一种模块组装6U立方星的总体设计与在轨验证方法
2023-04-15刘莹莹刘光辉张佼龙冯振欣
黄 河,刘莹莹,刘光辉,张佼龙,李 朋,张 帝,白 博,冯振欣,周 军
(1. 西北工业大学精确制导与控制研究所,西安 710072;2. 西北工业大学宁波研究院,宁波 315103)
0 引 言
立方星采用大量标准化商业货架产品,具有研制周期短、发射灵活、易于组网的优势[1],近十年来得到了快速发展,立方星在轨成功率从2015年的30%提升到了2019年的75%[2]。
立方星已经成功应用于空间科学探测、对地遥感、新技术验证、航天科普等领域[3]。国际上积极地在探索将立方星应用于月球、小行星以及卫星集群编队等领域[4-7]。目前国际上发射的立方星大都是2U,3U立方星,受到体积和能源的约,这类立方星的功能十分有限,而6U立方星能够利用至少3U空间作为卫星平台部分,具有模块化快速组装的优势,大大拓展了立方星的空间任务应用能力。
机械结构的模块化设计是实现6U立方星模块化组装的基础。文献[8]从结构构型、结构材料、结构连接方式和结构评价指标四个方面论述了框架式立方星结构,指出了未来小卫星结构通用化、小型化、专用化、多功能一体化的多元发展趋势。美国空军研制的Grissom立方星是一种能够适应多种任务的通用微纳卫星平台,文献[9]对这一新型6U立方星平台的结构抗冲击能力进行了评估。文献[10]介绍了立方星在地球大气偏振模式探测、低热层大气探测以及L波段短报文试验方面的应用,然而这类立方星平台结构往往只能适应单一载荷。上述立方星的模块化组装一般是针对于PCB电路板的板卡级模块化组装。
可靠的测控和高效的数传是保障立方星空间遥感任务的前提。文献[11]提出了在3U立方星平台上搭载近红外光谱仪载荷,利用图像开展温室气体监测,文献[12]提出了采用6U立方星平台进行森林火灾监测。然而均没有就6U立方星的批量遥感图像的高速下传问题进行可行性分析。文献[13]设计了一种面积将近1 m2的反射阵列天线,有望解决立方星深空探测过程中的通讯难题,然而这种可展开天线结构复杂,应用于近地轨道立方星大容量数传还需要同时解决高能耗问题。文献[14]针对6U 立方星平台应用于土壤湿度监测问题中的数据传输问题,在240~270 MHz频段,设计了VHF通信天线,其数据传输量不足以支撑遥感图像的批量下传。CAT-2 6U立方星开展了GNSS-RO测量,搭载了两套VHF/UHF天线和1套S频段天线,每天最多可以传送10 MB有效载荷数据[15]。因此,有必要在考虑立方星体积和功耗约条件下,将立方星的测控数传进行一体化设计,提升立方星数据下传能力,形成一种通用的测控数传标准化模块,便于卫星平台的快速集成。
近地空间废旧卫星的离轨问题,近年来受到越来越多的关注。采用推力器进行离轨是通用的离轨方式,取决于高效的微型推力器设计。NASA为月球“手电筒”6U立方星设计了一个2.5U绿色单组元推进系统,推进分系统总质量为6 kg[16]。文献[17]分析并比较了一种适用于6U立方星的水工质微型推进系统,然而占用体积较大,不适合用作6U 立方星的离轨推力器。将离轨帆设计为满足立方星结构约的标准化模块,为立方星的快速离轨提供了新的解决思路。
高效的能源管理和可靠的姿态控制系统模块化设计是立方星模块组装的关键。文献[18]将立方星能源系统和姿态控制系统集成为1个1U立方体模块,旨在能够满足多种载荷任务需求,然而该模块本身能力弱,拓展性不强。文献[19] 针对立方星在能量来源严重受限条件下如何提高太阳能利用率的难题,提出一种适用于立方星的集中供电式空间微电源架构,并设计基于改进粒子群优化算法的最大功率点跟踪控制策略来提升能量转换效率。受到结构尺寸的约,立方星携带的太阳能帆板面积有限。让立方星长期处于对日定向模式,能够显著提高其能源转换效率。对于2U,3U立方星,一般采用磁力矩器进行姿态控制。文献[20]针对立方星体积与功耗限制等情况,采用多目标优化的方法,研制带芯磁力矩,实现了磁矩大、体积小、重量轻、功耗低。然而,仅使用磁力矩器无法实现对日定向稳定控制。对于6U立方星平台来说,采用微型三轴飞轮进行姿态控制,能够大大提高控制精度。文献[21]针对27U立方星,提出了一种利用金字塔构型反作用轮阵列和磁力矩器的姿态控制系统,能够用于解决大结构立方星姿态控制输出力矩不足的难题。目前,关于立方星的姿态控制问题,大都集中在控制算法本身,如纯磁力矩器控制,而关于能源约条件下对日稳定控制则研究较少[22]。因此,需要综合考虑卫星能源管理和姿态控制要求,形成通用化可配置的卫星能源和姿态系统单元模块。
综上分析可知,受到立方星本身体积、功耗、数传能力、测控可靠性、轨控能力等因素的影响,为提升6U立方星的多任务适应能力,需要进一步围绕6U立方星的结构布局、测控数传、电源分系统、姿控分系统、离轨分系统等开展功能单元级的模块化设计,将立方星由板卡级模块组装提升为功能单元级模块组装。6U立方星模块组装涉及到机械结构的快速组装,能量流、信息流和数据流的适应性匹配,从而实现卫星平台和有效载荷的松耦合设计,其基本思想如图1所示。
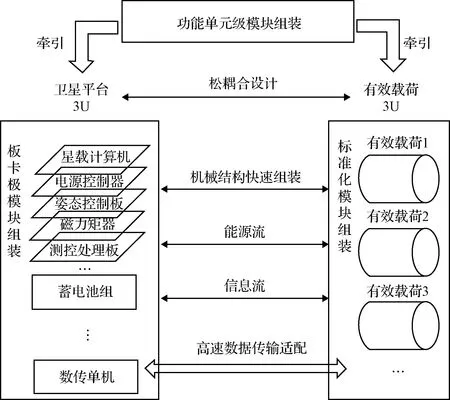
图1 6U立方星模块组装的基本思想Fig.1 Basic idea of modular assembly for a 6U CubeSat
本文综合考虑立方星结构模块组装的多任务适应性、能源约条件下的姿态控制与测控数传以及快速离轨策略等问题,提出了一种标准化模块组装6U立方星的总体设计方法。并通过中国青少年科普卫星工程八一03卫星(BY- 03)在轨试验数据,验证了模块组装6U立方星总体设计方法的有效性。
1 模块组装的6U立方星的结构设计
立方星的部组件一般采用国际标准的机械和电气接口,通过PC104接插件连接在一起。为了提高立方星的多任务适应能力,实现立方星的快速组装,需要从结构总体设计的角度,将立方星平台部分和载荷部分进行松耦合设计。对于6U立方星而言,可以将卫星平台部分设计为通用化平台,而卫星的载荷设计需要适应卫星平台的机械和电气结构要求。
为此,本文提出了一种卫星平台和载荷松耦合设计的6U立方星结构和设备布局方案。将6U立方星的左侧设计为卫星平台部分,右侧设计为卫星载荷部分,卫星平台和载荷之间通过接口的适配性设计,能够实现整星的快速组装与集成测试。
卫星结构部分采用标准6U立方星平台,外部结构为框架+横梁的形式,内部结构为标准PC104板卡结构,可以兼容标准板卡,实现模块化组装。载荷部分通过总装直属件替代原横梁部分,完成载荷与框架的适配性连接。
机构部分为太阳能帆板展开机构,卫星入轨前机构部分在星箭分离机构内处于折叠收拢状态,待卫星入轨收到解锁指令后太阳能帆板展开,为整星提供电能。
如图2所示,左侧为卫星平台,安装标准PC104板卡部组件,自上而下依次为:UHF天线、磁力矩器2套、GPS接收机、电池组1(8块电池)、电池组2(4块电池)、电源控制器(共3层板)、展开机构控制器、飞轮组(共4个小飞轮)、平台拓展板、计算机板、姿态测量板、U/V接收机、VHF天线、离轨帆。其中离轨帆通过3个M3螺钉安装于卫星结构平台外部。
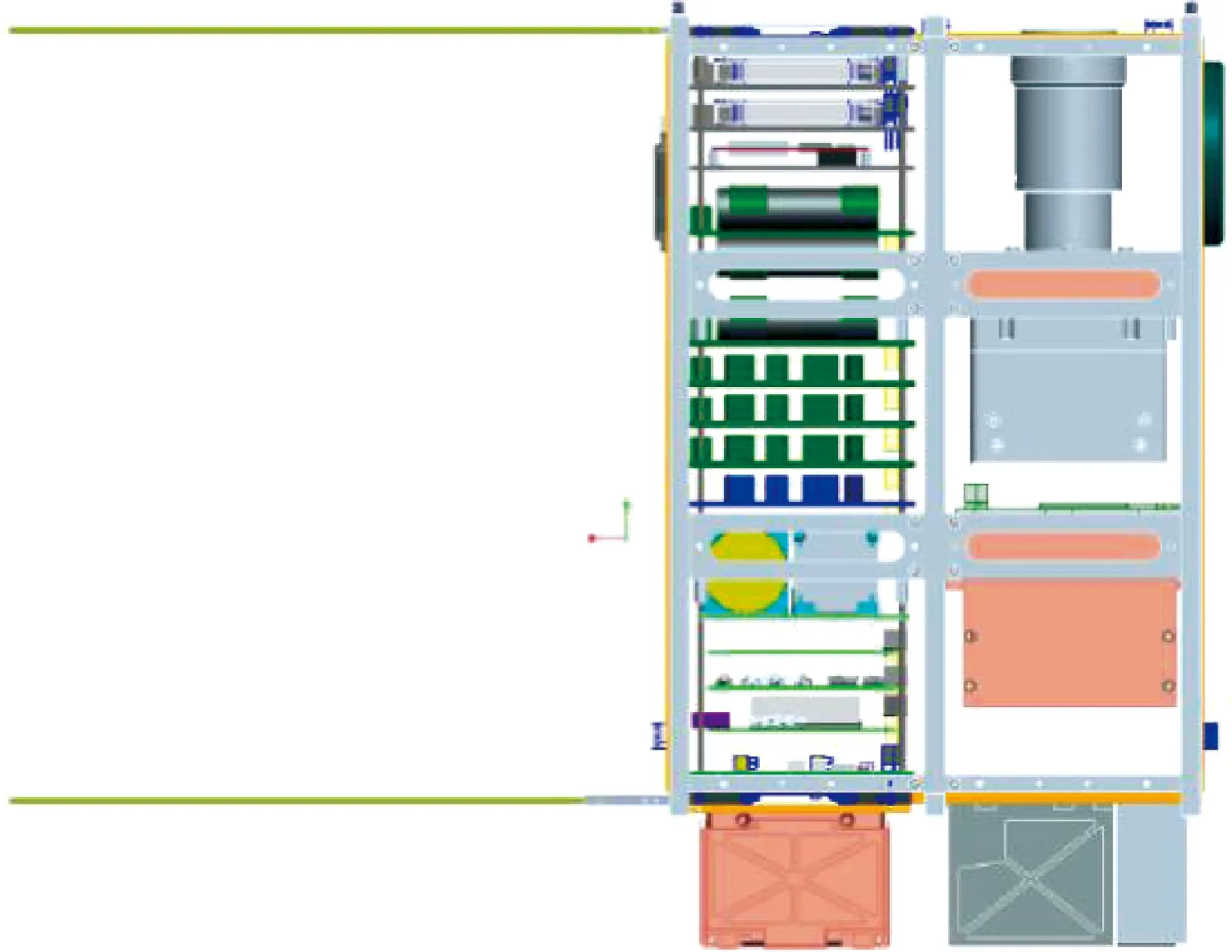
图2 6U立方星的布局图Fig.2 Layout of a 6U CubeSat
右侧为载荷部分,以BY- 03星为例,由上至下分别为:紫外相机(对天)、载荷编程板、X波段接收机,计算光谱相机和X波段天线并排放置。其中,紫外相机、载荷编程板和X波段接收机安装于平台内部,计算光谱相机和X波段天线安装于平台外部。
结构系统的主要参数如下:
1)标准6U结构包络:226.3 mm×100 mm×340.5 mm;
2)标准6U框架质量:<900 g;
卫星帆板在轨展开如图3所示。

图3 6U立方星的太阳帆板在轨展开状态图Fig.3 Solar panels of a 6U CubeSat unfolding in orbit
2 测控数传一体的模块化设计
本节主要考虑在有限的地面站资源和星上资源约条件下,立方星测控数传一体的模块化设计方法,提高6U立方星测控可靠性以及数传速率。
2.1 星地资源约条件下的测控数传可见性分析
受到能量和体积的约,传统立方星通常采用UHF/VHF业余无线电频段进行星地测控和数据通讯。其优点是UHF/VHF是全向天线,而且能耗较低。这种方式仅仅适用于简单的卫星任务,首先是受电磁环境干扰影响大,其次是数据传输速率低,不能满足大容量图像数据传输的要求。如果单独采用S/X波段测控,则要求在卫星的对天面和对地面都安装测控天线,同时增加微波网络。因而,增加了测控分系统的复杂性,同时对能量的消耗也显著增加。
此外,受到地面站可用资源的影响,目前很多立方星只采用少量的地面站实施测控和数传任务。因此,对于卫星星地一体化测控与数传的任务设计需要统筹考虑卫星星上资源和地面站资源的约。
图4为只配置了一套对地面的测控数传天线时,卫星处于对日定向模式下的天线波角覆盖示意图。从图4中可以看出,当卫星尚未建立稳定姿态时,只在一个方向配置测控天线,则存在较大的测控盲区。此外,当卫星处于对日定向模式下,即使卫星过顶,也不能够保证卫星天线与地面站建立稳定的链接关系。
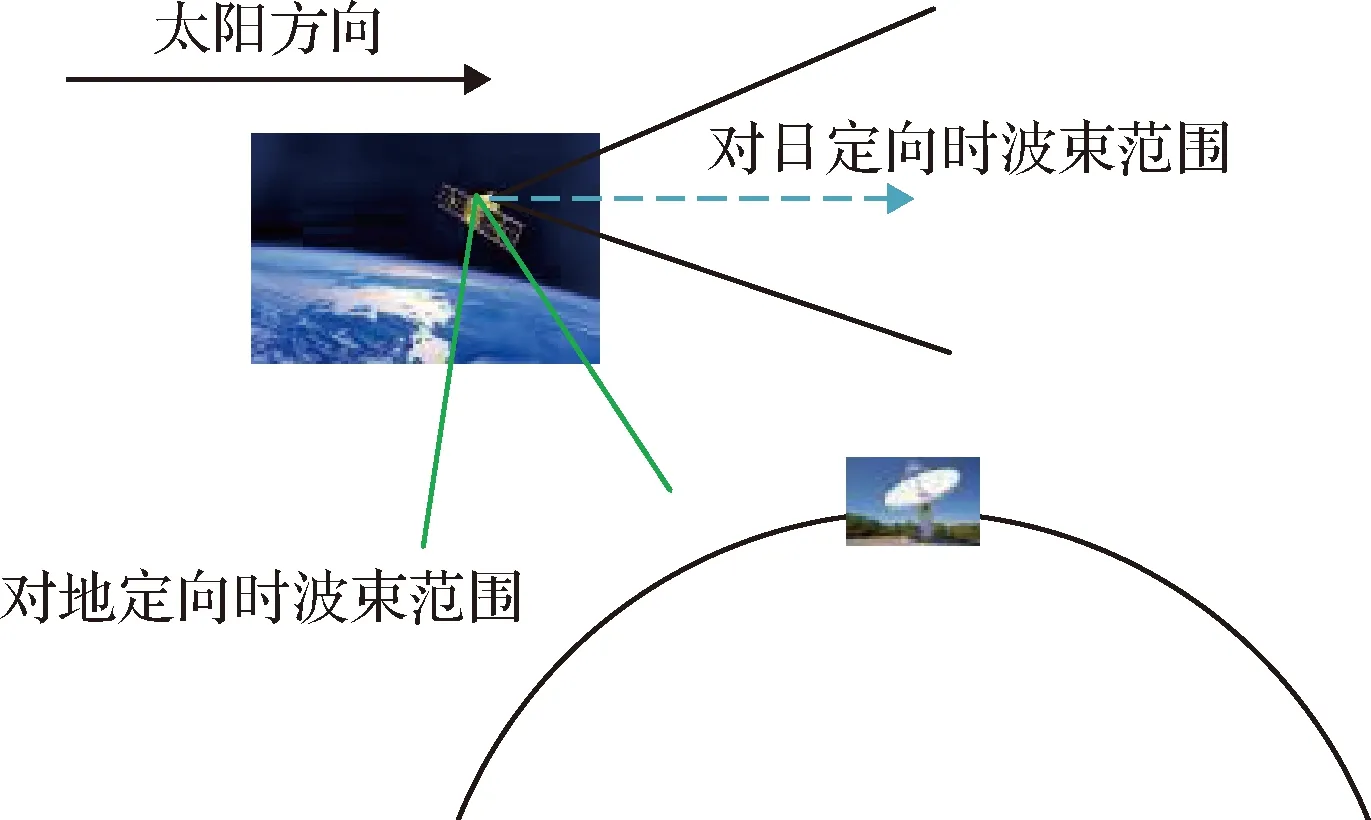
图4 微带天线波覆盖范围Fig.4 Beam coverage of a microstrip antenna
因此,考虑到立方星本身能量有限的约条件,本文提出了一种基于UHF/VHF+X频段测控数传一体化的卫星测控与数传方法。6U立方星配置了一套UHF/VHF天线,用于常态化测控,一直向地面广播卫星遥测信息,并且接收地面指令。此外,还配置了一套X波段测控数传一体机,能够在测控模式和数传模式进行工作状态的切换,实现批量指令的上注。
2.2 UHF/VHF测控系统
星上UHF/VHF测控系统一方面实时向地面广播星上遥测数据,另一方面通过VHF天线接收地面发送的遥控指令。
VHF天线接收到的地面指令的有效性受到卫星姿态和电磁频谱干扰影响比较大。因此,为了提高系统的可靠性,在地面只通过VHF频段给卫星发送简单的指令,如各单机设备的开关机指令。而卫星的程控指令块,则通过X波段遥控通道上注。
UHF/VHF测控分系统的结构如图5所示,包括测控应答机,UHF天线和VHF天线。通常2U,3U立方星会将UHF和VHF放置在一起,两个天线展开后呈现180°分布。如图2所示,将UHF天线和VHF天线分别布置在左侧卫星平台的上下部分,一方面解决了天线与太阳帆板位置干涉的问题;另一方面,使得卫星平台的单机尽量布置在左侧,满足立方星模块化组装的要求。
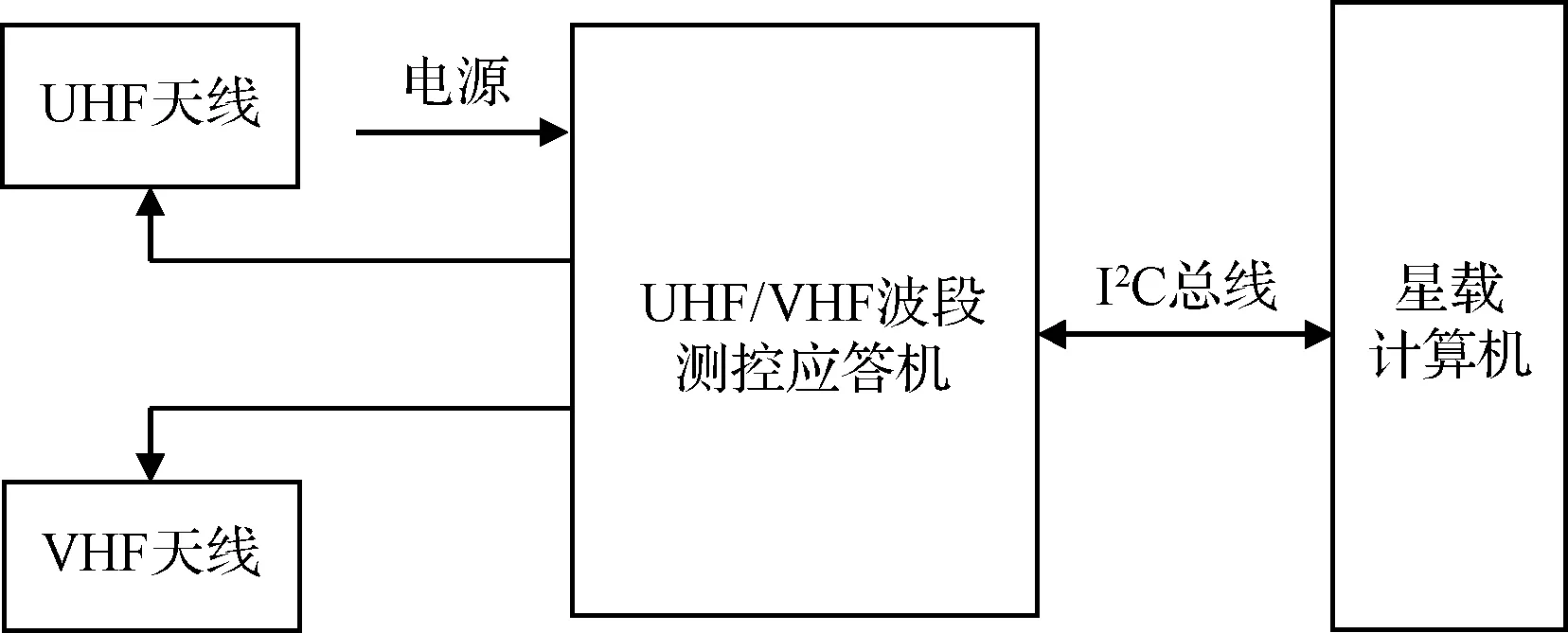
图5 UHF/VHF测控分系统Fig.5 UHF/VHF TT&C subsystem
2.3 X频段测控数传一体的模块化设计
采用X频段进行测控可以有效克服环境电磁频谱干扰,大大降低UV频段对地面接收站的选址要求,提高测控系统的可靠性。考虑到立方星体积、功耗的限制,为在尽量小的物理空间内提高测控的可靠性,提高数据传输的速率,本文提出使用X频段测控数传一体机的方案。测控数传一体机可以实现测控功能和数传功能的自由切换。
测控数传一体机的主要特点如下:
(1) 兼具测控功能和数传功能,共用一套通信机和发送天线,通过通信机工作模式选择可以实现在测控模式和数传模式间切换;
(2)测控模式的主要作用是在卫星处于姿态稳定阶段,接收地面站发送的上行指令块,另外,作为建立稳态姿态情况下的备份测控通道;
(3) 数传模式的主要作用是通过LVDS总线接收光学载荷数据并存储于内部固存中,当卫星过境时下传图像数据,数据速率可以达到10 Mbps,远高于采用UV频段下传数据的速率;
(4)测控功能和数传功能要分时使用。
6U立方星,通过X波段测控数传一体化设计,提高了在稳定姿态期间的测控可靠性,相比于单纯使用UHF/VHF频段进行测控,有利于指令数据块上注,以及批量图像数据的下传。
X波段测控数传一体机的系统框图如图6所示。
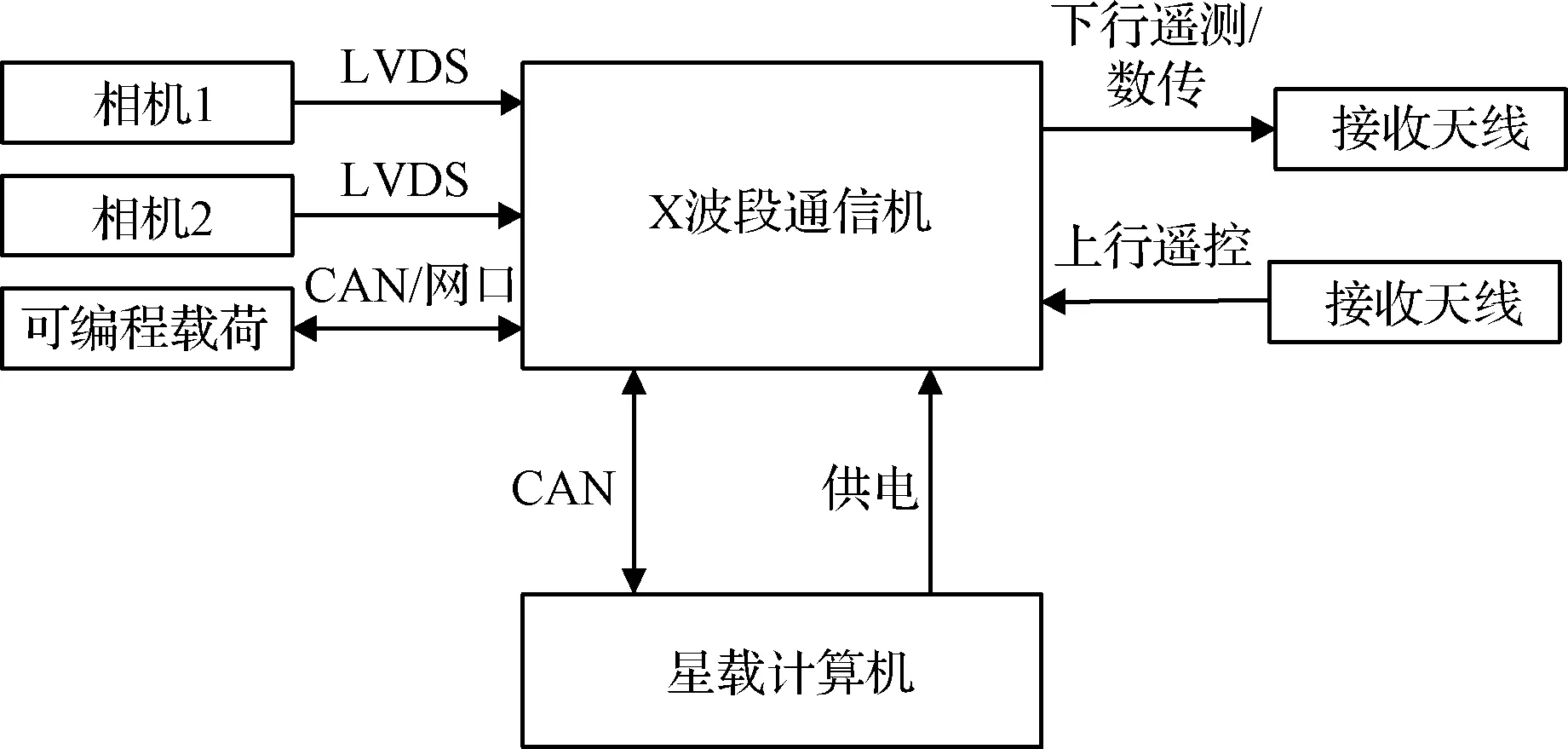
图6 X波段测控数传一体机系统框图Fig.6 Block diagram of the integrated system of X-band TT&C and data transmission
3 6U立方星电源分系统的模块化设计
受到可展开太阳帆板面积的约,能量不足是立方星的常见问题,少数立方星采用了多折太阳帆板的方案,一定程度上缓解了能量不足。本文分析了立方星能源平衡需求对整星工作模式的影响,设计了适应于多种任务的电源分系统模块化设计方案。
3.1 6U立方星能源平衡需求分析
受到星上能源的约,立方星的各种模式必须进行优化,以维持整星能源平衡。首先,卫星入轨以后,长期处于对日定向工作模式,短期处于载荷工作模式进行科学任务探测以及进行数传测控;其次,当卫星经过地面站时,对载荷数据进行下传。
为了便于6U立方星在标准化的6U立方星分离机构中安装,在6U立方星的两侧安装太阳能帆板,在轨展开,卫星在光照期姿态对日定向,按照太阳辐射强度1353 W/m2,太阳电池阵转换效率不小于30%。两片展开太阳翼总面积约为0.15 m2,寿命末期输出功率不小于35 W。
根据不同工作模式下的单机工作功耗情况,可以分别统计出速率阻尼模式、对日定向模式、对地定向模式、载荷工作模式、测控数传模式和安全模式下的卫星总功耗。在卫星轨道确定的条件下,卫星的载荷工作模式和测控数传模式决定了卫星对能源的需求。为实现立方星的快速模块化组装,在太阳电池阵面积确定的条件下,需要对蓄电池组的容量和大小进行适配性选择。
3.2 电源分系统的模块化设计
为了满足6U立方星快速化模块组装的要求,立方星的电源分系统需要按照功能进行模块化设计,以适应不同载荷工作任务的需求。
电源分系统由太阳电池阵、锂离子蓄电池组和电源控制器组成。6U立方星能源传输如图7所示。
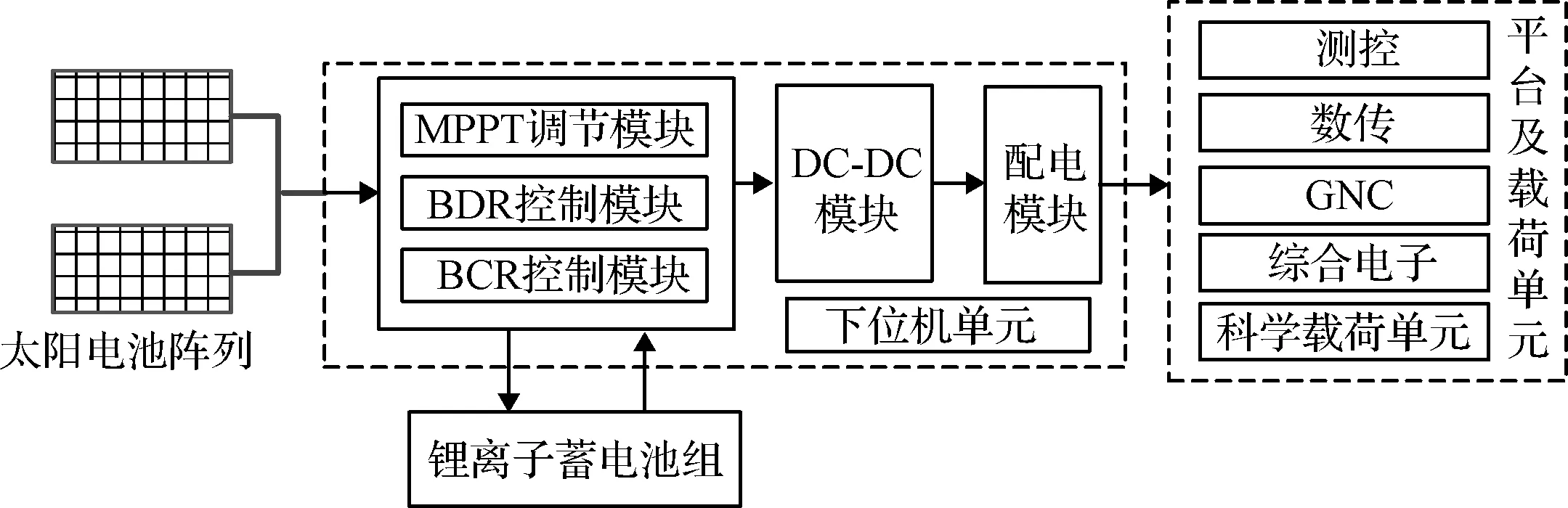
图7 能源传输框图Fig.7 Energy transmission diagram
电源分系统的各组件需要满足立方星设计的标准,其中,电源控制器:包络空间小于0.6U,质量不大于0.6 kg;蓄电池组:包络空间小于0.8U,质量不大于0.9 kg;太阳电池阵列:有两块展开太阳翼,质量不大于1.3 kg。
(1) 太阳电池阵
受到整星结构尺寸的影响,太阳电池阵的面积大小是确定的,可以作为6U立方星的标准配置,方便立方星的快速组装。太阳电池阵由结构与机构部分和电池电路部分组成,电池电路部分设计采用高效三结砷化镓太阳电池作为发电单元,在光照期通过母线对星上有效载荷及服务系统供电,并对蓄电池组进行充电。结构与机构为太阳电池提供安装环境,主要包括基板、压紧释放机构和展开机构。
太阳电池阵串联数目:
(1)
太阳电池阵并联数目:
(2)
式中:Vbus为光照期母线电压上限值;Vline为太阳阵供电线缆压降;Vmin为太阳电池最大功率点的最小输出电压;Psa为太阳电池阵输出功率;Pm为标准条件下太阳电池最大功率;a=0.05为功率设计裕度。
卫星采用两块太阳翼,每一个太阳翼采用12串4并电池电路,整星共需要布12串8并电池电路,使用单体电池96片。
(2) 蓄电池组
蓄电池组采用高比能量、低成本且具有多次、长期在轨飞行经验的18650单体电池。单体电池参数为:工作电压3~4.2 V;额定容量3.2 A·h;单体重量48.5 g;具备过充、过放、过流和短路保护。
蓄电池串联数目为:
(3)
式中:V0为单体电池电压。
蓄电池组的容量为:
(4)
式中:W为蓄电池组输出的能量;VEOL为蓄电池组寿命末期单体电池的平均放电电压;d为蓄电池组放电深度。
蓄电池并联数目:
(5)
式中:CR为电池容量;Ss为单串电池数目。
蓄电池组采用4串3并结构,同时,三组蓄电池分别配置一路温度传感器,为保证蓄电池组工作温度,利用加热膜对电池组施加温控管理,加热总功率约为2.5 W。
(3) 电源控制器
电源控制器负责功率调节和电池组的充、放电管理以及整星配电管理,保证星上设备正常工作。电源控制器采用最大功率点跟踪控制策略来提升能量转换效率[19],具有技术成熟、集成度高、工作可靠等优点。电源控制器也采用模块化设计思想,由光伏转换单元、二次电源转换单元、配电单元、下位机及信号测量单元等组成,其原理如图8所示。
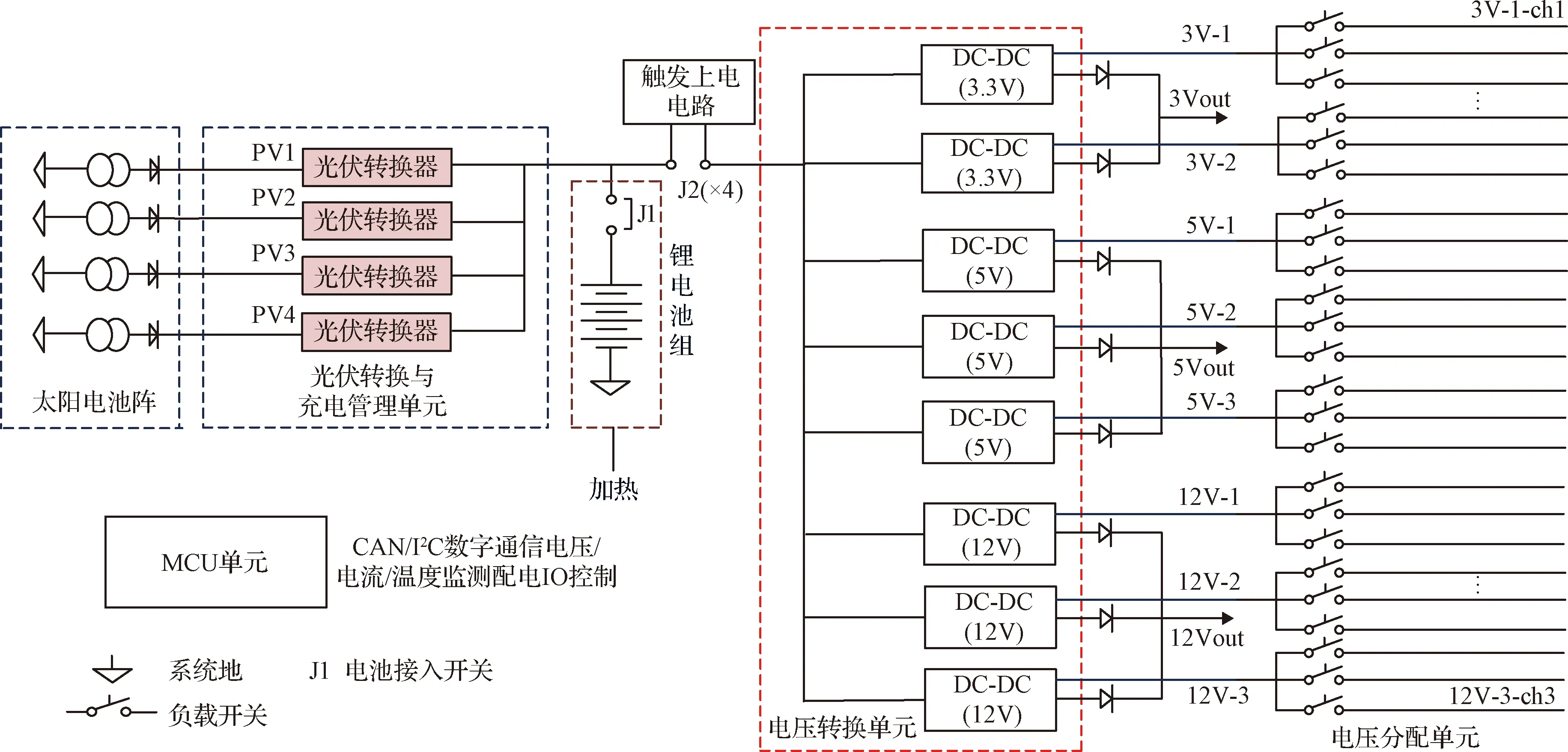
图8 电源控制器原理框图Fig.8 Principle diagram of the power controller
4 姿控分系统的模块化设计
姿态控制分系统需要保证卫星常态化对日定向,根据任务要求调整姿态进行拍照和数传。
卫星姿控分系统组成如图9所示。卫星平台使用的敏感器包括模拟式太阳敏感器3套、磁强计 2套、陀螺2套、GNSS系统1套。
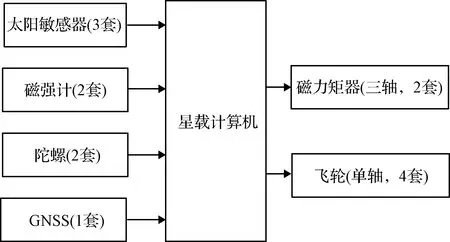
图9 姿态控制系统组成Fig.9 Components of the attitude control system
卫星平台使用的执行机构包括磁力矩器、飞轮。其中,三轴磁力矩器2套,用于消旋、粗对日定向与飞轮卸载;单轴飞轮4套,用于对日定向三轴稳定控制和对地定向三轴稳定控制。
卫星姿控分系统的部组件均采用模块化设计的思想,其中MEMS陀螺和磁强计集成在一块PCB上;4套飞轮采用三正交一斜装的方式,三轴磁力矩器集成于一体,均能满足立方星部组件标准的结构尺寸要求。
因此,通过PC104接插件,能够将陀螺磁强计组件、飞轮组件、磁力矩器组件和GNSS组件等整合在一起,形成一个标准的立方星姿态测量与姿态控制模块,方便与立方星平台其他系统的快速组装。
将6U立方星作为刚体,可得到其姿态动力学方程为:
(6)
考虑默认3-1-2旋转顺序,得到小角度假设情况下卫星的姿态运动方程为:
ωe+Mdωoi
(7)
即可得到欧拉角描述下的误差动力学方程如下:
(8)
式中:Tm为磁力矩器产生的控制力矩。
初始消旋阶段采用了常规的B-Dot控制器。
B-Dot控制器利用磁力矩器在每个轴上输出一个控制力矩,这个控制力矩的符号与该轴上磁场强度的变化率相反,用来降低卫星的转动能量。
磁力矩器控制力矩如下:
(9)

在三轴稳定模式下,姿态控制律采用PD控制,即
(10)
式中:kp和kd分别为比例、微分系数。
5 离轨帆的模块化设计
卫星工作寿命到期后,尽快脱离轨道坠入大气层是保障太空安全、和平利用太空资源的国际共识。因此,近地轨道微小卫星在获取发射许可前都需要提供可靠的离轨方案。对于立方星这类微小卫星,采用推力器离轨的方式,代价较大;而采用离轨帆的方式,通过卫星寿命末期展开离轨帆,能够增大卫星的面质比,加速轨道衰减。
本文将离轨帆设计为一个约0.5U的尺寸包络,作为一个标准化的模块,安装在卫星的顶部。离轨帆装置采用了一种轴承卷尺形式,主要由帆板、驱动组件、储舱组件、释放组件、热刀及帆膜等组件构成。由于安装离轨帆装置的一侧受到相机物理空间干扰无法展开,因此,在设计离轨帆时,只考虑展开其中的三个面,总共展开面积为0.75 m2,如图10所示。
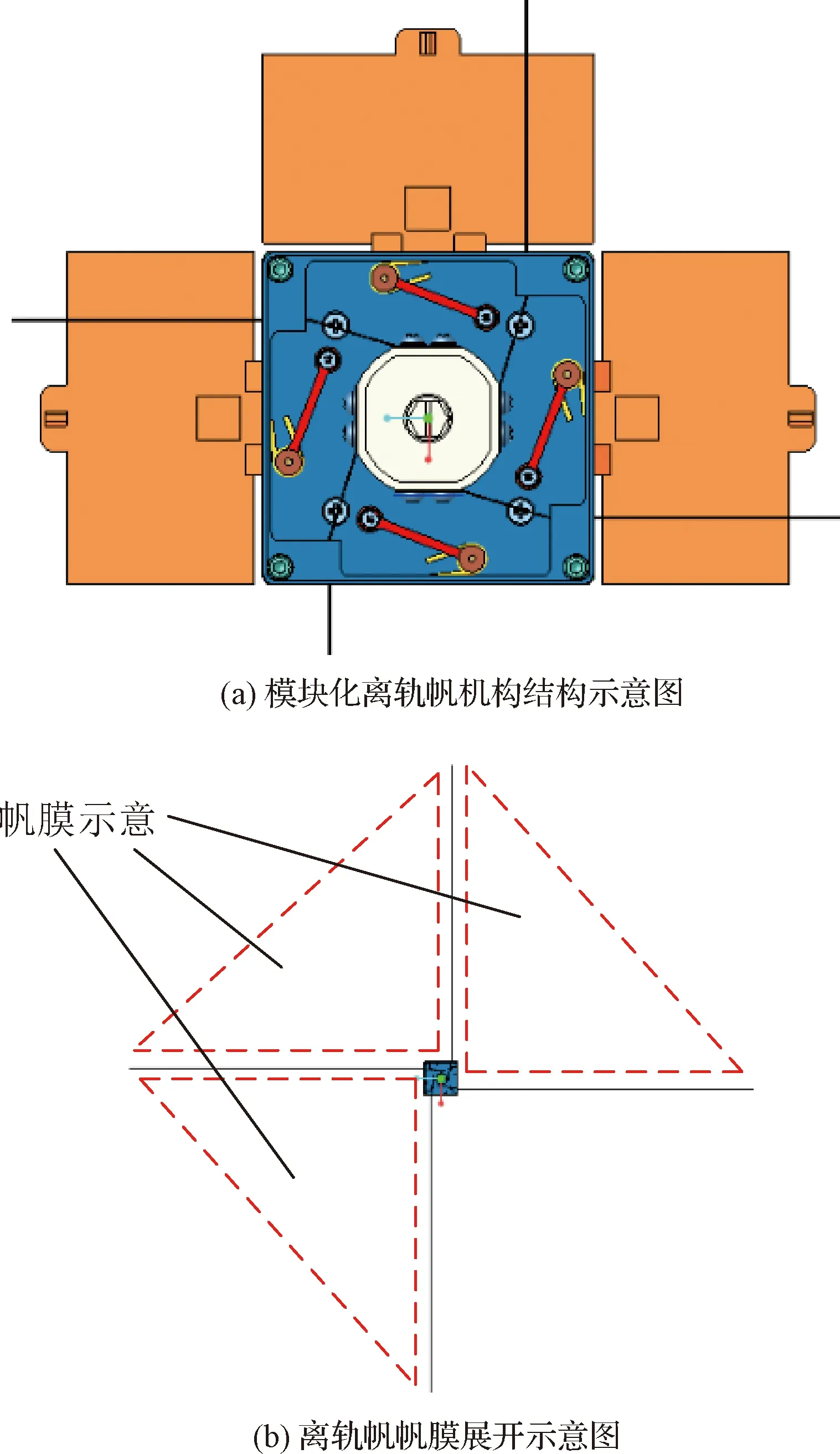
图10 离轨帆展开示意图Fig.10 Deployed deorbit sail
考虑卫星轨道按照97.277°倾角,轨道高度按照475 km,大气模型分别取Harris-Priester,CIRA 1972和NRLMSISE 2000,经计算,在无变轨维轨情况下,对应三种不同大气模型,卫星轨道寿命约为4.2年、3.2年和3.4年。卫星运行一年之后,选取离轨帆受阻面积为0.75 m2的情况下,卫星经过136天之后可离轨。离轨时间相比于不配置离轨帆时,缩短了至少80%。
6 在轨验证情况
本文提出的模块组装6U立方星总体设计方法应用于中国青少年科普卫星工程BY- 03卫星,于2020年11月6日搭载长征六号运载火箭在太原成功发射,运行于轨道高度为475 km的太阳同步轨道。
6.1 平台与载荷的模块化组装
将6U立方星的左侧设计为卫星平台部分,右侧用于安装卫星的有效载荷。这一设计使得卫星平台部分可以作为一种公共的通用化平台,能够适配多种标准化载荷,满足卫星模块组装的要求。
BY- 03星搭载了一台紫外天文相机、一台计算光谱相机和一台可编程教育载荷,开展地球和宇宙天体遥感观测,以及天地协同编程教育实验。
(1)紫外天文相机
紫外天文相机波段范围270~300 nm,为了避免光照区的阳光干扰,紫外相机选择在地影区成像。相机采用CMOS面阵成像,成像帧频为1 fps,成像区域为天区目标,需要卫星根据轨道等因素,设置目标区域的姿态角度。相机8bit量化,像元数2048×2048,图像无压缩,图像数据量小于35 Mbps。包络尺寸为85.54 mm(L)×83 mm(B)×184.35 mm(H)。相机质量为2 kg,功耗小于8 W。
(2)计算光谱相机
计算光谱相机用于对地观测,波段范围450~650 nm,相机在光照区成像,通过地面系统进行数据反演,得到不少于15个光谱信息。相机采用CMOS面阵成像,成像帧频为1 fps。计算光谱相机8 bit量化,图像无压缩,图像数据量小于12.5 Mbps。包络尺寸为96 mm(L)×80 mm(B)×61.5 mm(H)。相机质量为300 g,功耗小于2 W。
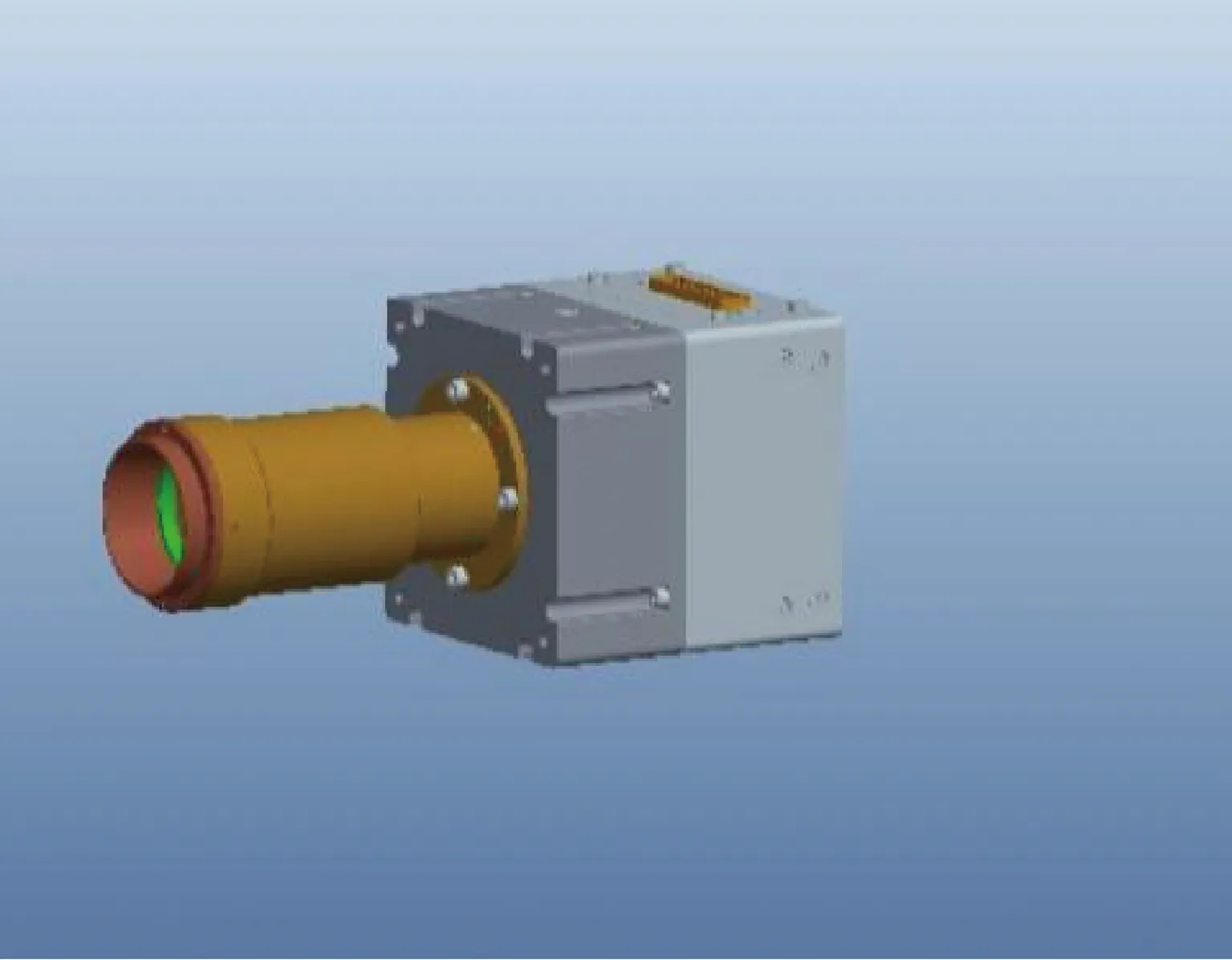
图11 紫外天文相机结构图Fig.11 Structure of the ultraviolet camera
(3)可编程计算载荷
可编程计算载荷实现梦想声音的征集发送,卫星平台遥测数据请求,以及其他数据上下行通信。可编程载荷主要由中央控制器和通信接口组成,主要面向青少年开展以航天专业技术为主题的python编程教育任务。
上述三个载荷都满足立方星的通用尺寸标准和电气接口标准,作为可配置的部组件,布置在立方星的右侧,从而实现立方星的模块化快速组装。
6.2 BY- 03卫星总体技术参数
运行轨道:轨道高度为475 km太阳同步轨道。
发射质量:≤11.5 kg(其中卫星平台9.5 kg,分离机构2 kg)。
测控频段:UV频段+X波段测控。
UV频段:下行码速率1200~9600 bps,上行码速率1200 bps。
X频段采用UXB体制:下行码速率4096 bps,上行码速率4000 bps。卫星采用X测控和数传一体化设计,共用射频通道,调制方式为QPSK,信道编码为RS+卷积,数传码速率10 Mbps。
BY- 03卫星的实物如图12所示。
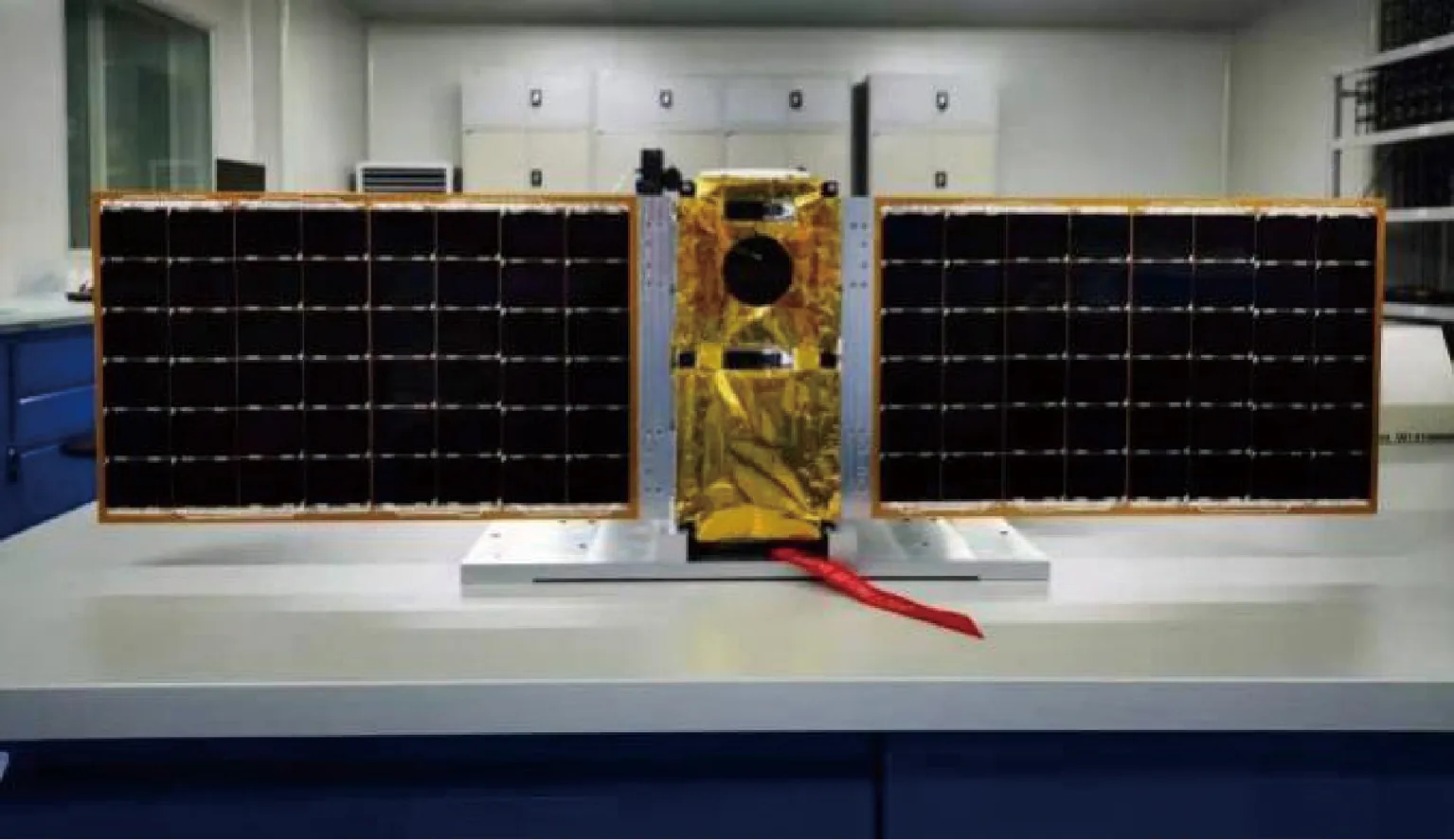
图12 八一03标准化6U立方星Fig.12 Standardized BY- 03 6U CubeSat
6.3 电源系统在轨状态
BY- 03卫星于2020年11月6日11时41分成功分离、整星上电,太阳翼12时11分顺利展开,卫星天地链路12时54分成功首次建立测控链路后,电源系统部分遥测数据如图13(a)~(d)所示。
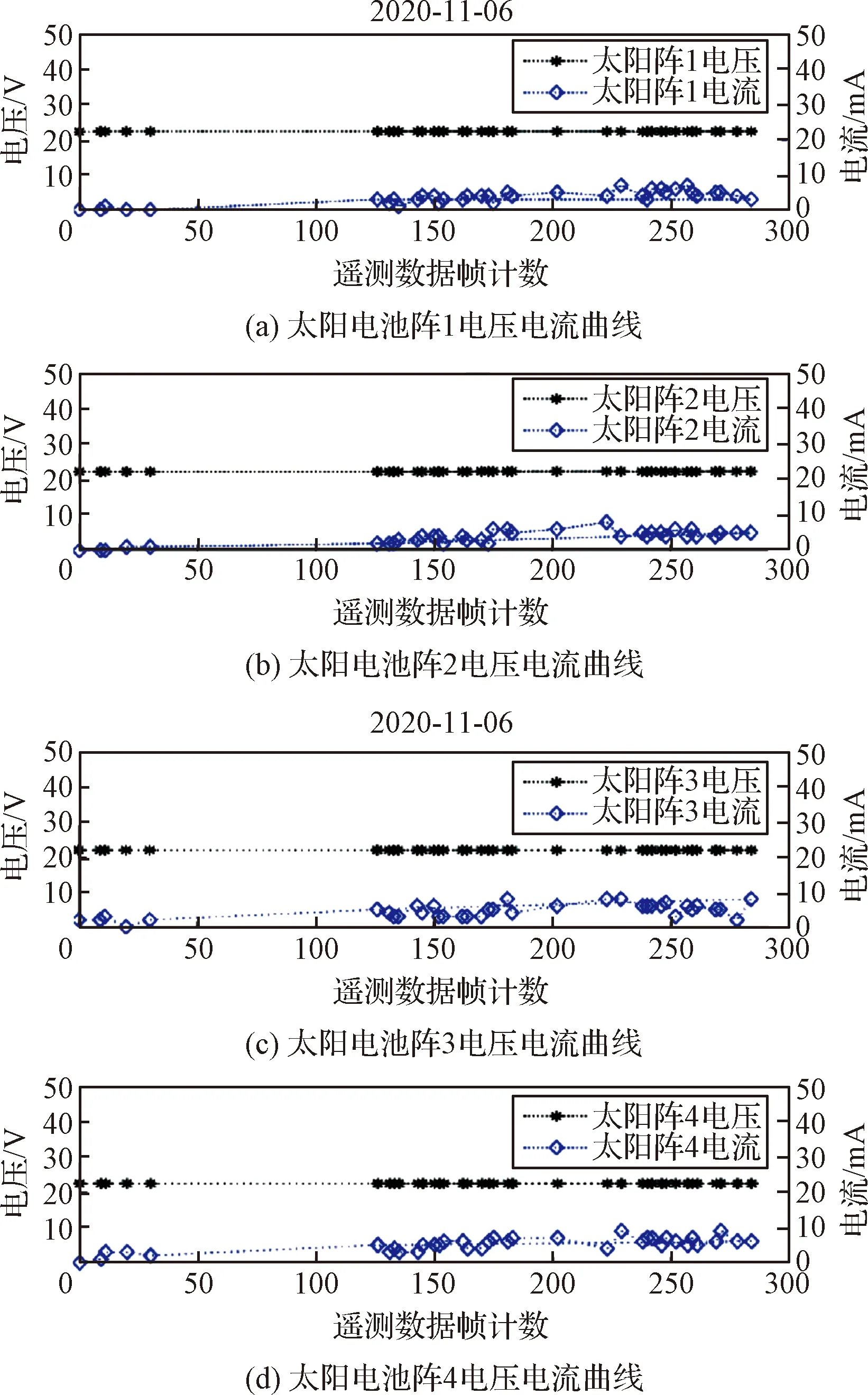
图13 太阳电池阵遥测参数Fig.13 Telemetry data of the electrical power system
对遥测数据分析可知:
(1) 四路太阳电池阵工作电压为22.4 V、22.3 V、22.1 V、22.4 V,与理论值22.56 V基本一致;每一路太阳电池阵输出电流均在0~100 mA之间变化,此时处于消旋阶段,太阳电池阵没有处于对日状态,因此输出电流尚未达到设计最大值(0.4 A)。通过电压电流数据可以判断,太阳电池阵工作正常。
(2) 系统母线电压(即蓄电池电压)为16.3 V,说明电源系统的蓄电池在发射场交付后到发射之间的长期存放容量几乎没有衰减,入轨工作正常。
(3) 整星消耗总电流约为稳态280 mA,瞬态450 mA(UV下传数据时),由于消旋阶段太阳阵转换功率不足,蓄电池处于放电状态补充系统所需功率,放电电流为80~400 mA之间。
(4) 二次电压模块工作3.3 V、5 V、12 V均正常,开关状态正确。
(5) 电源控制器温度分别为:MCU板28 ℃、二次电源模块板24 ℃;电池组21 ℃、24 ℃、26 ℃。温度均在正常范围内。
6.4 BY- 03卫星在轨工作模式与姿态控制情况
卫星自星箭分离之后,一次进入消旋、粗定姿、对日定向、对地定向等工作姿态。下面给出对日定向模式下的姿态控制情况结果。
如图14所示,分别为对日定向模式下,卫星三轴角速度测量值以及太阳方向角在遥测时间段内的输出。时间为11月7日2时57分4秒(UTC)- 3时1分12秒(UTC),横坐标为星上时间秒值去掉整数天后的秒值。
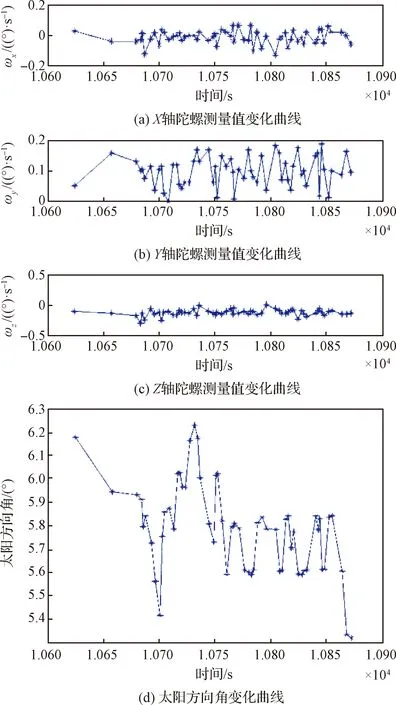
图14 对日定向模式下的卫星姿态数据Fig.14 Satellite attitude data in a sun pointing mode
卫星工作在光照区,完成轨道确定和姿态确定。卫星姿态误差在2°以下,角速度0.2(°)/s以下。此时磁力矩器进行飞轮卸载,对姿态有一定影响。
6.5 测控数传与载荷在轨测试情况
BY- 03星采用UHF/VHF频段+X频段测控模式,其中X频段通信机为测控数传一体化设计,根据工作任务需求,在测控模式和数传模式之间切换。
为比较地面电磁环境对UV测控的影响,利用西安UV地面站和中卫UV地面站对BY- 03的业余无线电频段进行了比较。测试结果表明,当中卫站和西安站同时处于UV测控弧段时,中卫站接收到的遥测信号帧数要明显多于西安站。在相同的测控弧段内,中卫站接收到的有效遥测帧数大于70%,而西安站接收的遥测帧数一般不超过30%。一方面,受到周围高层建筑遮挡,另一方面西安无线电电磁频谱干扰影响大。
通过UV频段上行指令,西安站和中卫站均能够多次正确上行指令,并且实现对卫星单机的开关机操作。在程序指令块上行方面,X频段上行则有较好的成功率,能够顺利完成一周内的载荷工作计划指令上注。
BY- 03 6U立方星搭载了紫外天文相机、计算光谱相机和可编程计算载荷三个主要载荷,通过在轨测试,均正常工作。拍摄的序列图像,在卫星通过西安数传站时,由X波段数传天线下传,数传速率达到了10 Mbps。验证了采用X波段测控数传一体方式,能够在功耗和数传能力约下,实现较大批量数据的快速下传,相比于传统使用UHF/VHF模式下传数据的立方星,数据传输能力得到了较大提升。
7 结 论
本文提出了一种模块组装6U立方星总体设计方法。通过将卫星平台和应用载荷分区布局,能够实现卫星平台和载荷的松耦合设计,适应不同载荷任务需求。提出了6U立方星测控数传分系统、电源系统、姿控分系统、离轨帆的模块化设计方法,实现了6U立方星平台的快速集成以及与标准化载荷的快速化模块组装。在体积和功耗约条件下,提高了测控系统的可靠性,X频段数传速度可达10 Mbps,标准化离轨帆能够将6U立方星从475 km轨道高度上的离轨时间缩短约80%。通过中国青少年科普卫星BY- 03星在轨测试,验证了模块组装6U立方星总体设计的可行性,其能够作为一种标准化低成本快速研制微纳卫星平台,适应小型光学遥感载荷工程应用的需求。