基于某纯电动平台的线控系统开发
2023-05-05周罗善
周罗善
上汽大众汽车有限公司,上海 201800
0 引言
电子电器架构是整车厂的核心竞争力。对于一套成熟而稳健的现有架构系统,满足市场需求是其核心驱动力之一,越来越多的智能化功能引入,也推动着架构持续迭代更新,建成功能架构、系统架构、软件架构的全方位架构研发体系是企业需要考虑的问题。
为了让纯电动车型能够更好地服务于智能化产品定位,并积极响应国家政策,推荐相关企业选用新能源纯电动车作为其业务范畴的落地车辆,同时将底盘动力性能优势和品牌优势最大化[1]。为了满足自动驾驶、Robotaxi等业务,迫切需要开展线控系统的开发任务,从系统设计到架构集成,从网关路由到线控控制器[2],实现完全自主开发,既借助大众先进的平台技术,又快速响应本地化开发的要求,在较短开发周期内,完成整套系统的开发与试验[3],为落地到量产车型上完成技术可行性评定。本文所开发的线控控制器满足要求,并提升了线控系统的各项功能。
1 线控系统的开发
本文主要为了集成第三方公司的智能驾驶系统套件并提供线控系统指令集。开发过程严格遵循V模型开发流程。
1.1 需求分析
线控系统需要实现车辆的挡位、纵向和横向的自动控制以及部分车身功能控制,如开启远光灯、警告灯、转向灯、喇叭、雨刮等功能。
线控系统性能技术标准围绕线控转向、线控驱动和线控制动3个方面设计。
1.2 系统架构设计
该线控系统是基于大众纯电动车电子电器架构的升级改造[4],设计方案如下:
(1)挡位控制:驾驶员操作换挡拨杆,之后发送目标挡位请求及换挡杆动作信号到动力域控制器,其实现换挡逻辑处理并发出实际挡位控制信号,从而完成换挡操作。
(2)转向控制:借助原车PLA功能,控制器结合转向动力系统的状态计算转向算法,再发送转向请求报文到转向动力系统,实现转向角度控制。
(3)纵向控制:借助原车ACC功能,开启后以及动力系统状态满足要求后[5],会发送加、减速度控制报文到动力域控制器和ESP等车控单元[6],实现车辆加速和减速控制。
(4)辅助功能控制:驾驶员操作相应开关,借助原车舒适系统控制器发送控制信号,实现远近光灯、雨刮、喇叭、转向灯和警告灯开启控制。
基于以上分析,拟定线控系统的架构集成拓扑方案,其中核心技术是符合实时要求的线控控制器,命名为GPSG,并对整车网络拓扑进行重构:
(1)将转向助力系统进行Bypass处理,实现GPSG直接向其发送转向控制报文;
(2)将动力控制器进行Bypass处理,实现GPSG直接向其发送挡位请求报文及刹车状态等报文;
(3)将转向柱开关(带挡位)控制器进行Bypass处理,实现原车挡位请求报文过滤,并模拟发送灯光、喇叭、雨刮控制相关的CAN报文;
(4)将原车多用途组合开关进行Bypass处理,实现警告灯控制的LIN报文过滤和模拟。
通过线控控制器的线控算法设计和报文转发逻辑,梳理出每路CAN、LIN通道信号,如图1所示。这里定义给第三方通信的CAN通道命名为AI-CAN。最终生成各路信号的DBC和LDF数据文档,作为下一阶段软件开发的输入文件。
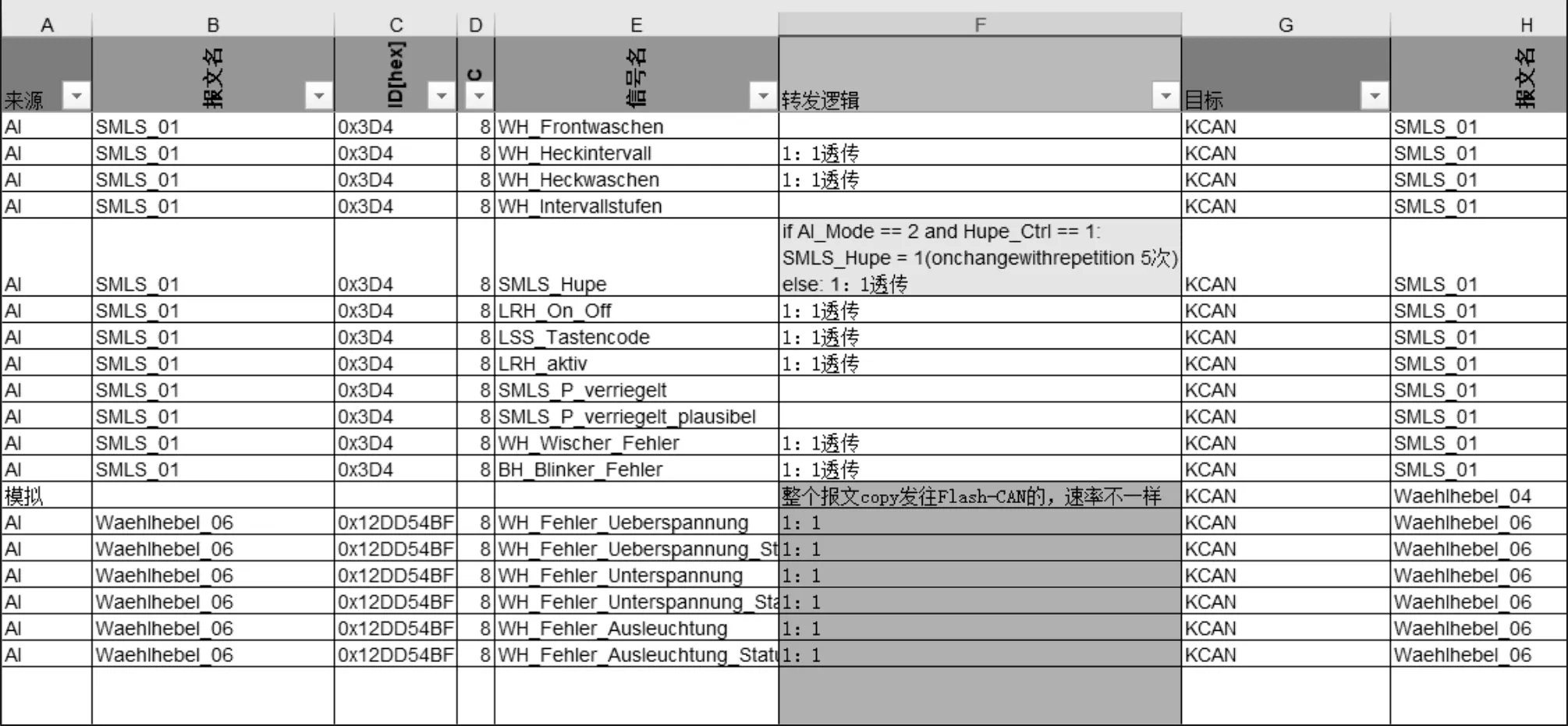
图1 系统信号(局部)梳理
1.3 线控控制器开发
根据前文的架构设计,得出线控控制器硬件架构如图2所示,MCU选择Renesas RH850,支持8路CAN/CANFD通道,4路LIN通道(其中2路预留),2路高低边驱动(用于刹车灯硬线控制)和电源管理模块。为提高硬件可靠性,芯片和接插件均按照车规要求选型。

图2 线控控制器硬件架构
为提高嵌入式软件开发质量,缩短开发周期,软件架构直接采用主流Classic AUTOSAR,本文选用Vector Classic AUTOSAR V4.0(满足ASIL B等级)。线控控制器软件架构如图3所示。基础软件由AUTOSAR BSW配置完成,并设计报文路由;应用层软件包括休眠唤醒、线控转向、线控换挡、线控驱动/制动、车身开关控制、模式切换、警告灯控制。
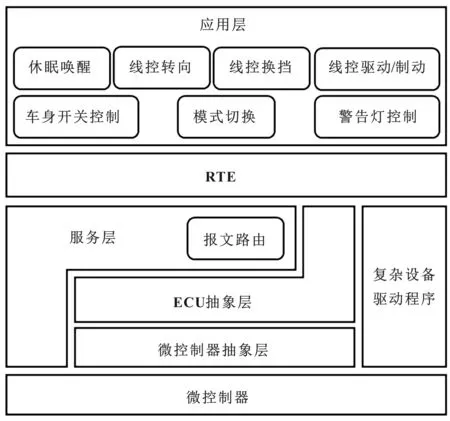
图3 线控控制器软件架构
1.3.1 报文路由功能
报文路由是GPSG控制器的重要功能。考虑到原车转向、动力系统进行了Bypass处理,其处理的报文均须通过GPSG路由,且整车状态信息需要实时路由,如图4所示。
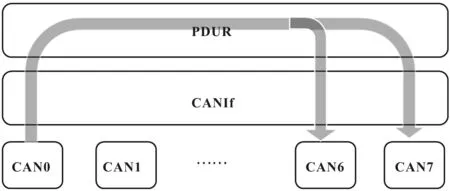
图4 报文路由示意
报文路由功能涉及CAN、CAN If、PDUR模块的配置。CAN模块配置硬件驱动,波特率采样率与接入的整车CAN总线保持一致,设置过滤规则,屏蔽无效报文。CAN If模块管理各路CAN接收和发送的PDU。PDUR模块配置路由规则,PDU Routing Type设置为GATEWAY_ROUTING,实现报文一对一、一对多发送。
1.3.2 线控转向功能
线控转向借助PLA辅助驾驶功能完成对方向盘的控制。该功能模块将期望转角换算成曲率,发送模拟转向控制报文,其流程如图5所示。
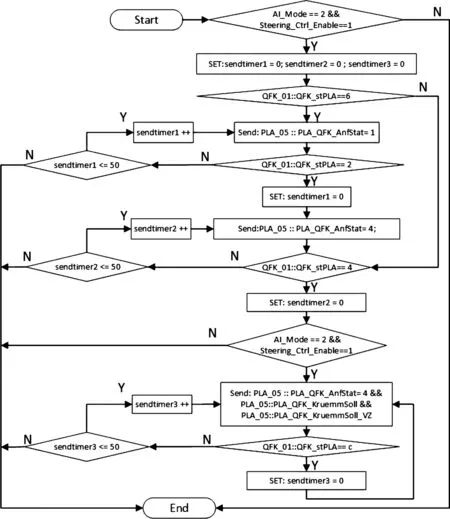
图5 线控转向流程
1.3.3 线控驱动/制动功能
线控驱动/制动借助原车ACC和AEB功能来制定,进入自动驾驶模式时,需开启ACC功能。ACC可实现车辆加减速功能,其流程如图6所示。
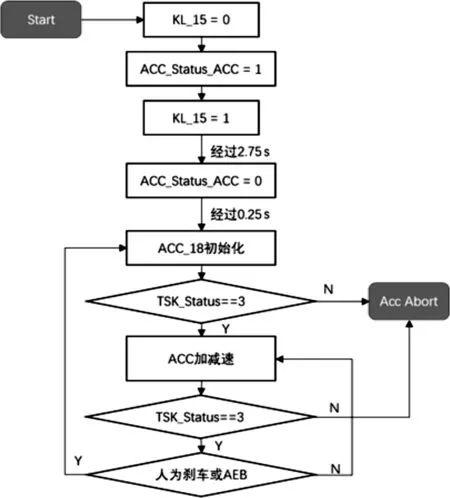
图6 线控驱动/制动流程
当减速度较大时,启动AEB功能,其状态切换如图7所示。

图7 AEB状态切换
1.3.4 线控换挡功能
线控换挡通过模拟报文实现,换挡流程如图8所示。 其中进出P挡条件比较严苛,需要其他信号同步变化。为保证安全,起步阶段不解锁自动切出P挡功能。

图8 线控换挡流程
1.3.5 自动驾驶模式切换功能
当前的系统状态机存在3种模式:Manual(手动驾驶)、AI(自动驾驶)和Safe(安全过渡),模式状态转换条件如图9所示。 Safe模式下自动打开警告灯,提示安全员接管,接管前仍然响应AI指令。
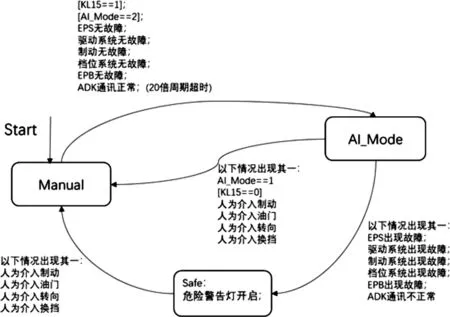
图9 模式状态转换条件
1.3.6 警告灯控制
警告灯控制功能:当接收到AI警告请求时,打开警告灯;AI模式下检测到车辆故障,切换至Safe模式,警告灯自动开启。功能比较单一,但是实现方法与其他模块不同,采用两路LIN(Master/Slave)通道传递报文。
1.3.7 休眠唤醒功能
休眠机制:KL15下电,控制器所有模拟报文停止发送,网关进入报文路由与总线监控状态,当各路总线进入静默状态,控制器延迟500 ms后休眠。
唤醒机制:CAN总线接收到任何报文后控制器唤醒。
1.4 线控系统测试
按照线控控制器功能要求,使用CANoe CAPL来编写测试用例,可对各项线控功能进行单独测试,测试界面如图10所示。

图10 线控功能测试界面
功能区1:模式切换测试。点击Manual切换至手动模式(default),点击AI发出自动模式请求。
功能区2:线控换挡测试。选择目标挡位(PRND),勾选Gear Control Enable,发出换挡请求。PRND按钮会根据反馈信息显示真实挡位。换挡成功后需撤销使能信号。
功能区3:线控转向测试。输入转向角步长,勾选Steer Ctrl Enable,点击“left”或“right”按钮,发出转向请求。界面会根据反馈信息显示真实转向角,由此评判转向角偏差。
功能区4:线控驱动/制动测试。在“Drive”栏输入加速度(正值),勾选Drive Control,车辆进入加速状态,在“Brake”栏输入减速度(负值),勾选Brake Control,车辆进入减速状态。在“AEB”栏输入减速度值,勾选AEB Ctrl Enable,车辆进入紧急刹车状态。
功能区5:车身控制测试。点击不同按钮可对灯光、喇叭、雨刮、警告灯均可独立进行测试。
1.5 整车集成验证
系统集成测试通过一套PAD 驾驶模拟器来完成,用户操作PAD即可实现对整车控制。整车集成验证如图11所示,模拟器通过WiFi与车内线控控制器互联,从而实现远程验证。
2 线控安全机制
线控系统开发项目的核心工作必须围绕安全机制展开,从系统设计到控制器开发,从需求分析到整车验收。为了保证线控网关控制器能够安全可靠地执行功能、错误处理、故障反馈等工作[7],本文对GPSG进行了FMEA分析、梳理安全机制、冗余、故障反馈等方面的考虑,最终在方案设计、软硬件开发和验证方面进行了落实。所采取的具体措施如下:
(1)针对系统方案,采用独立的两路CAN总线进行硬件冗余,保证系统输入和输出信息更加安全可靠。
(2)针对硬件,面向量产要求设计,具备安全相关的时钟监控、电源模块监控、硬件看门狗等安全监控机制。
(3)针对安全相关的信号,为实现End2End的保护机制,采用了CRC-8算法、Counter计数以及报文超时处理机制,能够达到ASIL-B及以上通信安全级别。
(4)针对软件开发模块,基于Classic AUTOSAR框架开发,基础软件满足ASIL B等级,完成应用软件(SWC)进行静态代码扫描(MISRA C规则检测)和单元测试,考虑功能错误处理机制,如功能降级和警告提醒,从AI模式主动切换到手动模式以及故障报警,提示驾驶员接管。
(5)针对测试验证,进行了大量的HIL测试和实车测试,包括CAN报文路由的压力测试。
3 结束语
线控系统将围绕与智能驾驶系统套件、座舱游戏等第三方技术方案的集成和调试,面对各类智能化应用场景的要求和约束进行联合开发与调试,希望在更多的实践开发中优化和提升线控系统的功能和性能,为智能网联技术的发展添砖加瓦。
