基于STM32 的智能种树机器人*
2023-04-14吴昊栋宋宗晓王艺佳任怡宣李冰冰
吴昊栋,宋宗晓,王艺佳,任怡宣,李冰冰
(河南科技大学机电工程学院,河南 洛阳 471003)
植被是陆地生态系统的主体,具有固碳释氧、调节气候、涵养水源、防风固沙和文化旅游等功能。对于维护全球生态安全、保护地球生态环境具有不可替代的作用。据报道,4 000 m2林带,一年中可吸收并同化100 000 kg 的污染物。它调节着自然界中空气和水的循环,影响着气候的变化,减轻环境污染给人们带来的危害。森林也是多种动物的栖息地,是多类植物的生长地,是地球生物繁衍最为活跃的区域。中国生态环境的基本状况是:治理能力远远赶不上破坏速度,生态赤字在一定程度上逐渐扩大;森林资源锐减,中国许多主要林区的森林面积大幅度减少;全国森林采伐量和消耗量远远超过林木生长量。
1 总体设计及工作流程
基于STM32 的智能植树机器人主要可分为机械部分与控制部分2 个部分。机械部分主要包括树苗存储投送装置、挖洞装置、填土装置、浇水装置等。控制部分分为STM32 单片机控制板和直流电机驱动板等几部分。
整个工作流程由准备工作和进行作业2部分组成。准备工作主要是先将树苗放入树苗存储盒并保证每个格栅只放一棵树苗,之后为浇水水箱加满水。完成准备工作之后开始进行作业,启动机器,由stm32 控制机器按既定程序运行,它控制直流电机驱动板,对各个电机进行控制。进而控制树苗存储投送装置、挖洞装置、填土装置、浇水装置等各个装置稳定高效有序运行。装置运行大致如下:首先进行挖洞作业,用挖洞装置完成,用树苗储存投送装置将树苗稳定运至洞口处。再通过填土装置对周围土壤进行聚拢,从而稳定并直立树苗。最后浇水装置进行浇水作业。输送适量的水对土壤进行湿润,保证树苗直立及之后树苗成活。总体设计如图1 所示。
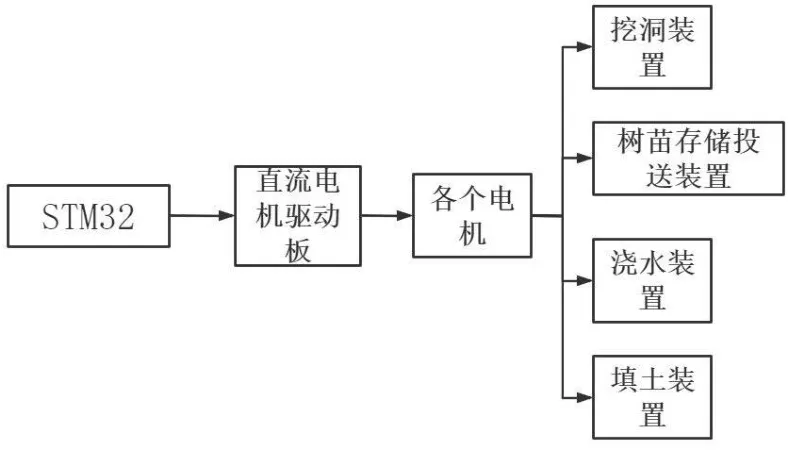
图1 总体设计
2 控制系统
控制系统由主控制器、超声波避障模块、直流电机驱动板等构成。
2.1 主控制器
主控芯片采用STM32F103ZET6,此芯片为中等容量增强型,32 位基于ARM 核心的128 kB 字节闪存微控制器USB、CAN,7 个定时器、2 个ADC、9 个通信接口、2 个12 位模数转换器,1 μs 转换时间(多达16 个输入通道);ARM 32 位的Cortex-M3 CPU(最高72 MHz 工作频率),内核为Cortex-M3,该款处理器适合处理大量信息和同时控制多个硬件,能够较好地完成此次任务。
系统整体软件设计流程思路为:首先初始化程序并设定树苗总数为N,然后开始前进,在前进途中识别系统识别前方是否有障碍,若有障碍,则进行避障;若无障碍,则一直前进。同时系统会实时检测行进距离是否达到设定距离,当达到距离后,机器停下并开始一次作业,并减去数目,然后进入下次流程,直到N=0,则机器停止运行。系统软件设计流程如图2 所示。

图2 系统软件设计流程
2.2 超声波避障设计
避障模块采用超声波避障模块HC-SR04,由于小车作业地点在户外可能会有障碍物干扰小车工作,所以选用超声波避障模块检测障碍物与小车的距离,并对检测的距离与程序设定的安全距离进行判定,判断是否需要启动自动避障动作。此避障模块向外界发送40 kHz 的工作频率,能够自行设定发射超声波的频率,但设定频率需要适中(频率过高会加重单片机内核运算负荷,过低会导致距离检测不及时,无法避障)。超声波模块将反射时间输入给单片机内核,单片机将时间代入声波和距离计算公式,即可计算小车与障碍物的距离,有效躲避障碍物。
2.3 直流电机驱动板
直流电机驱动板采用L298N 电机驱动板,L298N芯片可以驱动2 个二相电机,也可以驱动一个四相电机,输出电压最高可达50 V,可以直接通过电源来调节输出电压;可以直接用单片机的IO 口提供信号;电路简单,使用比较方便。同时L298N 可接受标准TTL逻辑电平信号VSS,VSS 可接4.5~7 V 电压。4 脚VS接电源电压,VS 电压范围为+2.5~46 V。输出电流可达2 A,可驱动电感性负载。1 脚和15 脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。L298 可驱动2 个电动机,OUT1、OUT2、OUT3、OUT4 之间可分别接电动机,5、7、10、12 脚接输入控制电平,控制电机的正反转。En A、En B 接控制使能端,控制电机的停转[1],而本小型植树机器人使用的均为直流电机。此外该驱动板体积小,符合此机器设计要求。其原理图如图3 所示。
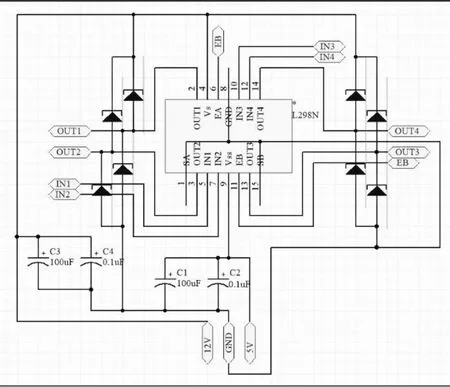
图3 L298N 电机驱动板原理图
3 机械系统
机械系统由树苗存储投送装置、挖洞装置、填土装置、浇水装置等组成。
3.1 树苗存储投送装置设计
树苗存储投送装置如图4 所示,此装置由直流电机、树苗存储盒(底部无挡板)、推杆(杆为齿条)、齿轮组等构成。
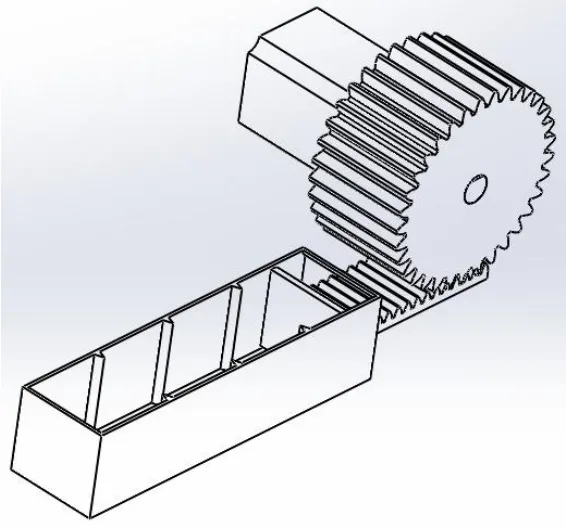
图4 树苗存储投送装置
该树苗存储盒可一次储存多棵树苗,以便于一次填充长期使用,盒内壁有多对由软性材料制成的齿形挡板,这些齿形挡板将树苗一一分隔开来,即2 对相邻挡板构成一个格栅且只存放一棵树苗。同时齿形挡板限制了推杆进给的距离,以便于将树苗逐个投送,此外软性材料还可以减少对推杆的磨损,增加装置使用年限。在此储存盒下有一个挡板,挡板在储存盒末端对应位置处有一适当开口,便于将单个树苗掉落至树苗引导管中(树苗引导管在挖洞装置中演示)。在送苗过程中,控制系统控制直流电机以一定速度转动,带动其上安装的齿轮转动,齿轮和齿条啮合,使推杆向前推进,推进的距离保持在2 对齿形挡板之间的长度,使其每次只进给一棵树苗至树苗引导管,树苗最终平稳落至挖洞机构挖的洞中,完成送苗任务。
3.2 挖洞装置设计
挖洞装置由挖洞尖锥、树苗引导管、直流电机等组成。挖洞流程为:首先直流电机驱动挖洞尖锥插入土中进行打洞,接着为树苗引导管,如图5 所示,将树苗存储输送装置中输送的树苗平稳运送至土壤洞中。在此过程中挖洞尖锥在左边管道进行工作,而右边管道输送树苗。挖洞尖锥完成挖洞任务后缩退至2管道连接处上方。而此时树苗存储投送装置中的直流电机开始工作带动齿轮以一定速率转动,推动树苗至末尾镂空处掉落进右边管道,最终落至洞中。
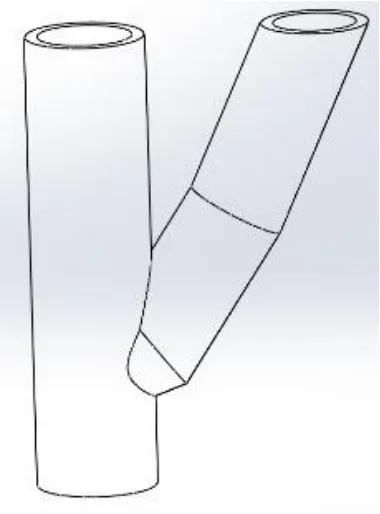
图5 树苗引导管
挖洞尖锥采用三瓣式结构,如图6 所示,在挖洞过程中三瓣式收紧呈锥状,当打孔深度达到设置值后,反复展开闭合三瓣式结构,使坑洞变大,随后再闭合此结构,向上回收,最后闭合过程中还能将孔洞的多余土壤取出。
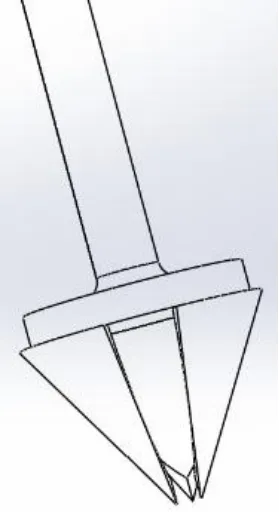
图6 挖洞尖锥
鉴于土壤松软程度不同,可使用大扭矩行星齿轮直流减速电机。如28GP-385 行星齿轮直流减速电机其额定扭力输出至高可达到50 kgf·cm,极限扭力输出至高可达120 kgf·cm。能够适应不同土壤环境进行打洞。同时采用了D 型输出轴,能够进行稳定连接。除此之外树苗引导管还能充当挖洞尖锥的外保护壳,防止外部作业环境对锥具造成损伤。而树苗引导管相当于挖洞尖锥保护壳与树苗输送管的结合装置,此装置符合小体积智能机器的集成化要求。同时控制系统可以设置打洞深度,以满足不同品种树苗对于种植深度的不同需求,实现差异化作业的同时,能在一定程度上优化能源分配。
3.3 填土装置设计
填土机构主要由填土压片、连接杆、直流电机等构成。填土装置安装在整个机器尾部,通过直流电机提供能源使连接杆按照设定路径运动,而连接杆采用双关节连接,能够大大提高其自由度,使其完成较为复杂的填土路径作业。而填土压片由U 型钢材板件构成,U 型缺口的设计是为了防止在填土过程中误压到树苗,造成损失。而钢材的使用使得压片板能适应大部分土壤环境,减小材料的磨损而且经济性高。此外要保证U 型压板倾斜工作,这种工作方式能在移向树苗的过程中拢聚更多土壤。同时使用直流电机控制其移动的正反方向来实现填土压片的左右往复运动,从而完成培土过程中的反复拍土工作,提高填土质量,保证树苗直立稳定种植[2]。
3.4 浇水装置设计
浇水装置主要由喷头、阀门、水箱等结构组成。当填土步骤结束之后,通过STM32 来控制阀门的开关,进而完成浇水作业。与此同时,针对不同树苗所需要的不同水量,可以通过改变开关阀门出水间隔时长来实现,以此满足差异化需求。这样使得此浇水装置能够满足大部分树苗的需求,使此浇水系统普遍化,被广泛使用[3]。
4 结语
当代科技飞速发展,但环境也不断被恶化,改善环境的方法多种多样,而植树是其中最简单也很有效的方法之一,但人工植树效率较慢且十分耗费体力,由机器代替植树就可以避免这一点。本文主要介绍了一种基于STM32 的智能种树机器人的结构及运动设计,本机器采用了全新自主设计的送苗机构,并且整体具有高度集成化及自动化的特点。为了实现预期的机器高效工作过程,采用多种机构联合作业,利用齿轮齿条传动的的特点,并借助STM32 单片机的良好性能控制电机转速,完成行进、挖洞、送苗、培土、浇水等过程。用Solidworks 进行结构上的模型设计,并对它进行仿真模拟,数据表明此结构完全符合早期的期望效果。机器工作中还可以调整一些作业参数,以增强机器在各种环境中的适应性。该机器为以后大型全自动植树机器的发展提供新思路。
