基于激光雷达的三用工作船智能感知系统研究
2023-04-13汪伟奎张子贤谢斯
汪伟奎 张子贤 谢斯
1.天津中海油油田设施管理有限公司;2.广东海洋大学
1.研究背景
随着通信技术、计算机技术、AI算法以及各类传感器技术的高速发展,为船舶智能化技术研究与应用提供了可能性。提高外界环境实时感知的精度和实时性是智能船自主航行、避碰的前提与基础,也是目前智能船舶领域面临的一大技术挑战。激光雷达、视频等传感器被广泛应用于汽车自动驾驶、无人机技术等研发中,在目标探测、环境感知、路径规划、目标跟踪及自主航行避碰中发挥了不可忽视的作用。这些技术为智能船舶相关技术的研发提供了借鉴,将激光雷达融合应用于智能船舶的环境感知中,可以有效弥补船舶导航雷达盲区的探测能力,使船舶拥有全距离的高精度的环境感知与探测能力,在船舶故障感知、自动操纵与避碰和自动靠离泊功能方面将提升船舶智能化水平。
三用工作船是近海钻探、开采海洋石油中为平台服务的一种专用拖轮。它具有为平台守护、拖航移位、起抛锚、输送物资器材(包括油水)等功能[1]。三用工作船在靠泊平台作业过程中需要船长长时间高强度工作,需要包括船舶与平台间距离、空间等信息的支持,历史上曾多次发生三用工作船与钻井平台碰撞事故,造成了一定的人员伤亡和比较大的经济损失。尽管随着动力定位技术在三用工作船上的使用,提升了船舶位置感知和控制的能力,但还有部分船舶并不具备此类技术,需要针对性开发,用以提升三用工作船的感知能力和安全[2]。
2.研究现状
风浪流以及密集交通流等环境的复杂性对船舶提出了的高便捷和高可靠性要求,随着激光雷达技术的不断迭代,为其在海上安全应用提供了机会。2017年10月,谷歌公司与罗罗公司联合开发的智能船舶态势感知系统技术,利用激光雷达、传统雷达、GPS等信息与电子海图技术对水面环境进行三维构建,借以实现船舶自主航行、避障与靠离泊功能[3],具体如图1所示。
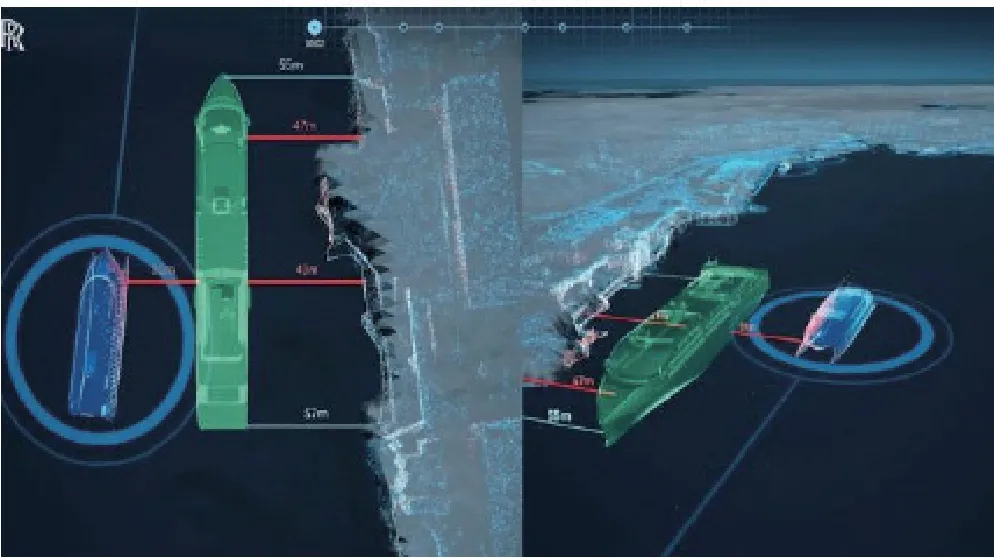
图1 谷歌与罗罗公司研发的船舶船智能态势感知系统示意图
同年,挪威“Yara”号智能船在实验中采用了雷达激光测距感知系统,借以实现对船舶周围态势的感知,辅助船舶探测岸线与障碍物,为实现船舶的自动靠离泊提供了技术支持,具体如图2所示。

图2 “Yara”号态势感知示意图[4]
2018年丹麦马士基公司宣布将在一艘冰级集装箱船上安装计算机视觉、激光雷达传感器和开发的专业感知软件,利用激光雷达等传感器收集船舶周围的环境信息。2019年5月16日,中国“智腾”号智能船搭载了激光雷达等传感器作为感知设备,利用相关算法借以实现近距离目标的探测和态势感知,并进行了世界首个公开的实船避碰演示,取得了良好的效果。激光雷达还被应用在船舶靠泊监测[4]、无人测量船感知[5-6]、无人船障碍物识别[7]、超载吃水监测[8]、水面船只监测[9]等多个方面,显示了技术的一定优越性。
3.激光雷达信息提取算法模型及流程
3.1 激光雷达测距
激光雷达是一种基于飞行时间原理的主动光学传感器,具有非常精准与可靠性,可以实时获得反射点的距离信息并构造出点云数据,构建出船舶周围水面上的实时三维环境。后续可以对采集的原始点云信息充分提取,进行滤波处理、目标拟合模型构建、目标聚类识别、运动状态估计等,为态势智能感知系统提供有效的支持[4]。
3.2 点云算法模型
点云算法模型如图3所示,其流程主要包括点云数据预处理和点云信息提取两个环节。在点云数据处理环节,首先对采集的三维激光点云数据进行格式转换、坐标变换和去噪,为激光点云信息提取提供统一的数据格式。在点云信息提取环节,通过对三维数据重建获得关键的点云数据信息,并将点云数据进行聚类分析,最终获得目标(船舶、码头、泊位或者障碍物)信息,供船舶操纵使用。

图3 点云分析算法模型
4.算法验证
4.1 测试环境
如图4所示,激光雷达被分别安装在船舶和码头上进行感知测试。激光雷达作为数据采集模块,其数据经标准接口传输至处理模块,在算法的支持下发布到显示模块。

图4 测试环境示意图
4.2 雷达感知系统结构
本实验采用激光雷达参数如表1所示。系统结构如图5所示。

表1 激光雷达参数

图5 雷达感知系统结构示意图
4.3 测试效果
具体测试效果如图6、图7所示。图6为激光雷达被安装在船舶上进行感知测试。图中a为感知的船舶尾迹,b为航道边界的物体,c为船舶前方桥梁,d为船舶穿越桥洞后的桥梁。通过观察d点点云数据,发现激光雷达对于超出一定角度的物标难以感知。图7为激光雷达被安装在码头上进行感知测试,e为感知的船舶,f为感知的波浪数据。
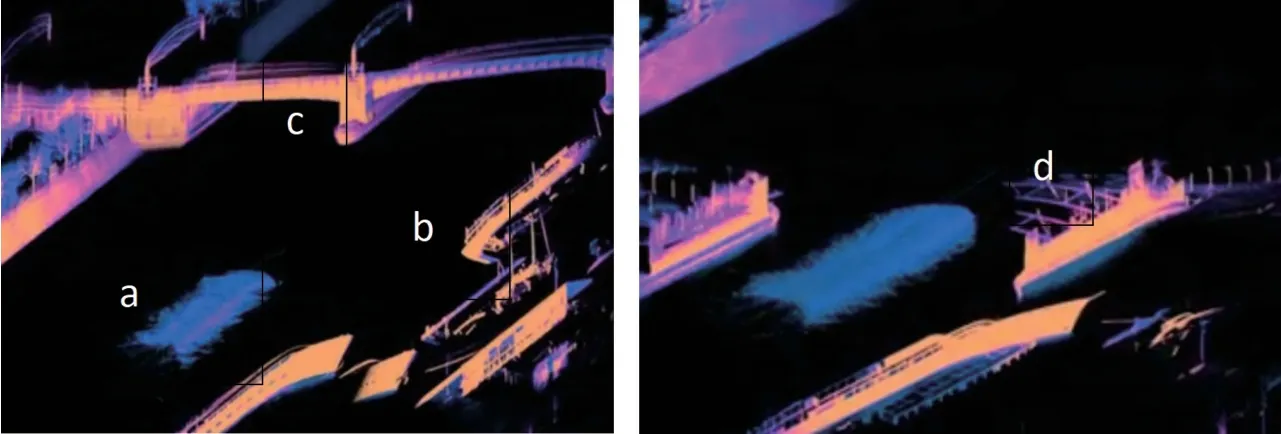
图6 感知系统布置在船舶感知环境动态示意图

图7 感知系统布置在码头感知船舶动态示意图
5.总结
本文在研究国内外船舶智能感知技术的前提下,提出了基于激光雷达传感器三维激光点云数据的三用工作船智能感知技术,利用三维激光传感器扫描周边环境,经相关算法解析感知周边环境,自动捕捉船舶运动形态,为船舶避障提供技术支持。在船舶靠泊时提供船首、船尾相对码头距离、速度等关键动态参数信息。本研究初步研究了基于三维激光点云数据信息提取模型,为相关研究提供了理论基础和原型系统。由于客观条件限制,研究还存在一些不足,建议可以采用较高线束的激光雷达,进一步改进算法,逐步改进感知能力。