火星降落伞开伞过程形态参数辨识与应用
2023-04-19邹昕李明磊朱岱寅饶炜韩承志李莹
邹昕,李明磊,朱岱寅,饶炜,韩承志,李莹
1.北京空间飞行器总体设计部,北京 100094
2.南京航空航天大学 电子信息工程学院,南京 210016
载人航天与深空探测任务的减速着陆过程中,降落伞是一种非常重要的气动减速装置。例如俄罗斯的“联盟”“东方”等系列飞船,美国“双子 星”“水 星”“阿 波 罗”“海 盗”“火 星 探 路 者”“火星漫游者”“凤凰”“火星科学实验室”“洞察”“毅力”等系列飞船和探测器以及中国的“神舟”“嫦娥”“天问”等系列飞船和探测器都是采用降落伞进行减速着陆[1-10]。由柔性织物做成的降落伞包装后占用空间小,伞衣充满以后能够获得比原折叠状态大几十倍甚至几百倍的阻力面积,从而可以实现载荷的有效减速[11]。
火星降落伞在超声速、低密度、低动压的环境下开伞,整个工作过程是高速动态环节,也是火星着陆巡视器进入-下降-着陆(Entry,Descent and Landing,EDL)过程的关键环节之一[12]。降落伞开伞过程主要包括拉直阶段、充气阶段、减速阶段及稳降等4 个阶段。其中降落伞的充气阶段是降落伞整个工作过程中最复杂的一个阶段,直接影响降落伞的工作性能[13]。降落伞充气性能的精确获得和有效评估,是降落伞系统设计的关键,特别是精确计算降落伞设计参数和使用参数对减速性能的影响一直是困扰降落伞研制的难题。
在对降落伞开伞过程进行分析时,传统上主要依靠试验研究,但由于充气时间一般很短,有时不到0.5 s 就完成了充气过程,导致在这样的一个动态充气过程中试验状态的模拟和各项参数的记录非常困难。因此降落伞的风洞试验研究一般偏重在开伞载荷与气动力系数上[14-20]。而事实上,由于降落伞是个柔性织物透气体,其在开伞过程中经历了急剧的结构大变形,因而伞衣内外的流场十分复杂,只有准确地了解降落伞开伞过程的形态参数,才能深刻理解降落伞工作时的工作状态,也才能更好地从机理上解决关心的问题,从而提高降落伞的理论分析和研制水平。
目前现有技术中,降落伞的形态参数主要是依靠在大型地面风洞试验内,通过试验场固定安装的高速摄像机对开伞过程进行拍摄视频,使用单个或多个摄像机的视频数据,通过回放的方式进行测量[21-23]。在每一次开伞试验时,采用二维的图像像素长度对比方法,对该次拍摄的视频数据中的单帧图像与已知的完全充气完成的图像进行对比,进而分析降落伞的形态变化情况。
上述采用传统的摄像机拍摄视频,并在二维图像上进行对比分析的试验,只能使用简单的方法判定降落伞伞衣是否完全充气展开,分析结果的误差较大。一是因为高速摄像机的工作状态要求固定位置,无法获得真实开伞环境的检测数据;二是由于需要风洞内试验,无法获得真实的展开过程的运动参数;三是仅能够提供二维测量数据,无法辨识三维测量参数及其他运动参数,且定量分析能力不足,难以真实反映降落伞的充气性能。
由于降落伞为柔性体,火星降落伞开伞过程具有形态变化大、光照强度变化大、运动规律性差、目标遮挡等问题,存在难以获得测量信息的特点。在伞衣上作的标记相对于降落伞的轴有不确定性,不便于伞形态参数的测量,而且降落伞在吹风过程中大多会旋转,标记可能被遮挡,给伞形态参数测量带来一定困难。本文使用多算法融合的双目测量技术,在非接触式获得降落伞衣上的点的数字化三维坐标。根据三维坐标的计算值,最终辨识获得降落伞运动过程的形态参数是一种信息丰富的三维时空数据。这些参数为分析降落伞的充气性能和降落伞的运行形态变化提供了定量数据支撑。
1 双目视觉测量原理
双目视觉测量是通过双目相机采集目标图像对,获取目标点三维坐标的测量方法[24-26]。模仿人眼双目结构,根据采集目标图像对计算目标点在左、右图像上的视差(Dis-Parity)计算空间目标点的三维信息。图1 为双目立体视觉测量原理,其中Ol-XlYlZl为左相机坐标系,Or-XrYrZr为右相机坐标系,Ol-XlYl为左成像平面坐标系,Or-XrYr为右成像平面坐标系。空间任意一点P点,在左相机成像平面的投影点为Pl,在右相机成像平面的投影点为Pr(Pl与Pr互为对应点),f1与fr分别为左、右相机的焦距。
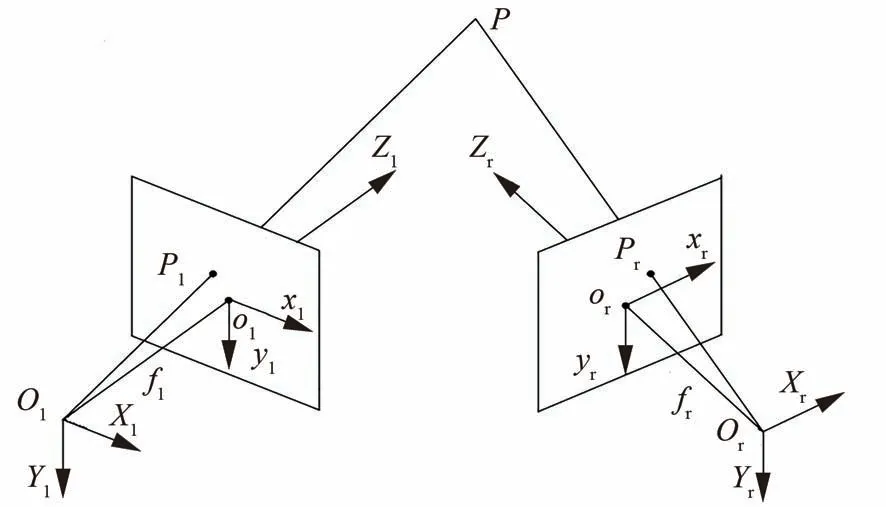
图1 双目视觉测量原理Fig.1 Principle of binocular vision measurement
通过匹配Pl和Pr的对应关系,根据双目视觉测量系统的定位原理可得到空间点P在左相机坐标系的空间三维坐标为
式中:B为左、右相机坐标系在水平方向距离,即双目视觉测量系统的基线距;f为左右相机的镜头焦距参数;cx、cx′分别是左右相机图像主点在光心水平方向上的偏移;cy为左相机的成像平面主点在扫描线垂直方向上的偏移量;X、Y、Z分别是P点在左相机坐标系下的三维坐标;x、y分别是P点在左图像平面的坐标;d为P点的视差值。其中,基线距B、镜头焦距f、cx、cx'以及cy等参数可通过相机内、外标定获取。
2 测量与辨识方法
2.1 降落伞靶标图案设计
火星降落伞伞型为盘缝带伞,伞衣的主体以白色为底色,有色靶标图案的颜色为红色。通过靶标图案设计柔性的三维坐标系,坐标轴在空间中允许一定角度的扰动,由此引起的测量值变化范围能够淹没在系统的测量噪声里。
图2 为降落伞靶标图案。靶标图案设计由3 类锥形经带条组合构成。第1 类经线条带由中心长条和两侧间隔短条组成;第2 类经线条带由3 条等长度的间隔长条组成,长度占1 个经带的2/3;第3 类经线条带只包含1 个长条,长条占满1 个经带长度,对称分布在两侧。条带中的第2 长的锥形条与最长条的比值等于最小锥形条与第2长条的比值,满足黄金分割比例,是艺术设计最理想的比例。通过3 类经线条带的组合布局,为降落伞的局部坐标系提供参考基准,建立形成唯一确定的降落伞笛卡尔三维坐标系统。经带条的边缘点与伞衣的背景白色形成鲜明的对比,为视觉测量提供了丰富的具有可区分度的标记点,能够准确地对定位点进行跟踪和测量。
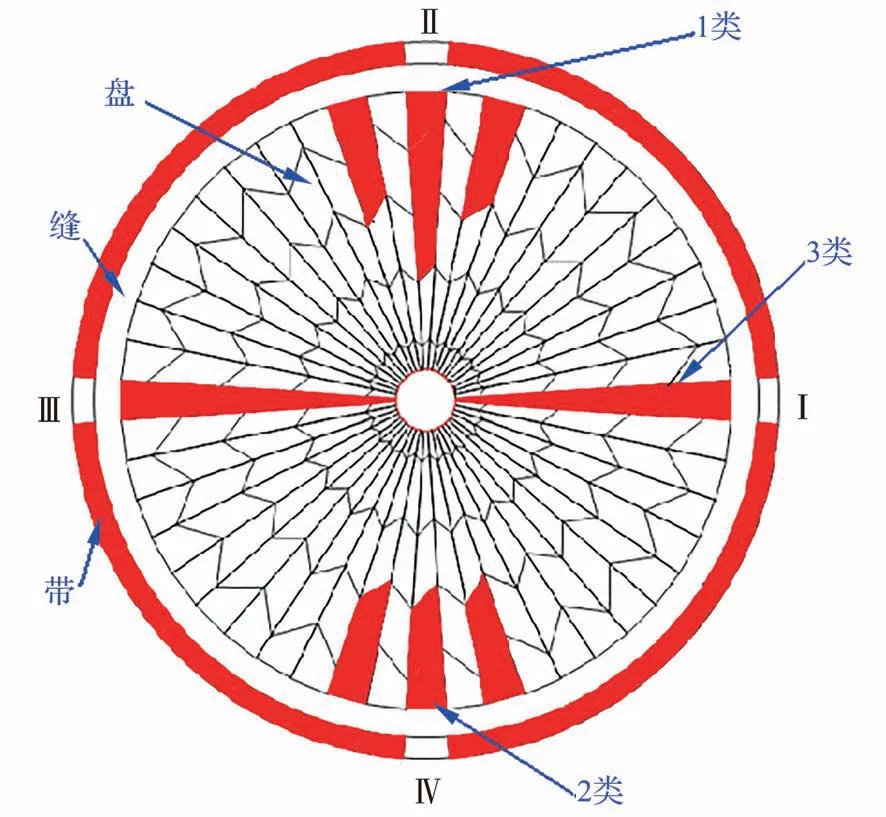
图2 降落伞靶标图案Fig.2 Parachute target pattern
2.2 双目相机内/外参标定
图3 为双目相机与降落伞的位置关系。火星着陆巡视器背罩伞舱法兰上安装有2 台开伞过程监视相机,其组成了双目立体视觉测量系统。开伞过程监视相机具有静态成像和动态摄像2 种功能,且动态摄像又具有30 fps 和20 fps 等2 种帧频模式。

图3 双目相机与降落伞的位置关系Fig.3 Position of binocular camera and parachute
双目相机外参数相对位置关系的标定需要搭建空间三维标定架,搭建与测量如图4 所示。通过2 台经纬仪,以基准尺为参照物建立空间三维坐标系,对靶标点进行观测,得到靶标的三维空间坐标。同时,利用双目相机对标定架进行成像,获得靶标点的二维影像坐标。根据共线方程和光束法平差算法,获得双目相机的相对位置关系。
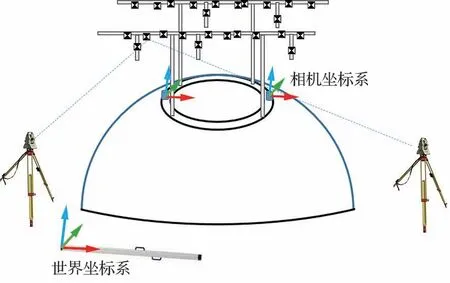
图4 双目相机标定示意图Fig.4 Calibration diagram of binocular camera on probe
光束法平差的目标函数g(P,X)是最小化同名点的重投影误差和[27],即
式中:P为投影矩阵;X为点的坐标;f(Pj,Xi)表示观测量第i个观测点Xi在第j幅图像上的预测投影过程,其是一个非线性表达式;数学模型中的m和n分别表示影像和观测点个数;Xij为图像中观测到的点。使用列文伯格-马夸尔特(Levenberg-Marquardt)方法对目标函数进行优化求解。基本求解过程首先需要将目标函数线性化,然后根据初始值进行迭代优化计算,直到待求参数收敛。
在探测器上完成2 台相机的内参数和外参数的标定。相机标定得到的内参数包括主距长度、主点坐标、径向畸变和切向畸变参数;标定得到的外参数包括2 台相机相互之间的基线长度和旋转矩阵参数。根据标定参数,进行三角测量,得到特征点在相机的像空间坐标系下的坐标值。根据标定参数建立2 台相机的像空间辅助坐标系的转换矩阵,可以实现测量点在不同坐标系下的坐标值转换。根据基线长度和相机的内参数等标定数据,实现立体影像的极线几何校正。图5为双目相机的极线几何关系。空间点M在2 台相机图像平面的投影点为m0、m1,2 个光心C0、C1的连线是基线,校正前的基线与2 幅像平面通常难以保证平行。基线与像平面的交点就是极点e0和e1,像点与外极点所建立的直线就是该像点的极线,左右极线与基线构成的平面就是空间点对应的极平面。线段l0、l1为极线,平面C0C1M称为极平面。极平面的映射关系包括旋转矩阵R和平移向量t。将2 幅影像进行极线校正,使对应水平扫描线平行,然后同名像素的匹配计算限定到沿极线方向的一维搜索范围。
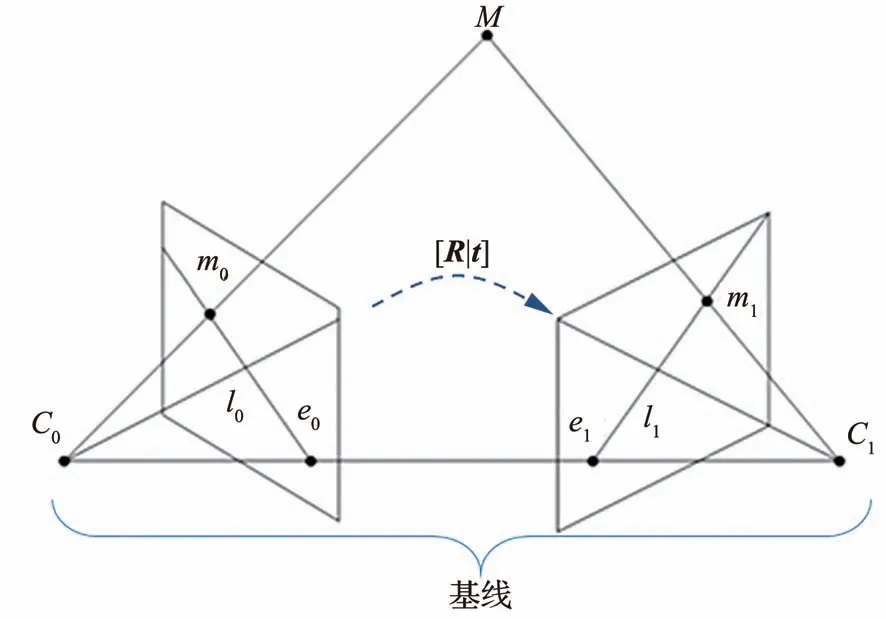
图5 极线几何关系Fig.5 Geometric relation of polar lines
2.3 基于暗通道的图像增强
在相机仰视天空对降落伞进行拍照时,上方照射的阳光和大气漫散射光对影像的质量产生很大的退化干扰。传统改善画质算法的主要方法是利用某些对比度拉伸算法来处理,降落伞影像的观测对象比较单一,颜色丰富度低,彩色图像拉伸后颜色失真比较严重。
考虑到降落伞影像中的成像目标主要是天空和伞衣,场景对象相对简单,采用基于暗通道的降落伞影像增强技术。考虑非天空的降落伞区域里,某一些像素总会有至少1 个颜色通道具有很低的值,由此预估透射率图,利用导向滤波对预估透射率图进行滤波处理,优化透射率图。根据透射率图,重新校正影像,对图像质量进行改善,有效地减轻各种噪声和过曝光等环境因素的影响。
利用直方图均衡化技术,增加图像的颜色阈的拉伸范围,提高质量;通过提取梯度影像,获得梯度增强的改进图像;通过图像特征提取算法,实现图像中突出目标的特征像素信息,便于特征提取和目标分割。在实际的图像中,需要在计算像素灰度梯度时进行离散化求解。图像梯度算法考虑图像的每个像素的某个邻域内的灰度变化,利用边缘临近的一阶或二阶导数变化规律,对原始图像中像素的某个邻域设置梯度算子,采用小区域模板Sobel 算子进行卷积来计算。
2.4 稀疏编码的超分辨率重建
在伞绳拉直之后,降落伞的伞衣距离相机约30 m,影像上的特征点结构变得模糊。为了提高三维坐标的测量精度,必须在左右影像上,提取出精确的特征匹配点。
由信号的稀疏表示理论可知,低分辨率图像块y也可以使用过完备字典稀疏表示,其在低分辨率字典Dl中的稀疏表示α模型为
式中:F是用来提取图像的特征的运算符;ε为设定的可调图像亮度阈值。由于人眼对图像中的高频分量更为敏感,因此常用F提取图像中的高频成分,这样做可以更有效地恢复重建图像中的高频信息。
显然,式(3)是一个非确定性多项式问题(Non-deterministic Polynomial,NP)。但是根据Donoho[28]的研究结果表明,只要系数向量α足够稀疏,上述问题就可以通过式(4)的ℓ1范数最优解有效解决:
式中:λ是惩罚参数,用于平衡α的稀疏性和y的近似解的精度。本文中同样使用4 个一阶和二阶梯度特征提取图像的高频信息:
Yang 等[29-32]通过在低分辨率图像块的稀疏表示模型中增加重叠区域一致性正则表达式来加强相邻图像块的兼容性,优化后的公式为
式中:Pc为提取当前正在重建的图像块和上一个重建过的相邻图像块之间的重叠区域;w为上一个重建的高分辨率图像块在重叠区域的值;Dl为低分辨率字典;Dh为高分辨率字典;ε1、ε2为2 个可调图像亮度阈值。
式(7)可以转化为
式中:β是一个平衡参数,用来平衡稀疏解的精度和相邻块的兼容性。
式(8)可以进一步转化为
采用基于稀疏字典编码的超分辨率重建算法,产生超分辨率重建影像,对图像进行亚像素级别的特征点定位。超分辨率增强处理的影像解决了降落伞前景和背景的边界模糊问题,突出纹理细节和边缘特征信息。将特征点的定位精度从像素级提到0.2 个像素,提高了特征匹配的精度,进而对三维坐标解算的精度提供了保障。
2.5 特征跟踪扩展卡尔曼滤波
一般情况下的滤波算法在检测目标以及提升目标跟踪的功能方面都做出了很大贡献,而扩展卡尔曼滤波在此基础上增加了1 项贡献,即其能够通过线性转换解决非线性化的滤波问题[33-37],同时处理信号时满足最小均方误差准则估计的情况下建立观测方程以及状态方程,估计结果往往比测量值更加接近真实值,在跟踪过程中也就能准确地预测目标的坐标和方位,以实现目标的准确跟踪。考虑目标观测要求估计其状态的动态非线性系统模型。
动态方程为
式中:动态噪声ωk-1和观测噪声vk是独立、零均值的高斯白噪声,其协方差阵为Q(k)、R(k);f(xk-1)和h(xk)是已知的非线性函数。如果非线性函数足够光滑,那么可以沿条件均值̂k|k和|k-1将其展开成泰勒级数:
式中:I为单位斜对角矩阵。
卡尔曼增益矩阵为
式中:E表示取均值运算。
图6 为特征跟踪扩展卡尔曼滤波的算法流程。首先,在图像上提取特征像素点并在时间序列图像上跟踪特征点;然后,利用对极几何关系从立体图像中计算特征点的三维坐标,利用三维坐标预测并修正特征点的位置;最后,将三维点坐标和图像特征点进行光束法平差,获得优化的点测量结果。
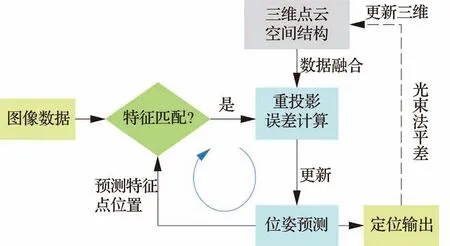
图6 扩展卡尔曼滤波算法流程Fig.6 Flow of extended Kalman filter algorithm
2.6 降落伞形态参数辨识
降落伞的柔性结构在充气过程中,形态轮廓变化复杂,与理想的圆形张满形态差异大,给形态参数自动测量和辨识带来挑战。考虑降落伞的伞衣影像基本位于图像的中部,而图像的边缘是背景天空像素。以图割(Graph Cut)理论为基础建立了影像的图模型,将图的基本结构与像素的规则邻域关系耦合,以像素为节点,相邻像素之间建立起边,构建了基于高斯混合模型的二值化分类数学模型,分别从图像的中心和边缘对降落伞的前景伞衣和背景天空进行高斯分布建模,使用最大流最小割的方法实现伞衣的分割提取。对输入的每帧图像,快速、自动地分割出降落伞的成像像素。结合伞衣边缘点的三维测量坐标值,估计观测距离,获得像素的空间分辨率,最后得到降落伞的最大直径和投影面积,知悉降落伞的展开程度。
利用伞衣底边的点的三维重建坐标在时间维度上的变化,差分运算计算降落伞体的摆动速度及方向。降落伞从弹射到展开,可能有若干帧图像可以被拍摄,根据二维图像序列和三维测量结果数据,并结合降落伞的设计数据,得到降落伞的拉直速度。
用地面标定试验获得的相机标定数据和距离标定数据,可以计算出任意像素点在某一成像时刻,其相对于相机主光轴的偏角θ。某一时刻,通过选中降落伞中心点在影像上的投影像素的像空间坐标位置(x,y),计算得出该时刻的摆动角度值为
式中:f'代表相机标定得到的像素单位的焦距长度值。摆动角度如图7 所示。
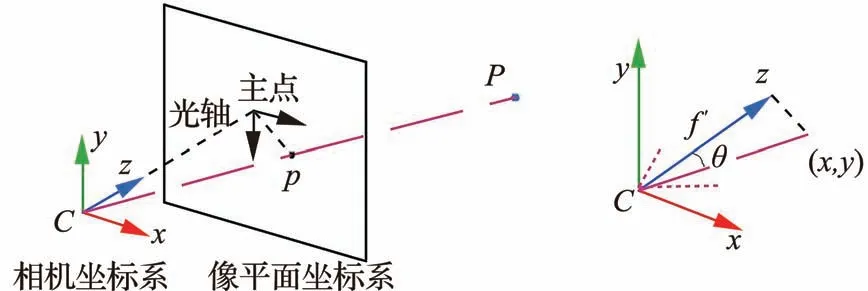
图7 降落伞摆动角度示意图Fig.7 Schematic diagram of parachute swing angle
拉直速度的计算依赖相机在降落伞拉直阶段获得的影像数据的数量和质量。在连续帧影像之间,通过软件交互选出同名点,根据三维结构计算与显示的同名点在不同时刻距离监视相机的距离值,结合影像序列的时间信息,计算得到降落伞的拉直速度值。
图8 为降落伞拉直速度计算示意图。如图8所示,P1和P2是2 个时刻的降落伞标记点在相机空间辅助坐标系下的三维位置。D1和D2分别是2 点投影到主光轴延长线上的位置距离成像中心点的距离。根据2 个成像时刻的t1和t2,可以计算得到该时间间隔内的拉直速度为
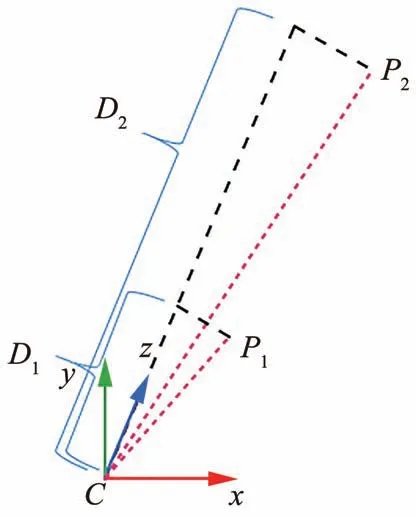
图8 降落伞拉直速度计算示意图Fig.8 Calculation schematic of parachute deployment speed
针对相机采集的视频图像数据,结合标定试验获得的标定数据,对整个开伞过程中的降落伞的位置(三维轨迹和拖曳距离)、形态(投影面积)、尺寸(最大直径)等进行几何形态参数测量和辨识,以及拉直速度、摆动速度和运动轨迹等运动状态参数的测量和辨识。
3 高空开伞试验验证
火星全尺寸降落伞高空开伞试验,采用TY-6 火箭作为运载平台,将参试设备送至地球高空,模拟火星超声速、低密度、低动压的开伞条件。其中,2 台开伞过程监视相机在试验前完成了相机标定,试验中开机工作拍摄了整个开伞过程。
基于辨识方法开发的降落伞视觉测量与辨识软件,如图9 所示,对2 台开伞过程监视相机采集的视频图像数据,结合标定试验得到的标定数据,进行降落伞形态参数辨识算法验证及分析。
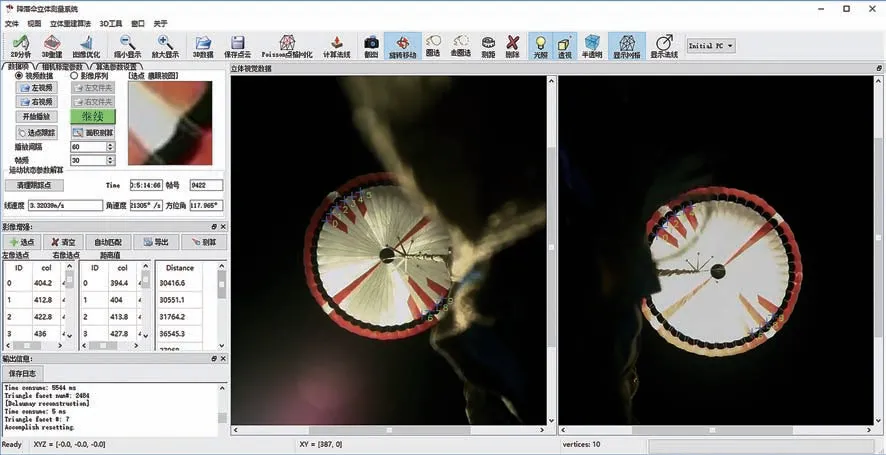
图9 降落伞视觉测量与辨识软件界面Fig.9 Software interface of parachute visual measurement
图10 为伞连接带集束部分的测量值。舱体到伞连接带集束部分的端点距离设计值为5 500 mm。相机第62 帧图像,清晰测量了伞连接带集束部分的端点,端点到舱体的距离测量值为5 548.3 mm。与设计参数高度吻合,测量值与设计值的相对误差为0.88%。
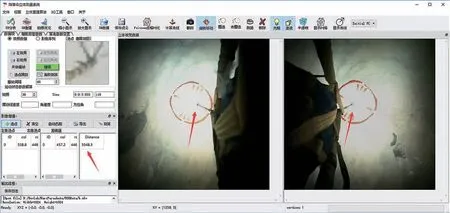
图10 伞连接带集束部分的测量值Fig.10 Measurement value of connecting belt cluster part
相机第9 422 帧图像,在稳降过程中,满足成像清晰条件。在伞面底边上选点,三角测量的距离测量值在30~31 m 范围,与降落伞展开后伞衣底边与舱体的距离(拖曳距离)设计值31.2 m 能够良好吻合。
图11 为伞投影面积的测量值。降落伞最大直径为11.2 m,按照设计参数计算,降落伞完全撑开的最大投影面积为98.5 m2。在伞面完全展开时,测量辨识得到伞投影面积值变化在89.0~98.2 m2,如图11 所示的1 帧良好观测时刻的面积测量值为95.26 m2。稳定后的测量辨识得到降落伞运动参数:伞衣底边的线速度<10 m/s,角速度<10(°)/s。
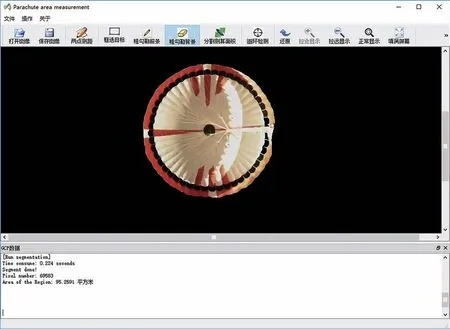
图11 伞投影面积的测量值Fig.11 Measurement value of parachute projection area
通过火星全尺寸地面高空开伞试验,开展了降落伞开伞过程形态参数辨识,辨识结果理想,实现了预期目标,验证了该辨识方法能够达到较高的辨识精度,具有较好的准确性和鲁棒性。将降落伞设计参数作为真实值,与其设计参数比较,得到降落伞展开后的投影面积测量精度为1.8%,深度方向伸展距离精度为0.88%。将图像人工逐帧选点测量作为真实值,本文算法通过自动跟踪点并自动计算,与人工测量方法比较,得到降落伞的摆动角度误差为0.2°,降落伞展开后的摆动速度误差为0.4%。
4 在轨应用
中国首次火星探测任务“天问一号”探测器在2020 年7 月23 日 发 射 升 空,于2021 年5 月15 日成功着陆火星。2 台开伞过程监视相机在降落伞开伞前已开始开机工作,记录并见证了降落伞完美绽放的时刻,并实时监测着陆火星的开伞状况,在轨实拍图像如图12 所示。
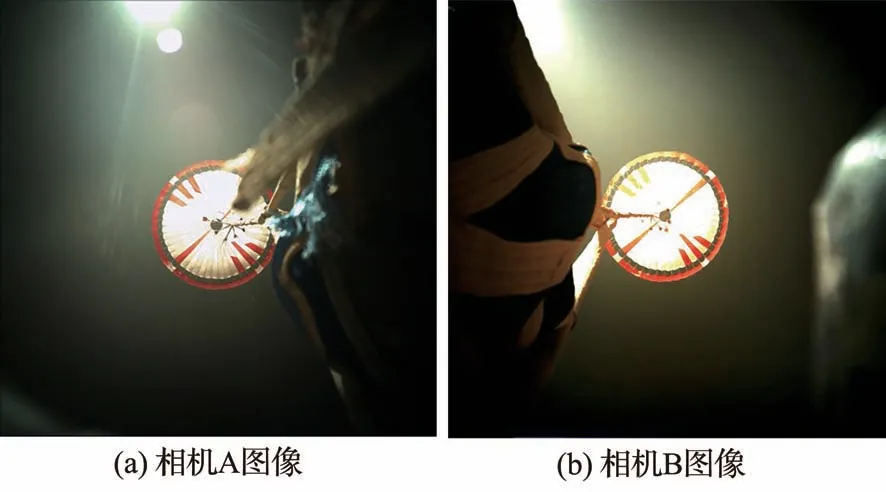
图12 开伞过程监视相机在轨实拍图像Fig.12 Images of parachute opening process by surveillance cameras on-orbit
利用开伞监视相机A、B 采集的视频图像数据,结合标定试验获得的标定数据,对整个开伞过程中的降落伞的位置、形态、尺寸等进行几何形态参数测量和辨识,以及拉直速度、摆动速度和运动轨迹等运动状态参数的测量和辨识。
在伞绳拉直阶段,伞绳拉出后,伞衣没有展开前,伞衣不可见,伞绳一端处的伞包内衬(橘色)逐渐显露,选择伞绳一端处的伞包内衬点,跟踪测量三维点坐标。伞绳拉直后,伞衣开始拉出、充气展开,伞衣可见,选择伞衣底边点,跟踪测量三维点坐标。图13 为伞拉直和充气阶段的伞绳和伞衣的测量选点示意图,其中图13(a)、图13(b)为伞绳拉直跟踪测量选点的示例;图13(c)、图13(d)为充气阶段伞衣底边跟踪测量点的位置。
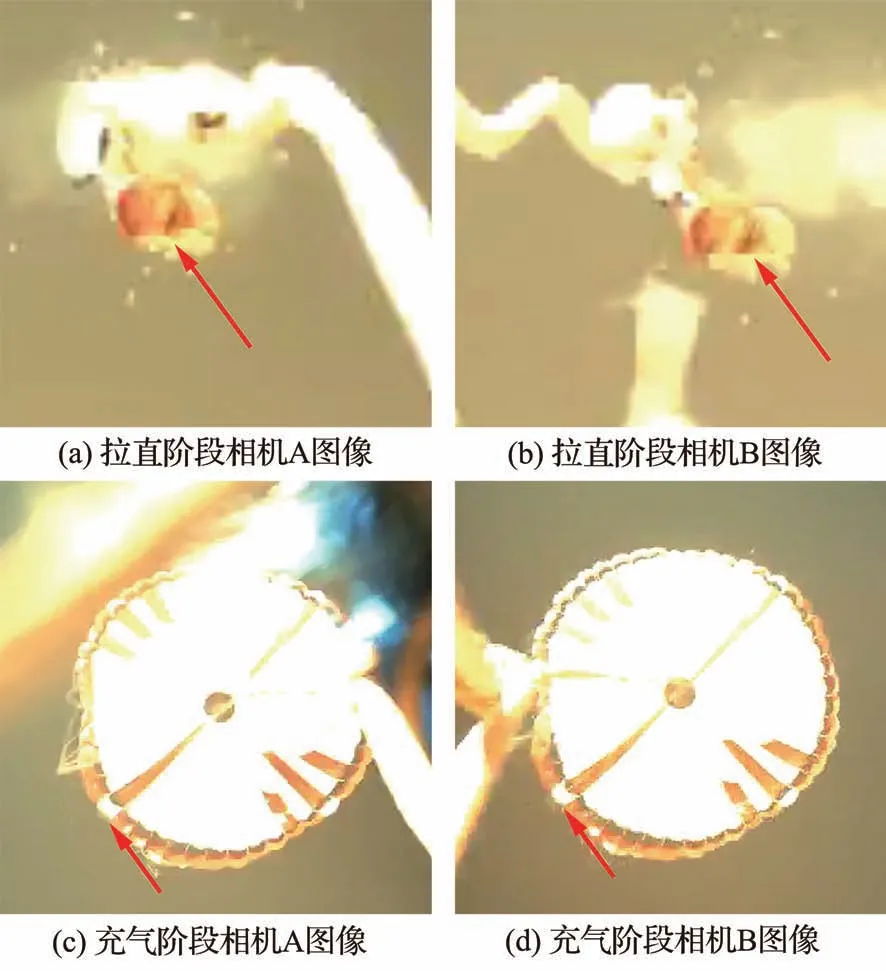
图13 伞拉直和充气阶段测量选点示意图Fig.13 Measuring points in parachute straightening and inflating phases
将图13 伞拉直和充气阶段跟踪测量的三维点坐标一起绘制在三维坐标轴下,得到图14。通过数据分析可知,伞绳拉直阶段,伞绳端点部分拉出的轨迹基本沿直线运动。当伞绳拉直后,伞衣充气至完全展开前,有一段伞衣的呼吸状态,此时会有小幅度的收紧再舒张状态。本文选择跟踪的伞衣底边测量点的三维轨迹,如图14 所示,放大窗口显示内容,在XY平面方向上有1.5 m左右的摆动变化,在Z方向上也存在约1.5 m 的伸缩距离变化。
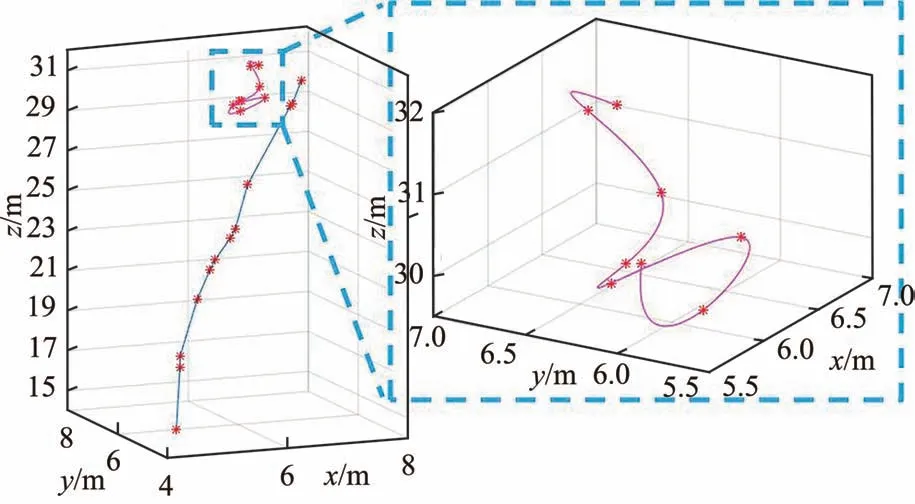
图14 伞拉直和充气阶段的三维轨迹Fig.14 Three-dimensional trajectory of parachute straightening and inflating phases
降落伞整个开伞过程,随着时间的增加,伞拖曳距离呈现先增加后逐渐稳定的变化趋势。在降落伞拉直阶段,拖曳距离加速上升;在充气和减速阶段中,拖曳距离变化范围为28~31 m。在抛大底时刻附近,拖曳距离值存在2~5 m 范围的波动,之后逐渐趋于稳定;在稳降阶段,历时13.9 s,选取成像清晰时刻,进行距离测量,测量结果在30 m 上下波动,如图15 所示。图15 中横坐标的起点时刻为伞包从弹伞筒弹出的起始时刻。
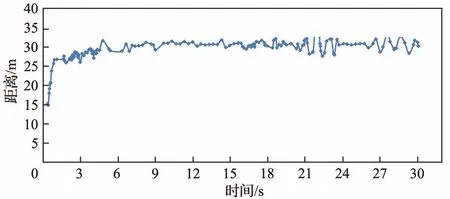
图15 伞拖曳距离随时间变化曲线Fig.15 Curve of parachute trail distance with time
在伞充气阶段,从相机图像第40 帧开始,进行伞直径参数采样测量,如图16 所示。伞衣充气阶段,降落伞最大直径随着伞衣打开逐渐增大,直至1.6 s(相机图像第49 帧)伞衣第1 次完全展开达到顶峰(伞投影面积为93.33 m2),之后存在一小段明显的喘振现象。在进入减速阶段后,伞的直径在较小范围内波动。
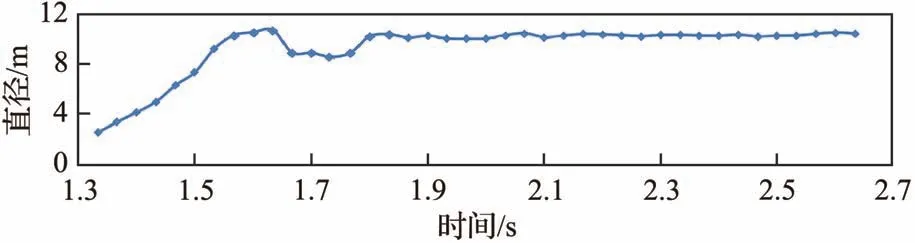
图16 伞充气和减速阶段最大直径随时间变化曲线Fig.16 Curve of maximum diameter with time in parachute inflating and moderating phases
图17 为伞减速阶段线速度/角速度随时间变化曲线。在伞减速阶段,降落伞的角速度和线速度同样不断波动,且数值较大。选择伞衣底边点,测量降落伞自转的角速度变化为1.38~12.48(°)/s;降落伞自转的线速度变化为1.48~13.45 m/s。角速度和线速度的波动趋势保持一致,如图17 所示。随着时间的增加,降落伞旋转的角速度和线速度波动范围越来越小。在伞稳降过程中,降落伞自转的角速度为0.97~4.02(°)/s,降落伞自转的线速度为1.05 ~4.33 m/s,变化幅度均较小。
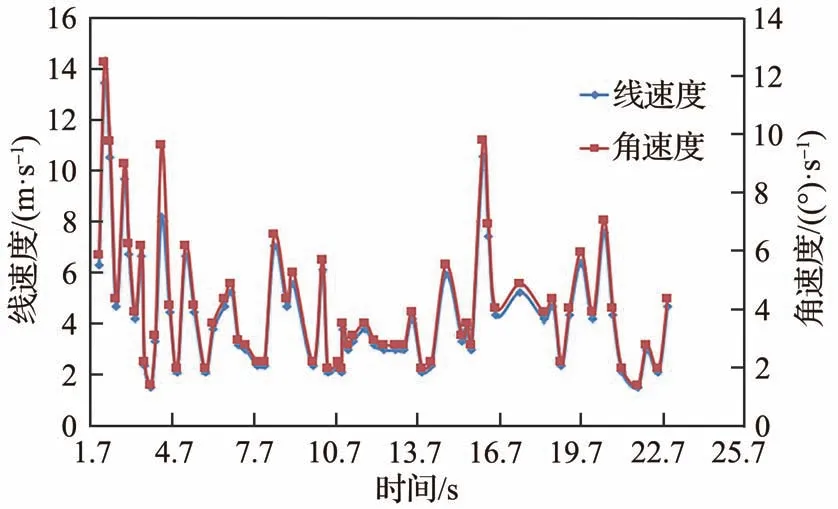
图17 伞减速阶段线速度/角速度随时间变化曲线Fig.17 Curves of linear velocity, angular velocity with time in parachute jitter phase
图18 为降落伞摆动角度随时间变化曲线。由图18 可知,选择伞衣底边点,降落伞摆动角度的幅度,随着时间的增加越来越小,整体摆动角度范围不超过2.5°。
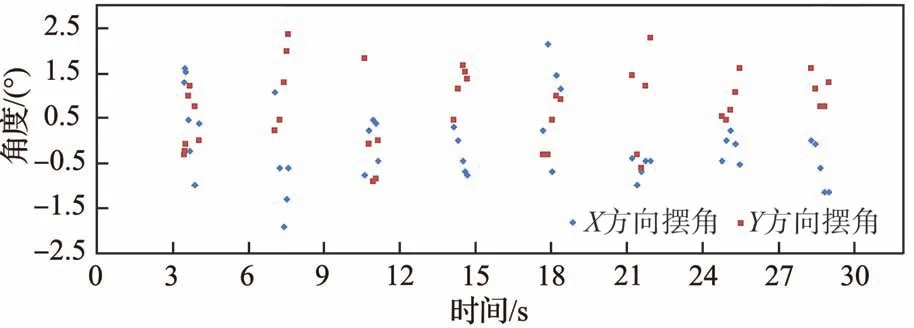
图18 降落伞摆动角度随时间变化曲线Fig.18 Curve of parachute swing angle with time
5 结 论
通过地面试验和在轨飞行验证可得结论如下:
1)该方法为在时间、三维空间尺度上定量地测量与辨识降落伞开伞过程的形态参数提供了一种高效、精确的技术方法,解决了降落伞开伞过程的形态变化大、光照强度变化大、运动过程规律性差、存在遮挡等情况下的柔性目标特征点提取、匹配及跟踪的难题。
2)该方法辨识的降落伞开伞过程形态参数为分析降落伞的减速性能和设计新型的降落伞提供了数据支撑。
3)该方法可用于柔性目标运动过程的形态参数测量与辨识,且在准确性、稳定性和鲁棒性方面具有优异的整体性能。
