SWISS整流器的无源自抗扰控制
2023-05-16徐润东李建国张雅静王久和
徐润东,李建国,张雅静,王久和
(北京信息科技大学 自动化学院,北京 100192)
0 引言
SWISS整流器由Kolar教授于2011年提出,它是一种降压型整流器,因具有更宽的输出电压范围、可以限制负载电流、控制方式容易实现等优良特性,在通信设备、大功率照明、电动汽车等领域中得到大量应用[1]。随着SWISS整流器应用领域的扩大,对其输出电压的精度要求越来越高,进而推动了SWISS整流器高精度控制的研究。
工业中常用的SWISS整流器控制方法是比例积分(proportional integral,PI)控制,其控制器设计简单且参数调节方便,但不适用于对输出电压精度较高的场合[2-3]。文献[4]分析了电网侧电流畸变的原因,提出了一种先进的调制方案和阻尼策略,但是使用该策略存在超调大、响应速度慢的问题。文献[5]提出了一种基于单周期控制的非线性控制策略,该策略减少了直流侧电感电流的纹波对输入电流正弦控制的影响,但是这种策略是单回路控制,短时间无法调节电感电流的过冲,系统可能会因为电流过冲而跳闸。文献[6]提出了一种模糊PI控制的策略,即采用模糊集理论,建立PI参数间的函数关系并实时修正PI参数,该策略提高了输出电压的稳态精度,但控制器的设计较为复杂。
无源控制(passivity-based control,PBC)是由R.Ortega和M.Spong提出,是一种基于能量耗散的非线性控制策略,它利用能量耗散来控制稳定性,并通过注入阻尼来跟踪给定对象。PBC对系统参数的变化和外部干扰具有很强的鲁棒性,并且控制器的设计相对简单。目前,PBC广泛应用于整流器、并网逆变器和DC-DC变换器等领域[7-8]。与线性控制和其他非线性控制策略相比,电流内环采用PBC控制易于设计和实现,可以一定程度上改善SWISS整流器的动态和静态性能。
自抗扰控制技术(active disturbance rejection control,ADRC)是由韩京清教授提出的一种非线性鲁棒控制策略,它不依赖被控对象精确的数学模型。它的核心思想是实时估计出系统的状态变量和总扰动,并及时对总扰动进行补偿。传统非线性ADRC存在控制器设计参数过多、调节参数困难、难以分析稳定性等问题。针对这些问题,高志强教授将非线性ADRC进行简化,提出了线性自抗扰控制技术(linear active disturbance rejection control,LADRC)。目前,LADRC已经应用于储能逆变器、DC-DC变换器和永磁同步电机等领域[9-11]。与传统线性控制策略相比,电压外环采用LADRC控制可以为电流内环提供期望电流值,提高SWISS整流器的鲁棒性和快速跟踪性。
针对SWISS整流器输出电压和负载波动以及现有方法控制精度差的问题,本文提出一种线性自抗扰控制与无源控制相结合的控制方案,用于提高SWISS整流器的性能。首先建立SWISS整流器等值BUCK电路的欧拉-拉格朗日模型(Euler-Lagrange model,EL)模型,采用虚拟阻尼注入的方法设计了无源控制器,得到等值BUCK电路的无源控制率;然后,分别设计了改进的LADRC控制器(improved active disturbance rejection control,ILADRC)的线性扩张状态观测器和线性状态误差反馈控制律;此外,对PBC控制器和ILADRC控制器的稳定性进行论证。在此基础上,搭建基于Simulink的仿真模型并进行仿真研究。仿真结果表明,本文所提控制策略改善了系统的跟踪性能和鲁棒性能,比传统的PI双闭环控制、外环PI内环PBC控制有明显的优势。
1 拓扑及机理分析
图1所示为SWISS整流器的电路拓扑,由不可控整流电路、直流稳压电路、谐波注入电路,以及交流滤波电路构成。
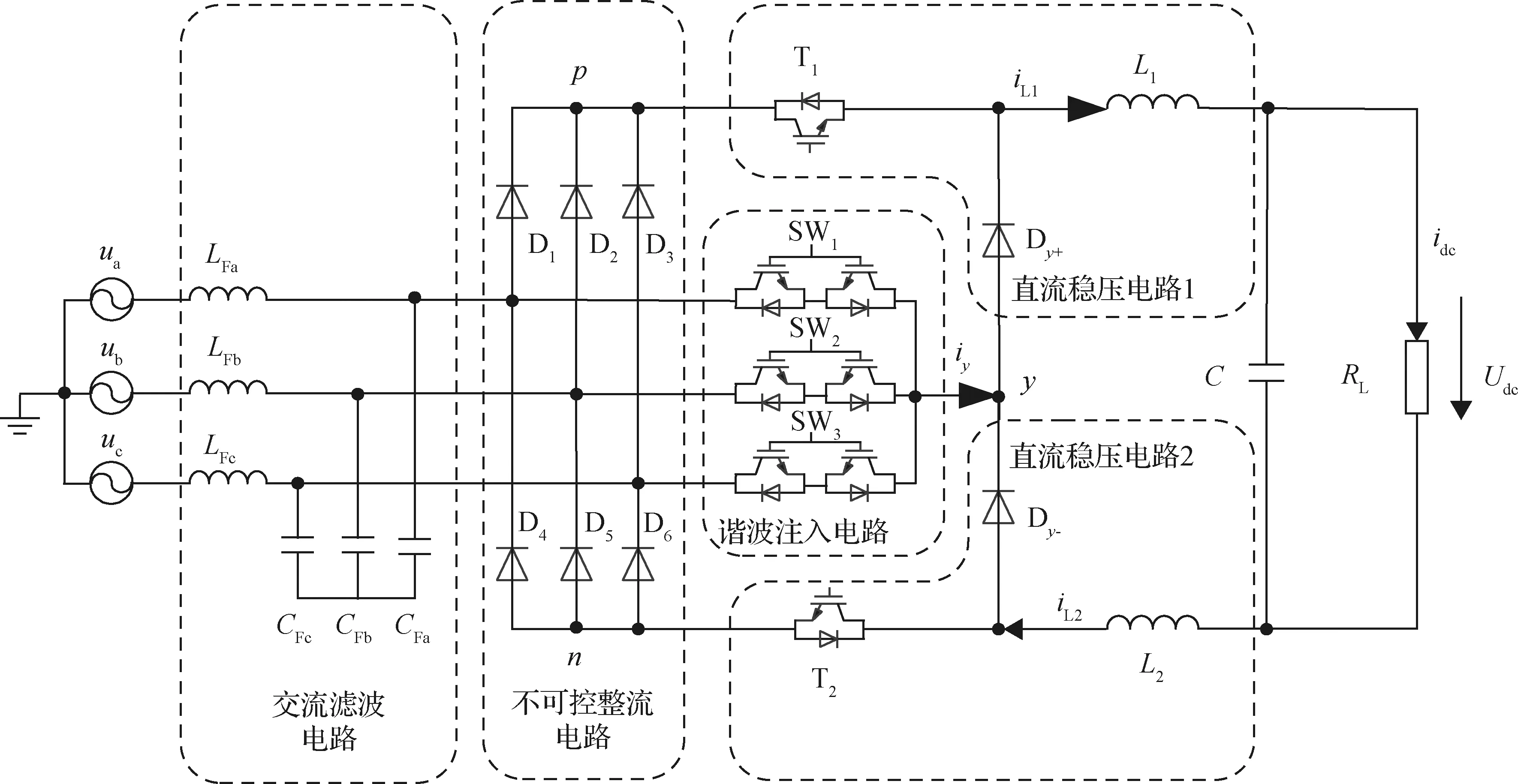
图1 SWISS整流器的电路拓扑
图1中,D1~D6为整流二极管,构成不可控整流电路,用于将交流电压变换为直流电压。开关管T1、续流二极管Dy+、直流侧滤波电感L1和开关管T2、续流二极管Dy-、直流侧滤波电感L2分别构成正极和负极稳压电路,用于稳定输出直流电压和大范围可调。SW1、SW2、SW3为双向开关,构成谐波注入电路,用于补偿输入电流死区,实现单位功率因数校正。滤波电感LFi(i为a、b、c三相)和滤波电容CFi(i为a、b、c三相)构成交流滤波电路,主要用于滤除高次谐波电流。
任意时刻,不可控整流器中三相只有两相有电流流过。针对不导通相,施加谐波电流注入控制。如表1所示(其中“1”表示导通,“0”表示关断),控制SW1、SW2或SW3的导通,给不通电流的相引入一个电流支路,补偿电流死区,来实现三相输入电流的正弦控制。这样可以解决因电流输入时存在较大死区而导致的输入电流畸变严重的问题,从而降低输入电流的谐波、提高SWISS整流器的功率因数。通过控制开关管T1、T2的占空比,可以实现输出电压的调节。
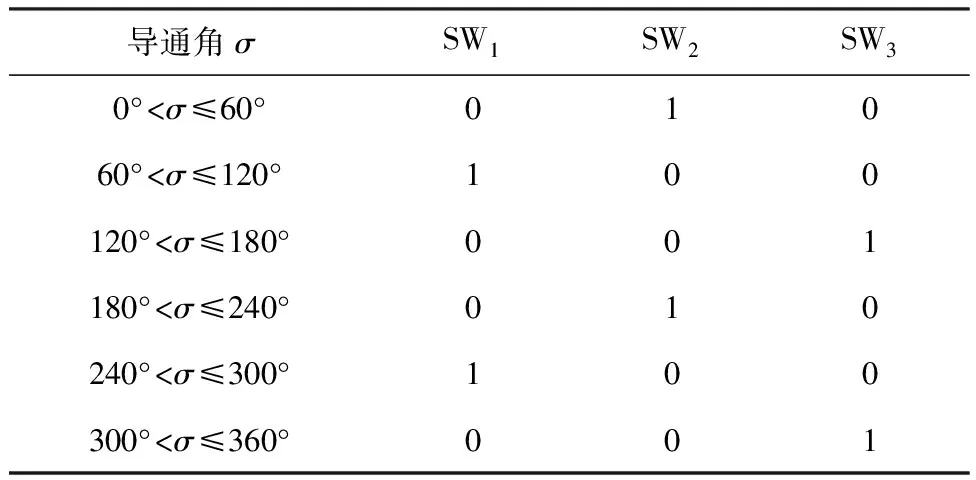
表1 谐波注入电路的开关状态
2 SWISS整流器数学模型
假设SWISS整流器工作在电流连续导通模式下,电流通路中所有元器件均为理想元器件且忽略线路的导通损耗。图2为SWISS整流器的4种工作状态,根据其工作状态,建立系统的数学模型,其中L1=L2=L,iL1=iL2=iL。选取电感电流iL、电容电压即输出电压Udc为状态变量。upn、upy和uyn分别为p点对n点电势,p点对y点电势,以及y点对n点电势。当开关管T1、T2同时导通时,电流路径如图2(a)所示,列写KVL和KCL方程如式(1)所示。当开关管T1导通、T2截止时,电流路径如图2(b)所示,列写KVL和KCL方程如式(2)所示。当开关管T1截止、T2导通时,电流路径如图2(c)所示,列写KVL和KCL方程如式(3)所示。当开关管T1、T2同时截止时,电流路径如图2(d)所示,列写KVL和KCL方程如式(4)所示。
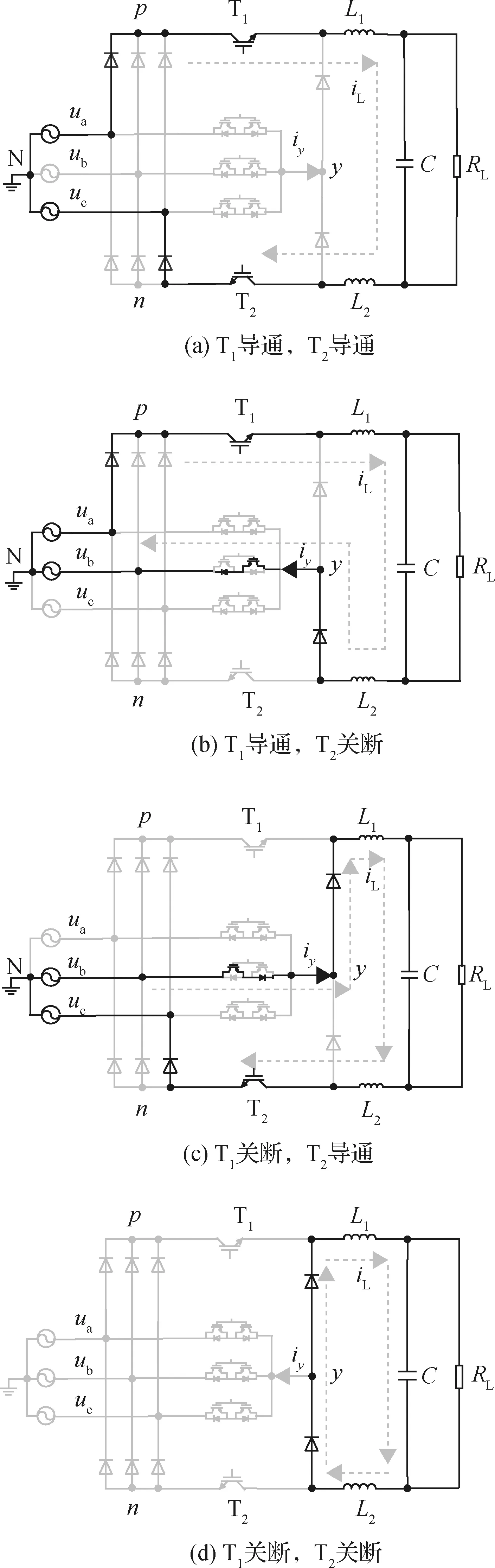
图2 四种工作状态的等效电路
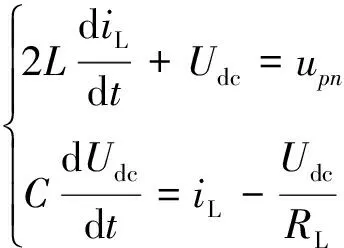
(1)
(2)

(3)
(4)
为了将各个工作状态的数学模型统一表示,定义开关函数为
(5)
则各种工作状态的EL模型方程可以统一表示为
(6)
将开关函数进行开关周期平均化处理,用对应开关的占空比D1、D2来表示,用状态变量的开关周期平均值重新表述式(6),可以得到系统开关周期平均模型:
(7)
由于D1upy+D2uyn≤0.866Umax,其中Umax为线电压的峰值,可以定义等效占空比为
(8)
那么,式(7)可以表示为
(9)
根据式(9),SWISS整流器可以等效为BUCK电路,如图3所示。其中T为等效的开关管,对应的占空比为De,等值BUCK电路的等效输入电压源Ue=0.886Umax。
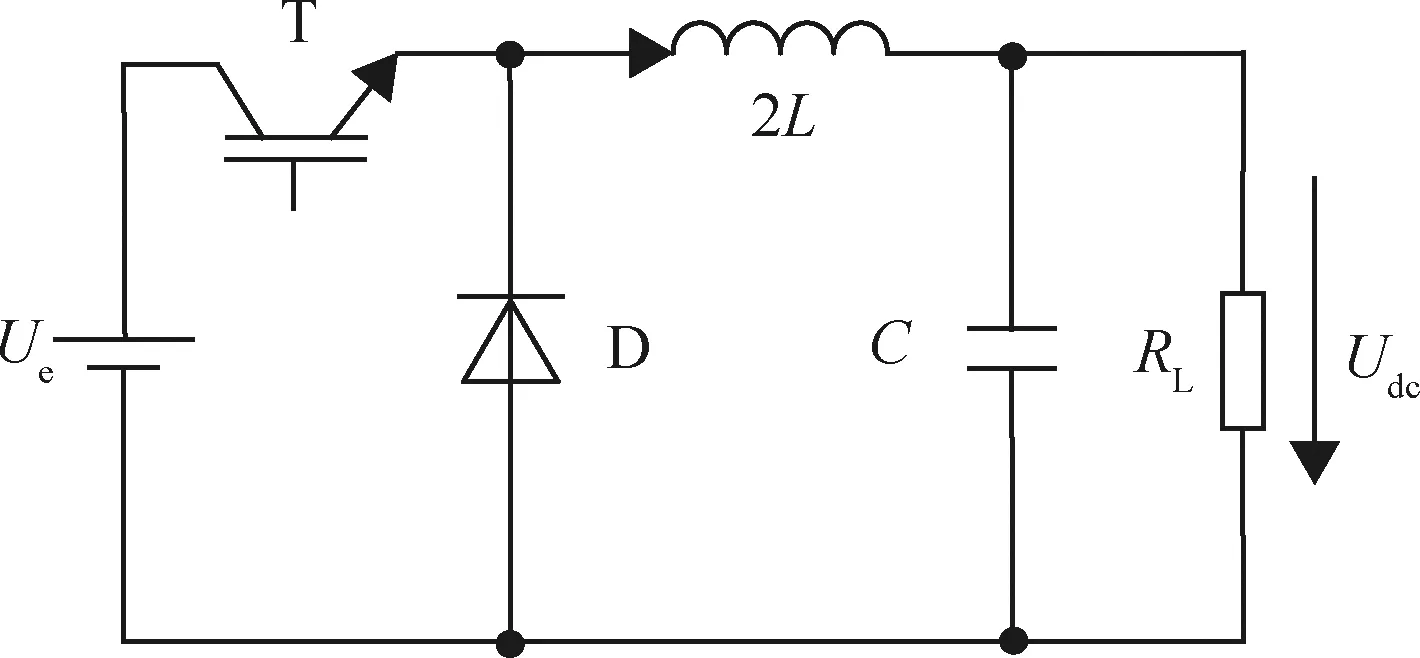
图3 SWISS整流器的等值BUCK电路
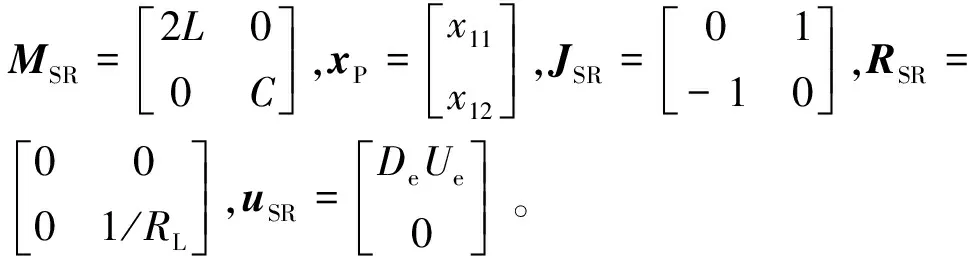
将式(9)写成 EL模型:
(10)
3 PBC与ILADRC控制器设计
3.1 电流内环PBC控制器设计
为使误差能量存储函数快速收敛到0,需要注入阻尼Ra1,在式(10)两端添加阻尼耗散项Ra,(Rai>0,i=1,2),Ra是正定的。
则有

(11)
取无源控制器
(12)
由于Ra是正定矩阵,求HSR(x)对时间的导数,可得
(13)
由式(13)可知,HSR(x)能够收敛到0,收敛速度的快慢取决于RSR+Ra。所以,式(12)所得无源控制器能够实现控制目的。

(14)

3.2 电压外环ILADRC控制器设计
ILADRC控制器可分为两部分,分别为改进型线性扩张状态观测器(improved linear extended state observer,ILESO)和线性状态误差反馈控制律(linear state error feedback,LSEF)。因此,如图4所示,ILADRC控制器设计可以分为ILESO和LSEF设计。本文ILADRC控制器应用于电压外环,选用二阶自抗扰控制器。
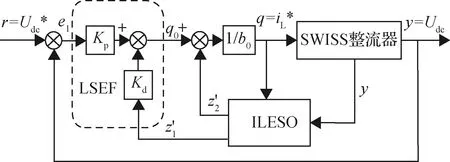
图4 二阶LADRC控制框图
3.2.1 ILESO设计

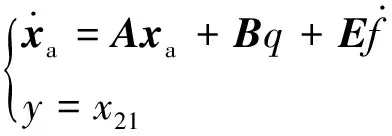
根据文献[12],SWISS整流器电压环的二阶自抗扰范式可以写为
(15)
式中:y为系统的输出;q为系统的控制变量;f为系统的总扰动。
(16)
根据式(16)设计三阶LESO为
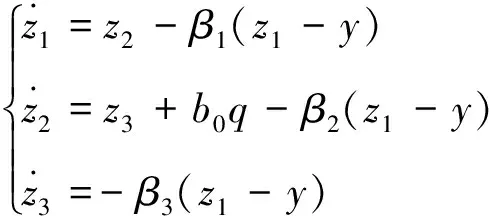
(17)
式中:z1为SWISS整流器直流侧输出电压Udc的跟踪信号;z2为SWISS整流器直流侧输出电压Udc微分的跟踪信号;z3为系统总扰动的跟踪信号;β1、β2、β3为LESO的增益,影响LESO的动态性能。由于SWISS整流器直流侧输出电压可直接测量获得,因此不需要对它进行估计,可以在式(17)中将该部分结构改进,构成改进的线性扩张状态观测器(ILESO):
(18)
根据文献[13]中极点配置的带宽整定法,将ILESO的极点全部配置在-ωo处,则观测器的特征方程满足下式:
(19)

3.2.2 LSEF设计
LSEF对ILESO得到的估计值与参考值的误差进行前馈补偿,使得误差趋向于零。选定合适的ILESO增益之后,ILESO的输出能够实时跟踪系统的状态。LSEF的控制律可以设置为
q=(q0-z2)/b0
(20)
式中:q0为LSEF的输出。
将式(20)代入式(15),可以发现系统可以简化为积分器串联型系统:
(21)
对于积分器串联型系统,通常使用比例微分控制,则控制律可以设置为
q0=Kp(r-y)-Kdz1
(22)

(23)
根据带宽法,令Kp=ωc2、Kd=2ωc,ωc为系统控制器的带宽,那么选择合适的控制器带宽就能使系统稳定。
为了对比ILESO和LESO两种观测器的性能,接下来对两种观测器的频域响应进行对比分析。根据带宽法,由式(17)可求得ILESO的扰动传递函数为
(24)
由式(18)可求得LESO的扰动传递函数为
(25)
根据式(24)和式(25),选取相同的观测器带宽,频域响应曲线如图5所示。从图5中可知,与LESO相比,ILESO减小了相位的滞后,在低频范围内扰动观测能力更强、响应速度更快。缺点是ILESO在高频范围内衰减缓慢,容易受高频噪声干扰,可以在ILESO总扰动通道上串联一个惯性环节,实现对高频噪声的滤波。
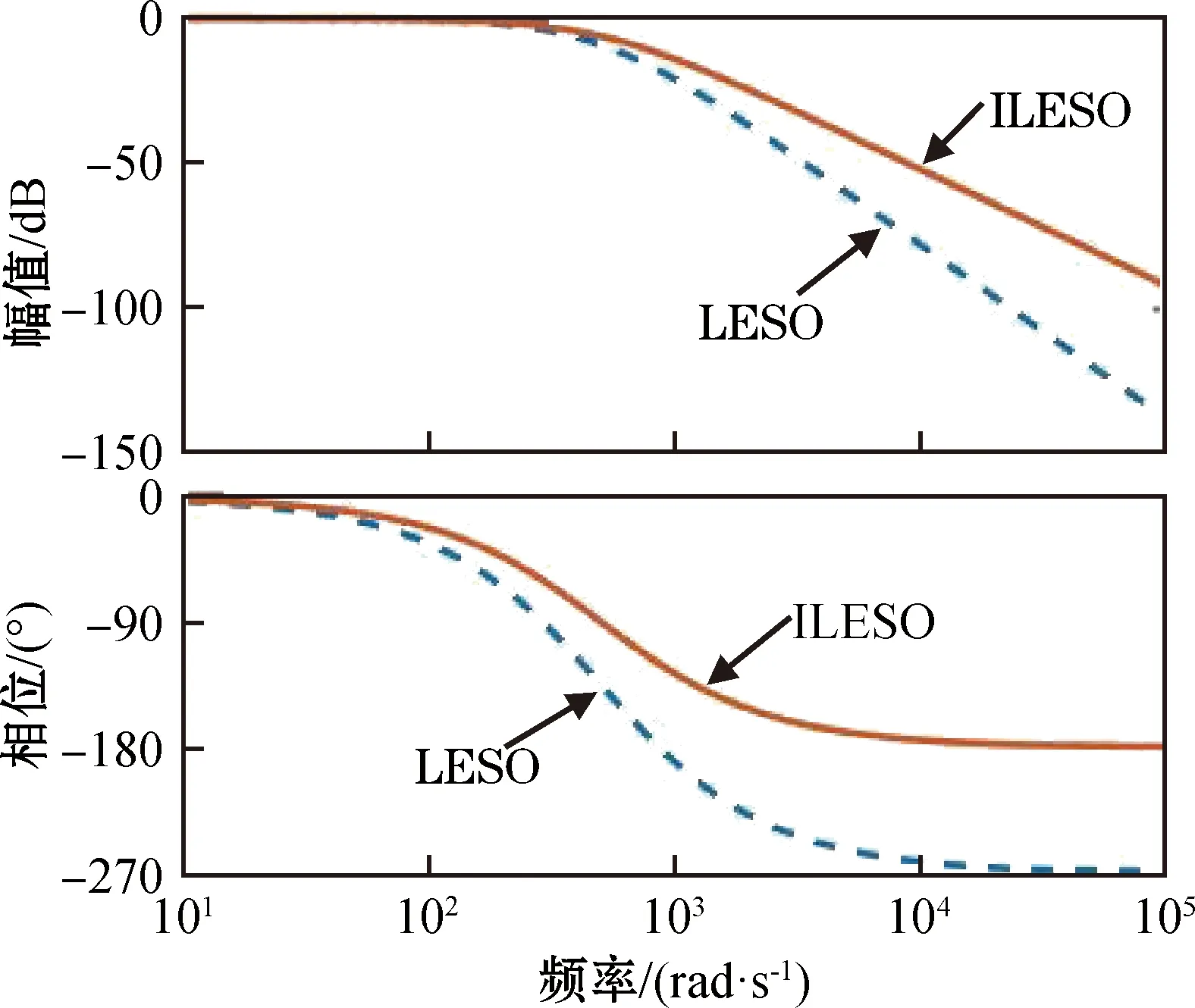
图5 LESO与ILESO扰动观测传递函数频域特性曲线
电感电流的期望值为
(26)
为了使占空比的大小跟随电网电压的角度,流过的电感电流受到电压波形的控制,本文加入前馈回路,对整流桥两端的电压进行采样,取它的最大值和最小值,然后进行归一化处理。将电流内环的输出信号与前馈信号相乘,即可得到开关管T1和T2的控制率D1和D2为
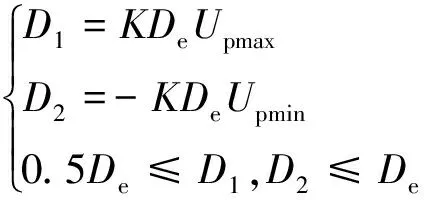
(27)
式中:K=2Udc/3UN2,UN为电网相电压幅值;Upmax为电网相电压最大值;Upmin为电网相电压最小值。
4 仿真研究
为了验证本文所提策略的有效性,在Matlab/Simulink仿真软件中搭建如图6所示的仿真模型并进行仿真分析。同时为验证其优越性,与 PI双闭环控制、PI+PBC控制方法相比较。SWISS整流器的主电路参数见表2,控制器参数见表3。
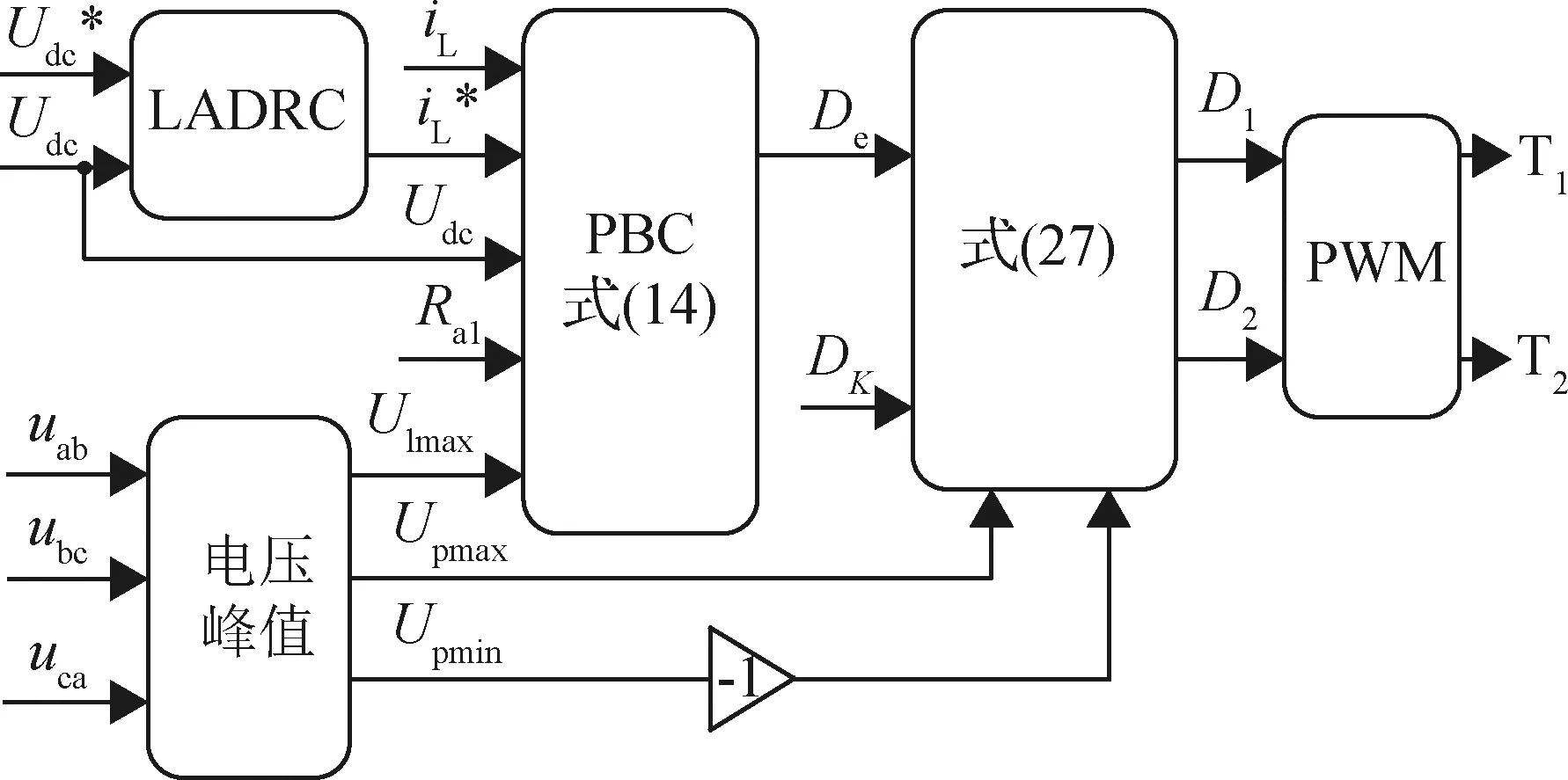
图6 SWISS整流器无源控制框图
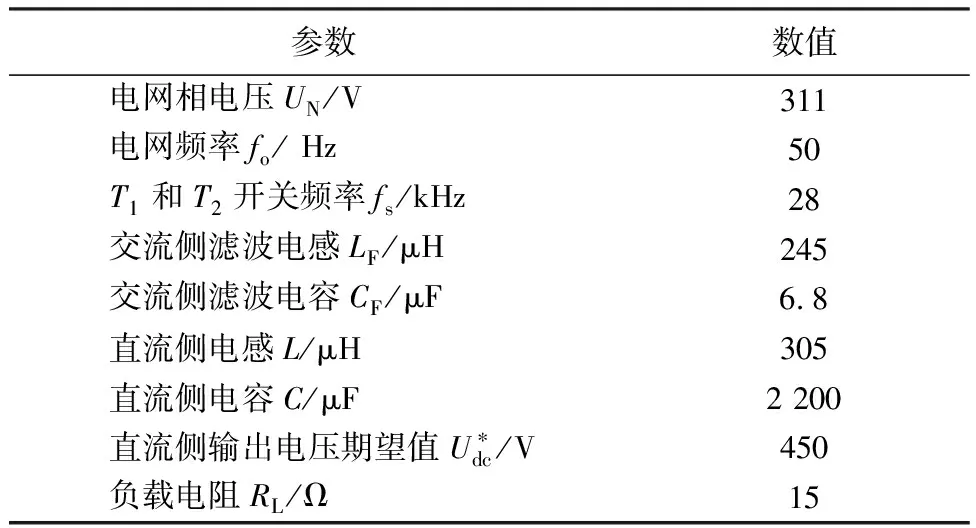
表2 SWISS整流器的主电路参数
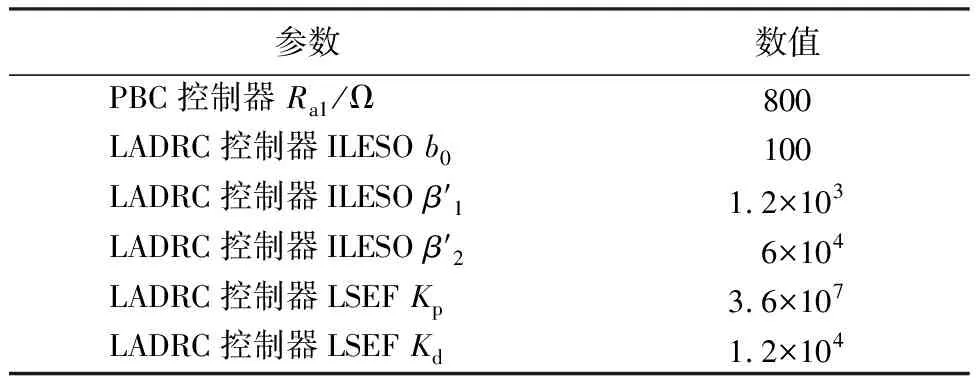
表3 SWISS整流器的控制器参数
4.1 直流特性
为了避免启动时产生较大的冲击电流,本文对给定信号进行柔化处理。在不增加任何扰动的情况下,SWISS整流器的启动过程如图7所示。直流输出电压的给定值为350 V,采用PI双闭环控制的方法,输出电压的超调量为2.44%,调节时间为0.075 s,稳态时电压纹波为0.4 V;采用PI+PBC控制的方法,输出电压无超调,调节时间为0.065 s,稳态时电压纹波为0.8 V;而采用本文所提ILADRC+PBC的方法,输出电压无超调,调节时间仅为0.05 s,稳态时电压纹波仅为0.01 V。
改变输出电压时系统的响应曲线如图8所示。在0.1 s时,输出电压由350 V阶跃变化为 450 V,主电路参数与所接负载大小保持不变。采用PI双闭环控制的方法,输出电压波动为3.8 V,调节时间为 0.08 s;采用PI+PBC控制的方法,输出电压无波动,调节时间为 0.06 s;而采用本文所提ILADRC+PBC的方法,输出电压无波动,调节时间为 0.04 s。
考虑到SWISS整流器需要工作在负载突增或者突减的情况下,所以验证系统在负载扰动情况下的动态性能十分必要。在0.2 s时,主电路参数和输出参考电压保持不变,负载RL由15 Ω→30 Ω;在0.25 s时,主电路参数和输出参考电压保持不变,负载RL由30 Ω→15 Ω。负载突变时系统的响应曲线如图9所示。采用PI双闭环控制的方法,输出电压波动为14 V,调节时间为0.035 s;采用PI+PBC控制的方法,输出电压波动为15 V,调节时间为0.025 s;而采用本文所提ILADRC+PBC的方法,输出电压波动仅为5.6 V,调节时间仅为 0.013 s。
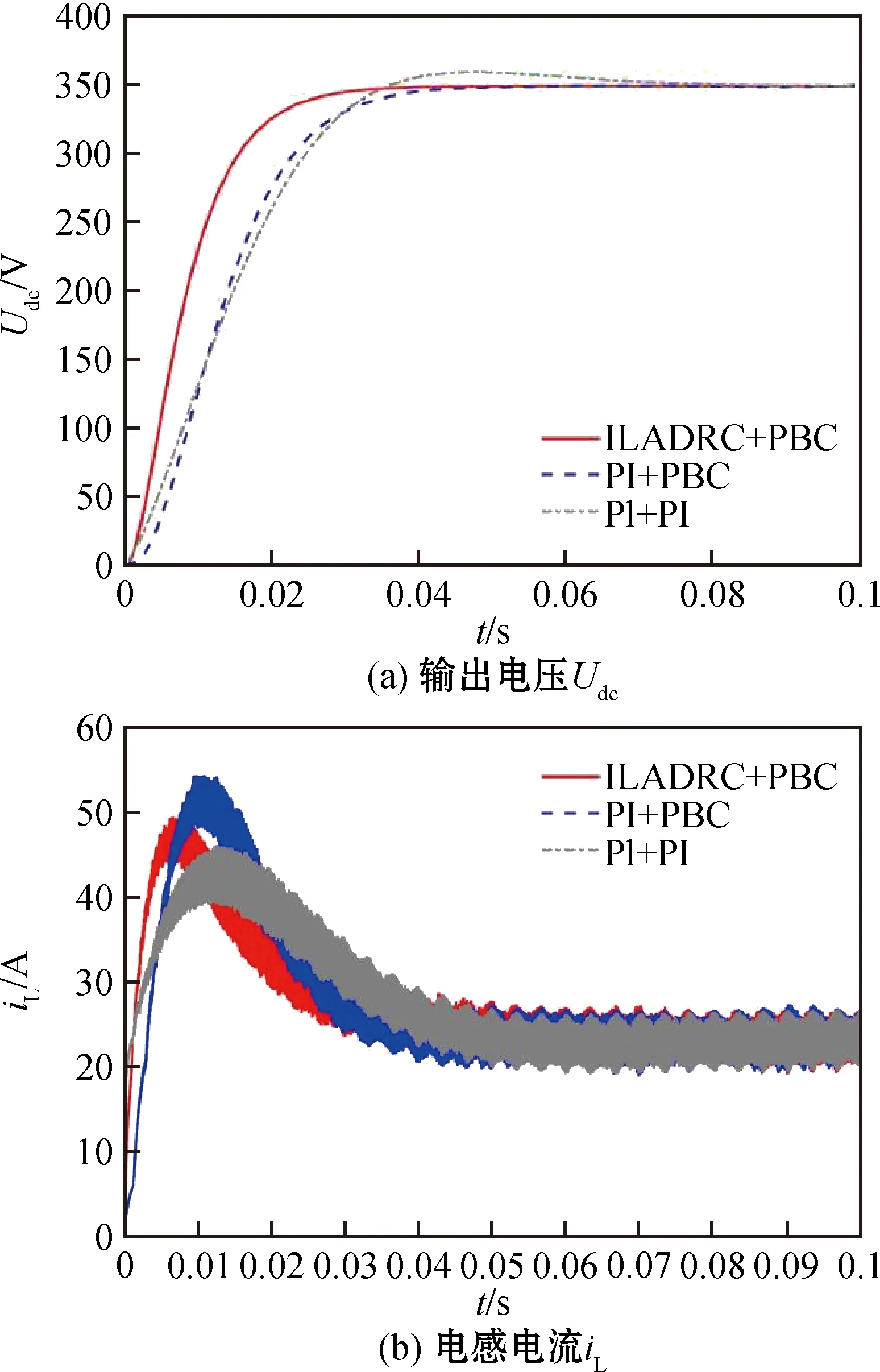
图7 启动时系统的响应曲线
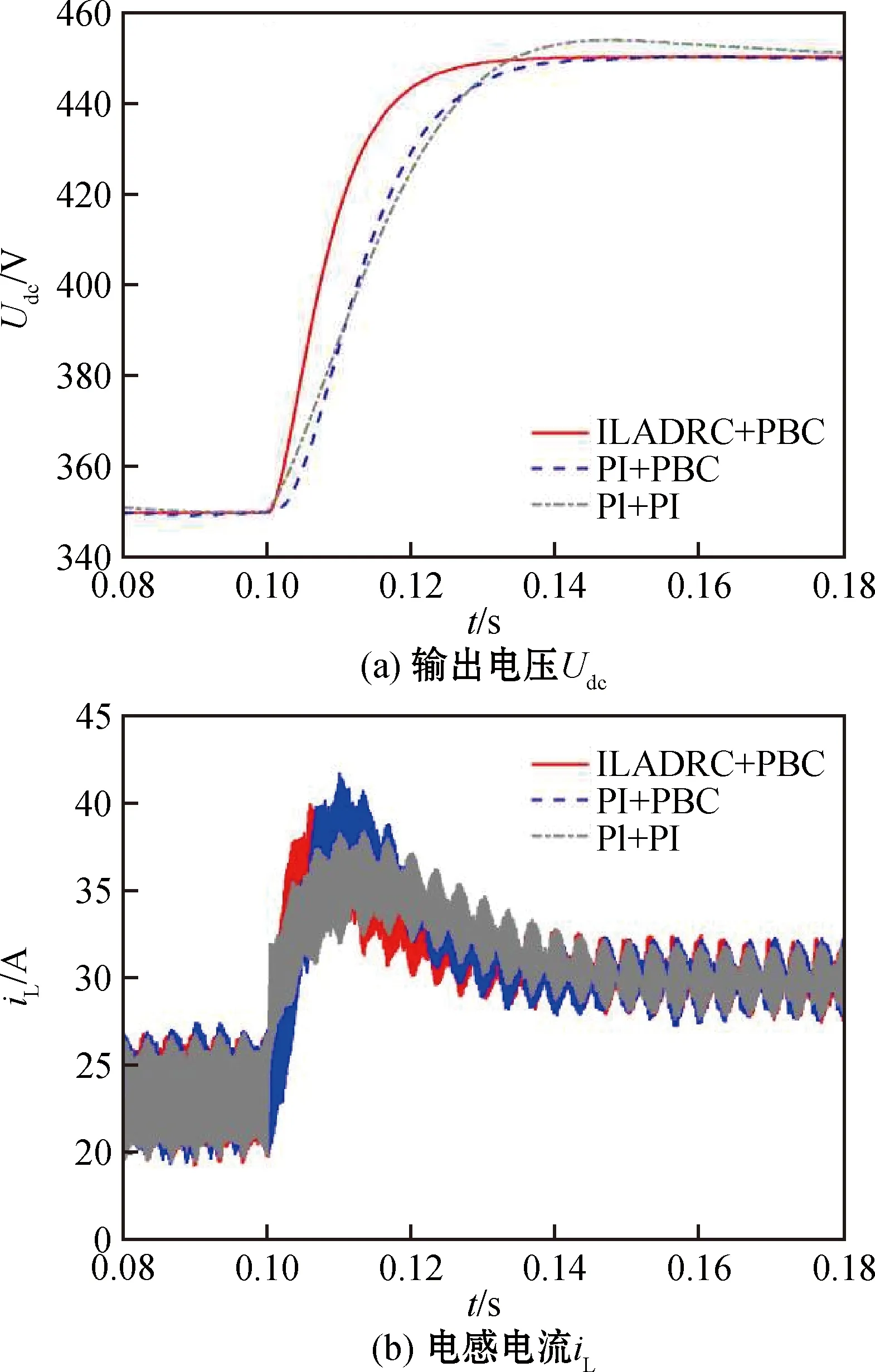
图8 改变输出电压时系统的响应曲线
图9 负载突变时系统的响应曲线
4.2 交流特性
SWISS整流器作为一种三相降压型PFC电路,能否单位功率因数运行是衡量SWISS整流器性能的重要指标。图10为采用本文所提ILADRC+PBC的方法交流侧a相的电压ua和电流波形ia。在t1=0.1 s时,输出电压由350 V阶跃变化为 450 V;在t2=0.2 s时,负载RL由15 Ω→30 Ω;在t3=0.25 s时,负载RL由30 Ω→15 Ω。从图10中可以看出,各种工况下,输入电流的相位都可以跟随输入电压的相位,并且正弦度都很高。图11为交流侧a相电流在50 ms达到稳定时,取一个周期的电流谐波含量的FFT分析结果。采用本文所提ILADRC+PBC的方法,输入电流的总谐波畸变率(total harmonic distortion,THD)为3.76%,能够实现单位功率因数校正功能。
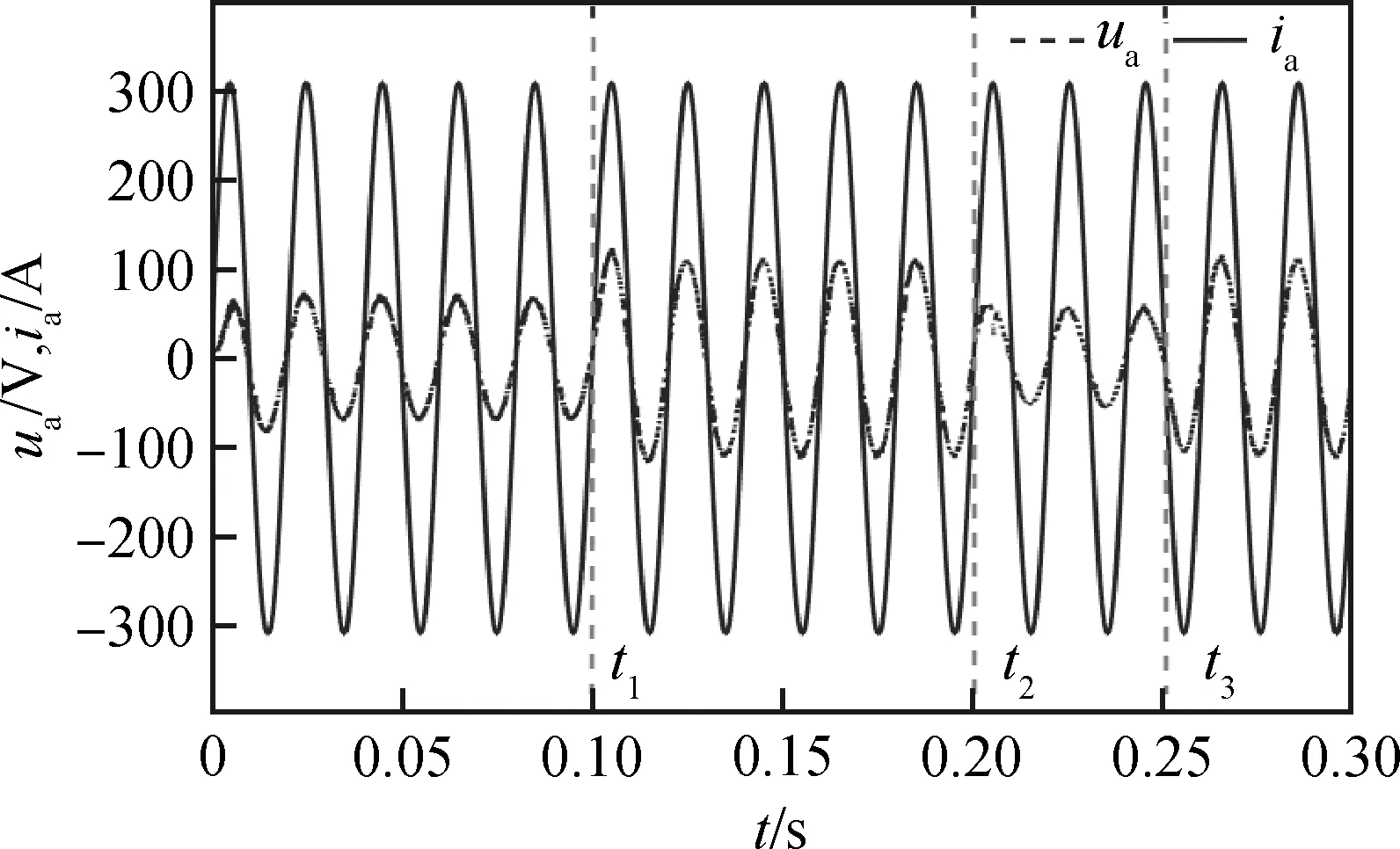
图10 a相电压电流波形
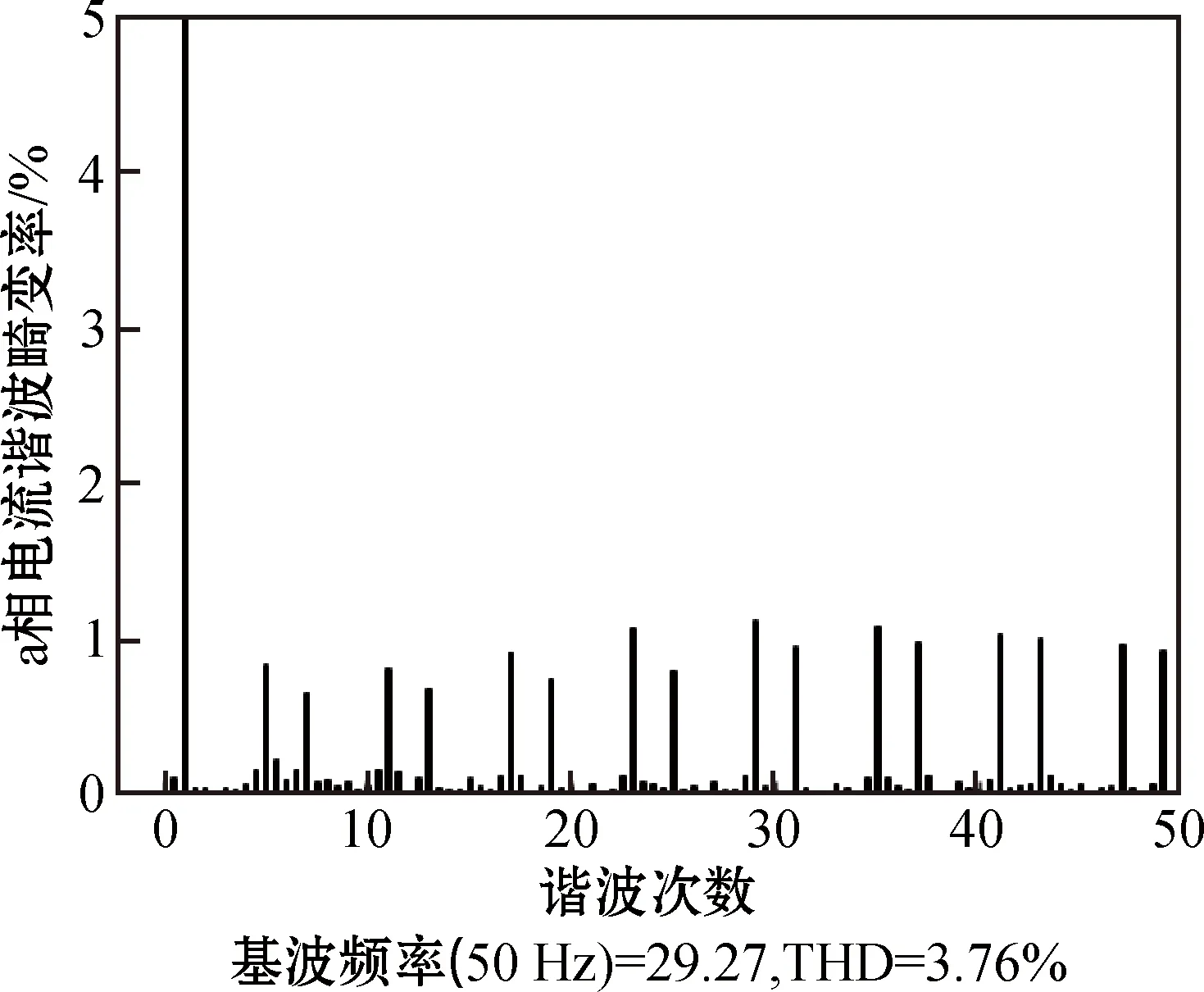
图11 a相电流谐波分析
5 结束语
本文以SWISS整流器为研究对象,对其电路拓扑进行简要分析,建立了SWISS整流器的等值BUCK电路模型,提出了一种线性自抗扰控制与无源控制相结合的控制策略。针对直流侧电压控制,采用ILADRC控制方法,用来抑制输入电压波动、负载电阻变化等干扰。仿真结果表明,该策略在单位功率因数下运行时,网侧电流的正弦度高,THD值较低;与PI双闭环控制、PI+PBC控制相比,其直流侧输出电压稳定性更高且抗干扰性能更强,验证了本文所提控制策略的有效性及可行性。该控制策略也可推广到其他整流器或变换器。
