中国航天运输系统智能飞行技术发展展望
2023-04-15吴燕生
吴燕生
(中国航天科技集团有限公司,北京 100048)
0 引 言
当前,新一轮科技革命和产业变革加速演进,航天系统工程是开放的复杂巨系统,具有系统复杂、技术密集、风险性大、研制周期长等特点,使之成为最具挑战性和广泛带动性的高科技领域之一,在全球发展中的战略地位愈发突出,成为国家战略竞争的制高点。进入新时代以来,载人航天、月球探测、火星探测、北斗导航等航天重大工程连战连捷,持续推动航天强国建设,以长征系列火箭为代表的航天运输系统是支撑上述工程成功实施的基础。
随着世界主要航天大国和主体加速太空经济与军事发展,进出空间需求日益提升[1-3],2021年全球航天总发射次数达到146次,2022年持续增长达到186次,均超出1967年“冷战”期间创下的139次的发射记录。为了满足日益增长的发射需求,世界航天运输领域逐渐由“解决如何高可靠进入空间”转变为“解决如何高效、可靠、低成本进出空间”,持续推动航天运输系统向更优性能、更低成本、更高质量方向加速发展。其中,高质量是支撑航天运输系统实现预定任务的前提[4]。
为实现航天运输系统高质量发展[5],在产品设计方面,通过“总体裕度-系统冗余-单机强化”三层级可靠性设计方法提升可靠性,构筑运载火箭“良好基因”;在产品质量管控方面,坚持“源头抓起、过程控制、零缺陷”的质量管理理念,创新质量管理方法,从精细到精益,持续发展航天质量管理体系,使用“技术、产品、操作、管理”四维度风险分析方法系统全面地进行风险辨识,从“测试、验收、检验、工艺、人员”五个环节确保产品的过程质量控制。
尽管如此,要想在接近产品本质可靠性极限的情况下提升火箭飞行可靠性,需通过技术创新本质提升航天运输系统执行任务的可靠性,转变传统基于偏差包络的总体设计方法与理念,突破并应用智能飞行技术,实现智能技术与航天运输领域的深度融合,支撑航天运输系统实现更高质量发展。本文梳理总结了智能飞行发展历程和趋势,制定了适合中国的航天运输系统智能飞行技术发展架构,以指导后续技术研究与发展。
1 航天运输系统智能飞行技术定义
综合当前国内外对智慧火箭的研究[6]和火箭专业技术划分,总结定义航天运输系统智能飞行技术为:航天运载器自身在飞行过程中实时感知与监测机体内部状态和外部信息,基于实时能力边界实现自主评估与决策,利用本体和外部资源开展执行与处置,适应复杂任务剖面,并持续学习与进化的技术。该技术包括智能感知与监测、智能评估与决策、智能执行与处置三个核心功能。
1.1 智能感知与监测
感知是获取知识的前提,丰富且可靠的感知是评估决策与执行处置的基础。智能感知与监测是通过合理布置智能传感设备,依靠智能感知获取飞行器动力、结构、器件、动力学等内部状态和外部气流、引力、空间碎片障碍物等多元信息,依靠智能算法对信息进行有效提取与处理,实现飞行过程中的状态智能监测。
1.2 智能评估与决策
智能评估与决策是基于系统感知与监测结果,通过特性分析、风险以及剩余能力评估实现对当前飞行器状态的精准智能评估,进而考虑复合约实现任务层级的重新规划与决策,是实现传统火箭从“成败”型向“成败+性能”型升级的关键环节。
1.3 智能执行与处置
智能执行与处置是指飞行器在接收评估与决策输出指令后,利用本体算法软件和物理执行机构与外部在轨服务飞行器等资源开展执行与处置,以改变飞行器状态,完成飞行任务,是实现智能飞行的最后一个环节。
2 智能飞行技术发展历程与趋势
2.1 发展历程与趋势
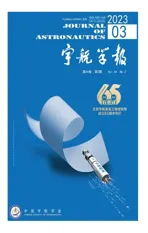
智能飞行技术与运载火箭总体设计技术发展相辅相成,结合运载火箭总体设计技术发展历程和趋势[7],可将智能飞行技术发展分为四个阶段,见图1。
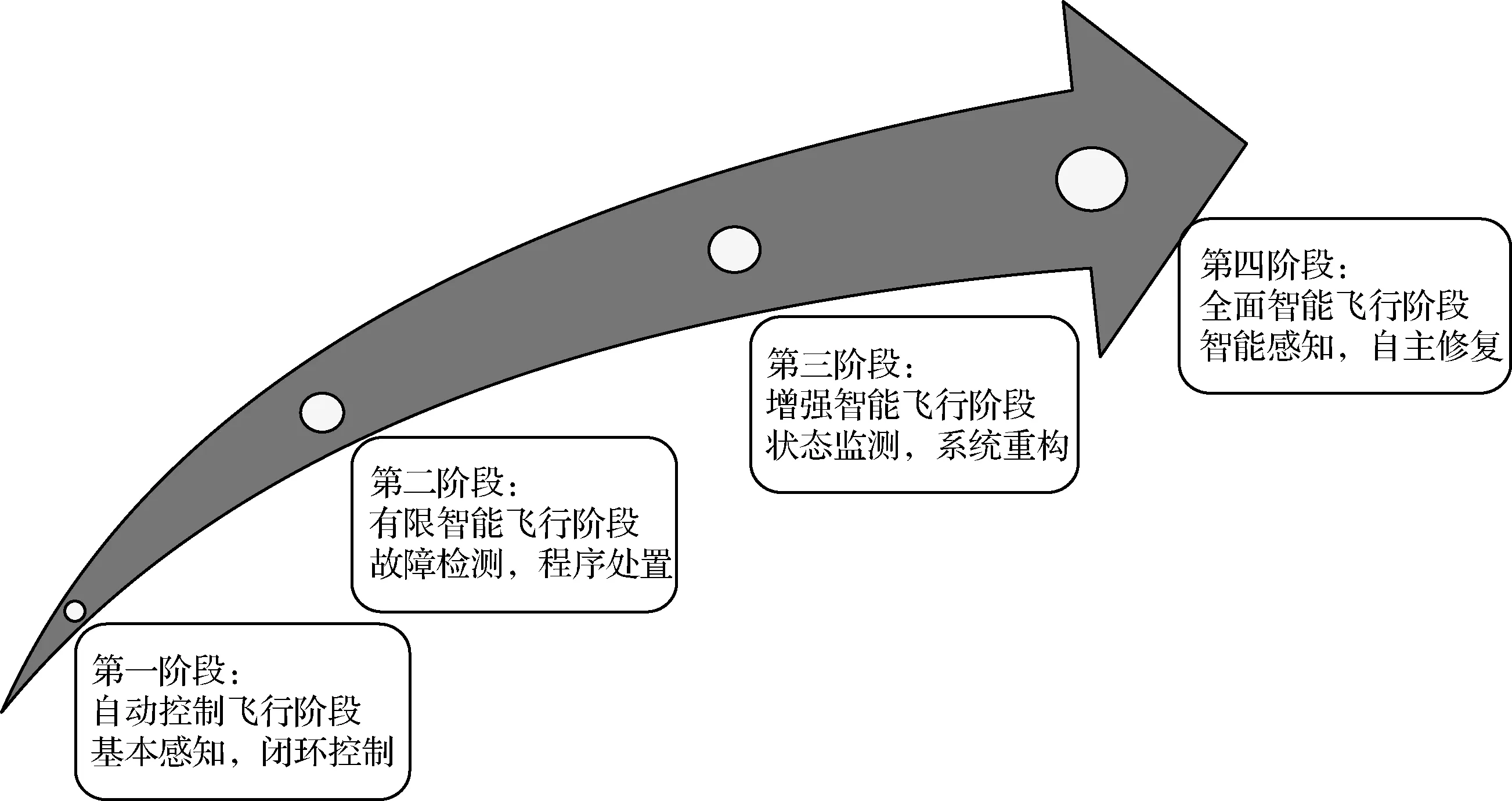
图1 智能飞行技术发展四个阶段Fig.1 Four stages of intelligent flight technology development
(1)自动控制飞行阶段
该阶段运载火箭具备基本的感知能力,仅可依靠误差反馈实现闭环控制,并被动适应各种飞行工况,尚不具备对关键单机、系统的在线故障检测能力。核心特征为基本感知、闭环控制。
国外典型代表为早期的土星IB火箭,如图2所示,其一级布局8台H-1发动机,但火箭能力实质上是按照7台发动机设计的。当出现发动机故障时,依靠能力裕度被动适应动力故障。该阶段对应中国运载火箭研制发展初期,型号全箭可靠性依赖于系统、单机产品可靠性保证;基于各项设计偏差,通过线性叠加、均方根叠加等方式形成极限设计包络,当故障影响在极限包络范围内,火箭可有效适应;反之,则依靠系统裕度被动适应。火箭整体可靠性受制于产品可靠性和偏差包络。典型火箭代表包括长征二号丙、长征三号甲、长征二号E等火箭,该时代研制的火箭满足了中国航天活动从无到有历史阶段。

图2 土星IB火箭一级发动机布局[8]Fig.2 Layout of the engines on the first stage of the Saturn IB[8]
(2)有限智能飞行阶段
该阶段运载火箭感知能力扩展,具备了典型故障检测能力,能够通过离线设计的程序策略开展处置,有效提升了火箭针对典型故障的处置适应能力。该阶段仅可检测是否有故障,无法诊断故障类型和程度,且尚不具备全箭跨系统重构能力。核心特征为故障检测、程序处置。
国外典型代表为美国德尔塔4运载火箭,在发动机出现故障时可依赖控制系统完成处置。2012年德尔塔4火箭发射第三颗GPS-2F卫星过程中,末级RL-10发动机发生故障出现推力下降,控制系统通过惯性器件敏感到过载变化,依靠迭代制导更新飞行轨迹,使火箭充分利用剩余燃料完成预定任务。
中国成功研制的第一型载人运载火箭长征二号F,标志着中国运载火箭智能飞行技术进入该阶段。长征二号F在研制中采用提升全箭载荷裕度、箭机主从冗余、单机极限寿命试验为代表的“总体裕度-系统冗余-单机强化”三层级可靠性设计方法提升可靠性,具备了典型故障的适应能力。此后,中国现役各类型运载火箭均据此方法进行可靠性设计,能有效适应系统内重要单机的一度故障,具备了一定的容错能力。同时首次在火箭上设置故障检测系统,通过总结火箭故障与飞行动力学参数的映射关系,形成“过载+姿态”的故障检测参数和“极限偏差仿真+典型故障遍历仿真”的故障判据制定方法,覆盖所有需要逃逸的故障模式,具备了判断是否发生致命性故障的能力;制定了覆盖5个高度范围、3种气动外形组合的全剖面逃逸策略,在发生致命故障情况下,实现了在生理承受能力、逃逸飞行器结构完整、落区安全性等多约条件下的航天员安全逃逸。上述成果使飞行可靠性从传统火箭的0.91提高到0.97,安全性达到0.99,保证了中国15次载人火箭发射任务全部圆满成功。
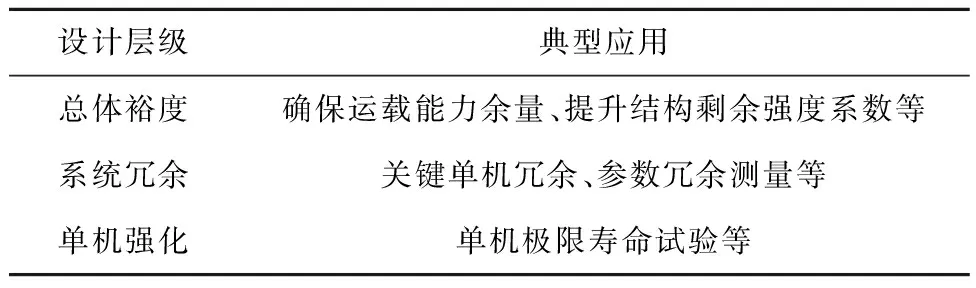
表1 三层级可靠性设计方法Table 1 Three-tier reliability design method
(3)增强智能飞行阶段
随着现代控制理论与电子技术的发展,增强智能飞行阶段的航天运输器具备对关键单机、系统的感知和状态监测能力,可以诊断全箭、系统、单机的已知有限故障类型和程度,具备基本的评估决策能力,可以通过系统重构提升飞行适应包络。该阶段核心特征为状态监测、系统重构。
国外典型代表为美国的航天飞机、太空发射系统以及猎鹰9火箭。该三型火箭均设计了故障诊断系统,飞行时进行状态监测主动诊断故障,并采取处置措施。太空发射系统设计了“三台发动机工作点”,在该时间点后,可主动关停一台故障发动机,通过切换制导策略,尽可能进入预定轨道;对于载人任务,将通过在线评估入轨能力后,利用剩余能力及“猎户座”载人飞船的推进能力,进入一条安全轨道。猎鹰9火箭具备飞行90 s前损失一台发动机、90 s之后损失两台发动机仍可完成飞行任务的能力。2020年3月猎鹰9火箭一次飞行任务中,箭上故障诊断系统主动关停了故障发动机,依靠故障诊断和任务重规划技术,完成了主飞行任务。不过上升段提前消耗了回收时减速所需要的推进剂,使得未能成功回收一子级火箭。通过垂直起降回收的火箭天然具备动力冗余能力,所以猎鹰9火箭对于上升段动力故障适应能力极强[9],这是带翼回收模式所不具备的优势。
中国对该阶段的关键技术进行了初步探索与应用,长征三号乙运载火箭成功验证并应用了末修发动机与姿控喷管的极性故障辨识与控制重构技术[10];在故障诊断、任务重规划技术方面,中国在长征二号丙火箭上开展了相应的飞行搭载验证,通过飞行动力学参数实现了飞行过程中的每一台发动机的故障诊断,并根据火箭当前飞行速度和位置以及剩余燃料,在线评估推力下降故障后的剩余入轨能力,完成了任务重规划技术的初步验证[11],如图3所示。
图3 长征二号丙火箭飞行搭载验证剖面[11]Fig.3 Profile of the flight carrying demonstration of the CZ-2C[11]
中国将通过研制新一代载人运载火箭迈入该阶段。通过转变设计理念,在总体设计阶段面向典型故障开展了故障容错和重构设计,设置故障诊断与处置系统,对发动机等关键产品实现了健康监测,应用在线任务重规划和控制重构技术,降低故障影响,大幅提升全箭智能飞行水平。
(4)全面智能飞行阶段
面向未来大规模进出空间、探索空间和开发空间的任务需求,航天运输系统将发展到航班化阶段[12],年总飞行次数达到千次量级,形成体系化能力和规模化产业,完全重复使用、智能飞行将成为航天运输系统的基本技术特征。
该阶段航天运输系统将有效融合人工智能技术,建立全生命周期、全系统的智能健康监测系统,实现火箭本体自主修复,具备交互式学习能力,可以通过多智能体天地协同学习、多智能体的协同重构能力,自主适应环境和本体状态变化,具备不确定性故障适应能力。
2.2 差距分析
经过半个多世纪的发展,中国航天运输系统主力长征系列运载火箭具备了发射低、中、高不同轨道、不同有效载荷的能力,在智能飞行方面开展了初步探索,对标国际航天运输系统智能飞行技术发展情况,主要在三个方面存在不足:
1)智能飞行技术体系尚不完备,攻关力量相对分散。当前中国尚无明确的智能飞行技术体系,无法对中国航天运输系统智能飞行发展与应用形成指导,导致各专业系统攻关力量相对分散,未形成有效合力集智攻关。
2)适用于复杂飞行剖面的智能自主决策算法等基础理论整体较为薄弱。以运载火箭为代表的航天运输领域飞行器飞行剖面复杂,参数变化剧烈,运载火箭飞行高度从地表至真空,大气密度等外部环境参数和自身模型特性参数急剧变化,非线性特征显著;同时,由于系统复杂,部组件众多,仅结构系统的部组件就超过数万个,导致故障失效模式复杂。因此,如何在复杂场景中利用有限信息进行有效分析与决策,是智能飞行技术突破所面临的关键难题,其中所需要的有限计算资源下智能自主决策算法等基础理论研究较为薄弱。
3)智能飞行技术对航天运载器总体顶层设计影响分析欠缺,总体顶层研制准则与设计流程尚需完善。智能飞行技术的变革与突破将有效推动运载火箭总体设计理念和模式的转变。中国长征二号F载人火箭研制时建立了包括飞行可靠性、安全性完整的设计准则,使中国迈入智能飞行第二阶段。当前第三阶段智能飞行技术不断突破与发展,其对运载火箭总体设计顶层准则的影响分析还不够成熟,还需持续完善相应的研制准则与设计流程,以更好地提升总体设计水平。
3 中国航天运输系统智能飞行技术发展架构
针对中国在智能飞行领域的差距不足,基于“发展第三阶段,探索第四阶段”的基本原则,制定中国航天运输系统智能飞行技术架构,见图4,构建由“感知与监测-评估与决策-执行与处置”组成的功能层,据此进一步细化了实现层,梳理了关键技术群和基础理论。
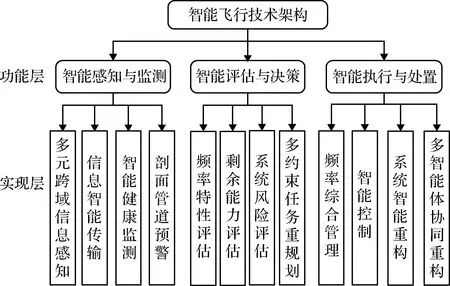
图4 中国航天运输系统智能飞行技术架构图Fig.4 Intelligent flight technology architecture of China’s space transportation system
3.1 智能感知与监测功能
智能感知与监测主要包括多元跨域信息感知、信息智能传输、智能健康监测等关键技术。
(1)多元跨域信息感知
在传统的过载、角度、压力、温度、电压等传感器基础上,具备多元跨域信息感知能力。一方面丰富信息感知的种类,研制应用气流传感器等大气测量装置,研究分布式光纤应变传感器,实时获得全箭攻角、载荷、模态以及外界大气密度、温度等多元信息;另一方面突破跨域信息感知技术,除了飞行器自身传感器感知数据以外,连通互联网星座、空间环境监测平台,实时获取飞行剖面、空间环境等数据监测,为其他技术与功能模块提供基础信息。
(2)信息智能传输
针对以往1553总线传输中站点数、通信距离、传输速度等方面受限问题,目前在研的实时以太网、光纤总线等技术,虽然解决了传输带宽和传输距离等问题,但是电缆安装等限制仍无法适应智能感知末端大幅增长的需求,突破LED可见光无线通信、无线通信携能等技术,搭建无线智能传输网络,以无线传感器为端节点,以智能信息调度模块为中枢,全面提升全箭信息交换的数据带宽和应用灵活性,为智能飞行技术要求的大数据感知、传输、计算等需求提供基础支撑,见图5。
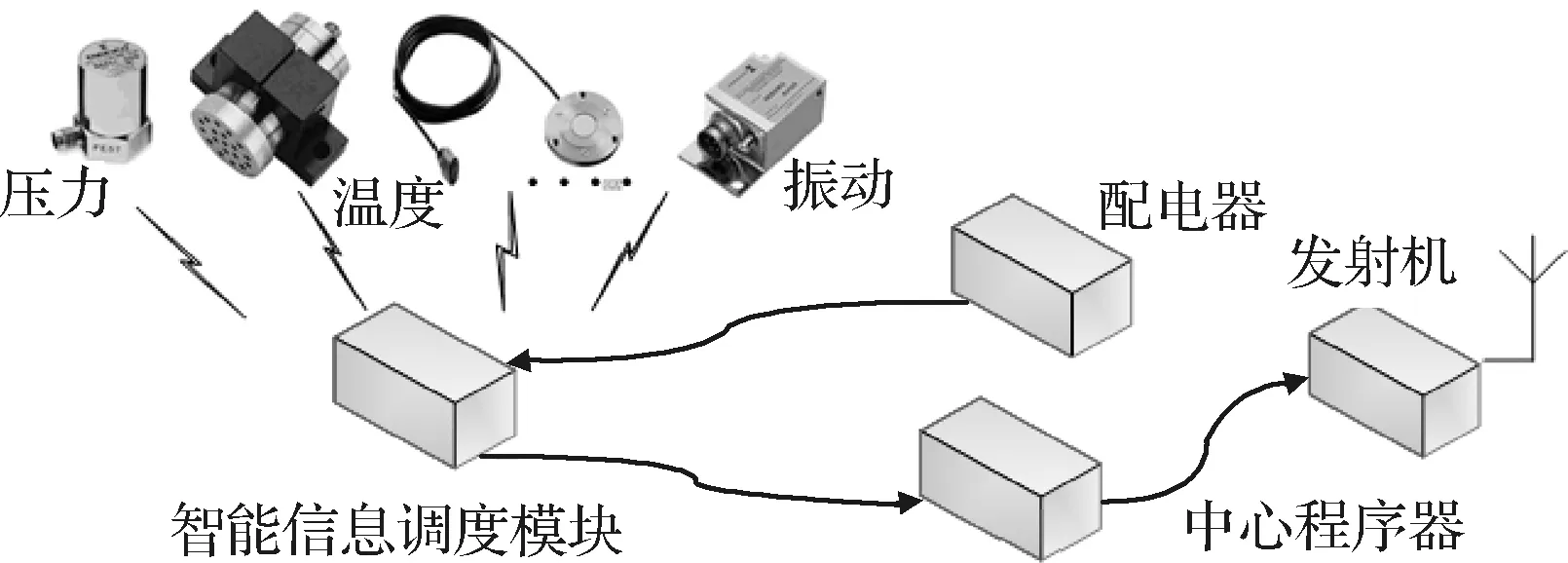
图5 无线传感网络方案示意图Fig.5 Wireless sensor network scheme
(3)智能健康监测
运载火箭属于强耦合、高动态的复杂系统,状态空间复杂,故障后传播和系统演变机理复杂,一方面导致状态监测难度增加,另一方面也为我们由不同参数、不同系统对状态进行联合确认提供了可能。通过研究基于多元信息融合的智能健康监测技术,融合力、热、电、动力学等多元信息,实现从单一要素感知向组合要素智能感知的转变,见图6。同时研究基于信号处理、解析模型、知识的多种诊断方法,实现多类多维度信息、多方法联合监测确认,可降低误诊率和漏诊率,本质提升健康监测的可靠性和准确性;通过深度学习等智能算法实现对火箭状态发展的趋势预测,将为在传播失效速度在秒级的“快故障”的有效处置提供有效解决方案。
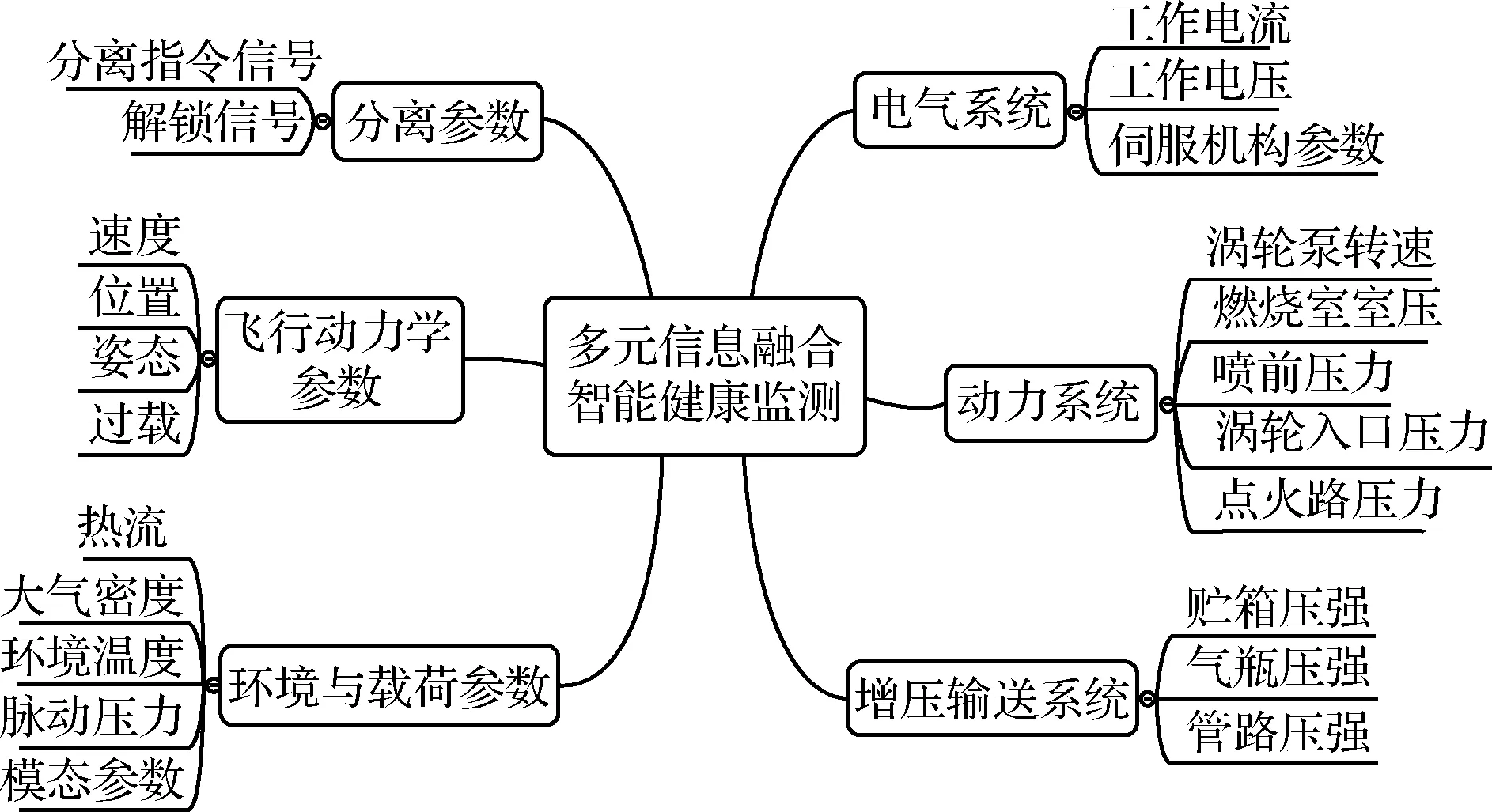
图6 多元信息融合智能健康监测Fig.6 Multi-information fusion of the intelligent health monitoring
(4)剖面管道预警
未来近地轨道空间基础设施建设将持续推进,航天发射频次将呈几何级数增加,航班化的航天运输系统需突破空间环境跨域感知技术,通过天地协同实时监测管道内异常气象、空间碎片等环境信息,为箭上智能评估与决策提供基础的环境预警信息。
3.2 智能评估与决策功能
智能评估与决策主要包括频率特性评估、剩余能力评估、系统风险评估等关键技术。
(1)频率特性评估
运载火箭系统复杂,频率管理问题格外重要,在全箭光纤应变传感器等感知信息基础上,研究羽流光谱分析、深度学习等先进技术,实现对发动机、箭体结构等关键产品的模态频率快速提取分离,在线评估频率耦合情况,为频率综合管理提供基础。
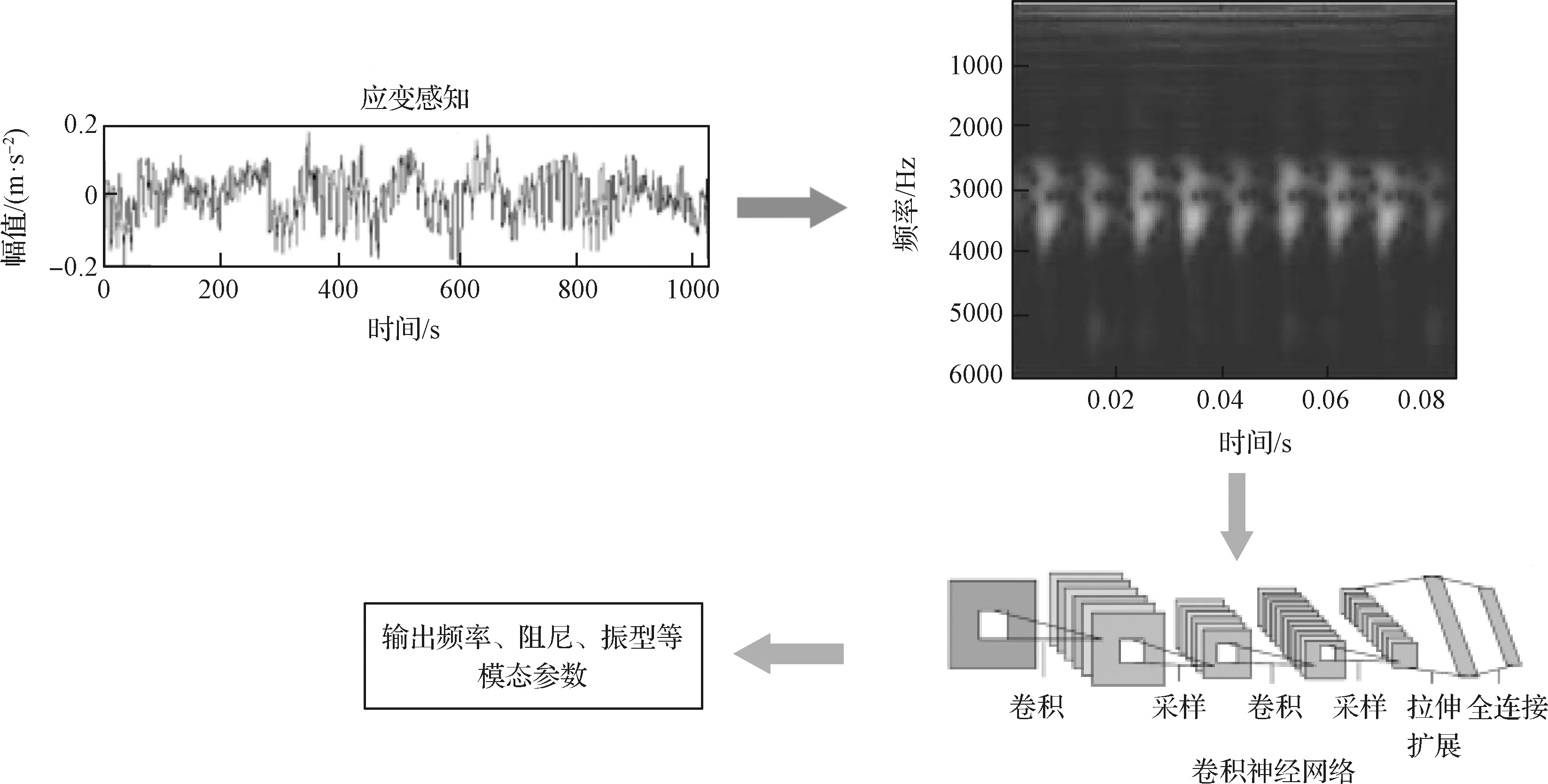
图7 基于卷积神经网络的模态提取技术Fig.7 Modal extraction technique based on the convolutional neural network
(2)剩余能力评估
当运载火箭出现故障时,需要对两个核心能力进行评估,一是质心运动层面的运载能力,二是绕质心运动层面的姿态控制能力。
在剩余运载能力评估方面,依据剩余液位信息在线评估最大可用能量,依据全箭状态信息实现入轨运载能力的量化评估,为任务重规划决策提供基础支撑。在姿控能力评估方面,由于飞行器故障系统状态偏离标称状态较大,需对姿控系统的剩余控制能力、状态可达范围、最大扰动适应能力、系统稳定裕度进行量化评价,突破基于不变集理论的输入受限收敛区间估计、基于状态有界的受限系统扰动抑制等基础理论,为控制重构提供基础支撑。
(3)系统风险评估
飞行过程中,不论是正常还是故障工况,都需要在健康监测的基础上实时智能评估动力、结构等系统运行风险,并进行状态风险预测,保证在非标称飞行剖面下动力、结构等系统状态正常,风险可控。
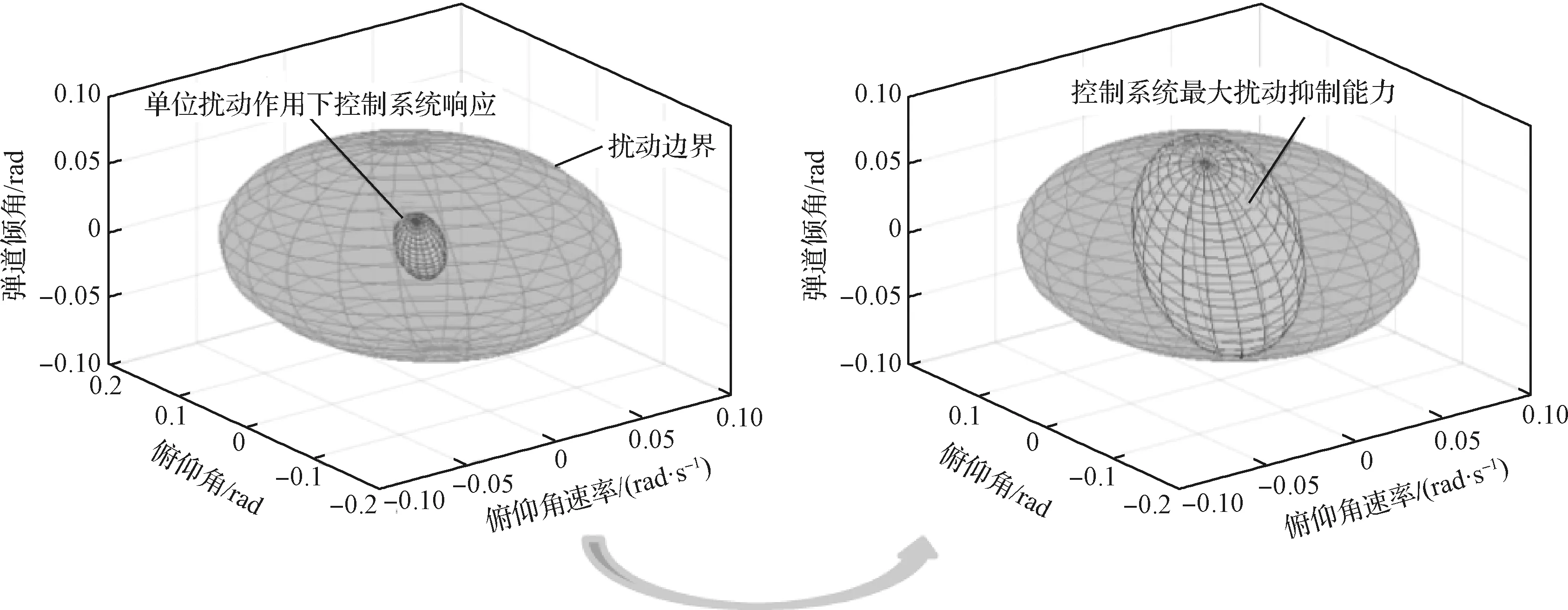
图8 控制系统最大扰动抑制能力评估Fig.8 Evaluation of maximum disturbance suppression capability of the control systems
(4)多约任务重规划
出现故障后,运载火箭依据剩余能力评估结果,考虑飞行载荷约、落区约等限制条件,规划可达的最优目标轨道和过程飞行轨迹,解决故障后火箭飞到哪的问题。该项技术涉及可用于飞行箭载终端的快速智能优化算法、最优控制等基础理论研究。
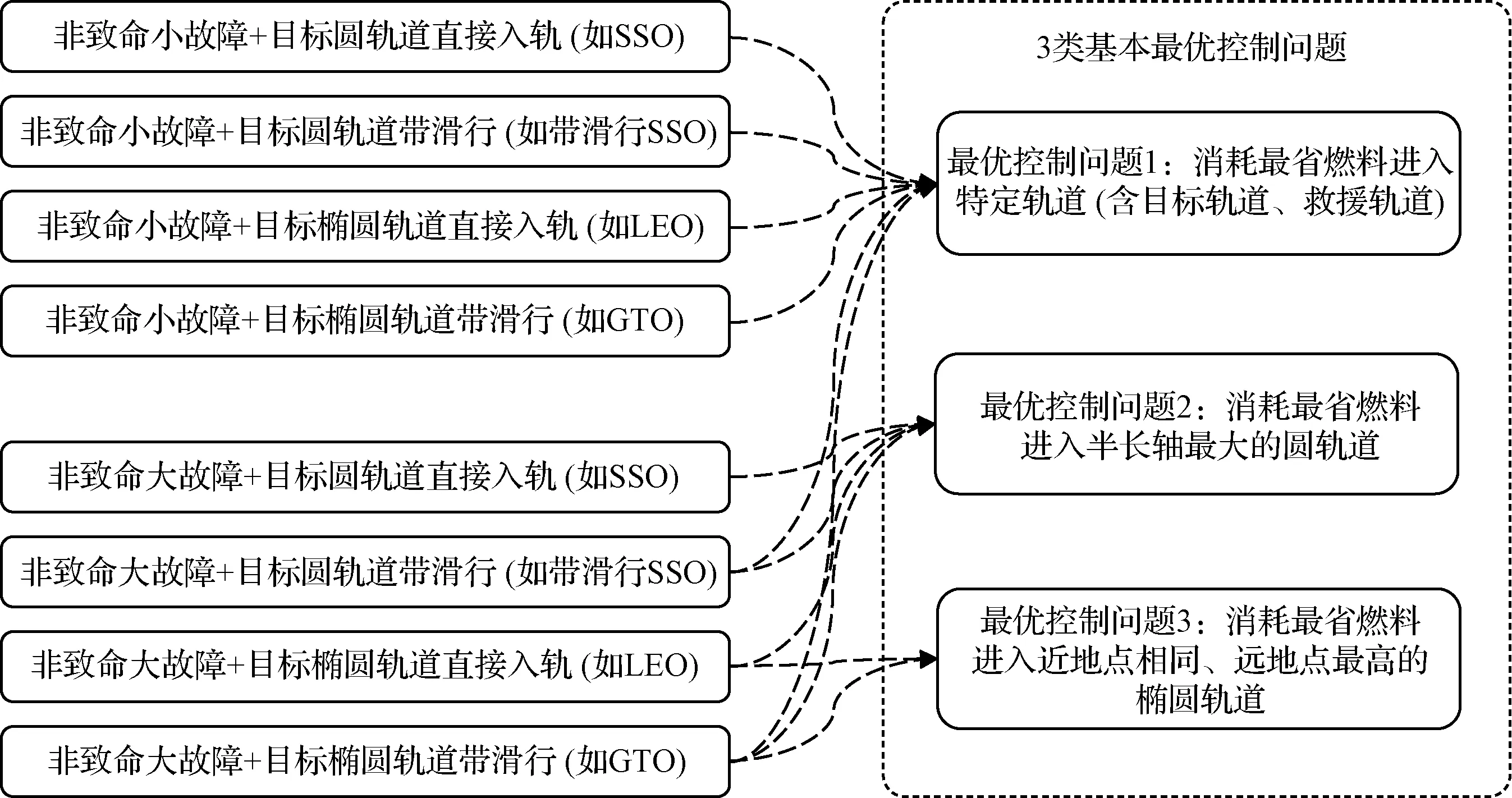
图9 火箭任务重规划对应的最优控制问题Fig.9 Optimal control problems for the rocket mission reprogramming
3.3 智能执行与处置功能
智能执行与处置主要包括频率综合管理、控制智能重构和多智能体协同重构等。
(1)频率综合管理
通过频率特性评估结果,确定频率耦合类型,智能采用相应频率管理措施。对于结构-控制频率耦合问题,突破箭上自适应陷波滤波技术,衰减异常频率,阻断频率耦合通路;对于结构-动力频率耦合问题,突破动力系统频率自适应调节技术,实现能量吸收及错频处置。
(2)智能控制
研究自适应控制、参数辨识等基础控制理论,突破大长细比火箭弹性自适应控制、神经网络容错控制、扰动自适应补偿控制、控制指令智能分配、控制参数在线智能调节、自适应制导、故障火箭刚晃弹稳定控制等关键技术,使火箭正常飞行时具备对外部扰动在线估计与补偿、飞行状态关键参数智能辨识等能力,提升控制品质与剖面适应性;并具备故障工况时控制系统的制导、姿控系统自适应重构能力,保证运载火箭的质心和绕质心运动控制的精确性和稳定性。
(3)系统智能重构
研究运载火箭电气、动力等系统智能重构技术。正常飞行时实现电气系统单机功耗智能管理技术,实现功率智能变频调节,优化全箭电气能源管理;电气系统单机出现故障时,在单机通用化基础上,优化重构电气系统数据流结构,确定该模式下的最优重构目标单机,通过系统迁移技术,在正常的目标单机上部署并运行故障单机的功能软件,利用软件定义硬件功能实现电气系统智能重构,确保系统功能正常。故障后动力系统除了进行简单关机处置外,研究突破其内部隔离与组件重构技术,一方面提升其正常工况下的可靠性和故障后安全性,另一方面实现动力系统内部的自重构,丰富动力系统故障处置手段。
(4)多智能体协同重构
突破多智能体在轨智能交互、载荷移交技术,实现多智能体协同任务重构。故障飞行器执行目标降轨后处于停泊轨道稳定运行,此时在轨服务飞行器可变轨机动至故障飞行器,依据故障飞行器健康状态,可实施在轨补加使故障飞行器继续完成任务。若故障飞行器已不具备任务执行能力,则可通过在轨对接载荷移交技术,由在轨服务飞行器继续完成任务,将任务执行主体由个体转变为多智能体,通过协同重构实现任务可靠性的跨越式提升。
4 智能飞行技术对总体设计影响
智能飞行技术将有效提升中国航天运输系统飞行可靠性,增强航天运载器对偏差、故障和环境的适应性,其对航天运载器总体顶层设计准则、流程均有一定影响。现阶段中国运载火箭总体设计遵循极限偏差包络设计准则,基本内容为在基准任务剖面基础上,综合考虑偏离各系统标称性能指标的3σ偏差限,通过偏差组合拉偏拓展任务剖面,并据此完成总体、系统以及单机的具体设计。为了实现智能飞行技术应用,需完善以运载火箭为代表的航天运输系统设计准则:在开展具体方案设计前,首先梳理各层级典型故障,随后各层级针对典型故障开展设计;面向典型故障开展方案设计应适当缩小设计偏差限λσ,以兼顾性能损失、经济成本以及周期约。两种设计准则的比较见图10。
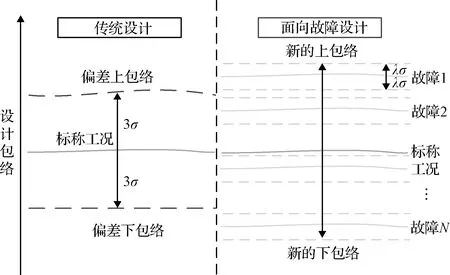
图10 两种设计准则的比较Fig.10 Comparison of the two design criteria
在顶层准则约下,进一步完善运载火箭的构型论证、总体多专业回路设计等流程:构型论证流程中,构型应选用合理推力量级、合适台数的发动机进行动力冗余设计,做好动力冗余与可靠性设计之间的平衡;总体多专业回路设计流程中,在各专业设计环节注入相应的典型故障,开展故障设计与校核工作,优先调整下游专业设计,避免上游专业的反复。
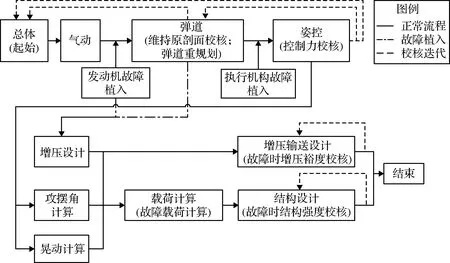
图11 运载火箭总体多专业回路设计流程图Fig.11 General multi-disciplinary loop design framework for launch vehicles
5 总 结
智能飞行技术是实现航天运输系统高质量发展的重要途径,通过制定中国航天运输系统智能飞行技术架构,为系统提升中国航天运输系统的智能飞行技术攻关与应用提供指导。为了尽快迈进智能飞行第三阶段、达到国际先进水平,短期内需重点推动顶层总体设计准则与流程落地,并配合设计标准的修订和更新,确保新研型号的总体设计的优良基因;同时集智攻关,组织优势力量加快推动“健康监测-剩余能力评估-任务重规划-控制重构”等关键技术在型号上的闭环应用,初步实现智能飞行技术“感知与监测-评估与决策-执行与处置”三项核心功能的落地应用。
当前随着常态化、航班化进出空间需求日益提升,需将航天运输系统重新回归运载工具本质特征,充分考虑飞行任务剖面参数的快速变化与未知性,通过智能飞行核心技术的进步,配合低成本重复使用、高性能组合动力等技术的应用,实现真正意义上的航班化进出空间,支撑航天强国建设,为中华民族伟大复兴汇聚民族力量。