构建时空管理基础设施,支撑车路云网图智能协同
2023-05-19朱伟华任强
朱伟华、任强
(1.杭州市数据质量研究院,杭州 310024;2.北京卓众出版有限公司,北京 100083)
0 引言
2022年以来,越来越多习惯开车导航的车主朋友会发现,有些城市的导航地图能够对红绿灯倒计时进行提醒。这些具备提醒能力的十字路口,95%以上都是采取固定频率切换红绿灯。这种固定频率的红绿灯,让一些地图互联网公司能够采取简单的视频分析算法,对车辆拍摄的红绿灯图像动态分析,然后就能够以秒这个精度,为车主提供红绿灯倒计时服务。车主在使用手机导航地图时,能够实时获得前方红绿灯的动态信息,可有效减少司机低头看手机而降低通行效率的问题。导航地图的红绿灯动态信息,恐怕是车主当下最能直观感受到的“车路协同”服务。
1 自动驾驶时代的“车路云网图”应保障时空可信
在中国信通院去年发布的《车联网白皮书(2022)》中,已经从“车路协同”这个概念出发,提出了“车路云网图”智能协同方案[1]。产业界更是把这个方案上升到智能网联汽车“中国方案”的高度。目前各地政府主导建设的智能网联汽车测试道路,主要是由单一市场主体或者技术联盟完成建设,本质上是“车路云网图”的内部协同,即车辆、道路、云端、通信网络和实时地图这5 套系统间的“机器对机器”自动化交互。要实现智能网联汽车可信赖的自动驾驶,必须建立借助通用技术实现外部协同的基础上。而最关键的协同,就是“车路云网图”的时间、空间协同(图1)。
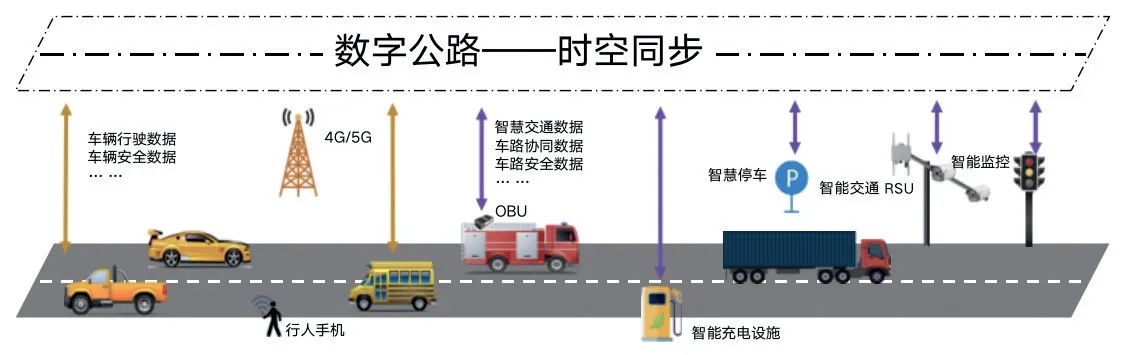
图1 数字公路、时空同步示意图
所谓时间、空间协同,意思是车辆什么时间、位于什么坐标点,5 套系统应当有共识。对于驾驶者而言,看到手机上红绿灯提醒,自然会抬头看路,然后根据自己所处的位置决定何时加油门起步。但对于处于自动驾驶状态的车辆而言,它不具备时间、空间感知能力,必须要靠时间、位置数据之间的比对,才能判断自己的位置。而且这个比对精度,不能是秒,至少应该是毫秒级,因为1 s 之内,车辆已经移动若干米。即使政府开放红绿灯实时数据,在毫秒这个时间维度下,车辆从车路协同平台获得的红绿灯信号5 s 倒计时,究竟从几点几分几秒几毫秒开始,得以车辆和红绿灯背后那套系统的时间实时同步为前提。
车辆时钟如果与红绿灯时钟存在秒级误差,意味着车辆起步的延迟或者提前,很难保障交通效率和交通安全。传统汽车是不需要考虑时钟同步的,大多数人的车辆时钟与手机时钟都存在分钟级误差,但这并不影响驾驶安全。对于尚不具备高等级自动驾驶功能的车辆而言,时钟同步同样并不重要。事实上,目前绝大多数智能网联汽车的导航娱乐系统时钟与车辆自动驾驶系统的时钟都做不到同步,交通信号灯之间更不存在高精度的时钟同步机制,更不存在车辆与交通信号灯之间的时钟同步。
对于自动驾驶车辆而言,除了时间,还需要空间位置这个关键参数。有了时间、位置,车辆的一切行为都是可计算、可预测的。自动驾驶车辆借助摄像头、雷达建立的空间地图中,自身和道路设施究竟位于什么坐标点,是由各自所依赖的地图和算法模型决定的,不同车辆对于彼此处于什么坐标点,如果不基于统一的空间基准,自然会得出不同的结论。如果所有车辆都使用北斗,那么借助北斗的纳秒级授时和分米甚至厘米级定位能力,就能够解决上述时空管理问题[2]。
2 时空基准是机器智能时代的数据质量基础设施
中国科学院杨元喜院士在最近撰写的《泛在感知与航天测绘》一文中指出:要解决泛在感知信息与测绘信息的匹配与融合问题,首先需要解决感知信息的时间标签和空间位置问题,然后需要解决泛在感知信息与全球影像信息或地理空间信息的快速配准难题,进而建立泛在感知信息的时间序列分析或空间统计分析模型和方法[3]。把杨院士这篇论文的结论,用在汽车自动驾驶领域可以验证本文的观点。
首先,得给车辆摄像头、毫米波雷达获取的道路、车辆和行人数据打上时间戳和位置戳,这2 个戳都得溯源国家时间和位置基准,否则难以得到各方承认。其次,得解决上述数据与地图的快速匹配难题,这个需要借助机器学习。最后才能借助时空数据的智能计算,实现真正意义上的可信、安全自动驾驶。
所以,一个看似对人类驾驶者简单的时空感知问题,到机器自动驾驶阶段,就需要解决时间高精度同步、统一位置基准等问题,反而变得复杂无比。要将这个复杂问题简单化,必须建立国家数字质量基础设施,借助计量、标准、检测、认证等质量技术手段,推动具备自动驾驶功能的车辆、道路、云计算平台、通信网络以及实时地图,统一溯源国家时空基准。
笔者此前撰写论文指出:数字经济亟需国家数据质量基础设施。进入数字经济时代,无论智慧城市、工业互联网还是智能网联汽车,不再仅局限于用一套软件解决问题,而是一个软件要跟其他的软件和实时环境测量数据进行数据交互。两个软件之间的交互,本质上是机器与机器的交互,这种交互要保障人类的安全,就必须确保参与交互的机器所输入、输出的数据是可信的。要解决可信问题,首先就要解决数据的时空属性可信,其次才是其他测量数据的可信。随着国际单位制的量子化,一切测量数据都是时间的函数,因此,有了可信的高精度时间数据,一方面可以对业务数据进行校准,另一方面可以借助可信时间戳解决业务数据加密认证等问题。
对于智能网联汽车而言,一个迫在眉睫的应用就是对车载雷达、摄像头进行实时校准。虽然汽车产业可以借助雷达和摄像头的图像进行自校准,但这种自校准本身并不溯源相关测量基准,也无法自证清白。这导致一旦车辆发生恶性质量安全事故,要区分清楚是传感器质量问题导致机器错误决策,还是算法问题导致机器错误决策,亦或者是路侧控制单元给出的路况数据错误导致车辆错误决策,并没有第三方可以提供可信证明。
同样,道路安全治理也难以依赖未经第三方验证的车联网数据就开展远程执法。我们目前在街头看到的“电子警察”,本质上只是个取证摄像头,真正执法的仍然是人类警察,而不是“电子”。要真正实现“电子警察”实时智能化执法,首先得有可信的第三方数据作为电子证据,而且这个证据必须从源头上做到“时空可信”。这样,当车主拿出不在现场的其他图像、视频证据时,也得具备同等的时空可信度,否则警方的电子证据就具有更高的可信度。
3 结束语
我们在传统汽车时代已经错失掌控标准话语权的产业机会。在数字时代,真正的标准话语权,并不是看得到的那些软硬件专利、标准,而是看不到的时空管理的数据基准、标准话语权。在数字世界,掌控了时间和空间定义的话语权,就掌控了数字世界的规则制定权。毫无疑问,从物理疆域延伸到数字时空疆域,只有大国才具备争夺话语权的资格[4]。
要保障中国道路智能网联汽车的行驶安全,必须以统一的时空管理基础设施为前提,目前产业界还缺乏对这一问题重要性的共识,希望本文能抛砖引玉,引发各方关注,共同推动这一数字基础设施的建设。
