无人机测控信息系统安全性分析
2023-04-29何健辉王梓斌魏兴云熊刚
何健辉 王梓斌 魏兴云 熊刚
摘要:随着信息技术和人工智能技术的发展,无人机的应用日益广泛,无人机测控系统是无人机的重要“生命线”,完成对无人机的遥控、遥测、跟踪定位及数据传输等功能。首先介绍了主要无人机平台的发展情况,在介绍无人机测控系统总体技术的基础上,论述了无人机遥控及遥测的通信协议,然后从物理、链路、网络、作战使用等多个层次开展了无人机测控系统的安全性分析。最后分别从标准制定、无人机自主决策、空中交通管制、信道抗干扰等五个方面提出了对无人机测控系统的发展建议。
关键词:无人机测控;遥控;遥测;安全性
一、前言
无人机(Unmanned Aerial Vehicle,UAV)已成为当今广泛使用的高新技术武器之一,在局部战争中频繁使用。目前世界上从事研究和生产无人机的有美国、俄罗斯、以色列、英国等近30个国家,无人机的型号已经增加到200种以上,预计全球有3万架以上的无人机。
无人机系统主要由飞机平台、任务载荷和测控系统三大部分组成,而无人机测控则是无人机系统最重要的组成部分。无人机测控是指对无人机进行遥控、遥测、跟踪定位和数据传输。遥控是指对无人机飞行状态和设备状态进行控制;遥测是指对无人机飞行状态和设备状态参数的测量与回传;跟踪定位是指对无人机进行实时跟踪与位置测量;数据传输是指对无人机载任务载荷及传感器信息的传输。无人机测控系统采用的无线网络通信技术和应用协议包括一套通信协议以及被交换信息的定义[1-2]。
二、无人机测控信息系统特征分析
(一)主要无人机平台
美国无人机的主要供应商为诺斯罗普·格鲁门公司、通用原子公司、洛克希德·马丁公司、波音公司等。根据美国《无人机系统路线图2013-2038》的数据,美国还装备了“全球鹰”“捕食者”“大乌鸦”等不同类型数量众多的无人机。
以色列在无人机方面水平与美国相当,研制公司主要有飞机工业公司马拉特(MALAT)和埃尔比特(Elbit)公司,典型产品有“哈比”“苍鹭”“赫尔墨斯”等。
我国研制无人机已有50多年的历史,主要产品包括“翔龙”“翼龙”“利剑”“天翅”“WJ-600”等[3-4]。
(二)无人机测控技术体制分析
无人机测控系统主要完成对无人机平台的遥控、遥测、跟踪定位及传感器信息传输。目前,针对无人机测控系统的主要规范包括信道通用要求、端机通用要求、信息传输链路协议、遥控遥测等,工作频段有UHF、X、Ku等多个频段。下行链路传输速率符合3.2×2Nkb/s和256×2Nkb/s,其中N为0—6的整数,采用了BPSK、QPSK、FSK、CPFSK等多种调制方式,可实现高速率的点对点数据传输及组网分发传输功能。上行链路传输速率符合3.2×2Nkb/s,其中N为0—6的整数,采用了扩频、跳频或扩跳结合体制等抗干扰传输体制。中高空长航时无人机还配置了卫星中继测控链路,选用Ku或Ka波段为主信道。在指挥控制技术方面,对无人机的操纵控制已从早期的飞行员实时操纵驾驶飞机向无人机自动飞行控制,甚至自主决策控制方向发展。
无人机测控系统采用“X合一”技术体制,常用的有“三合一”和“四合一”体制[5]。“三合一”信道体制是指遥控、遥测和跟踪定位统一的载波体制,即利用遥控和遥测实现测距,利用遥测信号实现跟踪测角,而利用另外单独的下行传输任务载荷信息。“四合一”信道体制是指遥控、遥测、跟踪定位和任务载荷信息传输的统一载波体制,即任务载荷信息与遥测共用信道传输,利用遥控和遥控实现测距,利用任务载荷与遥测信号实现跟踪测角。
(三)无人机测控通信协议分析
1.遥控
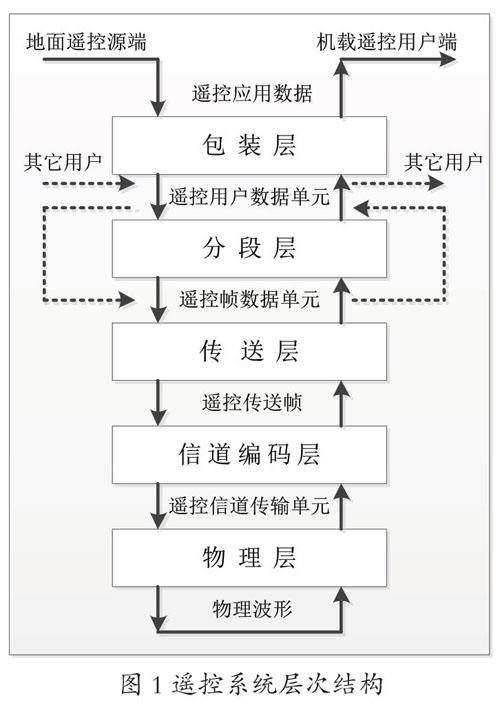
无人机遥控信息的处理分为多个层次,从源控制端发出的遥控数据经过5个层次的处理送往无人机相应的遥控信号接收机,如图1所示。
遥控应用数据在包装层加上包头后,形成遥控包。遥控包是遥控用户数据单元的一种主要形式。遥控包在分段层被分段或被集装后,加上段头形成遥控段。遥控段是遥控帧数据单元的一种主要形式。遥控用户数据单元和遥控帧数据单元还可以是外来的由用户自定义的数据单元。在传送层,遥控帧数据单元放入遥控传送帧的数据域,在它的前面有帧头,后面可选择差错控制码作帧尾。一个传送帧被分组编码为一系列有固定长度的短码组,这些分组码有纠检错能力。把分组码序列再包装成一个遥控信道传输单元,每个单元可以包含一个或多个传送帧。最后把这些遥控信道传输单元调制到物理信道上,往无人机遥控信号接收机发送,在无人机上完成上述过程的逆过程。
2.遥测
遥测数据流用于表示在遥测系统中,遥测数据从无人机数据源点传送到控制中心的数据终点所经历的全部过程。源包中包含了待传送到地面的无人机上应用数据块和为地面捕获、存储、分配这些遥测数据所需的基本信息。源包依次由主导头和数据域二部分组成,其最小长度为7字节,最大长度为65542字节。传送帧规定的数据结构用于传送源包、空闲数据和自定义的数据。自定义的数据可以是专门的高速率数据或其它不符合源包结构的数据。传送帧由帧主导头、帧副导头、帧数据域、操作控制域和帧差错控制域组成。在一特定任务阶段,传送帧的长度应固定不变,帧的最大长度为16384比特。
三、无人机测控系统安全性分析
(一)物理层安全性分析
无人机测控系统上行遥控信道在物理层提供由地面控制站到无人机的射频信道及其相应的操作,以支持遥控数据的传输。物理层数据是由捕获序列、遥控信道传输单元和空闲序列组成[5-6]。
捕获序列是一个“1”和“0”交替的序列,起始可以是“1”,也可以是“0”。它的长度至少是16个字节,其作用是获取初始比特同步。在连续传送n1和n2个遥控信道传输单元之间可以用空闲序列连接,空闲序列是当遥控信道传输单元不存在时,用来维持比特同步的,它也是“1”和“0”交替的序列,长度不限。
无人机测控系统上行链路采用具有抗干扰能力的扩频、跳频或扩跳结合体制,数字调制方式以PSK为主,编码主要包括卷积编码、交织和RS编码。下行链路采用抗多径、抗衰弱、频带利用率较好、适应地空低仰角信道和高速数据传输的调制体制。
基于对无人机测控系统物理层数据结构及信道传输特征进行分析,得到其在物理层存在如下安全性问题:(1)下行链路主要用于遥测及数据回传,该链路未采用扩频、跳频等抗干扰通信方式,抗干扰能力较弱;(2)上行链路物理层数据结构中捕获序列位置及长度固定,易受到瞄准式扰乱,使得遥控信息解析失败,遥控功能丧失。
(二)链路层安全性分析
传送层是无人机遥控的核心层,它提供了可靠传送遥控数据所需要的最重要的操作。传送帧的标准数据格式包含主导头、帧数据域和可选的帧的差错控制码三部分。在信道编码层为了降低物理信道上噪声对所传输的遥控数据的影响,采用分组码进行差错控制。分组码与遥控数据的同步关系由遥控信道传输单元的标准结构来保证。在接收端,对码元“1”和“0”的模糊度可以通过物理层选择调制体制来解决,也可以通过辨识遥控信道传输单元起始序列来解决。把传送帧按分组码要求进行分组和编码后,形成一系列码块,每m个码块串接起来,再加上起始序列和结尾序列的包装,构成遥控信息传输单元。起始序列(16bit)用于同步用,结尾序列是一个不符合信道编码规则的序列,用以停止接收译码器的工作。
遥测信息传送帧的帧主导头由帧版本号、帧识别、主信道帧计数、虚拟信道帧计数和帧数据域状态五个域组成。其主要功能是:识别出数据单元是否为传送帧;识别出发送遥测数据的无人机;将多路虚拟信道组成一路主信道;对主信道和虚拟信道进行计数;提供指针和其它信息用来从传送帧数据域中提取可变长度的源包。
基于以上对无人机测控系统遥控及遥测信道的传送层和信道编码层进行分析,得到其在链路层存在如下安全性问题:(1)遥控信道在编码层之后的遥控信息传输单元存在长度和位置固定的起始序列和结尾序列,其中起始序列用于比特同步,在信号解调的基础上该字段易受扰乱,使得比特同步失败;(2)遥测信道的传送帧在完成信道编码之后形成了格式固定的码块结构,且编码码块的识别是基于同步标识位完成的,因此对信息的译码首先取决于对同步标识位的准确识别,在同步标识为被扰乱的情况下难以进行正常的遥测信息的译码。
(三) 网络层安全性分析
多类型无人机的最优组网,需要具备快速为各无人机平台分配任务、手动控制无人机及其载荷和在不同指挥级别快速分发结果信息的能力,这就要求部署的无人机系统是可以互操作的。
目前的无人机系统大多是“烟囱式”系统,它们使用专用测控系统、通信协议和消息格式来完成与其它无人机以及外部通信系统之间的通信,从而导致传感器数据分发大多是通过间接方式,也就是从无人机到应用系统再到目的端的流程。同样地,来自外部通信系统的无人机系统任务分配也要通过间接方式实现。
基于以上对现有无人机互操作网络结构进行分析,得到其在网络存在如下安全性问题:(1)无人机测控系统在网络层缺乏统一的通信协议、消息格式等标准,使得各种无人机之间缺乏协同作战的实时性能力,也会给协同作战带来安全隐患;(2)现有的无人机测控系统互操作能力过渡的依赖地面通信系统节点的支撑,从而使得在通信系统节点一旦出现故障或被破坏,则无人机测控系统的互操作性将丧失。
(四)使用方式安全性分析
1.测控系统地面操作
在测控站地面操作方面,目前存在以下两点安全性隐患:(1)地面指挥站针对不同的无人机采用相同或相似的操作方式,使得针对不同类型无人机的遥控无法做到最优化,使得无人机地面遥控存在安全隐患;(2)无人机操作员培训过程中,缺乏对情景意识、自身安全担忧、所欲湍流身体感受、严重程度评估等训练,使得在战时无人机遥控操作存在很大的安全隐患。
2.卫星测控链路
当无人机执行超视距长航作战任务时,测控系统需要采用中继的方式完成遥控遥测,其中常用的中继方式为卫星中继,国内卫星中继测控一般选用Ku或Ka波段为主信道[6]。结合卫星中继一般选用地球同步卫星的特点,分析无人机测控系统卫星链路存在如下安全性隐患:(1)中继卫星采用军事卫星或租用商用卫星进行无人机遥控遥测,其波束覆盖范围很广,可以轻易在我国领土范围外接受到无人机的遥控遥测信号;且卫星中继转发采用透明转发的方式,使得无人机遥控遥测信号易被解析;(2)同样无人机测控链路容易在卫星的波束范围内受到有意和无意的干扰;(3)一旦用于无人机测控中继转发的卫星转发器受到阻塞干扰,则无人机将失去遥控遥测功能,存在失控的危险。
四、结语
本文在介绍无人机测控系统总体技术的基础上,研究无人机测控系统技术体制、遥控和遥测通信协议,探索无人机测控信息系统的特征,并且分别从物理、链路、网络、使用方式等多个层次开展了无人机测控系统安全性的具体分析。
下面从标准制定、无人机自主决策、信道抗干扰等三个方面提出对我国无人机测控系统的发展建议。
(1)健全无人机测控系统标准制订
针对无人机测控系统在互操作网络层次方面存在的安全性问题,建议重点针对无人机未来的发展战略,充分利用国外标准的有利资源,结合国内型号研制的需求,研究和搭建我国无人机测控系统标准体系框架,制修订急需的无人机互操作标准,以满足无人机各型号研制与互联互通的需求。。
(2)推进无人机自主决策化
由于无人机测控系统的安全性问题,特别是在超视距作战时的安全性问题突出,因此建议着力推进无人机自主决策、航迹规划、自主巡航等技术的研究与应用,提高无人机在战时及远程战略侦察时的存活率。
(3)提升信道抗干扰措施
建议采用智能天线自适应技术,提升目前测控系统卫星中继链路的抗干扰能力了;建议对无人机测控系统返向数传链路采用数据加密或扩频等技术手段,防止返现数传信息被敌方侦测;建议采用测控链路冗余手段,特别是在卫星中继测控情况下,以防止由于测控链路失效造成无人机失控。H
参考文献
[1] 周祥生. 无人机测控与信息传输技术发展综述[J]. 无线电工程,2008,38(1):30-33.
[2] 周伟,宋军,成旭. 无人机在海事监管救助中的应用与选型[J]. 水运管理,2012,6(4):20-22.
[3] 黄国志.中国“ 翔龙” 长航时高空无人机[J].现代兵器,2006,10(12):36-38.
[4] 张学峰.“翼龙”无人机[J]. 世界军事,2012,3(24):50-52.
[5] 韩玉辉.无人机测控与信息传输有关系统问题探讨[J].无线电工程,2008,2(8):4-6.
[6] 杜浩,韩超.无人机指控平台信息接入系统的发展研究[J].航空电子技术,2020,51(3):13-17.
