浅水观察小型ROV结构设计与优化
2023-04-27张贺贺张宝雷孙冰
张贺贺,张宝雷,孙冰
(中海油能源发展股份有限公司采油服务分公司,天津 300452)
近年来水下机器人的应用相当广泛,如:海洋资源开发、海底打捞、水上养殖,以及江河湖泊大坝的检修等[1]。因为水下机器人的工作效率高,且更具安全性,所以水下机器人取代人工进行水下作业越来越普遍。但是大部分水下机器人都是应用于深海军事领域,进行石油开采、水雷探测、沉船打捞等水下作业任务,具有体积庞大、价格昂贵等特点,无法适用于江河、湖泊等浅水域。小型水下机器人代替人工在浅水域进行作业,不仅可保障水下作业人员的生命安全,还可提高工作效率[2],因此,考虑在现有研究的基础上,设计一款外形小巧美观、航行阻力低、机动性能好、便于携带的小型ROV,以期通过搭载相应的传感器,便能够完成水质检测、地质勘测、水下摄影与搜索、水面监视与巡航等浅水作业任务。
1 小型ROV设计方案
1.1 总体设计方案
总体设计方案见图1,包括整体外形设计、密封耐压舱结构设计及推进器布局设计、电控系统的选型。主要技术要求见表1。
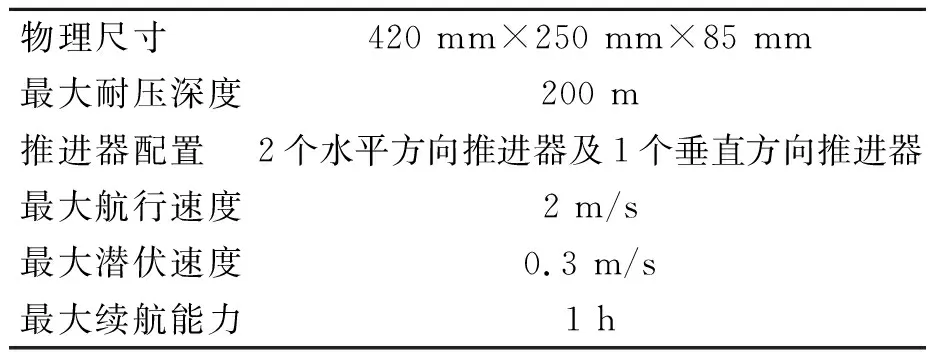
表1 相关技术指标
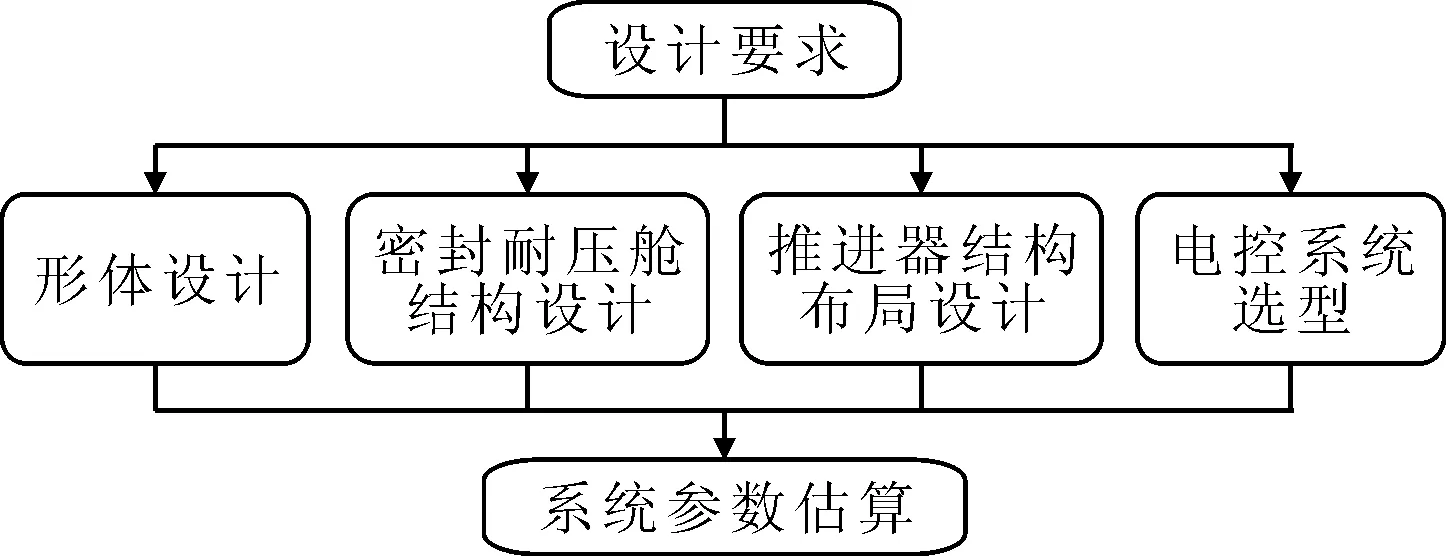
图1 小型水下机器人设计方案
1.2 整体外形设计及水动力分析
1.2.1 整体外形设计
水下机器人的外形设计应考虑尽可能减小阻力,提高航行速度和整体续航能力[3-4]。所设计的浅水观察水下机器人整体外形为扁平流线型,并在两侧设计挡板,既能减小航行阻力,又能保证航行时的平稳性。外框架采用含玻纤加强PP侧板及底部铝梁一体式框架设计,该材料具有密度小、吸水率低、强度韧性好的特点。底部铝梁采用6061-T6铝合金,采用梁设计具有刚性好,阻水面小的优点,同时对铝梁进行硬质阳极氧化处理,增大框架的耐腐蚀性。见图2。
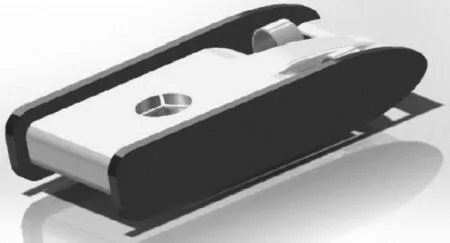
图2 小型水下机器人外形设计
1.2.2 根据Fluent水动力分析进行结构优化
水下的环境导致水下机器人运动有较强的非线性和耦合性特点。水流沿着水下机器人的表面移动,并伴随着涡的产生和脱落,不断地有能量随之耗散。准确得出流体对水下机器人的作用力对于自身的功耗、姿态控制以及推进器的选型至关重要。当水下机器人在水下运动时,流体的作用力与自身的运动速度呈非线性关系,通常情况下不能直接数值求解。而模型试验的方法在前期设计阶段需要耗费大量的资金、时间及人力成本,且对试验条件也有很高的要求。因此,对于水下机器人进行精确的流体运动仿真分析具有重要的意义。
采用Fluent软件分析所设计的小型水下机器人在水下航行时,小型水下机器人所受到压力及速度。小型机器人在水下以1 m/s航行时受到的压力见图3,航行时的速度变化见图4。

图4 小型水下机器人1 m/s的速度矢量图
不同航行速度下水下机器人的航行阻力见表2。

表2 不同航行速度下水下机器人的航行阻力
由表2可以看出,随着速度的增加,航行阻力成指数增长,因此考虑对水下机器人的结构进行优化,减小其所受到的阻力,提高续航能力。优化后的水下机器人结构模型见图5。

图5 优化后水下机器人三维模型
将水下机器人的进水口进行镂空,不仅可减小了质量,还可保证进水量,提高推进器的推进效率。
由图6可知,优化后的结构进一步降低了航行时水下机器人所受到的阻力,保证了续航能力。
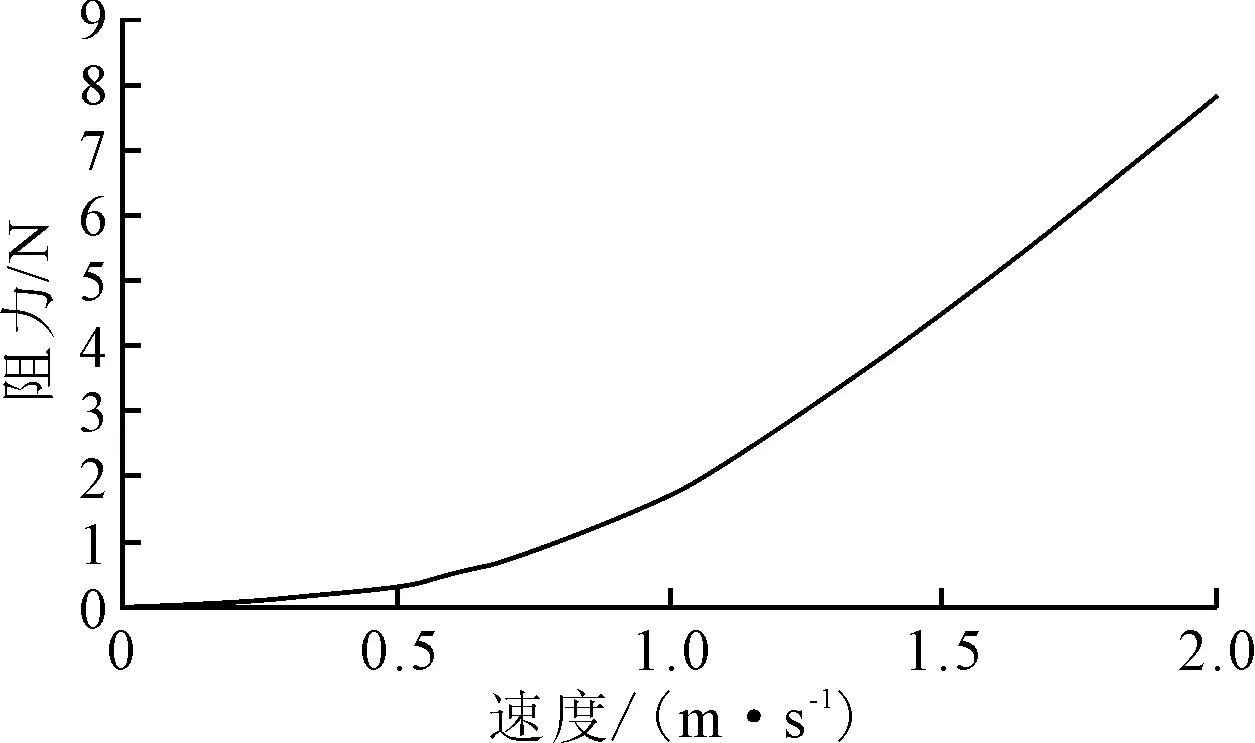
图6 优化后水下机器人航行速度与航行阻力的关系
1.2.3 小型ROV密封耐压舱结构设计
小型水下机器人密封耐压舱的内部布局图见图7,材料选用亚克力材料,其具有良好的机械性能及耐压强度,且密度较小,质量轻,同时又能保证较强的耐腐蚀性能。

图7 小型水下机器人密封耐压舱的内部布局
采用Fluent对不同深度下(150 m、200 m)密封舱受到的应力及位移进行了仿真,具体见图8。
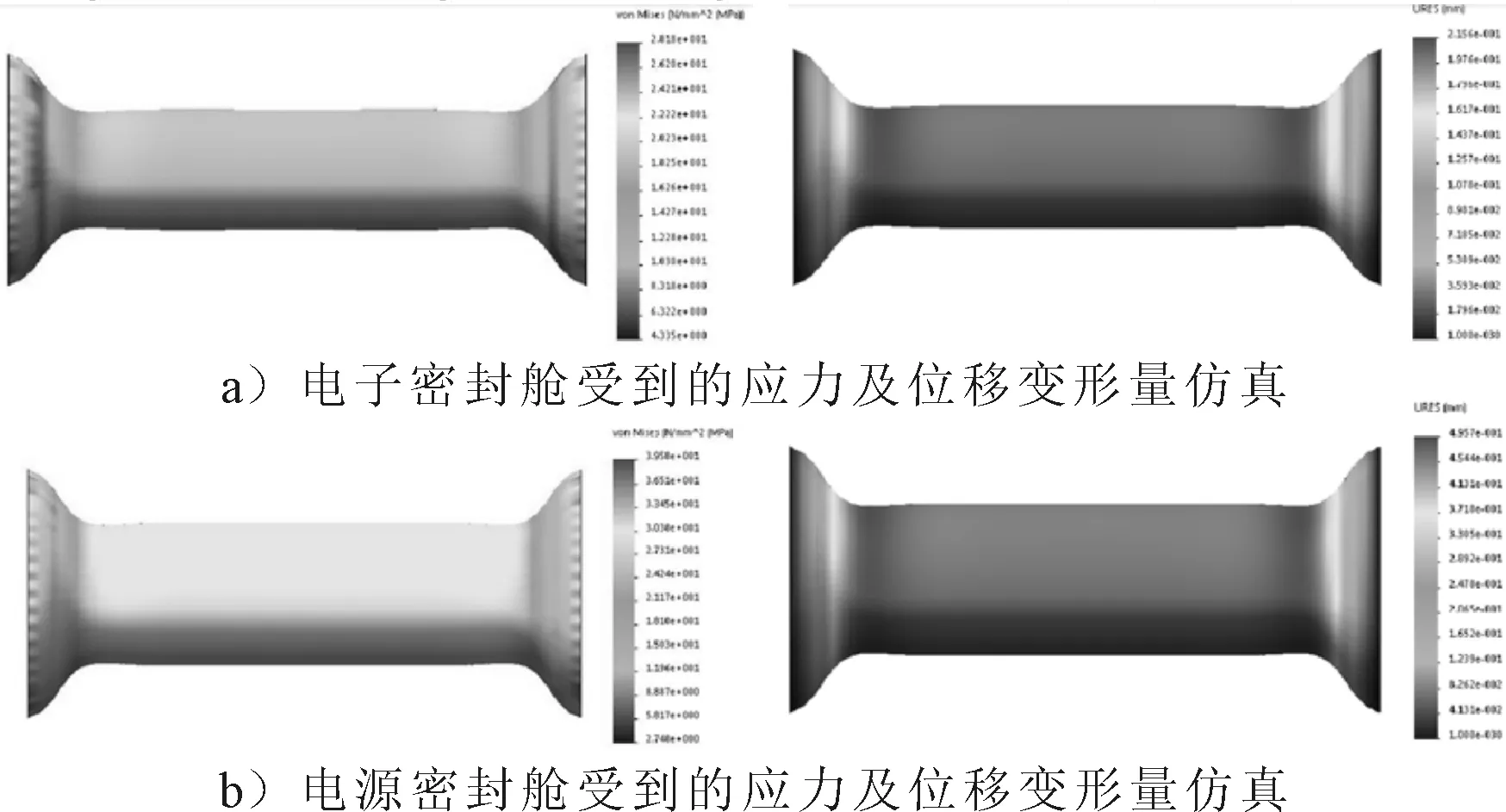
图8 密封舱受到的应力及位移变形量仿真
由图8可以看出,小型浅水观察水下机器人在水下深度200 m时,所受的最大压力小于40 MPa,位移变形量极小,本文选用的亚克力材料耐压可达60 MPa,因此整体内部布局及材料选用满足实际工况要求。
水下舱体外壳采用6061铝制材料,可提供水下200 m的耐压能力,左右两端分别安装有6个水密接插件,用于连接水下推进器、脐带缆和水下舱体。水密接插件均选用国际知名品牌产品,寿命长、质量稳定。其中脐带缆主连接器采用额外的固定外壳加强固定,防止脐带缆的来回摆动造成连接器损坏。水下舱体为推进器及其他水下设备供电。
1.3 推进器结构设计及电控系统的选型
1.3.1 推进器结构设计
推进器由3个推进器构成,其中包含1个垂直推进器和2个水平推进器,具体布局见图9。

图9 推进器结构设计
这个3个推进器能够保证水下机器人实现水下航行的进退、潜伏及转向,保证水下作业的灵活性,3个推进器能够保证较好的控制效果,实现稳定的水下观察。其中2个水平推进器可实现正反转,实现水下机器人的前进及后退,当2个推进器1个正向转动,另外1个反向转动,即可实现水下机器人的转向功能;垂直推进器也可以实现正反转,实现水下机器人的上浮及下潜。
1.3.2 电控选型
水下机器人的电控系统主要包括控制器、传感器及电调、摄像头、电源等。选用Pixhawks作为主控制器,实现对小型ROV的运动控制,选用水下专用的外转子无数电机及螺旋桨作为推进器,螺旋桨转速与推力见图10。

图10 螺旋桨转速与推力
摄像头采用CSI摄像头,能保证水下正常高清拍摄,电源选用高能量密度电池,从而能保证1 h的持续供电。
2 实验测试
水池实验将验证水下机器人的运动能力、方向感知能力及航行状态。通过这些实验结果,可直观验证设计方法的准确度,不断通过微调设计方案,从而得到理想的设计方案,并最终形成独有知识产权的设计经验。
2.1 运动功能测试
运动功能的测试方法有:①水下机器人放置在水池中,水面控制单元通过脐带缆与水下机器人建立通信后,水面控制单元应能够在屏幕上显示水下机器人水下姿态数据、部件工作状态反馈值以及监控视频等内容;②在空载下,输入相关控制指令控制水下机器人完成水平功能要求中规定的三轴运动和三轴旋转等相关运动,水下机器人的动作应与输入指令协调一致;③按照作业型水下机器人的作业功能,输入相关指令控制水下机器人,应能完成功能要求中的三轴运动和三轴旋转等动作,实现作业功能。
运动功能的测试结果为:①通信正常、数据反馈有效;②ROV动作和输入指令协调一致;③操纵模式切换有效,导航模式切换有效;④定深观察稳定,ROV无频繁晃动。
2.2 云台角度测试
云台角度测试方法:PCU控制云台正负最大值,查看上位机反馈云台实际角度与测量角度是否一致。云台角度测试结果,实际角度与控制角度一致为±90°。
2.3 航向、姿态及航速测试
航向、姿态及航速测试有:①磁导校准后,设备0度航向与地磁北极一致运动30 min,设备同一艏向角且同一位置时原航向角度与现航向角度偏差实测惯导校准后,设备0度航向与上电时所处方向一致,设备水下运动30 min,设备同一艏向角时原航向角度与现航向角度偏差实测功率;②设备在水平地面放置,观察本体实际横滚、俯仰值;③通过计米器和秒表进行记录并计算出设备航速,每航行10 m记录一次时间共记录3次,初始10 m不计用作加速区间,航行3次共9组数据取其中5组有效数据取平均值,并记录最大值。
航向、姿态及航速测试结果:①磁导校准后,设备0度航向与地磁北极一致运动30 min,设备同一艏向角且同一位置时原航向角度与现航向角度偏差实测,稳定后角度偏差为7°左右,惯导校准后,设备0度航向与上电时所处方向一致,设备水下运动30 min,设备同一艏向角时原航向角度与现航向角度偏差稳定后为5°左右;②设备在水平地面放置,水面姿态测试结果为:俯仰横滚为0°;③航速值数据:前行2.12 m/s,后退0.59 m/s,右侧0.26 m/s,左侧0.21 m/s。
3 结论
浅水观察小型ROV虽然可以通过水下动力学仿真、优化结构设计有效降低航行阻力、提高续航能力,但自身动力和体积存在阈值极限,只适用于水下流速相对较小的水域,若要取得更高运动性能,推力和体积重量的增大是避不开的问题。在此之前多数小型水下机器人均采用框架型结构,设备整体迎流面积较大,造成水阻增大航速下降,本设计方案采用流线型设计可有效降低水阻的同时减小体积,增强了运动性能。这种设计方案对于狭窄水下空间的检测维修具有实用价值,下一步应考虑针对特定应用场景对推进器布局和推力进行进一步优化,通过搭配不同的传感器,满足各类应用场景的实际需求,实现产业化应用。