高级辅助驾驶系统主动安全性评价方法
2023-04-29王银亭吴长水
王银亭 吴长水


关键词:主动安全;高级辅助驾驶;评价方法;裕度与不确定度(QMU)
在国家行动纲领《中国制造2025》的引领下,智慧城市是未来发展的重点领域,具备高级辅助驾驶的汽车是智慧城市中的重要角色,为保证城市交通安全,汽车在进入市场前要经过严格的测试与评价[1-2]。当前,全球对于高级辅助驾驶系统的评价还未形成统一的标准体系。J.B.Kim等提出了基于摄像头(单目或双目)的测试评价方法,此外还提出了综合场景以及场景连续生成的方法[3]。D.T.Son等提出了基于仿真的高级驾驶辅助系统与自动驾驶技术开发的测试评价与验证框架,其中评估辅助驾驶系统的性能指标可以根据不同的测试工况进行调整[4]。H.Braun等提出了在仿真模型的基础之上对车辆进行安全分析与评价的新概念,通过量化不同评价指标之间的联系,积分临界测量冲突风险与碰撞风险,模糊与缺失知识的处理来提高临界评估的质量,基于最大熵原理生成一个完整的安全驾驶模型,通过分析车辆运动数据探寻出驾驶情况的临界性,进而确定车辆的安全性[5]。
国内研究人员将评价方法分为定性评价方法与定量评价方法。定性评价普遍采用专家经验法,聚集相关领域的专家,通过自身的知识经验积累和观察评价目标的表现与状态,归纳总结出非量化的评价结果。定量评价是结合数学方法,采集和处理测试数据,最后以精准的数值体现评价对象全部信息的方法,包括独立指标评价和联合指标评价[6]。朱冰[7-8]等提出了基于自然驾驶数据对具有高级辅助驾驶系统的汽车安全性进行评价的方法,通过分析车辆的自然驾驶数据提出高级辅助驾驶系统的安全性评价指标—场景风险系数,以此实现逻辑场景层面的辅助驾驶系统安全性的定量评价。魏子茹[9]等使用层次分析法和基于层次相关性的客观赋权法来确定评价指标的权重,并且将灰色关联理论评价方法与模糊综合评价方法结合,以此实现高级辅助驾驶系统车辆综合性的定量评价,减少了主观意识的参与,提高了评价结果的客观性。李茹[10]等提出了一种熵值法与序关系分析法相结合来确定测试评价指标权重的方法,同时使用模糊评价方法对辅助驾驶车辆进行综合性的定量评价,解决了评价过程计算量大、复杂度高、普遍适用性低等问题。
上述研究的评价方法大都是从单个高级辅助驾驶系统的角度出发,缺乏对高级辅助驾驶系统种类多样化的总体考虑,以及多个系统单个评价指标之间的横向对比。为解决上述问题,本文将裕度与不确定性量化(quantificationofmarginsanduncertainties,QMU)的评估方法引用至高级辅助驾驶系统主动安全性的评价体系中,总结得出适用于高级辅助驾驶系统主动安全性的评价方法,并采用序关系分析法(G1)确定评价指标的权重系数,利用模糊综合评价方法对单指标评价结果进行综合,从而得到客观、量化的综合性评价结果。
1基于QMU的高级辅助驾驶系统主动安全性评价方法
裕度与不确定性量化(QMU)是一种将不确定性考虑在内并通过裕度与性能通道阈值为关键要素的风险评估方法,主要对系统工作之前的可靠性进行评估,具备多源信息融合的能力,适用于数据不足、知识缺乏情况下的高风险复杂系统的可靠性评估[11]。其评估流程分为3个部分:首先通过建立系统的失效模型获得失效指标,组成观测清单;其次使用模型预测,实验数据,以及专家判断建立性能通道;最后进行不确定性源分析并对其进行量化得到置信因子。QMU的基本定义是一个广义概念,具体操作流程由所评估的具体系统性能决定[12-13]。
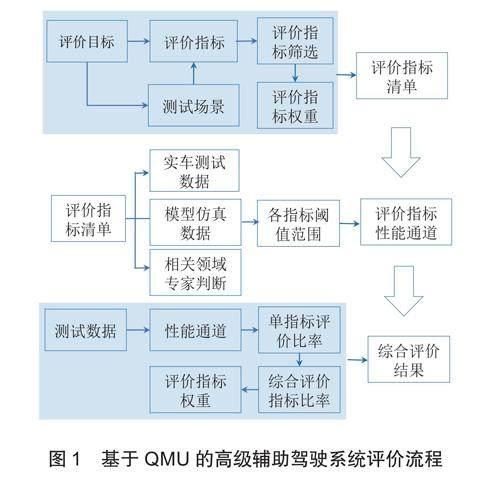
本文在结合QMU基本工作原理后,提出了高级辅助驾驶系统主动安全性评价方法,其评估框架包括:结合具体测试用例建立评价指标观测清单;获取各个评价指标性能通道的阈值;计算各个指标的评价比率;综合各个指标的评价比率对高级辅助驾驶系统的主动安全性进行评估。具体评价流程如图1所示。
1.1评价指标观测清单
评价指标观测清单的正确建立保证了评价结果的准确性,需考虑多方面因素后对评价指标进行选取,再利用序关系分析法确定各个指标的权重,最终得到测试评价的指标清单。评价指标观测清单建立流程如图1所示:
1)选取评价指标
根据测试需求提取出测试评价目标以及满足测试需求的测试场景,由相关领域专家充分分析评价目标与测试场景,再结合新车碰撞测试(newcarassessmentprogram,NCAP)法规制定评价指标清单。具体的评价指标清单则根据具体的测试需求与评价目标进行改变。
2)确定指标权重
根据相关领域专家对指标体系的主观经验与建议[14]将评价指标依据重要性进行排序,即
1.2评价指标性能通道
建立性能通道的方法一般分为3种,即基于实车测试数据的方法、基于模型预测的方法、基于专家判断的方法[15]。模型预测方法需对模型进行验证与确认,增加了计算的复杂度,并不适合工程应用。基于专家判断的方法增加了企业评价成本,基于实车测试数据的方法具有高真实性的特点且测试数据可循环利用,故本文选择基于实车测试数据的方法来建立评价指标的性能通道。
性能通道是以10台不同类型搭载不同驾驶辅助系统的真实车辆的测试数据为基础进行构建,相同类型车辆同一指標构建出一个性能通道即该指标的阈值;同一评价指标,不同类型的测试车辆所搭建的性能通道不同;同类型的车辆,不同指标所搭建的性能通道不同。某指标的阈值范围可代表多个高级辅助驾驶系统某一性能水平的上下限。不同驾驶辅助系统的相同指标在同一阈值内进行比较,开发者便可直接看出系统之间是否存在差距以及存在差距的评价指标及性能。
1.2.1测试设备及数据采集平台搭建。
测试设备及数据采集平台主要由全球目标车辆(globalvehicletarget,GVT)与测试车辆(vehicleundertest,VUT)2部分组成,如图2所示。全球目标车辆的滑板底盘配有RTKGNSS模块,VUT配有驾驶机器人和RT3005GG高精度惯性导航系统。其中驾驶机器人可记录方向盘转角、测试车行驶路径等信息,RT3005GG惯性器件可记录车辆的位置、速度、加速度、航向角、俯仰角以及横滚角等信息,最后将记录的数据汇总至上位机,便于测试人员对设备运行状态的实时监控以及测试数据的保存下载。
参考国内真实道路驾驶场景以及中国新车评价规程(China-newcarassessmentprogram,C-NCAP)、欧洲新车安全评鉴协会(Europeannewcarassessmentprogrammer,E-NCAP)管理规则提取出适用于国内道路的典型逻辑场景[16],并利用封闭场地设备以及实车数据采集平台对典型逻辑场景进行复现。
将逻辑场景中的连续参数离散化生成具体的测试场景用例,再利用测试设备及数据采集平台对同类型搭载着不同高级辅助驾驶系统的汽车进行遍历测试。在测试数据采集过程中,目标车按照设定的路径行驶,测试车则由监控员控制驾驶机器人行驶或者按照个人驾驶习惯行驶。
为保证测试数据的有效性,每个测试用例至少测试2次,若2次测试数据值均在允许的误差范围内,则取这2次数据值的平均值;若2次测试数据值相差较大则进行第3次与第4次测试,若第3次、第4次的测试结果与第1次或者第2次的测试结果在允许的误差范围内则取其3次测试结果平均值。以此类推,取多次相近的测试数据值进行平均值计算,作为该测试用例的最终结果。
1.2.2指标数据分析。
通过测试数据采集平台所测得的数据对其进行统计学分析同一评价指标在不同种类的辅助驾驶系统测试下会得到不同的数值,将各个评价指标的数据进行分类作为统计学分析的数据样本。通过求取样本数据的平均值、方差以及标准差来剔除样本中的异常值[17],从而得到样本数据的阈值,即性能通道上下限的数值。
1.3模糊综合评价指标比率
以QMU的计算原理为基础,将测试车评价指标的测试数据中位值与其性能通道下限值的差值作为裕度(M),则
其中:Smax、Smin分别为某辆搭载辅助驾驶系统车辆观测参数测试的上限值、下限值,Ymin为性能通道的下限值。
其评价指标数据波动区间的半宽度作为不确定度(U),则
指标评价比率CF与常量1组成高级辅助驾驶系统的评价依据。若CF<1,则代表该评价指标波动范围漂移至性能通道阈值下限以外,此结果表明:该项指标需重点关注并且该指标在具备辅助驾驶系统车辆上所反应的单项功能尚不完善,有待进一步调整;相反若CF>1则代表该项指标处于正常的阈值范围之内,该指标在具备辅助驾驶系统车辆上所能体现的单项功能可通过。
搭载不同高级辅助驾驶系统的同类型车辆,相同的单指标之间也可进行对比。不同的高级辅助驾驶系统的单指标所代入的指标阈值相同,故其比值可表示性能强弱。例如:A、B两车的相同指标所得到的单指标比率分别为CFA与CFB,若CFA的比率大于CFB的比率,则反映出A车系统在该指标上的性能强于B车系统,反之,则B车系统的性能强于A车系统,由此可对多个高级辅助驾驶系统的单指标性能进行横向对比。
基于QMU计算原理,结合NCAP法规评分规则,假设每个指标都处于理想的最佳状态,按照上述综合比率计算方法可得出综合比率结果为T=6,同理假设每个指标比率不通过,则综合比率结果无限接近于零。参考Euro-NCAP评分体系将其平均分为5档:0~1.2为基本达标,1.2~2.4为及格,2.4~3.6为良好,3.6~4.8为较优,4.8~6.0为最优。
2高级辅助驾驶系统主动安全性评价方法验证
评价高级辅助驾驶系统主动安全性所需的测试评价内容包括自动紧急制动(autonomousemergencybraking,AEB)功能、前向碰撞预警(forwardcollisionwarning,FCW)功能、车道保持辅助(lanekeepingassist,LKA)功能、车道偏离预警(lanedeparturewarning,LDW)功能,如表2所示,其中,测试项目包括前车静止(cartocarstationary,CCRs)、前车慢行(cartocarmoving,CCRm)、前车制动(cartocarbraking,CCRb)、车辆碰撞近端行人(car-to-pedestriannearsideadult,CPNA)、车辆碰撞远端行人(car-to-pedestrianfarsideadult,CPFA)。
以上测试项目都需使用基于场景的测试方法[18]以及封闭场地测试设备对搭载辅助驾驶系统的车辆进行测试。根据NCAP法规,自动紧急制动(AEB)是高级辅助驾驶系统中一项经典的主动安全功能,CCRm(用以测试车辆最高速度)以及CPFA(用以测试车辆最高速度)可涵盖到AEB的全部测试工况点,故本文以CCRm、CPFA为例对此方法进行计算验证,具体测试用例参数如表3所示,该车辆部分参数如表4所示。
2.1评价指标观测清单
中国新车评价规程(C-NCAP)与欧洲新车测试评价标准(E-NCAP)在ADAS主动安全性方面是行业内最认可的评价规则。本次测试在选取评价指标时,充分参考以上2部法规中对测试评价指标的描述规定、中国真实的道路特点以及专家实际的测试评价经验。
基于上述高级辅助驾驶系统主动安全性评价方法中评价指标观测清单的建立流程,本次评价实例中评价指标包括:测试车车速(vVUT);测试车纵向加速度(aVUT);目标物与测试车的最短相对距离(DVUT-GVT);测试车的横摆角速度(ωVUT)。结合AEB领域专家建议[19-20]与具体测试用例,该测试评价指标的重要性为利用理性赋值法[21]对其重要性之比赋值为:
将上式代入式(3)与式(4)计算得到各个评价指标权重,如表5所示。
2.2评价结果
将其测试数据代入式(5)—式(9)中,得到的评价指标参数数据结果如表6所示。单指标评价比率分别为3.6601、2.6704、1.7678、1.8192,将单指标的评价比率以及权重代入式(10)中,得到测试场景下的综合评价结果为T=2.702。根据本文所制定的评分规则可总结出该辅助驾驶系统的AEB功能综合表现良好。
3结论
本文将基于结合裕量与不确定度(QMU)的评估原理与高级辅助驾驶系统的主动安全性评价相结合,得出基于QMU的高级辅助驾驶系统主动安全性的评价体系以及評价流程。文中详细描述了在高级辅助驾驶系统主动安全性的评价体系中,建立评价指标观测清单,创建评价指标性能通道和计算综合评价比率的方法。该方法量化了辅助驾驶系统主动安全性的纵向评价结果,测试车车速、加速度、与目标车的距离、方向盘转角速度的评价结果分别为3.6601、2.6704、1.7678、1.8192,综合结果为2.702。对于同类型搭载不同高级辅助驾驶系统的汽车,利用单指标的评价比率可对其单项功能进行横向对比,依据综合指标评价比率可对其整体能力进行横向对比,有利于开发者了解多种高级辅助驾驶系统之间的差距,弥补自身开发的不足。
本文在基于QMU高级辅助驾驶系统主动安全性评估方法中,利用序关系分析法来确定评价指标的权重矩阵,使用模糊综合评价方法得到评价矩阵,再将二者相结合得到最终的综合评价结果,减少了评价流程中主观意识的参与度,使评价结果更具有参考性,并提高了整个评价体系的客观性。
本文采用基于场景测试的方法,利用封闭测试场地的设备复现前车慢行(CCRm)和成人(Ped)的逻辑测试场景,验证了该评价方法的可行性与有效性,为自动驾驶汽车后续的综合性能评价提供理论依据以及数据支撑,从而促进整个自动驾驶汽车行业技术的快速发展。
