基于常规助力与主动转向的车辆横向控制研究
2023-05-09王贵林韩同群徐忠国
王贵林,韩同群,徐忠国
(湖北汽车工业学院 汽车工程学院,湖北 十堰 442002)
新能源汽车的车载能源为动力电池,其储存的电能除驱动汽车行驶外,还要给其他系统供能,如:空调、电控悬架、转向系统等,要求这些系统耗电量低才不过多降低汽车的续驶里程,电动助力转向(Electric Power Steering, EPS)系统根据车速和方向盘转矩按需输出转矩,具有安全性高、轻量化和节能的优点。此外新能源汽车的结构参数与传统汽油车不同,比较典型的是转向轮轴荷的变化。因此,新能源汽车可继承传统汽油乘用车的EPS 系统,但要针对具体车辆进行开发和适配。自动驾驶技术的发展和高级驾驶辅助系统的应用,使得EPS 作为主要的执行机构可以更好地与整车控制器进行实时交互。车道保持辅助系统(Lane Keeping Assist, LKA)作为典型的横向先进驾驶员辅助系统功能之一,多以EPS 作为其执行机构[1]。
文献[2]考虑跨道时间与驾驶员转向的协调性,系统存在LKA 前轮转角控制模式和EPS 常规助力模式的切换。文献[3]建立了联合预警算法,利用驾驶员动作的辨识模型实现模式转换。系统在模式切换时导致LKA 开启时助力消失,存在安全隐患。文献[2]、文献[3]将LKA 的介入与退出依赖于跨道时间和驾驶员上,对车道线检测考虑较少。文献[4]在EPS 助力力矩上叠加转角控制力矩,但忽略控制权限的转移。文献[5]对LKA 退出策略进行了设计,并利用主、客观评价方法优化了策略参数,提高了LKA 系统的接受度,但并未考虑如何基于EPS 系统实现。
线性二次调节器(Linear Quadratic Regulator,LQR)可以让控制系统的动态范围由初始状态转换至控制目标状态的同时也可以让受控目标值达到最优,可兼顾系统的多个目标,实现最优控制。本文制定常规助力与基于最优控制理论的主动转向的控制策略,实现新能源汽车自动驾驶系统中LKA 的功能。
1 基于EPS 的LKA 结构
车辆横向控制主要有两类,一是主动变道,驾驶员根据行驶需要提前打转向灯再进行变道;二是非主动变道,是驾驶员无操作意识的状态下车辆偏离原车道的情况。针对非主动变道的就是LKA 系统。因此,EPS 系统需要扮演两种角色,一种是非驾驶辅助模式下的助力转向,另一种是驾驶辅助模式下的主动转向,如图1 所示。

图1 EPS 的常规助力模式与主动转向控制
2 EPS 模型及控制策略设计
2.1 EPS 数学模型
EPS 主要由转向柱、扭矩传感器、助力电机和齿轮齿条构成,建立其数学模型。
转向柱:
扭矩传感器:
助力电机模型:
齿轮齿条机构:
常采用脉冲宽度调制(Pulse Width Modulation,PWM)的方式驱动直流电机,利用传递函数近似表示为
式中,Td为方向盘转矩;Ts为扭矩传感器测量值;θc为方向盘转角;θp为小齿轮转角;xp为齿条位移;θm为电机转角;Up为脉宽调制控制电压;KPWM为脉宽调制放大系数;T为脉宽调制开关周期。
某品牌电动乘用车EPS 系统各模块参数如表1 所示。

表1 某品牌电动乘用车EPS 系统参数
2.2 EPS 控制策略设计
EPS 系统的控制策略可以分为上层的助力控制和下层的电机控制。
2.2.1 直线型助力特性曲线的设计
通过与曲线型、折线型比较,直线型助力特性曲线是最简单的,便于设计与调整[6]。式(6)为直线型助力特性曲线函数表达式。
式中,Tmax为电机助力转矩最大值;K(v)为车速感应系数;Td0为电机开始提供助力时方向盘转矩;Tdmax为助力转矩达到最大值时方向盘转矩。
由式(6)可知,表达式需要确定的参数主要有K(v)、Td0、Tdmax和Tmax。
方向盘输入转矩Td0的确定,一般情况下Td0的取值在[1,2]的范围内,本文选取Td0=1.8 N·m。
方向盘最大输入转矩Tdmax的确定,可以通过式(7)计算Tdmax:
式中,D为方向盘直径;Fmax为方向盘上的最大切向力。
最大助力转矩Tmax的确定:
当车辆在原地转向时,电机输出转矩最大。一般采用半经验公式,计算车辆的原地转向阻力矩[7]。
式中,Mrmax为原地转向最大阻力矩;f为轮胎与路面之间的摩擦系数,取值0.7;p为轮胎气压;m为汽车质量;b为质心到后轴的距离;a为质心到前轴的距离;L为轴距。
当电机提供的助力为0 时,驾驶员在方向盘上的最大转矩Tmax可以由以下的公式计算得到
式中,i为转向机构的传动比;η*为转向效率。
助力电机能够提供的最大助力转矩Tmax,可由以下公式计算得到
车感系数K(v)的确定:
汽车在原地转向时,对应的车速感应系数值最大,车速感应系数的最大值可以由以下公式计算:
计算得到车速感应系数的最大值为1.68。根据直线型助力特性曲线可知,车感系数与车速呈负相关。设计的车感系数为衰减速度较快的负指数函数:
通过前文公式所计算的车速感应系数的最大值,选取车速为100 km/h 时,所对应的车速感应系数,将其带入公式中,可以得到车速感应系数的函数表达式:
将参数代入直线型助力特性曲线的函数表达式中,计算得出电机目标电流与行驶车速和方向盘转矩的关系曲线,如图2 所示。

图2 直线型助力特性曲线
2.2.2 模糊自适应PID 控制
传统比例-积分-微分(Proportion Integral Differentia, PID)控制策略由于自身参数是固定不变的,因此,本文采用模糊自适应PID 控制策略的优点来实现我们的控制目标。由助力特性曲线利用插值法得出目标电流,目标电流和电机反馈电流的差值和差值变化率作为系统的输入,输出控制量ΔKp、ΔKi和ΔKd,最后经过PID 控制器得到电压。根据PID 参数的调整规则和EPS 的特点,可以设计输入输出论域和相应的模糊规则。搭建的模糊PID 控制策略结构如图3 所示。

图3 模糊PID 控制策略结构图
3 LKA 主动转向控制
3.1 车辆、车路误差模型
由于车道保持辅助系统主要考虑的是车辆的侧向运动,所以本文对七自由度整车模型进行一定的简化,采用只有侧向及横摆运动二自由度汽车的侧向动力学模型,如图4 所示。
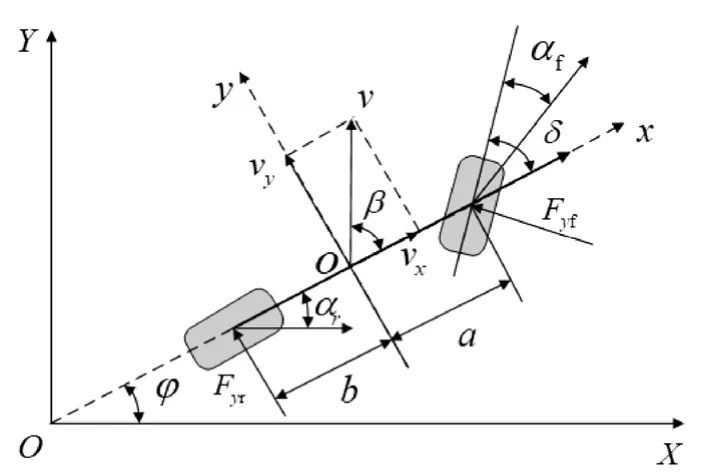
图4 线性二自由度汽车模型
图中,Fyf和Fyr为侧偏力;αf和αr为前后轮侧偏角;δ为前轮转角;vx、vy车辆纵、横向速度;β为质心侧偏角。
对二自由度汽车模型进行受力分析有
因前轮转角δ较小,cosδ≈1,则式(14)可变为
式中,Cαf、Cαr为前后轴侧偏刚度。
前、后轮侧偏角可由式(16)求得
整理得,关于横向速度和横摆角速度的线性二自由度汽车动力学模型矩阵方程为
式中,Iz为车辆转动惯量。
为了描述车辆与道路之间的位置关系,建立了路径跟踪模型,包括横向位置偏差yb和横摆角误差φb。
根据线性二自由度车辆模型及路径跟踪模型,可计算得出车辆相对于道路的横向位置偏差和横摆角误差。
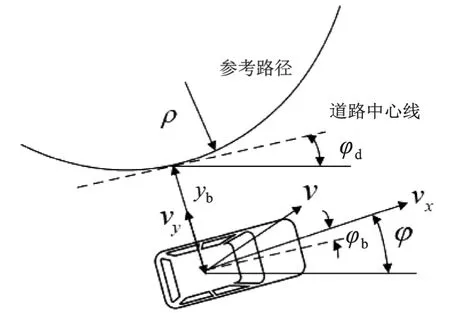
图5 路径跟踪模型
综合式(17)和(18),取系统的状态变量X=[vyωrybφb]T,输入量u=[δ],扰动量为道路的曲率γ=ρ=1/R,则车路模型的状态空间方程为
式中
3.2 最优控制器设计
LKA 系统控制器通过车辆状态信息和道路信息判断车辆与道路之间的相对位置关系,计算出车辆与道路中心线的横向位置偏差和横摆角误差,利用LQR 控制算法计算出当前车辆所需的目标转角,并与EPS 系统的真实转角进行交互,以此来修正车辆前轮转角,保证汽车在车道中心线行驶。
定义最优控制性能指数:
式中,w1、w2、w3、w4和w5为权重系数,可根据控制目标适当调节。vd、ωrdyd和φd为期望值。当vd、yd和φd都为零时,车辆的稳定性和跟踪效果较好。ωrd=vx/R为期望横摆角速度,由道路模型决定。式(20)可改写成二次型函数:
式中,Q为四阶对角矩阵;R=[r]。
根据车路模型的状态方程和最优控制性能指标构造哈密尔顿函数,以求解最优控制量。
式中,P为拉格朗日乘子矢量。对式(22)中的u求解一阶偏导数,寻找u使得H最小。即
由最优控制理论知,P与X呈线性关系,
式中,K、X为系数矩阵,通过建立黎卡提方程求解。
最终求得目标转角
将目标转角与EPS 的实际转角交互得到车辆所需的前轮转角。
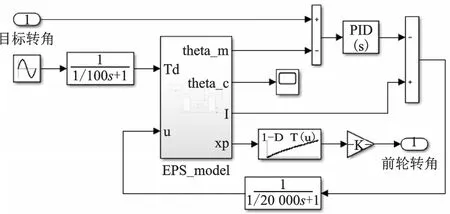
图6 目标转角与实际转角的交互
4 仿真结果分析
4.1 常规助力仿真模型
当车辆处在常规助力模式下,设置车辆几何参数、轮胎参数等,其它设置成系统默认参数。在CarSim 软件中设置前轮转角为输入,输出车速和左右轮回正力矩,搭建仿真模型。输入正弦转向盘操纵力矩其幅值为7 N·m,记录助力开启和关闭时的仿真结果如图7 所示。

图7 开启助力与关闭助力仿真效果
从图7 中可以看出,方向盘转角的值在-85~77 deg 之间变化,当方向盘转角转到最大处77 deg、最小处-85 deg 时,车辆转向系统在有助力控制的状态下,对应的方向盘转矩值最大值为5 N·m,最小值为-5 N·m;而在无助力控制的状态下,对应的方向盘转矩值最大值为14 N·m,最小值为-14 N·m。显然在有助力控制时,方向盘转矩值小于无助力控制情况下的扭矩值,幅值小且变化平缓,有利于操控,可以减轻驾驶员的驾驶疲劳感;且在相同方向盘转角的输入下,无助力控制情况下的扭矩值也总比有助力控制情况下的扭矩值大,说明所设计的EPS 控制策略具有较高的准确性,可以提升车辆的转向轻便性。
4.2 主动转向控制仿真模型
主动转向控制设置为在没有驾驶员参与时,LKA 系统根据车路误差模型利用LQR 控制算法得到目标转角,与EPS 系统交互控制从而带动转向机构主动转向,使车辆保持在车道中心线行驶。在CarSim 中设置车辆纵向、侧向速度,横摆角速度以及期望的路径坐标为输入,前轮转角为输出。
目前LKA 系统主要应用于结构化的道路上,如高速公路和路面条件较好的公路,启动时的车速绝大多数在60 km/h 及以上,本文设置车速为70 km/h 进行仿真验证。从图8(a)中可以看出,设计得基于LQR 的主动转向的控制策略,能够很好地修正前轮转角,使车辆的运动轨迹跟随参考轨迹,跟踪精度高误差较小;从图8(b)—图8(d)中可以看出,在直线道路横向位置偏差、横摆角偏差和转向盘转角均无变化都为零值,有着良好的车道保持效果;随着道路曲率的变化,偏差和转角的值也随之变化以适应道路轨迹的改变,但波动的幅值较小且平缓,在12 s 后恒稳定为零,且横向位置偏差和横摆角偏差会随着实时调整的前轮转角而改变且尽可能地小,从而确保车辆在车道中心线上行驶,提高车辆的横向稳定性,保证行车安全。
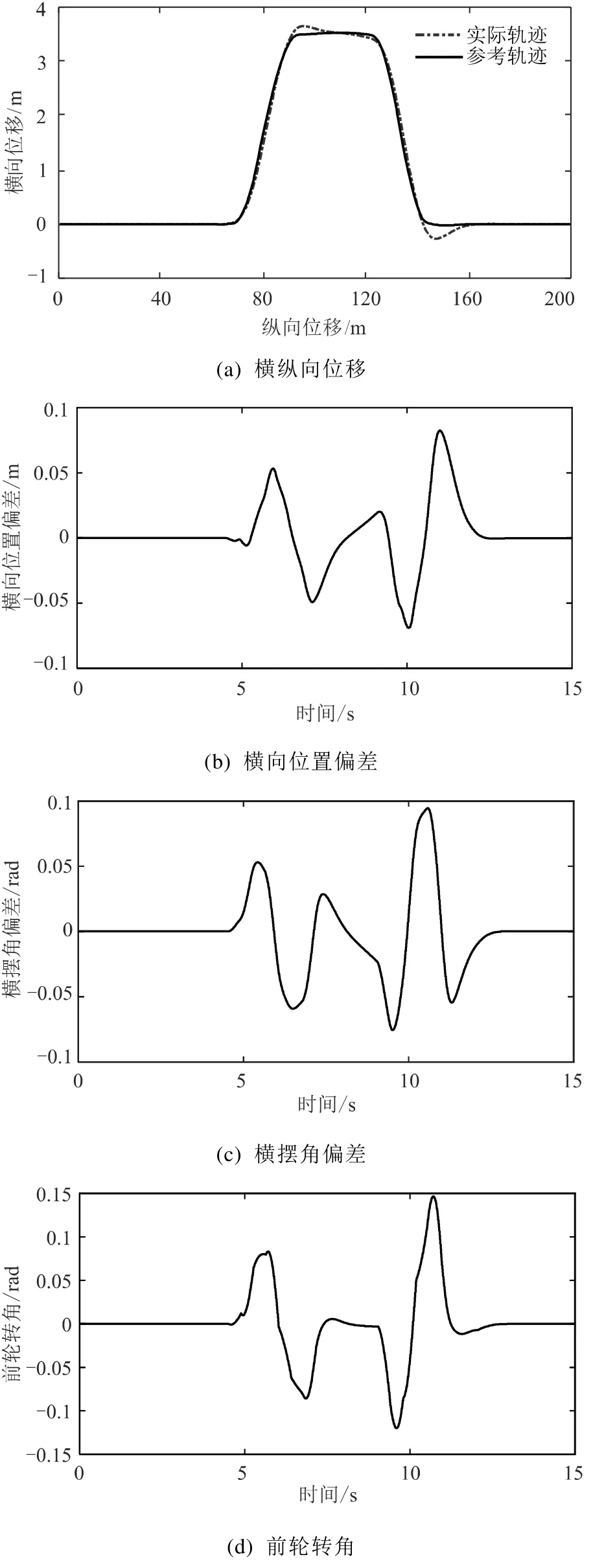
图8 70 km/h 的仿真变化曲线
5 结论
本文根据EPS 在车辆行驶时所扮演的两种不同角色,分析了新能源汽车自动驾驶系统中的常规助力模式和车道保持辅助系统的主动转向功能。通过CarSim 软件构建整车模型,并与MATLAB/Simulink 所搭建的EPS 系统仿真模型实现数据交互,验证模型的正确性。仿真结果表明,提出的常规助力控制系统模型能够很好地控制助力电机的输出扭矩,实现助力的目的提高车辆的转向轻便性。基于LQR 最优控制算法在能够精确地实现新能源汽车车道保持辅助的功能,可极大提高车辆的横向稳定性和安全性。
