基于知识图谱的仿真想定智能生成方法
2023-04-24司光亚
安 靖 司光亚 周 杰 韩 旭
1. 国防大学研究生院 北京 100091 2.国防大学联合勤务学院 北京 100858 3.国防大学联合作战学院 北京 100091
随着战争复杂性的不断加剧,模拟仿真系统已被广泛应用于作战理论创新、作战方案设计优化、作战能力评估,以及各类演习演训和装备采办活动中[1-2]. 作为初始化并驱动模拟仿真系统运行的基础支撑,仿真想定的质量直接影响系统运行效率和仿真结果的真实可信[3]. 由于仿真系统存在仿真层级(平台级、聚合级)、仿真模式(人在回路、人不在回路)、仿真模型等差异,对仿真想定的需求、可驱动运行的想定脚本的要求等并不完全一致. 因此,仿真想定的开发,普遍存在专业性强、定制要求高、迁移性差的问题. 针对这一系列问题,提出了一种基于知识图谱的仿真想定智能生成方法. 该方法通过多源仿真模型的实体链接,构建支撑仿真想定生成的知识图谱,提升仿真系统模型的重用性[4];研究适用于仿真模型匹配的实体对齐算法,提高数据匹配度[5]. 方法中待解决的核心关键技术包括:1)仿真想定的形式化描述. 与军事想定不同,仿真想定用以驱动仿真系统运行,应表示为结构化、形式化的想定数据,并确保其能被仿真系统识别、理解和使用;2)知识图谱的构建. 为支撑仿真想定的映射匹配,知识图谱构建过程中,要按照仿真想定的要素需求,搭建知识图谱框架,并有效链接主流仿真系统模型实体;3)实体对齐算法的选择. 在不同的仿真推演系统中,相同实体可能对应不同仿真模型,或拥有不同模型属性,需要选择有效的实体对齐算法,提高仿真想定与知识图谱的匹配速度和精度.
1 仿真想定的定义和形式化描述
仿真想定是在军事想定的基础上,面向模拟仿真系统,根据仿真实验的目的、边界条件、实验模式、仿真系统需求等,对初始战场态势,交战各方作战力量、武器装备、作战行动、交战规则、仿真规则等进行的设定. 作为仿真实验的基础,仿真想定为仿真系统的初始化、驱动和运行提供所需的各类数据集合和脚本,包括仿真实体、任务模型、规则模型等结构化、形式化的仿真想定数据,记为多维欧氏空间(实体、任务、规则),形式化描述如下:
2 知识图谱的构建
知识图谱作为一种符号化的知识特征表达方式,能够精准表示实体及特征之间的相关性[6]. 其构建流程是:在确定领域核心概念集的基础上,通过本体的概念建模、关系建模、属性建模,建立核心概念层次结构和关系,完成知识图谱框架构建;基于该框架,对现有的主流仿真系统等模型库进行实体链接,提升仿真模型重用性,完成知识特征的组合表达[7].
2.1 领域知识本体建模
作战领域的顶层概念较多,包括作战力量、武器装备、作战行动、战场环境等,需要根据知识图谱的构建目标选择领域核心概念集. 本文知识图谱的构建目标是支撑仿真想定数据映射匹配,因此,选定的核心概念集为想定的实体(包括作战力量和武器装备)、任务、规则. 根据《军语》《军事百科》、作战条令条例等,明确核心概念的准确定义,进行层次关系结构确定(部分层次结构关系描述如表1所示),并对本体的底层属性进行定义,完成本体的概念建模、关系建模、属性建模,构建知识图谱的基本框架.
1)作战力量本体知识结构
对于作战力量,本体知识结构如图1 所示,包括作战力量、军种、部队类型、属性4 层,本体间相互关系主要包括isA、hasEquipment、hasTask,含义如表1 所示.
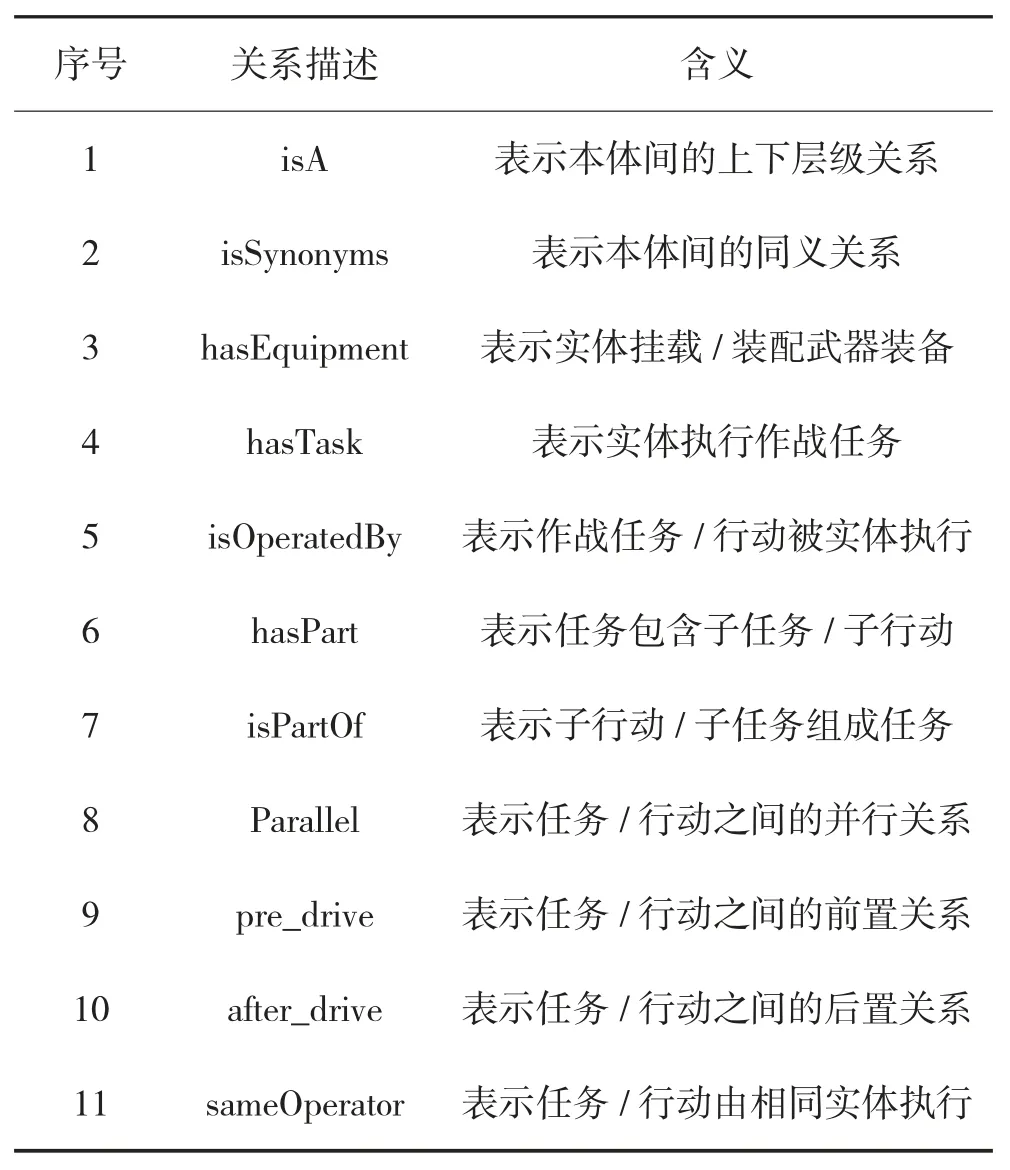
表1 本体层次关系表(部分)Table 1 Ontology relationship table(partial)

图1 作战力量本体关系结构图Fig.1 Ontology relationship structure of combat force
2)武器装备本体知识结构
对于武器装备,本体知识结构可以根据实际需要进行逐层分解. 例如,对于本文待验证实例“立体投送”. 武器装备本体知识结构可以分为5 层,本体间相互关系主要包括isA、isSynonyms、hasEquipment. 第1 层为武器装备本体;第2 层包括作战平台、投送平台、辅助平台3 个本体(isA);第3 层有31 个本体,包括登陆艇、气垫船、扫雷舰、半潜船、歼击机、运输机、直升机、雷达站等概念本体;第4 层具有2 030 个本体,包括具体型号的武器装备平台(is-Synonyms);第5 层属性,即为上层本体的各类实际参数,取自飞行器、舰船等各类知识库. 如,飞行器类包括最大飞行速度、最小飞行速度、飞行高度、最大载荷、武器挂载(hasEquipment)、载人数等多维性能指标.
3)作战任务本体知识结构
对于作战任务,本体知识结构分为任务、行动、行动属性3 层,本体间相互关系主要包括hasPart、is-PartOF、isOperatedBy、hasTask、sameOperator. 第1层为任务,是具有明确作战意图的军事行动,是由若干个行动组成(hasPart)的本体概念. 根据任务的粒度,可表示为组合模型(记为CM)或原子模型(记为MM),组合模型由原子模型组成(MM,isPartOF,CM).第2 层为行动,是任务实施过程中的步骤,不可再细分的本体概念,是原子模型. 第3 层为行动属性,根据仿真想定的形式化描述,主要包括:行动执行实体(MM,isOperatedBy,OPA)、行动发起条件、起始时刻、起始位置、行动起始状态、结束时刻、结束位置、行动结束状态、行动区域、行动路线、行动目标、行动持续时间、预期效果等. 为了更加完善表现本体关系,可进一步基于推理对本体关系(如hasTask、sameOperator 等)进行补充完善,推理表如表2 所示.
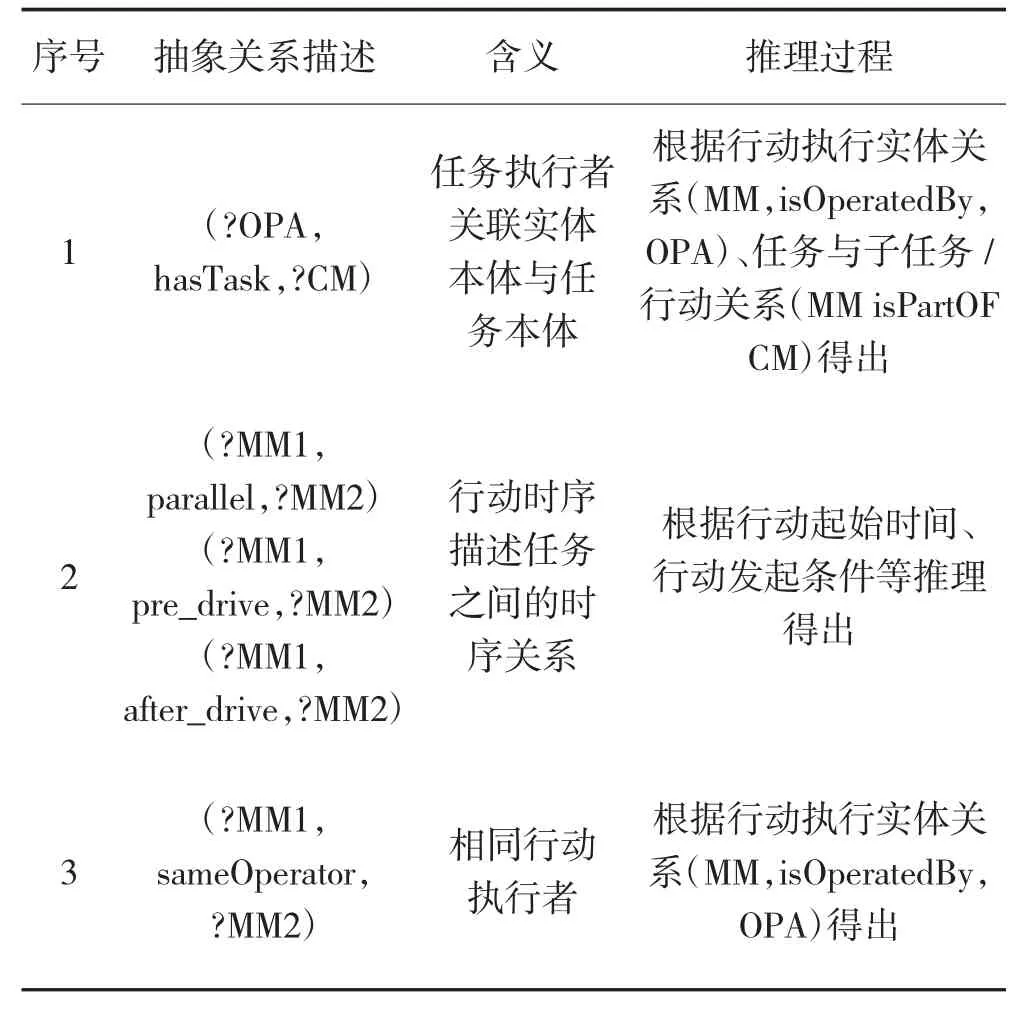
表2 作战任务本体知识关系推理表Table 2 Ontology knowledge relationship reasoning table of combat tasks
2.2 多源仿真模型实体链接
现有的实体链接方法主要分为3 类:局部特征链接方法,全局特征链接方法,混合特征链接方法. 本文采用全局特征链接方法,对主流仿真系统开放模型库等多源仿真模型数据进行整合.
全局特征链接方法基于强化学习全局特征抽取网络和用于相似性计算的神经网络. 由于篇幅受限,此处不再描述两个网络的训练过程,重点对网络的框架及应用进行阐述. 实体链接的基本思路如下:
1)通过基于强化学习的全局特征抽取网络框架,从待链接实体/指征项(entity/mention)的全局信息(记为S={x1,x2,…,xn})中抽取特征,框架描述如下:
状态空间wi:由当前特征和已选择的特征组成,对实体/指征项的第i 个特征xi进行选择时,将状态表示为一个连续的特征向量F(wi)={xi,wi-1,s}. 其中,xi表示当前特征的向量;wi-1表示所选特征集合的向量;s 表示待链接实体/指称项的向量.
动作决策yi:yi∈{0,1},0 表示当前特征对实体链接的精度没有提升,1 表示有提升. 通过策略函数πΘ(wi,yi)确定yi.
奖励函数r:是当前所选特征是否能够提高实体链接精度的评价,定义为r(wi|S)=Δs. 其中,Δs 表示实体关系混合特征与实体特征在分类器内特征权重的差值.
策略函数πΘ(wi,yi):
其中,F(wi)是特征向量,σ(·)是含有超参数Θ={W,b}的sigmoid 激活函数.
2)获得待链接实体/指称项特征之后,将它们与候选实体特征在隐藏层中进行级联,输入到双层神经网络,利用sigmoid 激活函数,获取实体/指称项m和候选实体特征e 之间的相似性得分sim(m,e).
该神经网络的损失函数采用交叉熵误差:
其中,s 是计算得到的相似度得分sim(m,e),t 表示实体是否为真.
3)通过加权计算得到各实体对<待链接实体/指称项,候选实体>的排序得分. 计算公式为
其中,sim(m,e)表示相似度得分,p(e|m)表示先验概率,α 和β 分别表示相似度和先验概率的权重系数,α+β=1.
4)根据r(m,e)对每一个候选实体进行排序,完成实体/指称项的链接.
3 基于知识图谱实体对齐的仿真想定匹配映射
3.1 实体对齐
考虑到名特征[8-10]和结构特征[11-12]能够分别从语义和结构两方面对实体进行刻画,本文基于上章构建知识图谱,采用两种特征相结合的实体对齐方法[13],将仿真想定中的实体分别匹配为已链接在知识图谱中的相似度最高的仿真模型.
两实体e1G1和e2G2之间的距离记为D(e1,e2),计算公式:
其中,Ds(e1,e2)表示实体名特征向量;Dn(e1,e2)表示实体结构特征向量;α 是调整两种特征权重的超参数. 显然,该距离决定了两个实体之间的匹配程度,值越小,则实体匹配度越高.
两种特征向量的计算方法分别如下:
1)实体名特征向量Ds(e1,e2)
采用平均词向量(averaged word embedding)表示[14-15].
词向量集合记为Vi={viw1,viw2,…,viwn}. 其中,viwk={xik1,xik2,…,xikk}词向量,表示词映射到空间向量的维度. 构造向量矩阵式(5)计算向量均值.
将计算得到的知识图谱实体e1G1的中心词向量VVi和想定实体e2G2特征词集合的每个词向量vtj,代入下述公式计算余弦相似度:
2)实体结构特征Dn(e1,e2)
由图卷积神经网络(graph convolutional network,GCN)捕捉实体邻接结构信息的生成[16].
将实体结构特征词转换为底层向量s={x1,x2,…,xn},随后在编码层使用Bi-LSTM 提取文本序列特征,输入特征向量xt与上一时刻状态ht-1共同生成状态ht,形成GCN 的输入h. 计算公式如下:
其中,i、f、o 分别为输入门、输出门和遗忘门;b 为偏置项;W 为参数矩阵.和分别为前向LSTM 和反向LSTM 输出结果;⊕表示向量级联,de为单向LTSM网络维度.
基于图结构GCN 编码层利用Bi-LSTM 生成分词特征向量,将每个节点的邻域内的相关信息编码为一个新的特征表示向量. hil-1表示输入向量,hil表示在l 层节点i 输出向量,图卷积计算公式如下:
直接使用上式会出现节点级差过大现象,因此,通过对邻接矩阵进行归一化解决问题,改进式子为:
最后,利用LTSM 结构对编码层基于图结构的编码输出进行解码,采用单向LSTM 将图结构的特征表示转换成序列结构的特征向量. 解码过程如下:
解码层输入:从编码层获得实体结构特征分词xi的上下文表示向量ht,前一神经元特征向量生成表示为Tt-1,前一神经元值c2t-1,解码层前一隐层向量h2t-1,最终输出向量Tt表示为:
其中,i、f、o 分别为输入门、遗忘门、输出门;b 是偏执项;W 为参数矩阵. Tt形成T,即实体结构特征向量Dn(e1,e2).
3.2 脚本生成
采用XML DOM 技术,生成仿真想定运行脚本.具体流程包括:
1)依据仿真推演平台的想定标准模板构建XML 仿真脚本的对象节点.
3)重复1)、2)直至所有节点插入数据,生成能够驱动推演的仿真想定运行脚本.
4 仿真想定生成实例验证和分析
以某作战样式“立体投送”行动为背景,生成仿真想定,验证能否驱动仿真系统按照预定行动时序运行(行动时序设计略).
1)对想定数据进行形式化描述,如表3 所示.

表3 仿真想定形式化描述Table 3 Formalization description of simulation scenarios
2)基于已构建的知识图谱,采用名称特征与结构特征相结合的实体对齐算法,对仿真想定进行实例化,映射为仿真系统可执行的仿真想定运行脚本.部分匹配结果如表4 所示.

表4 仿真想定实例化匹配结果Table 4 Matching results of examples of simulation scenarios
3)将生成的仿真想定脚本导入仿真系统,驱动“人不在环”的仿真推演,推演过程如表5 所示.

表5 仿真推演过程示例Table 5 Examples of simulation deduction process
通过仿真系统运行结果可以看出,本文所生成的仿真想定能够按照预定的行动时序,驱动仿真系统推演.
5 结论
本文设计并实现了一种基于知识图谱的仿真想定智能化生成方法. 基于强化学习全局特征抽取网络和用于相似性计算的神经网络,实现了主流仿真系统现有模型的实体链接,构建了知识图谱. 采用名称特征和结构特征相结合的实体对齐算法,实现仿真想定实体的精确匹配,生成仿真想定. 采用该方法生成“立体投送”行动推演仿真想定,并驱动仿真系统运行. 实验结果显示,仿真推演过程与预定行动构想实际相符,方法有效.