基于对称非线性函数的变步长LMS 自适应滤波算法*
2023-04-12刘思蔚唐宇龙
肖 玮,刘思蔚,2,唐宇龙,李 明
(1.陆军勤务学院,重庆 401311;2.解放军63798 部队,四川 西昌 615000)
0 引言
自适应最小均方误差(least mean squares,LMS)滤波算法是1960 年由Widrow 和Hoff 首次提出的。其原理是基于最速下降法,沿权值梯度估计值的负方向进行搜索,直到达到权值最优为止。算法原理简单、鲁棒性好、计算量小、易于实现,广泛应用于导弹引信、雷达、声纳、通信、导航和工业控制领域的信号处理中[1-5]。步长因子是影响LMS 自适应滤波算法收敛速度和稳态误差的一个重要因素[5-7]。步长因子较大时,算法虽然收敛速度快,但稳态误差亦较大;反之,稳态误差虽小,但收敛速度也较慢。上述矛盾一直制约着LMS 自适应滤波算法的进一步推广应用。为此,学术界开展了大量变步长LMS 自适应滤波算法的研究[8-14]。基本思路是通过构造步长因子与稳态误差的非线性关系,使收敛初始阶段的步长因子较大,以便获得更快的收敛速度;当算法收敛后,则以较小的步长因子确保获得较小的稳态误差。
Sigmoid 函数表达式如式(1)所示,是一个在值域(0,1)之间、形如S 曲线的非线性函数[15]。当自变量x>0 时,Sigmoid 函数的一阶导数先变大再变小,十分符合LMS 自适应滤波算法对步长因子的动态变化要求。文献[12]通过设计步长因子μ(k)是误差e(k)的Sigmoid 函数(如式(2)所示),提出了基于Sigmoid 函数的变步长LMS(sigmoid variable step LMS,SVSLMS)自适应滤波算法。仿真表明SVSLMS算法在计算量增加不多的前提下,能同时获得较快的收敛和较小的稳态误差。但当误差趋向于零处时,SVSLMS 算法存在步长因子波动过大、不稳定的问题。文献[12]提出变步长归一化LMS(variable step normalized LMS,VSNLMS)算法,设计了式(3)所示的步长因子与误差的函数关系,新函数比Sigmoid函数简单,且在误差接近零处具有缓慢变化的特性,从一定程度上克服了SVSLMS 算法的不足。但式(3)中参数α 和β 需通过实验获得。文献[16]结合SVSLMS 算法收敛快和归一化最小均方算法(normalized LMS,NLMS)[17]误差低的特性,提出了一种改进的变步长VSNLMS 算法,设计了如式(4)所示的步长因子与误差的新关系。式(4)中相关参数同样需要大量仿真实验选取。
综上所述,变步长LMS 自适应滤波算法虽然从一定程度上解决了LMS 自适应滤波算法稳态误差和收敛速度难以兼顾的问题,具有重要研究意义和应用价值,但在构造步长因子与误差的非线性关系中仍存在上述诸多问题。为此,本文提出一种基于对称非线性函数的变步长LMS 自适应滤波算法。通过自变量取绝对值、叠加非线性拉伸量改进Sigmoid函数,构造一个对称非线性函数用于表示步长因子与稳态误差的非线性关系。该对称非线性函数具有能够根据误差动态调整步长、更快达到收敛状态的特点。然后根据构造的对称非线性函数和输入信号功率生成归一化变步长因子,解决噪声逐级放大的问题,进一步提高算法的滤波效果。本文重点对构造对称非线性函数和生成归一化变步长因子等关键技术进行了阐述,并通过大量对比仿真实验验证了算法的有效性。
1 算法思想
基于对称非线性函数的变步长LMS 自适应滤波算法的基本思想如下页图1 所示。
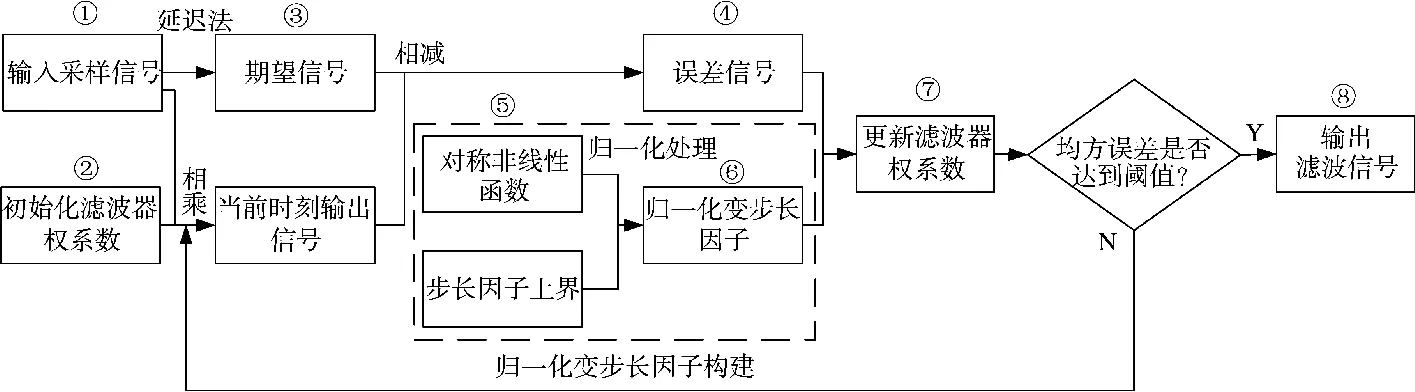
图1 基于对称非线性函数的变步长LMS 自适应滤波算法Fig.1 Variable step size LMS adaptive filter algorithm based on symmetric non-linear function
1)输入采样信号x(k),0<k<N,N 表示采样点数。
3)构造期望信号d(k)[18]。首先对输入信号x(k)采样延迟m 点,得到采样延迟信号x(m+k),m∈(0,N)。然后对x(m+k)求自相关得到rx(m)。最后将rx(m)作为滤波器的期望信号,完成d(k)的构造。
式中,rsn(m)和rns(m)分别表示周期为T 的信号s(k)和随机噪声n(k)的互相关。由于n(k)为随机噪声,因此,n(k)与s(k)不相关,rsn(m)和rns(m)近似为零。rn(m)是随机噪声n(k)的自相关函数,当m>M 时,rn(m)衰减很快,近似为零。由自相关函数性质可知,rs(m)是以T 为周期的周期函数时,rx(m)也呈现以周期为T 的变化。
4)得到误差信号。通过k 时刻的输出信号y(k)与期望信号d(k)相减,得到k 时刻的误差信号e(k)。
5)构造对称非线性函数(如式(8)所示)。对Sigmoid 函数进行改进,解决Sigmoid 函数在自变量趋于0 时,其函数值波动过大的问题。

2 关键技术
重点介绍算法中对称非线性函数的构造和归一化变步长因子的生成等关键技术。
2.1 对称非线性函数的构造
为继承Sigmoid 函数能根据误差动态调整步长的优点,解决其在误差趋向于零时,步长因子波动过大、不稳定的问题,本文基于Sigmoid 函数改进构造一个对称非线性函数用于表示步长因子与稳态误差的非线性关系。其数学表达式如式(8)所示。具体步骤如下:

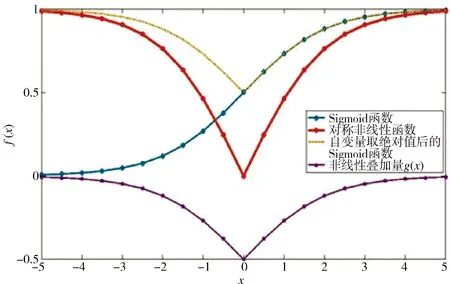
图2 对称非线性函数构造示意图Fig.2 Sketch map of strucure of symmetric non-linear function
2.2 归一化变步长因子生成
度,避免滤波器收敛时步长发生较大变化。图4 给出了β 分别取0.5、1、1.5、2,α=1 时,误差和步长因子的仿真关系图。由图4 可知,当误差为2、β 为1.5和2 时,步长因子的取值最大,即此时滤波器收敛速度快,正朝着误差减小的方向快速收敛;随着误差逐渐减小,步长因子变化由快到慢,特别是当临近收敛状态时,步长因子逐步减小到零。因此,该参数条件下滤波器性能较好。当误差为2、β=1 时,较β为1.5 和2 的仿真结果,其整体变化趋势相同,只是当误差较大时,步长因子变化略慢;当误差接近零时,步长因子变化略快。当误差值为2、β=0.5 时,步长因子近乎以固定速率变化,在误差较大时,存在收敛速度慢的问题;但当误差临近零时,又因收敛速度过快对稳态误差造成较大影响引起系统振荡,因此,β=0.5 不可取。通过以上分析及图3 可知,β 越大,模型性能越优。但当β 取值过大(大于3)时将导致计算量陡增,系统处理时间变长。且过大的β 将使步长因子在误差较大时减小到一个较小值,导致系统的收敛速度变慢。当β≥1 时,才能使系统在接近收敛时不会由于步长因子的变化造成稳态失调。综上,算法中β 的取值范围为[1,3]。
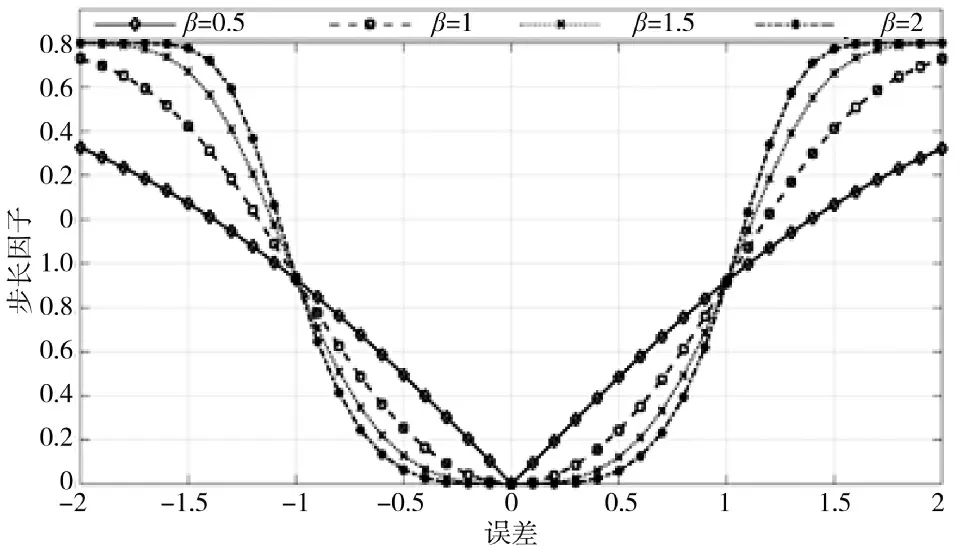
图3 步长因子与误差的函数模型曲线图(β=1,α=0.5、1、5、10)Fig.3 Function model curve of step factor and error(β=1,α=0.5、1、5、10)

图4 步长因子与误差的函数模型曲线图(α=1,β=0.5、1、1.5、2)Fig.4 Function model curve of step factor and error(α=1,β=0.5、1、1.5、2)
3 实验验证
为验证算法有效性,在MATLAB 环境中对本文算法、SVSLMS 算法和VSNLMS 算法从以下方面进行了对比实验:1)低信噪比;2)信噪比变化;3)信号频率变化;4)滤波器阶数变化;5)延迟采样点数变化。实验以目标距离为7.000 m 的线性调频连续波(linear frequency modulated continuous wave,LFMCW)雷达差拍信号为实验对象,相关参数如表1 所示,对应差拍信号频率约为10.85 kHz。所加噪声为加性高斯白噪声,信噪比设置为-10 dB,滤波器延迟50 个采样点,阶数为128。滤波后的信号采用快速傅立叶变换(fast fourier transformation,FFT)进行频率估计。共进行了1 000 次Monte_Carlo 实验。

表1 LFMCW 雷达参数设定表Table 1 LFMCW radar parameter setting table
3.1 低信噪比条件下
3.1.1 去噪性能
图5 给出了本文算法、SVSLMS 算法和VSNLMS 算法在-10 dB 低信噪比条件下的去噪性能对比图。由图5 可知:较经SVSLMS 算法和VSNLMS 算法滤波后的信号,经本文算法滤波后的信号突出的毛刺更少,信号波形更贴合无噪声信号波形,表明本文算法在实验所示的低信噪比条件下去噪效果优于其他两种算法。
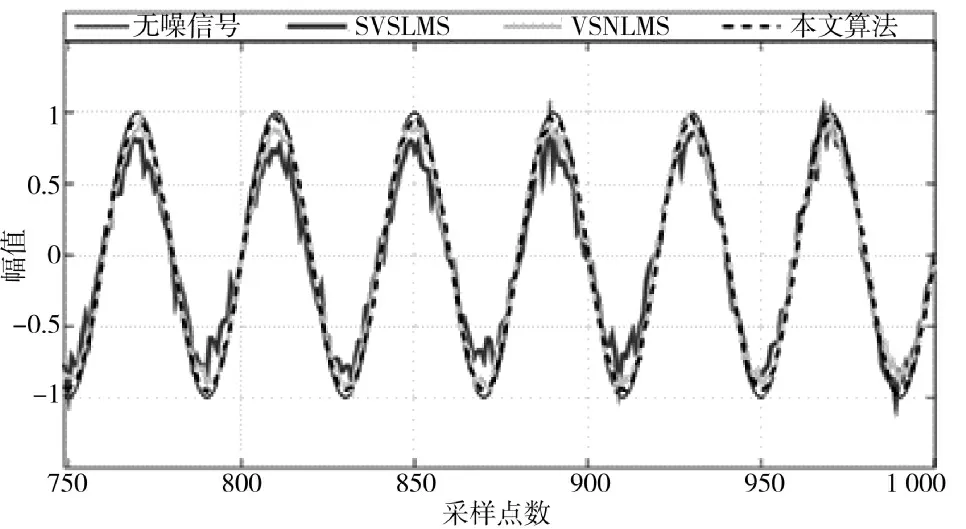
图5 SNR=-10 dB 时滤波前后波形对比图Fig.5 Front and back waveform comparision figure with SNR=-10 dB
3.1.2 收敛速度
图6 给出了本文算法、SVSLMS 算法、VSNLMS算法以及固定步长LMS 算法在-10 dB 低信噪比条件下的收敛速度对比图。由图6 可知:本文算法的均方误差较其余3 种算法能更快到达收敛状态,且收敛状态的均方误差更小。表明本文算法去噪效果较其他3 种算法有所提高且稳定性好。同时,4 种算法达到收敛状态的迭代次数依次为[6、15、10、180]次,表明本文算法的收敛速度快于其他3 种算法。
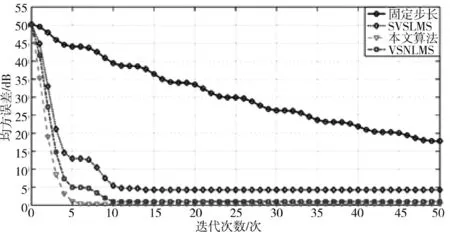
图6 均方误差随迭代次数变化图Fig.6 Variation figure of mean square error with iteration times
3.1.3 步长因子变化条件下
图7 给出了本文算法、SVSLMS 算法和VSNLMS 算法在-10 dB 低信噪比条件下步长因子的变化对比图。由图7 可知:在算法到达稳态前,本文算法的步长因子更大,即具有更快的收敛速度。在达到稳态后,较其余两种算法,本文算法的步长因子波动幅度更小,能更快到达稳定状态。
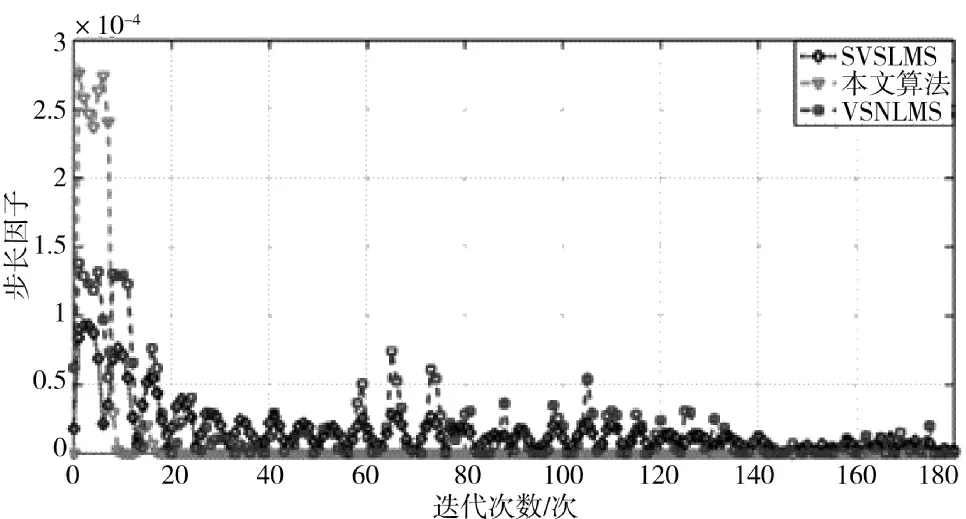
图7 步长因子随迭代次数变化图Fig.7 Variation figure of step factor with iteration times
3.2 信噪比变化条件下
为比较本文算法、SVSLMS 算法、VSNLMS 算法以及固定步长LMS 算法在不同信噪比条件下的去噪性能,在信噪比依次设定为[-13、-11、-9、-7、-5、-3、-1、1、3、5、7]dB 的条件下进行了11 组实验。
由图8 所示的实验结果可知:经上述4 种算法滤波后,信号频率估计值的均方根误差(root mean square error,RMSE)均随着信噪比的增大而减小,但经本文算法滤波的均小于其他3 种算法,且没有出现较大波动,更贴近克拉美罗下限(cramer-rao lower bound,CRLB)。表明本文算法在实验所示不同信噪比条件下均有较好的滤波效果,且性能稳定。
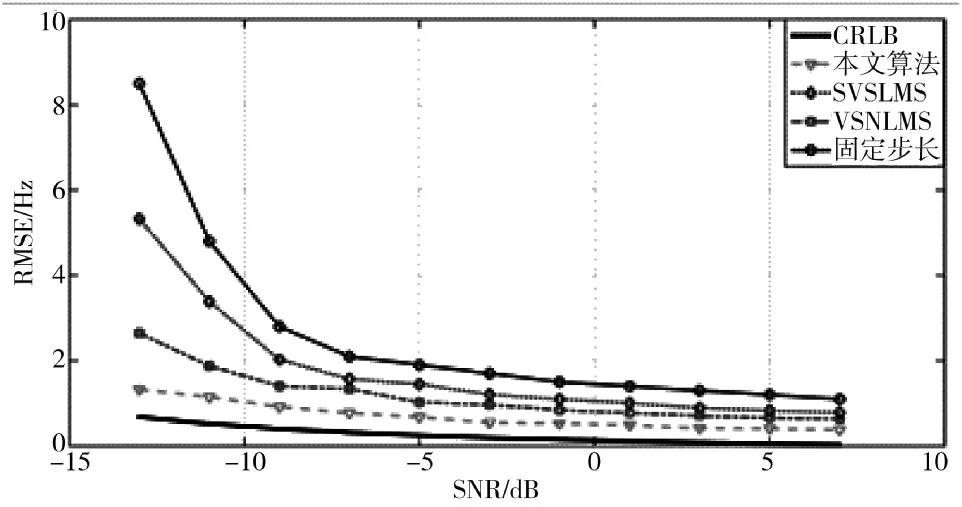
图8 信噪比变化条件下RMSE 变化曲线图Fig.8 RMSE variation curve under the signal-to-noise ratio change condition
3.3 信号频率变化条件下
为比较本文算法、SVSLMS 算法、VSNLMS 算法以及固定步长LMS 自适应滤波算法在信号频率变化条件下的去噪性能,通过改变目标距离实现差拍信号频率变化,在图9 所示的信号频率变化条件下进行了11 组仿真实验。由图9 可知:经本文算法滤波后,在信号不同频率点的RMSE 维持在1.20 Hz左右,SVSLMS 算法、VSNLMS 算法和固定步长LMS自适应滤波算法的RMSE 分别为2.80 Hz、1.70 Hz和3.90 Hz 左右。经4 种算法滤波后,信号频率估计值的RMSE 随着信号频率的增加略有增加,但经本文算法滤波后信号频率估计值的RMSE 明显小于其他3 种算法,表明本文算法在不同频率点均有较好的滤波效果,且性能稳定。
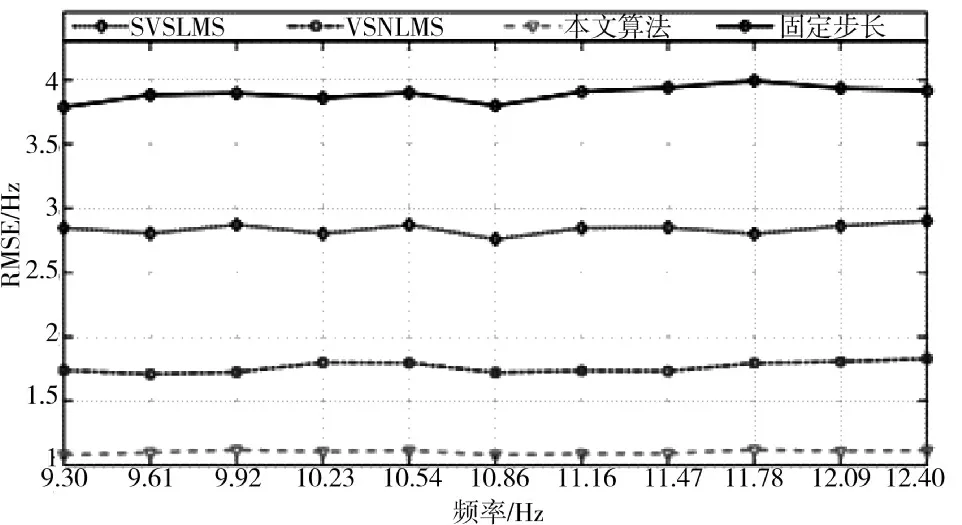
图9 信号频率变化条件下RMSE 变化曲线图Fig.9 RMSE variation curve under the signal frequency change condition
3.4 滤波器阶数变化条件下
为比较本文算法、SVSLMS 算法、VSNLMS 算法以及固定步长LMS 自适应滤波算法在滤波器阶数变化条件下的去噪性能,在滤波器阶数依次设定为[32、64、96、128、160、192、224、256、288]条件下进行9 组实验。由图10 所示的实验结果可知:经4 种算法滤波后,信号频率估计值的RMSE 均随着滤波器阶数的增加而减小,经本文算法滤波后信号频率估计值的RMSE 在上述滤波器阶数条件下均小于其他3 种方法,且没有出现较大的波动,滤波性能较稳定。
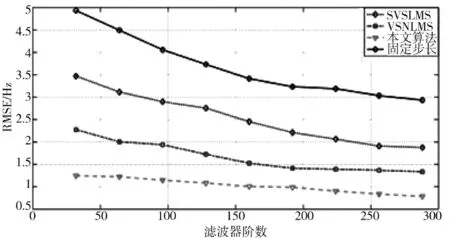
图10 滤波器阶数变化条件下RMSE 变化曲线图Fig.10 RMSE variation curve under the filter order change condition
3.5 延迟采样点数变化条件下
为比较本文算法、SVSLMS 算法、VSNLMS 算法以及固定步长LMS 自适应滤波算法在延迟采样点数变化条件下的去噪性能,在滤波器延迟采样点数依次设置为[30、40、50、60、70、80、90、100、110]的条件下进行了9 组实验。由图11 所示的实验结果可知,本文算法在不同延迟采样点数的RMSE 基本维持在1.10 Hz 左右,SVSLMS 算法、VSNLMS 算法和固定步长LMS 自适应滤波算法的均方根误差RMSE 分别为2.80 Hz、1.80 Hz 和3.80 Hz 左右。经4种算法滤波后,信号频率估计值的RMSE 随着延迟采样点数的增加略有减小,但经本文算法滤波后,信号频率估计值的RMSE 明显小于其他3 种算法,表明本文算法在各延迟采样点数均有较好的滤波效果,且在不同延迟采样点数性能稳定。
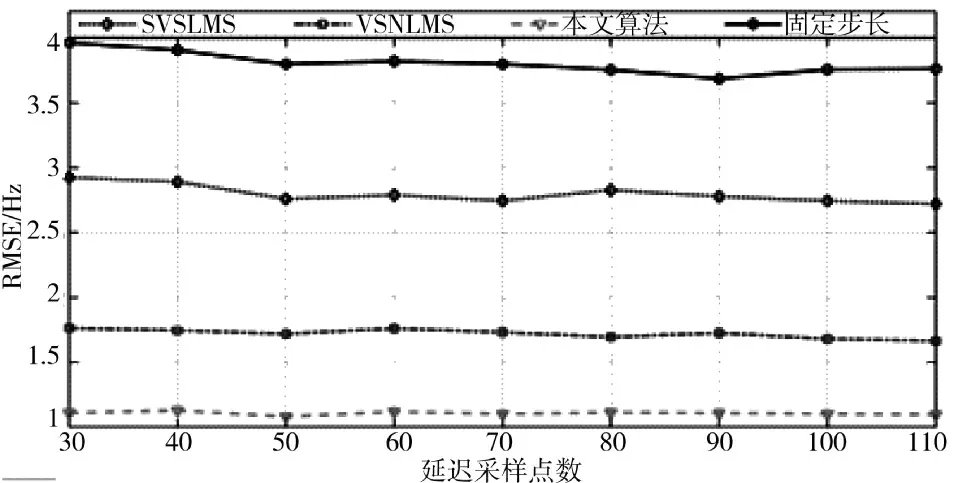
图11 延迟采样点数变化条件下RMSE 变化曲线图Fig.11 RMSE curve under the condition of the different delay sampling point
4 结论
针对LMS 自适应滤波算法的收敛速度和滤波性能难以同时达到最佳的问题,本文设计了一种基于对称非线性函数的变步长LMS 自适应滤波算法。重点对对称非线性函数的构造和归一化变步长因子的生成等关键技术进行了阐述。为继承Sigmoid 函数能够根据误差动态调整步长的优点,首先通过自变量取绝对值、叠加非线性拉伸量对Sigmoid 函数进行改进,构造一个对称非线性函数用于刻画步长因子与稳态误差的非线性关系。构造的对称非线性函数具有能够根据误差动态调整步长、更快达到收敛状态的特点。然后根据构造的对称非线性函数和输入信号功率生成归一化变步长因子,解决噪声逐级放大的问题,进一步提高算法的滤波效果同时,加速收敛。最后,将本文算法和几种典型LMS 算法在MATLAB 中进行了对比实验。实验结果表明:较几种典型LMS 算法,本文算法在低信噪比条件下、信噪比变化条件下、信号频率变化条件下、滤波器阶数变化条件下、延迟采样点数变化条件下,具有更好的滤波效果、更优的稳定性和更快的收敛速度。
