术前骨折虚拟复位结合术中两点定位法螺钉固定特殊骨折块的初步研究
2023-05-09郑晓晖
郑晓晖,王 锋
骨折良好复位和精准内固定是骨科医师致力追求的目标,也是后期良好康复的基础。一些特殊部位的骨折块,如腕舟骨、跟骨载距突、肩胛骨喙突骨折,属于必须获得良好复位和固定的骨折,但因骨块形态不规则[1-3],内固定螺钉置入难度相当大。笔者设计术前骨折虚拟复位、虚拟内固定物导入,结合术中导向器两点定位,以虚实结合的方法准确打入内固定螺钉,可极大降低手术难度,已实施3例,效果满意。
1 临床资料
1.1 导向器及骨折虚拟复位法 导向器由合肥市五洋医疗器械有限公司生产,为多功能瞄准器Ⅱ型,产品编号:218078。CT机为东芝16排螺旋CT,以层厚1 mm常规扫描后,DICOM格式数据输入Mimics 14.0软件(由南方医科大学基础医学院人体解剖教研室提供)。将阈值设定(thresholding)调整为满足获取最大骨折块信息的数值(默认值为226),在蒙版(Mask)上执行Region Growing命令选定感兴趣区域,以Calculate 3D from Mask完成骨折的三维重建,此时可多角度观察骨折的真实空间形态。在3D Objects中,运用SegmentationEdit Mask in 3D工具以医师对骨折边界的判断为基础,分离出目标骨折块使之便于虚拟复位。菜单操作 SimulationReposition,交替使用Move with Mouse 和 Rotate with Mouse功能将骨块虚拟复位。在MedCAD菜单中用CylinderDraw工具可在立体空间上画出圆柱体,以此作为虚拟内固定螺钉,不断调整其空间位置,直至在三维平面上都能证实其位置良好。此时该圆柱体进、出骨折块的位置即可作为实际螺钉的进、出针点,可以测量进出针点相对于明确骨性标志的距离,作为术中真实选择的判断依据,还可以改变圆柱体的直径以判断适合的螺钉直径,也可以测量圆柱体骨内段的长度作为螺钉长度的依据。
1.2 治疗方法
1.2.1 病例1 男,37岁。打篮球时摔伤,左手掌撑地,出现左腕部肿胀、疼痛、活动受限,“鼻烟窝”处压痛明显。X线拍片、CT扫描+三维重建示:左腕舟骨腰部骨折(Herbert-Fisher分型:B2)。术前虚拟复位并制定手术方案。受伤至手术时间为7 d。手术采用双切口:腕背偏桡侧纵弧形切口约4 cm,经拇长伸肌腱鞘的尺侧进入并打开关节囊,显露舟骨骨折,复位骨折端畸形;掌侧切口以舟骨结节为中心,长约2 cm,沿大鱼际肌纤维方向钝性分开,显露大多角骨嵴。进针点为舟骨的桡骨关节面近端弧形顶点沿舟骨长轴方向旁开4 mm处;出针点为大多角骨嵴顶点偏外侧3 mm处。在进、出针点表面安放导向器,打入导针,透视证实位置良好后,打入一枚2.5 mm无头空心加压螺钉。患者术前术后CT见图1。
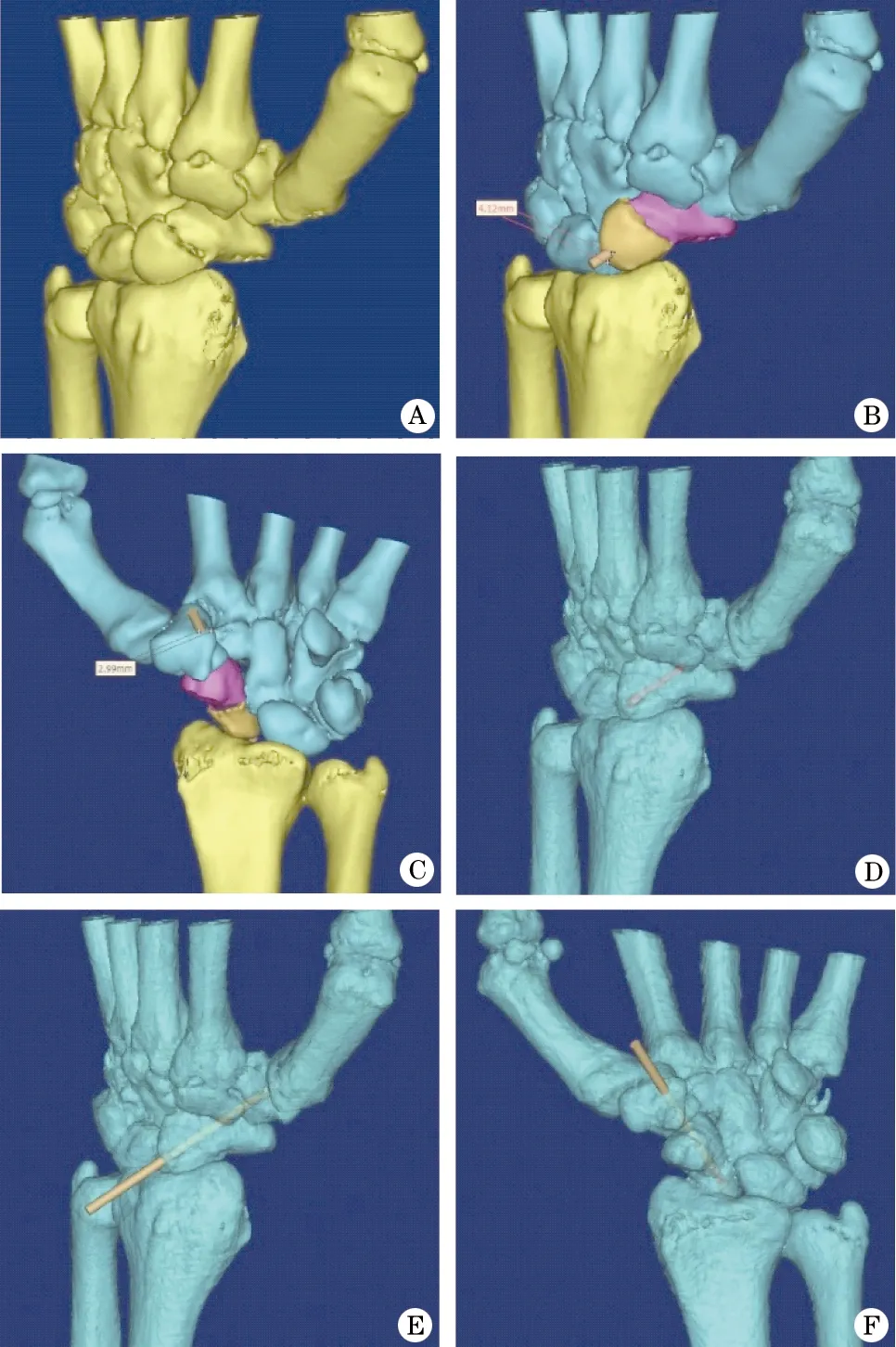
图1 左腕舟骨腰部骨折患者(男,37岁)术前及术后CTA.术前CT三维重建;B、C.虚拟复位,手术前设计;D.术后CT三维重建;E、F.术后螺钉固定位置复盘。
1.2.2 病例2 女,50岁。高处坠落伤致左足跟部肿痛、淤青,足跟无法着地行走。X线拍片、CT扫描+三维重建示:左跟骨载距突骨折(Sanders 分型:ⅡC),左跟骨结节内侧突骨折。术前虚拟复位并制定手术方案。受伤至手术时间为10 d。手术采用双切口。外踝下方横弧形切口约4 cm,切断腓骨肌下支持带,牵开腓骨肌鞘管,打开距下关节囊,显露跟骨后距关节面,找到进针点:一处位于Gissane角顶点向下、向前各5 mm处;另一处位于跟骨后距关节面弧度顶点向圆心方向旁开5 mm。内踝下方横行切口约2 cm,部分切开屈肌支持带,在胫后肌腱上方觅及并定位载距突的边界,在其顶点两旁各选取一处作为出针点。复位骨折端,触诊断端间的缝隙消失后,在进、出针点表面分别安放导向器,打入导针,透视证实位置良好后,按正常步骤打入二枚4.0 mm无头空心加压螺钉。患者CT及X线片见图2。
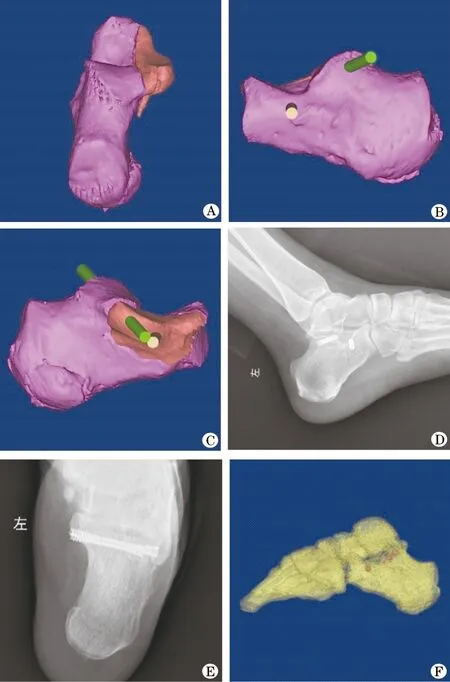
图2 左跟骨载距突及跟骨结节内侧突骨折患者(女,50岁)术前及术后情况A.术前CT三维重建;B、C.虚拟复位,手术前设计;D、E.术后X线片;F.术后CT三维重建。
1.2.3 病例3 男,30岁。骑电动车被电线绊倒摔伤,左侧肩背部先着地撞向水泥地面,出现左肩部疼痛、活动受限。X线拍片、CT扫描+三维重建示:左喙突骨折波及肩胛盂和肩胛骨上缘,肩锁关节无脱位(Eyres分型:ⅤB)。术前虚拟复位并制定手术方案。受伤至手术时间为7 d。手术采用双切口。切口一,肩峰指向肩胛骨内上角的直切口,长约12 cm。顺冈上肌前、后钝性分离,显露肩胛骨上缘骨折,见其延及喙突基底部和肩胛盂,骨折端间最大分离移位约1.5 cm。该切口前方在切断部分三角肌锁骨前上缘附着后,可显露喙突并探查喙锁韧带,术中证实该韧带完整性好。在喙突的水平部打入一枚3.0 mm骨圆针,作为摇杆控制喙突骨块的位置,以肩胛骨上缘骨块靠拢作为喙突骨折整体复位良好的标志。切口二,相当于小圆肌走行方向的纵切口,长约8 cm。深部经冈下肌和小圆肌间隙进入,定位肩胛骨外侧缘和盂下结节。进针点为喙突水平和垂直部的交界区;出针点为肩胛骨盂下结节。骨折复位良好后,在导向器的引导下打入一枚4.5 mm半纹空心螺钉。另以一块6孔微型LCP钢板桥接固定于肩胛骨上缘基底和肩胛冈之间,以增强喙突螺钉的稳定性并控制喙突骨块可能产生的旋转。患者相关影像见图3。
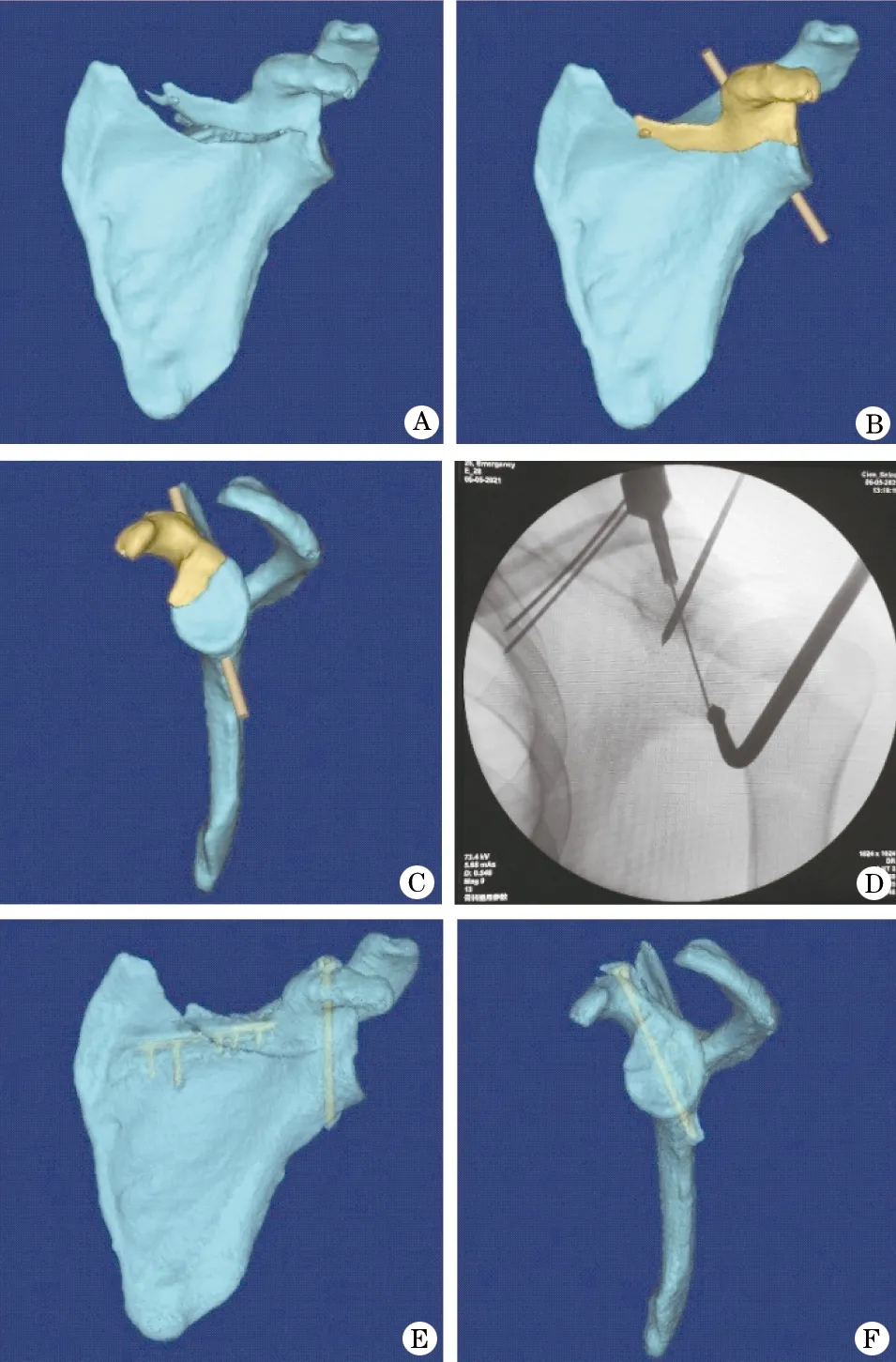
图3 左喙突骨折患者(男,30岁)术前、术中及术后情况A.术前CT三维重建;B、C.虚拟复位,手术前设计;D.术中透视(可见导向器);E、F.术后CT三维重建。
1.3 术后处理 腕舟骨及跟骨载距突骨折患者术后予以功能位石膏托外固定3周,解除外固定后开始无负重关节功能活动并逐渐增大活动范围,术后6周起小负荷负重练习并过渡至全负重状态。喙突骨折患者术后予以三角巾悬吊3周,逐渐开始肩关节钟摆运动,6周后过渡至全范围被动活动,术后3个月可以进行全范围负重活动。
1.4 评价指标 术后拍摄X线片,进行CT扫描和三维重建,了解内固定螺钉的位置是否与术前设计吻合。末次随访时腕舟骨骨折采取改良Mayo腕关节功能评分,跟骨载距突骨折采取美国足踝外科协会(American Orthopaedic Foot and Ankle Society,AOFAS)踝与后足评分,喙突骨折采取Constant-Murley评分进行评价。
1.5 结果 3例手术用时分别为90、70、150 min,手术切口全部甲级愈合,术后CT复查提示:内固定螺钉均按照术前规划准确打入骨折块内,病例1、2、3分别随访17、14、10个月,末次随访时评分分别为95、90、84分。所有患者术后均无感染、神经血管损伤等并发症。
2 讨 论
2.1 特殊骨折块螺钉固定方法选择回顾 本文所称“特殊骨折块”泛指临床上一些形态结构复杂,但功能重要须获得准确复位和坚强固定的骨折块,文中病例所列举的3种骨折即符合这种类型。腕舟骨骨折属于完全关节内骨折,必须获得解剖复位;跟骨载距突和肩胛骨喙突属于局部的“力学中心”,解剖地位重要,且毗邻重要的血管、神经结构。这几个部位骨折都需要准确复位和良好固定是大家的共识,但不规则的解剖形态和狭窄的置钉通道使它们获得精准固定并不容易[4-9]。
有鉴于此,很多作者做了有益的探索。传统的方法是,术中准确判定进钉点、牢记进钉方向的解剖角度数据、术中特殊体位透视以获得可靠置钉[10,11]。但即便如此,二维透视影像仍不能提供足够的术中三维空间支撑依据,吴晓明等[12]通过对喙突骨折螺钉固定术后CT检查发现,拉力螺钉没有位于正确位置而不能提供足够有效的把持力,可能是导致手术失败的主要原因。依靠透视辅助的置钉方法如果打入的导针位置不准确,则改变钉道并不容易,往往会再次打入原先的道内,对于如腕舟骨这样的小骨块,反复的克氏针进出,骨块内的多个钉道容易使螺钉固位力下降。因此传统方法置钉的准确性与术者经验密切相关,需要有很多积累和高超的技巧。
在机器人手术出现后,置钉精确性大大提高。但这类手术需要全麻,术中要确保置钉骨块手术全程处于固定位置,任何微动都会影响置钉精度,而且昂贵的设备更不是一般医院可以奢望的,这也让此类技术难以推广[13]。作为另辟蹊径而且成效比颇高的技术,3D导航模板辅助下的置钉技术近年来方兴未艾。将CT扫描数据输入计算机,设计针对手术部位个性化的3D导航模板,可以实现准确置钉[14]。但制作导航模板时,通常需要一个较大且骨性标识清晰的“面”,以便使导航模板卡在该“面”上与之贴合匹配,然后才能根据需置钉的方向设计导向孔柱。而一旦目标骨块太小,则导航模板的“面”就无所依托,模板就无法设计出来,肩胛骨喙突和腕舟骨都属于这种情况。在对特殊部位关键骨块精确固定的极致要求下,有作者专门研制了各类针对性的导向器[15-17],但这类专用器械上的角度和方向多是根据人体局部解剖参数的均值设定,精确程度因人而异,甚至有报道其与徒手技术相比并无明显优势[7]。
2.2 虚实结合的两点定位法 骨折的治疗模式已逐渐由“切开后再设计”的传统粗犷模式向“先设计再切开”的数字化精确模式转变[18]。骨折薄层CT扫描配合Mimics14.0软件,使临床医师可以自行完成骨折的三维重建和虚拟复位[19],在术前对骨折复位后形态有了直观的认识。对于腕舟骨、跟骨载距突、肩胛骨喙突等特殊骨折块而言,其可供置入内固定螺钉的通道狭窄,而虚拟内固定螺钉的引入,可以帮助术者规划螺钉在骨内最佳“行进路线”以便获得最好的把持力,同时可以准确了解螺钉进、出针点,直径大小、长度等参数。而术中使用点对点或两点法,在导向器的辅助下,两点一线实现螺钉进入的准确方向并不是一个新鲜的方法,是受运动医学科交叉韧带重建技术的启发,事实上张翅等[20]在跟骨载距突骨折的治疗中,使用的点对点定位器正是交叉韧带重建术中所使用的。这种方法的优点是,只要确定了进、出针点,在导向器的辅助下即可较精确完成导针打入和螺钉置放的任务。但这种方法的前提是骨折断端需要精确复位,术中如果骨折复位不良,则术中固定的方向就可能出现偏颇。因此,术前骨折的虚拟复位就成为术中准确内固定的“关键步骤”,因为只有在此基础上,术中才能知道螺钉置放的合理位置。以此步骤为“桥梁”结合局部解剖学知识,由“虚”到“实”即可完成切口设计、术中关键点把握等术前规划。
2.3 两点定位法的优缺点和注意事项 在术前骨折虚拟复位指导下,术中完成骨折复位后,只要按照规划好的点放置导向器,就可以按部就班完成螺钉固定,从而让手术更精准、高效,还可降低术中透视频次,从本文3例患者治疗的经验看,置钉的准确性是满意的。对于不能经常碰到同一部位特殊骨折的医师而言,有了本法辅助,可以降低手术难度、提升治疗水平。更大的好处是,可以在术后复查的CT三维重建图像中重叠真实钉道与虚拟圆柱体,对螺钉位置进行复盘评价,以完成手术的总结提高。本法的缺点是,为显露出针点需另做一个切口,增加了创伤和感染的机会。但笔者认为与错误置钉、不准确置钉、术中反复透视、手术时间延长等不利因素比较,这个缺点是可以接受的。
两点定位法在操作过程中还应注意如下问题:(1)术中准确复位仍是精准内固定的基础;(2)准确辨别进、出针点骨性结构是实现“精准”目标的必要条件,要选择可以被完整显露的部位作为进、出针点,且该部位尽量满足浅表易显露、周边毗邻结构简单、安全性高的要求,不要为了使用“两点法”而勉强为之;(3)必要的术前沟通,例如,对需要多一个切口问题应取得患者的认同;(4)由于笔者使用的导向器为市售产品,其内套筒直径与空心钉导针直径并不完全匹配,因此出针点略有偏差,但并不影响治疗的准确性。
综上所述,在3例特殊骨折块固定中使用术前虚拟复位、内固定螺钉路径规划,术中两点定位法在导向器的辅助下准确找到进、出针点,可以准确置入固定螺钉,方法简便易行,成功率高,适合同类病例少、手术经验不足的各队属医院开展。随着各部位关节镜技术的成熟,期待上述两点定位技术可以在关节镜辅助下完成,则可达到创伤更小、位置更精确的效果。
