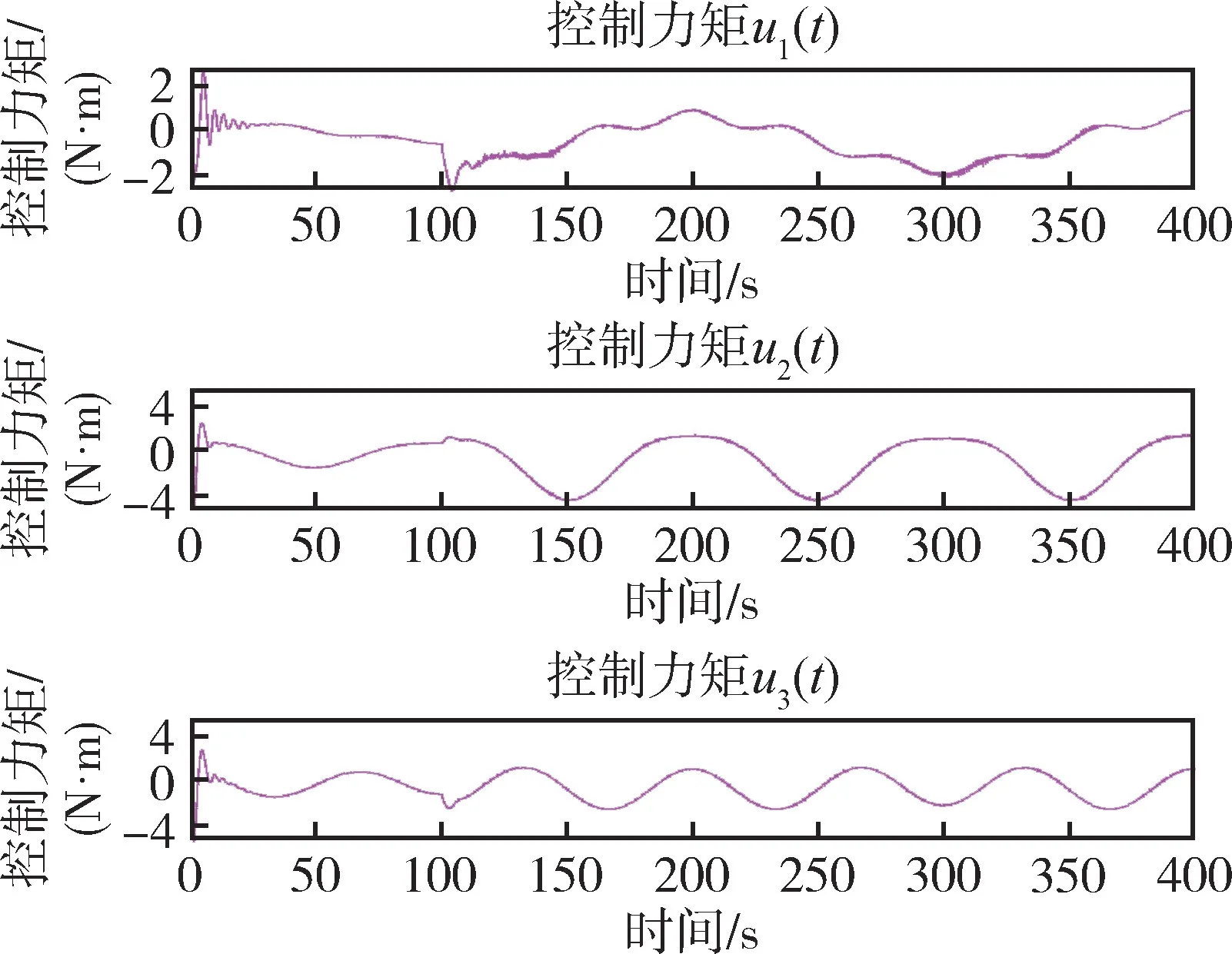
图4 控制信号曲线Fig.4 Curves of control signal
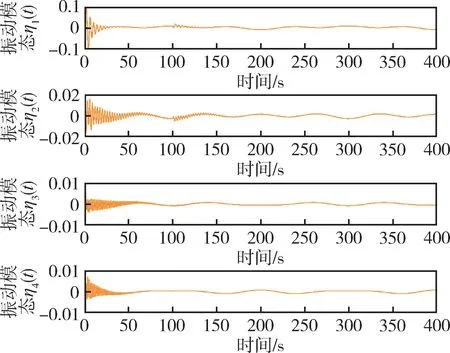
图5 振动模态曲线Fig.5 Curves of vibration mode
为验证设计容错策略的有效性,选取未使用故障观测器的系统做对比实验,得到角速度跟踪误差的对比图如图6所示,姿态误差四元数对比图如图7所示。
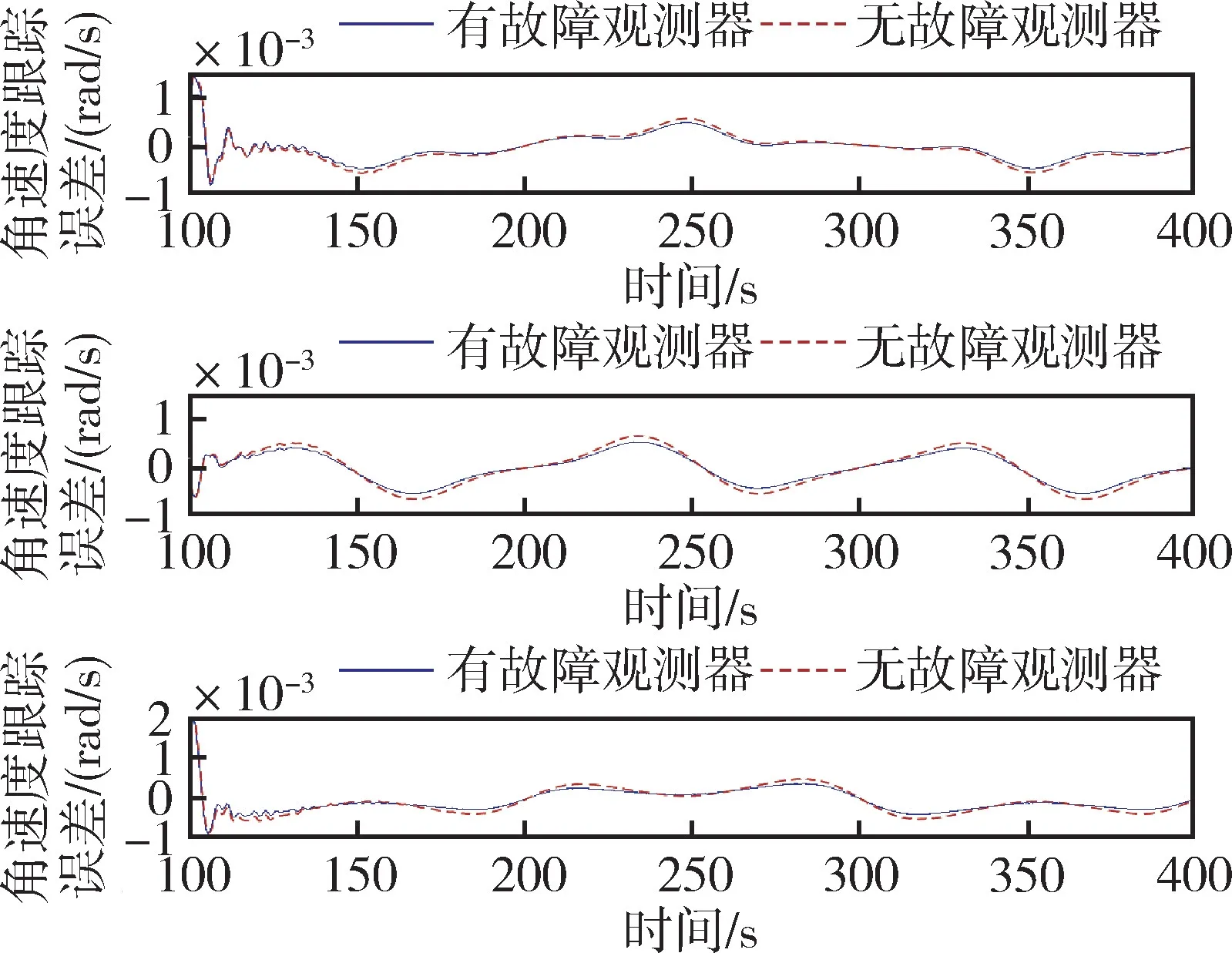
图6 角速度跟踪误差对比Fig.6 Comparison of angular velocity tracking error
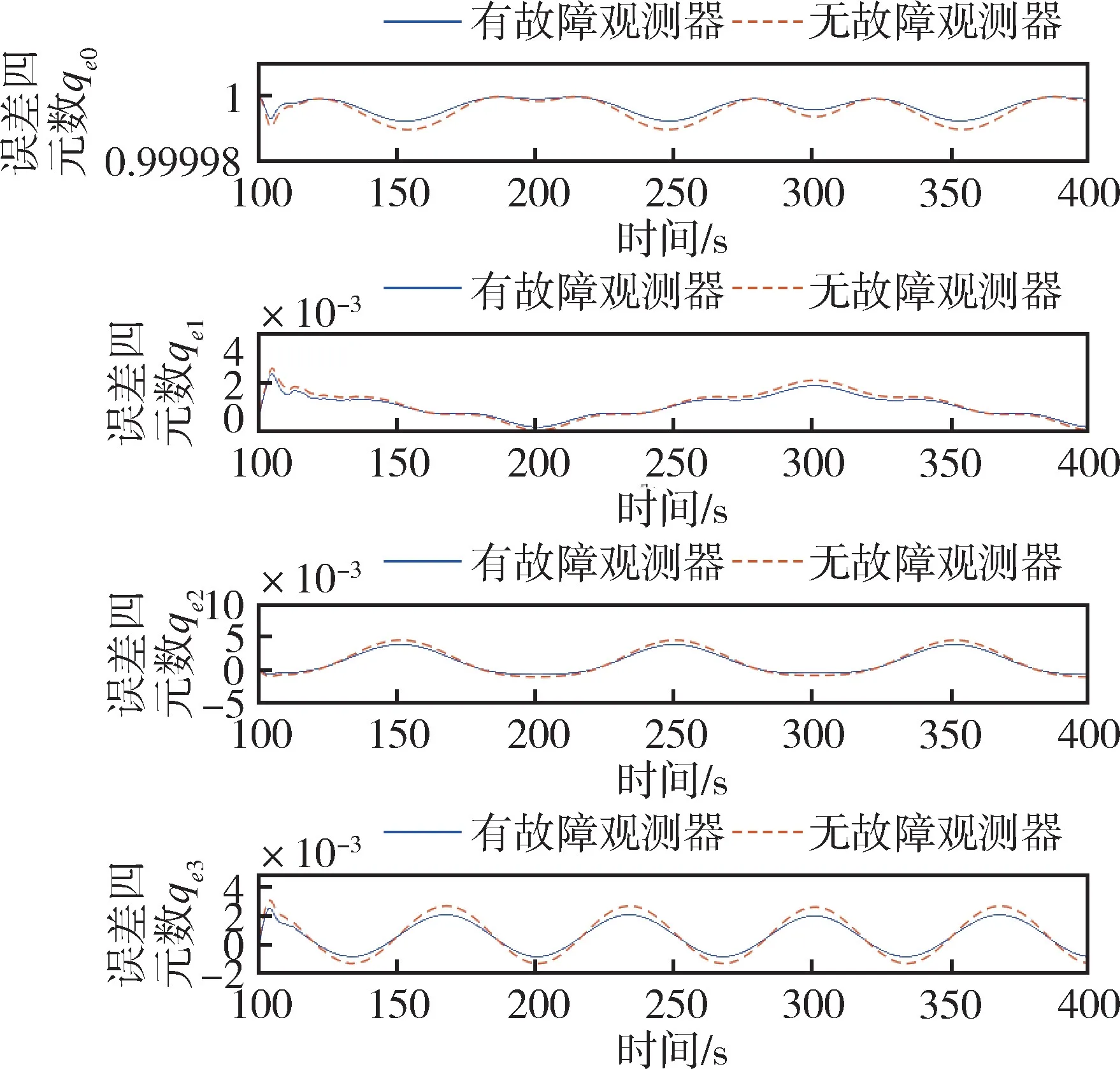
图7 姿态误差四元数对比Fig.7 Comparison of attitude error quaternion
由图6、图7可知,在100s 故障发生时刻后,具有故障观测器的容错控制方案具有更好的控制效果。图6为系统分别在有无故障观测器情况下的角速度跟踪误差对比: 由图6可知,使用故障观测器的系统在故障发生后角速度变化较平稳,减少了角速度大幅变化情况的发生。图7为系统分别在有无故障观测器情况下的姿态误差四元数对比:由图7可知,姿态误差四元数在控制目标附近震荡时,有故障估计器的震荡幅度更小,更接近控制目标,与控制目标间的误差更小。根据以上仿真结果的分析,本文设计的容错控制方案是有效的,且有一定的进步性。
4 结论
本文介绍了一种自适应反步容错方案,以解决存在外界干扰和执行故障的挠性卫星姿态跟踪问题。采用包含效率下降故障、偏移故障和卡死故障的执行器故障模型,设计故障观测器估计乘性故障信息,将加性故障、外部干扰和挠性部件震荡引起的内部干扰参数化视作复合干扰,并设计自适应参数律对其进行自适应补偿,设计反步控制器,调整控制器参数以保证系统的稳定性与跟踪性能。数值仿真和对比实验验证了本文提出的反步容错控制策略在执行器故障、外部干扰情况下的有效性,保证了挠性卫星在干扰和故障下的姿态跟踪控制。
