火星车通过性评估技术现状与展望
2023-04-10党兆龙陈百超李玉琼
申 彦,邹 猛*,党兆龙,陈百超,李玉琼
(1.吉林大学 工程仿生教育部重点实验室,吉林 长春 130022;2.中国空间技术研究院 北京空间飞行器总体设计部,北京 100094;3.中国科学院 力学研究所 中国科学院流固耦合系统力学重点实验室,北京 100190)
1 引言
随着人类科技水平不断提高,深空探测发展迅速。但由于地外行星地形地貌的未知性和复杂性,要完成对地外行星的研究探测,必须借助移动式星球车。考虑到地形的复杂性、信息的延迟以及自然环境的恶劣,火星车需要有良好的机动性和完善的通过性判断方法来确保其安全运行。
在月球探索任务中,前苏联Lunoknod 月球车和美国载人月球车(Lunar Roving Vehicle,LRV)配备了测试月壤力学参数的仪器,但由于火星车质量和尺寸的限制,未携带测量火星壤力学参数的设备。因此,只能通过火星车对外界环境的感知来进行通过性评估。
目前,我国火星探测任务初步展开,在巡视探测方面相比美国还有较大差距,为了更好地对通过性进行判断,有必要调研总结现有评估和预测方法。本文中第2 节介绍了通过性评估的研究背景,第3 节介绍了针对火星通过性的研究现状,第4 节归纳总结了目前已发射成功的火星车的通过性评估方式,第5 节对当前存在的通过性评估新技术进行了讨论,第6 节对未来的发展方向进行了展望。
2 地面车辆通过性评估
2.1 车辆通过性
地面车辆通过性指车辆能够以一定速度通过各种危险地带(如松软地面、凹凸不同地面等)和障碍(如陡坡、侧坡、壕沟、石块、灌木)的能力。
通过性可以分为支撑通过性和几何通过性。支撑通过性指车辆顺利通过松软土壤(如沙漠、雪地、冰面沼泽和星球表面等)的能力,主要取决于土壤的物理和力学特性。几何通过性指车辆通过坎坷不平路段和障碍的能力,主要取决于车辆结构参数和几何参数,通过分析接近角、离去角、离地间隙等车辆的结构参数,可以直接计算评估几何通过性。判断车辆通过性主要考虑两方面,一是土壤对车辆的支撑作用,二是车辆本身的结构参数。本文将主要集中调研和分析星球车在松软星表的通过性。
对于支撑通过性的评估,主要有以下两种方法:
(1)经验法,选择具有代表性的车辆在相关地面进行测试,通过简单的测量或现场观察对地面进行识别,然后经验性的将车辆性能的测试结果与所识别的地面特征关联起来。有代表性的是美国陆军水道实验站所提出的基于圆锥指数的经验方法,该方法使用圆锥指数来描述地面特性,该指数通过圆锥透度计(Cone Penetrometer)获得,然后将车辆性能与锥形指数或其导数连接起来。除圆锥指数外,广泛被用于描述地形特征的还有平均最大压力(Mean Maximum Pressure,MMP)这一概念,其定义为在所有负重轮位置下的最大压力的平均值。
(2)模型法,将地面-车辆视为一个系统,考虑车辆各部分的机械特征及车辆的工程结构影响地面-车辆系统的优劣顺序,规定地面与车辆结构之间的关系,构建系统模型,并尽可能地用数学方程表示出来。主要采用两个指标:牵引系数(单位挂钩牵引力)和效率系数。
2.2 基于地面力学的支撑通过性评估
地面力学起初应用于评估野外复杂地形条件下车辆通过性[1-2],后随着阿波罗月球探测任务的成功进行,地面力学被应用于深空探测领域,发展出了新的分支。
20 世 纪30 年 代,M.G.Bekker 在波兰华沙 工学院设立地面车辆力学学位课程并建立了相应的实验室。在此之后,国内外众多学者从车轮与地面相互作用的不同角度出发,提出了许多描述轮壤关系的方法,用以评价轮式车辆在松软路面的行驶性能。这些方法包括:经验法、半经验公式、有限元和离散元仿真,逐渐形成了以试验为主的经验模型方法[3],该方法被用于前苏联Lunoknod 与美国LRV 月球探测中,还有以物理模型为主的仿真数值计算方法[4-6],以及使用修正的Bekker 承压与剪切模型为基础的半经验法,该方法通过广大科研工作者的实验验证,成为目前广泛应用于描述刚性轮与松软土壤间相互作用的动力学模型[7-9]。应用半经验的地面动力学模型,通过轮壤之间的相互作用关系,在不增加火星车自身重量和设备的情况下,可以估计星壤力学参数,评估通过性。
3 火星通过性研究
3.1 火星表面及火星车
目前,成功进行火星探索的火星车共计6 辆,其登陆时间、地点以及运行状态如表1 所示。其中,美国是火星探测最成功的国家,共有5 辆火星车已经成功登陆火星表面并进行科学探测研究,我国祝融号也在2021 年5 月15 日上午成功登陆火星并展开科学研究任务。
从火星登陆器和火星车发回的照片和数据可知,火星表面覆盖一层松软的火星壤,并且遍布陨石坑、石块、沙丘与峡谷[10]。另外,火星表面的岩石分布密度大,覆盖率约为14%~20%。这些外部的苛刻条件,要求火星车具有良好的机动性、平顺性和通过性。
对于火星车而言,火星表面通过性是指火星车能够安全通过各种火星表面(如松软沙丘、薄壳和板状岩石地面等)及各种障碍(如石块、坡面和坑道等)的能力。同样地,可以分为几何通过性和支撑通过性。几何通过性的评估是通过雷达、图像信息进行判断来避开陡坡、大石块等;而支撑通过性由于无法先验判断火壤力学特性,只能进行简单估计,勇气号就因此陷入沙坑而导致探测任务结束,机遇号也因松软地面的高滑转改变探索目标,火星车的通过性评估难度很大。
火星车通过性评估重点在于感知外界环境信息。以感知到的信息作为通过性判断的输入条件,输入来源越丰富,评估的可信度越高;特别是火星壤力学参数对支撑通过性的评估十分必要,是目前通过性评估的短板。
3.2 环境感知
为了能够评估火星车通过性,需要通过感知系统对火星表面形貌和火星地面力学参数进行识别,为判断提供依据。感知系统有着非常广泛的定义,对于火星车而言,指的是通过一种或多种传感单元实现对火星车本体的状态监测以及对周围探测环境的识别认知。
感知系统的组成多种多样,根据传感器类型的不同,通常来说可以将传感器分为内部传感单元和外部传感单元,其中内部传感指的是对火星车本体的位姿估计,如惯性测量单元、里程计等,外部传感指的是对周围环境的监测识别、状态估计以及地形重构等,视觉相机、激光雷达等都属于外部传感的范畴。表2 展示了迄今为止成功探索火星的6 辆火星车的基本参数以及其所搭载的与通过性评估相关的科学载荷。

表2 火星车参数及载荷Tab.2 Parameters and loads of Mars rover
现有的感知系统通过图像和位置信息进行路径规划、导航和通过性评估,没有获取火壤力学参数的手段。但是火星车在火星表面进行探索和科学研究时,了解和掌握火星车周边火壤的力学参数对通过性评估至关重要。此外,该信息对于火星车车轮设计、牵引性能评价有着不可替代的作用。
3.3 火壤力学参数反演
目前还没有国家能够实现火星采样返回,研究人员也无法获得直接准确的火星壤物理力学参数。但火壤力学参数是通过性评估的主要输入参数,为了弥补现有星球车环境感知缺少力学参数的缺陷。原位测量就成为获取火星壤力学特性的重要手段,但是由于发射重量限制,目前在轨的火星车都没有配备专门的设备测量火星壤的物理力学参数,只能应用火星车或登陆器的触土部件(车轮、采样铲或足垫)反演计算火星壤的压缩、剪切强度和容重等物理力学参数。从火星车和登陆器返回的照片可见,车轮在火星壤留下明显的车辙痕迹,根据经典地面力学理论,车辆在松软地面行驶时,通过车轮与地面的相互作用,支撑并推动其前进。因此,可以建立车轮与火星壤相互作用模型来估算火星壤的物理力学参数。
科研人员利用索杰纳探测器单轮旋转剪切土壤,根据库仑定律对火星土壤的内聚力c和内摩擦角φ进行估测,进而判定该区域火星车的通过性[11]。结果显示,在轨火星车周边火星表面的火星壤内摩擦角均值为35.0°,内聚力均值为0.01 kPa。
勇气号和机遇号也通过车轮与地面的相互作用,进行了7 次挖掘试验和20 次刮擦试验,对古谢夫坑(Gusev Crater)和梅里迪亚尼平原(Meridiani Planum)进行了火星壤的内聚力和内摩擦角的估算,其中对内聚力的估算采用电机功的比例模型和轮缘剪切应力模型[12-13]。最后得出,内摩擦角为30°~37°,内聚力为0~2 kPa。
凤凰号探测器通过机械臂的挖掘试验反演火壤的力学参数[14-15],得出其内摩擦角为38°±5°,内聚力变化范围为(0.2±0.4)kPa 至(1.2±1.8)kPa。
此外,哈尔滨工业大学丁亮等[16]通过分析祝融号车轮和火壤的相互作用关系,对祝融号行驶区域的表层火壤参数进行了评估,得出祝融号行驶区域火壤内聚力在1.5~6 kPa 的条件下时,火壤等效刚度估计为1 390~5 872 kPa/mN,内摩擦角为21°~34°,数据表明表层火壤的承载强度和内聚力均处于较高水平。
目前在轨的大部分火星车和探测器都对其周边环境内的火星壤进行了力学反演,但是火星表面地形地貌复杂,火壤力学参数多变,原位力学反演受到诸多限制。为了简化反演流程,提高星壤反演的准确性,麻省理工学院Karl Iagnemma 等人利用简化轮壤关系模型,针对松软沙土在线预测内聚力和内摩擦角[17-19];与之相似的还有Shibly 反演模型[20],适用于低内 聚力可变地形;还有应用神经网络来对星壤的内聚力和内摩擦角进行反演[21];以及应用牛顿迭代法估算星壤的内摩擦角、剪切变形模量和沉陷指数[22-23]。
4 火星车通过性评估
4.1 索杰纳号
索杰纳号火星车于1997 年7 月4 日在火星表面着陆,1997 年9 月27 日终止通讯,1998 年3 月10 日正式结束任务。它是人类送往火星的第一部火星车。索杰纳号重10.6 kg,载荷5 kg,长65 cm,宽48 cm,高30 cm。最快行驶速度为1 cm/s,由0.25 m2的太阳能板和3 节蓄电池供电,见图1。
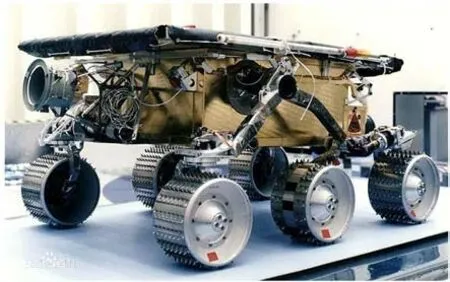
图1 索杰纳号火星车Fig.1 Sojourner Mars rover
索杰纳号火星车通过图像和地形传感器评估通过性,即地面操作人员从图像中直观地识别地形类别,然后进行路径规划,判别图像来自导航相机(Navcams)。
在向目标位置前进过程中,索杰纳号根据电机编码器(驱动)和电位器(转向)读数的平均值检测驱动电机运行状态,当到达设定阈值时,电机停止工作。电机关闭时,机载系统通过前方的立体相机、五台激光传感器和接触传感器来进行危险判读,遇到石块时,根据车轮里程表、电位计、陀螺仪、加速度传感器等信息进行转向以避开障碍物,继续向目标位置前进。每到一处位置,车载计算机还使用里程表和机载陀螺仪更新行进距离和方位信息[24]。
在探测期间,索杰纳号一共行走了106 m,共计执行地面指令114 次,同时为了便于地面通讯和控制,索杰纳号在与着陆器距离10 m 范围内进行探测,且每行驶6.5 cm 进行一次风险评估[25]。
索杰纳号在火星表面的通过性评估完全依赖于地面操作人员的判断。根据着陆器所拍摄的周边环境的照片、车体安装的相机和5 台激光测距仪,控制人员可以侦测周围地形、发现障碍物、规划安全路径。尽管如此,索杰纳号在行驶途中运行状态是未知的,仍有很大风险。
4.2 勇气号与机遇号
4.2.1 导航与定位方法
在火星车导航与路径规划中,位置判断是非常关键的,由于惯性测量单元只能在短时间内保证定位精度,且在非结构化火星表面容易发生车轮打滑。因此,勇气号和机遇号(Mars Exploration Rover,MER)采用视觉与惯性相结合的定位方法,在地形较为平坦且障碍物少的区域使用车载惯性测量单元(Inertial Measurement Unit,IMU)进行惯性导航,在比较松软火壤或斜坡上使用双目相机进行视觉导航,这种组合导航方式可以避免车轮打滑造成的误差。
MER 还运用了车轮里程计、光束平差法、地面与卫星影像对比、无线电定位、天文导航多种定位方法,保证了导航信息的准确性与实时性[26]。
除以上方法外,MER 还采用了视觉里程表(Visual Odometry,VO)方法,通过火星车导航相机获取序列立体影像进行相邻影像的特征点追踪实现自主定位,如图2。为了保证前后立体影像之间有较大的重叠和较小的目标形状变化,需要相邻影像拍摄间距不超过75 cm,摄影方位角的变化不超过18°。该方法修正了航迹推算法因车轮打滑而带来的定位误差。

图2 机遇号应用VO 法进行导航与定位(Sol304,8.7 m)Fig.2 VO method path planning and navigation for Opportunity(Sol304,8.7 m)
虽然VO 法定位精度较高,但由于火星车上计算机的限制,获取和处理一个立体像对并更新位置和姿态需要近3 min。因而VO 法只用于部分短距离关键路径上的局部定位(一般小于15 m),例如爬坡、滑转严重和接近指定的科学目标。
勇气号和机遇号火星车所用的视觉测程方法自主性强、精度较高,能改正航迹推算方法在车轮打滑和IMU 漂移时的定位误差。其缺点是计算速度慢、只能用于局部定位,成功与否依赖于地形特征。针对在地形特征贫乏情况下VO法失败的情况,应开发新的算法并结合其他定位方法予以克服。随着计算机能力的提高和算法的改进,未来的VO 定位方法可以实现快速、全程定位,有望得到广泛应用[27-28]
4.2.2 通过性评估方法
MER 自主导航和路径规划采用基于栅格法的火星表面通过性能评估方法(Grid-based Estimation of Surface Traversability Applied to Local Terrain,GESTALT),GESTALT 采用立体相机图像去判别地面通过性和障碍物[29],可以适用于狭窄和孤立的障碍区,但不适合密集障碍的地方。因此,在2006 年,基于D*法改进的field-D*法运用于MER 火星车导航软件中。
勇气号火星车在第Sol 779 天,右前轮驱动器失效锁死,极大影响其机动性能。图3 为Sol 781 勇气号前避障相机拍摄的车轮失效后的车辙情况,可以明显看出右前轮拖曳造成的痕迹[30]。

图3 勇气号右前轮锁死车辙Fig.3 Track of right front wheel lock up of Spirit
勇气号在Sol 1800 之后,沿着路线1 在Home Plate 区域行驶,过程中经历了较陡斜坡和碎石沙地,时常发生大的沉陷。因此,在Sol 1829之后改为路线2,如图4 所示。
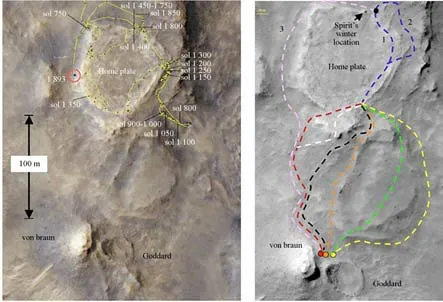
图4 Home Plate 区域地图和备选路线Fig.4 Home Plate area map and alternative routes
由于在路线1 时常沉陷,JPL 团队开发避险地图。该地图将坡度信息、团队评估得到的土壤和地貌类型进行耦合,产生以红-黄-绿为代表的火星表面风险表格地图,如图5 所示。在经过风险评估后,地面操作人员放弃了路线2,改为路线3。尽管如此,勇气号依然在Sol 1886 陷入Troy沙地,在Sol 1899 左中轮失速,地面控制团队最终停止操作。

图5 勇气号采用的火星表面风险地图Fig.5 Mars surface risk map of Spirit
在事后的分析中,研究人员认为勇气号是由于压碎了薄壳地面而陷入粉状无内聚力沙土中,这种地面具有视觉迷惑性,是勇气号陷入沙地的主要原因。当然,右前轮的失效,使得地面推力减小是另外一个原因。
以上可知,基于视觉的风险评估,仅能避免岩石、陡坡等可被观察到的障碍,不能获取火壤强度参数。解决问题的关键在于研究车轮与地面的相互作用,其中滑转率是关键。
4.3 好奇号
4.3.1 通过性评估方法
在MER 的基础上,好奇号火星车通过性评估增加了滑转率阈值,车载计算机实时监测滑转率变化,并与数据库中的滑转率阈值进行对比,如果阈值超过设定值,好奇号自动停止行驶[31]。
好奇号行驶时,一个火星日接收一次地面的指令,其它时间依靠自主导航程序,自主导航的移动距离一般不超过100 m。为了准确地向好奇号发出移动指令,美国国家航空航天局(National Aeronautics and Space Administration,NASA)的喷气推进实验室(Jet Propulsion Laboratory,JPL)建立地面实验室Mars Yard,如图6 所示,并采用动态测试模型车(Dynamic Test Model,DTM)进行分析测试,评估好奇号在火星不同地形的通过性[32]。

图6 JPL 火星地面试验场Fig.6 JPL Mars Yard
Mars Yard 位于美国加利福尼亚帕萨迪纳JPL 实验室内,面积约2 500 m2,为室外试验场。该试验场具有不同的地形地貌,能够代表好奇号在火星上遇到的大部分地形地貌。模拟火壤主要有三类:岩基路面、无内聚力和有内聚力的沙土。这三种模拟火壤是根据机遇号和勇气号在火星上行驶过的区域地质状况配置的[33],如图7所示。

图7 Mars Yard 不同土壤种类和坡度场地Fig.7 Different soil types and slope of Mars Yard
另外,NASA 利用好奇号的另一台模型车Scarecrow 在Mojave 沙漠的Dumont 沙丘进行试验,以求更逼真地模拟火星表面,得到更接近的试验数据,该沙丘与火星的盖尔撞击坑(Gale Crater)地形地貌接近[24]。Scarecrow 试验车质量为340 kg,是好奇号质量的3/8。其车轮与悬架与在火星上的好奇号完全相同,如图8 所示。
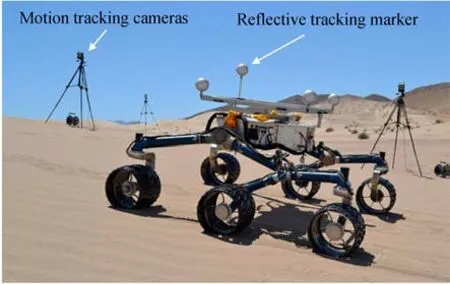
图8 Scarecrow 在Mojave 沙漠试验Fig.8 Experiment in the Mojave desert of Scarecrow
Scarecrow 使用蓄电池供电,无线操控。遥测信息与好奇号类似,包括电机电流、侧倾/俯仰/偏航(IMU 测量)以及悬架角度,采样频率2 Hz。另外,每个车轮轴上还装有超声波测距仪以测量车轮下沉。
NASA 在Mars Yard 和Mojave 沙漠试验场使用DTM 和Scarecrow 进行了大量的试验,验证不同土壤状况和坡度下两辆车的通过能力,以此评估好奇号在火星上不同地形的通过性。
2013 年5 月1 日,好奇号行驶至盖尔撞击坑,地形为Hummocky terrain。这是一种固结牢固的土壤,与Marsyard 中试验场的粘性沙土地形接近。图9 展示了DTM 在Marsyard 试验场数据与好奇号在火星上的数据,由图可知在小坡度的情况下,地面模拟试验和好奇号在火星上的实测数据比较接近。
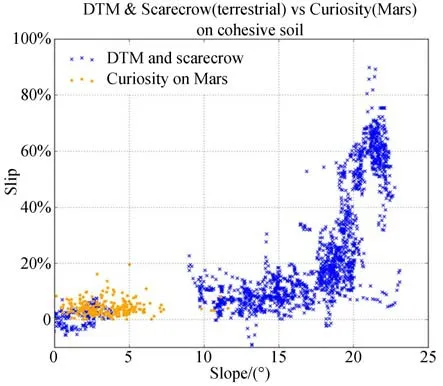
图9 地面与火星数据对比Fig.9 Comparison of Earth and Martian data
好奇号在火星上的实测数据表明,地面模拟试验可以准确评估火星车通过性,通过大量的地面试验,控制人员了解了部分地形和坡度对好奇号移动性能的影响,增加了好奇号的探索范围。
4.3.2 火星地形的影响
JPL 团队为了分辨好奇号所经过火星表面的地形和地貌,通过机器学习中的随机森林算法,建立火星表面地形分类器[34],判别好奇号火星车周围的地形,并将地形分为5 种:沙地(Sand)、松散岩石地(Loose rock)、岩基地面(Bedrock)、尖角石块地面(Angular embedded rock)和圆角石块地面(Round embedded rock),如图10 所示。
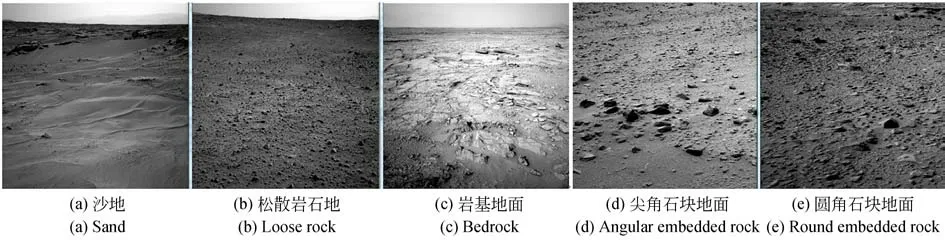
图10 火星表面五种地形Fig.10 Five terrain types of Mars
在此基础上,JPL 团队开发了火星车风险预测工具包和路径规划软件。在路径规划时,分类器将火星车周边地形进行分类,并将分类信息导入规划软件,操作者可以指定需要避开地形。
在2013 年10 月2 日(sol 411),地面控制人员通过图片发现好奇号左前轮轮刺和轮辐之间的轮面区域出现了破洞。统计表明,好奇号车轮的损坏形式主要包括凹坑、刺穿和撕裂[35-38],中间两个车轮累计撕裂长度最大,其次为左前轮,这三个车轮的累计撕裂长度都已经超过2 m;左后轮和右后轮损伤最小,接近于0 m;右前轮介于中间,撕裂长度在0.5 m 左右。好奇号在整个行驶过程中,向前行驶了约9 km,向后行驶了约3.5 km。
为了提高好奇号的使用寿命,NASA 和华盛顿大学的科研人员基于地形对车轮的损伤程度对好奇号已通过地形进行了更详细的分类[39],如如图11 所示,共分为9 类:平原(Smooth plains)、岩海(Rocky sand drift)、板状岩石地面(Platy outcrop)、少量尖锐岩石地面(Subdued outcrop)、不规则尖角石块地面(Irregular sharp outcrop)、密集岩石平原(Rock-strewn plains)、沙丘和波纹(Ripples and dunes)、薄板岩石(Thinly plated outcrop)地面和粗糙片状岩石(Rough platy outcrop)地面。根据研究人员的估计,按照新的路径规划和行走策略,好奇号车轮还能行驶10 km。

图11 好奇号在不同路面行驶车轮损伤情况Fig.11 Wheel damage of Curiosity on different terrains
在为好奇号规划的新的行驶路径中,其中一条便是使得好奇号从多岩石的平原地区驶离,并在火壤覆盖较多的山谷行驶,即增加在沙丘和波纹地面(Ripples and dunes)的行驶距离,这种地面虽然不会对车轮产生损伤,但会产生滑转和沉陷。
为了解波纹沙丘地面通过性,华盛顿大学(圣路易斯)、麻省理工大学和JPL 联合,通过地面模型车(Scarecrow test rover)试验、土槽试验[40](MIT soil-bin test)和仿真分析[41](Artemis)研究了好奇号在波纹沙丘地面的通过性能,如图12 所示。
图12(a)的土槽实验室位于MIT 地面力学实验室,主要用于测试滑转率与沉陷关系,试验条件包括:轮上载荷、角速度、土壤类型等。图12(b)的试验采用好奇号的模型车Scarecrow,该模型车与好奇号具有相同的移动系统。图12(c)的Artemis 仿真软件基于传统地面力学理论,并考虑了轮刺的影响,是在多刚体动力学软件Adams基础上开发而成,并通过MIT 土槽试验进行可靠性验证。

图12 好奇号波纹沙丘通过性研究Fig.12 Trafficability of Curiosity on ripples and dunes
4.4 毅力号和祝融号
毅力号和祝融号于2021 年先后登录火星,探测任务初步展开,两辆火星车在火星上行驶距离较短,对于两辆火星车在火星上的通过性研究还需要进一步分析,本文对两辆火星车的结构创新和技术改进方面加以讨论。
毅力号被称为好奇号的“孪生兄弟”,如图13所示。毅力号火星车在研制过程中使用了好奇号大多数备用部件,包括核能发电机、车轮、底盘及着陆系统[42-43],结构跟好奇号相似。同时为了避免出现类似好奇号车轮破损的情况[44],研究人员对车轮进行了相应的改进,包括增大轮辋厚度,增大直径,减小宽度[45],这样使得毅力号可以适应更为崎岖的路面。

图13 毅力号火星车Fig.13 Perseverance Mars rover
相比于好奇号,毅力号自主导航程度有了较大提高[46],在好奇号的基础上,毅力号自主导航(AutoNav)系统引入了增强导航技术,可以更精确地预测危险,同时毅力号配备了专门用于自主导航和路径规划的视觉计算元件(VCE),与主计算机可以并行使用,这使得毅力号具备连续自主导航能力,提高了毅力号通过性评估的准确性。毅力号自主导航如图14 所示,相比于好奇号,毅力号自主导航在地形三维重构、路径规划和计算速度上都有了极大提高。
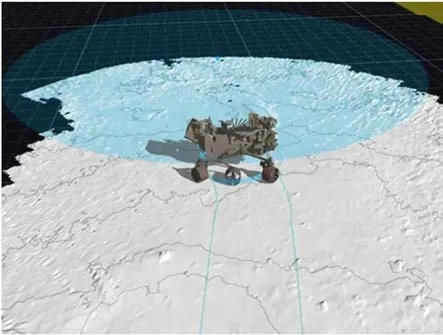
图14 毅力号自主导航Fig.14 Self-navigation of Perseverance
此外,毅力号所搭载的“小机灵”无人机也将为毅力号勘察预期30 天的最佳行驶路线以及探索毅力号无法抵达的区域[47]。毅力号桅杆导航相机中间和车体左侧还装有麦克风,用于获取火星地面环境声音,同时也可以记录毅力号行驶时驱动电机的声音,在某些情况下,声音可以帮助地面专家判断毅力号的行驶状况[48-49]。
需要说明的是,毅力号通过性判断主要还是依赖地面专家团队进行,毅力号共搭载23 个相机镜头,其中有9 个与导航和路径规划相关,所配备的桅杆变焦相机系统,可以轻松快速地对周围环境进行3D 成像,地面操作人员通过特制的3D 眼镜可以查看毅力号周围环境,这项技术之前同样也被用于好奇号的路径规划中[50]。
为提高祝融号在火面复杂环境下的通过能力,设计者根据祝融号移动系统特点,面对不同坡度状况设计多种爬坡方式,并针对火星薄壳松软地面环境制定了脱困策略[51-52]。
祝融号移动系统设计采用被动摇臂悬架,是目前行星探测车移动系统广泛采用的一种悬架形式,在此基础上,设计人员进行了高通过性悬架设计。当祝融号陷入松软沙土时,可以通过调整各摇臂之间夹角,以蠕动的方式脱离沉陷,如图15 所示。

图15 祝融号蠕动脱困试验Fig.15 Creeping extrication test of Zhurong
高通过性悬架设计可以保证在驱动电机发生故障时,通过调整各摆臂之间的夹角,达到悬空某一车轮的目的,祝融号在此状态下行驶,依旧保持稳定,如图16 为融号模拟车轮失效试验。

图16 祝融号模拟车轮失效试验Fig.16 Simulated wheel failure test of Zhurong
为了避免类似好奇号车轮破损情况的发生,研究人员进行了祝融号车轮跌落破坏试验。如图17 所示,在障碍前方固定直径8 mm,地表长度50 mm 的螺栓,障碍最大高度为200 mm,多次跌落破坏试验均未对车轮和移动系统造成影响。

图17 祝融号车轮跌落破坏试验Fig.17 Drop damage test of Zhurong wheel
除跌落破坏测试外,为验证移动系统极端环境下的稳定性,研究人员模拟火星尖角岩石地形,对祝融号进行试验,如图18 所示,试验过程中实时监控各机构运行状态,结果证明祝融号移动系统在面对极端地面条件下,依旧能稳定运行。

图18 祝融号极端地面条件试验Fig.18 Extreme ground condition test of Zhurong
祝融号优秀的结构设计保证了其在火星上的良好运行。截至到Sol 60,祝融号在火星爬升高度不超过4 m,累计行驶450.9 m,滑转率始终处于较低水平[16],如图19 所示。
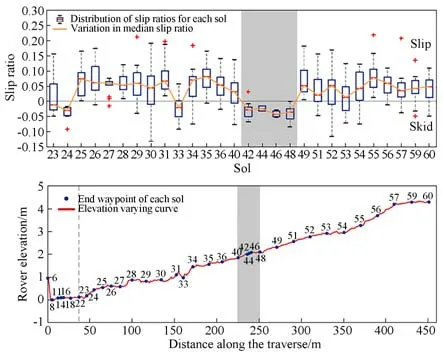
图19 Sol 23-60 祝融号滑转率与行驶里程Fig.19 Sol 23-60 slip ratio and mileage of Zhurong
5 通过性评估新方法
5.1 基于热贯量
热红外成像是传统的深空探测手段,热惯量在行星遥感探测中占有重要地位,2001 火星奥德赛号所搭载的热辐射成像系统(Thermal Emission Imaging System,THEMIS)可以侦测从火星表面辐射的9 个热红外线波段,主要被用于检测火星矿物成分[53]。此外,THEMIS 热辐射成像系统还为机遇号路径规划提供帮助[54],如图20 所示,通过THEMIS 所拍摄的热成像地图,机遇号在前进过程中避开热惯量较高的地区(图中红色区域),而在热贯量较低的地区活动(图中蓝色区域)。THEMIS 热辐射成像系统的空间分辨率较低(100 m/pixel),只能在大范围内辅助判断。不过随着仪器设备的小型化技术不断成熟,好奇号搭载了地面温度传感器(Ground Temperature Sensor,GTS)用于局部地区热惯量检测[55],毅力号也配备了热红外传感器(Thermal Infrared Sensor,TIRS)作为火星环境感知器的一部分[56]。

图20 机遇号在Endeavour 撞击坑行驶路线Fig.20 Opportunity travel route in Endeavour crater
对于土壤来说,热惯量是土壤的一种热特性,它是引起土壤表层温度变化的内在因素,热惯量和火壤的粒度、密实度和颗粒胶结等有直接关系[57]。热惯量公式为,其中:I是热惯量,k是热导率,ρ是表面材料的容重,c是比热容。从宏观角度来讲,热贯量是行星表面对温度变化阻力的度量[57-59],通过分析多光谱红外数据,可以确定土壤的热导率,热导率取决于土壤的容重,进而可以计算土壤的孔隙率,而孔隙率又与土壤的内聚力和内摩擦角有关。
通过热成像进行行星漫游车的非几何危险探测是未来通过性判断方向之一,Cunningham等[60]人根据不同密度颗粒地形热贯量不同的性质,在一天内持续监测松软和紧实的颗粒地形,构建24 h 热惯量拟合模型,提出了一种利用热成像分析确定颗粒地形松散度的方法。
卡内基梅隆大学和JPL 实验室的研究人员,通过在沙土地形上的一系列试验,将热贯量和滑转率联系起来[61],如图21 所示。

图21 热惯量与滑转率Fig.21 Thermal inertia and slip ratio
在此基础上,他们将来源于好奇号机载的地面温度传感器和在轨的热辐射成像系统THEMIS 所探测的热贯量数据同好奇号行驶过程中的滑转率数据相结合,采用混合专家算法来建立热惯量与滑转率模型,将土壤热惯量和滑转率进行对应和分类。如图22 所示,左图为THEMIS数据,右图为GTS 数据,实际数据证明热惯量和滑转率之间有密切联系。

图22 滑转率与热贯量-坡度Fig.22 Slope and thermal inertia versus slip ratio
除了将热贯量信息同滑转率联系外,还可以使用红外图像传感器将热惯量信息同视觉图像融合[62],借助机器学习进行通过性预测。此外,热惯量还可用于月球表面通过性评估,对于月球两极的永久阴影环形山来说,可以通过热成像寻找月球两极阴影地区危险低密度风化层,相关研究证实了其可行性[63]。
5.2 基于深度学习与数据驱动
在利用图像进行路径规划同时,NASA 研究人员也基于图像信息和地面力学理论进行路径寻优,在保障安全通过的前提下,找到能源消耗最少的路径,提出了VeeGer 算法(Vision-based Estimation of Expending and Generating Energy for Rovers)。根据图像信息,对火星车前方路面进行分类和地面力学参数判别,然后计算扭矩和功率[64],如图23 所示。
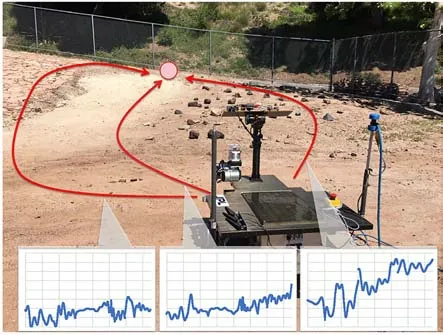
图23 VeeGer 算法路径规划Fig.23 VeeGer algorithm for path planning
对于具有科学意义但探测风险较大的地形,例如岩石较多,地形崎岖的陨石坑。澳大利亚野外机器人中心提出了一种新的地形可穿越性估计算法用于预测在可变地形下火星车的姿态和底盘变化,进而评估火星车通过性[65],其原理如图 24 所示。
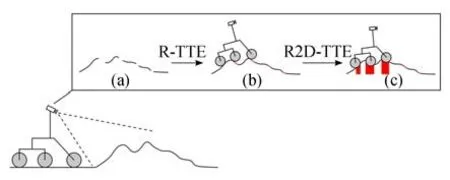
图24 R*-TTE 算法Fig.24 R*-TTE algorithm
除了火星车的通过性预测之外,NASA 针对火星表面开发了基于视觉的地外天体地形分类软件系统SPOC(Soil Property and Object Classification),通过深度神经网络学习人类专家给出的少量实例,得到可以应用于大规模数据分析的学习模型,并在火星科学实验室任务(Mars Science Laboratory,MSL)中得到了验证。该算法使用卷积神经网络(Convolutional Neural Networks,CNN)分类器进行地形分类和滑转率判断,分类器可根据火星车原位信息进行深度学习,并对地形进行可视化分类并估算滑移率[66]。火星2020 火星车任务(Mars 2020 Rover Mission)采用了该算法及其升级算法,如图25 所示。
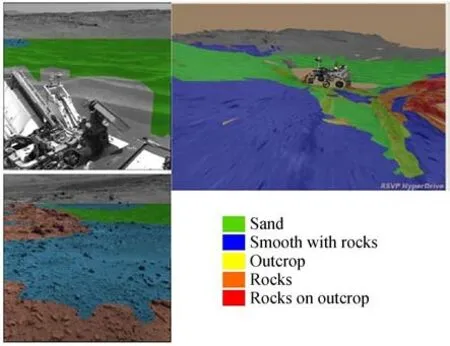
图25 MSL 地形分类器Fig.25 MSL terrain classifier
数据驱动目前在自动驾驶领域被广泛应用。康考迪亚大学和麻省理工大学的研究人员使用数据驱动的方法预测星球车通过性风险[67],通过采集的海量数据,将数据进行组织并形成信息,之后对相关的信息进行整合和提炼,在此基础上经过训练和拟合形成自动化的决策模型。他们建立了一个ASAS 数据驱动模型,时刻检测并预测火星车行驶时的滑转率,当新的情况发生,即新数据输入的时候,系统可以用前面建立的模型以人工智能的方式直接进行决策。如图 26 所示,绿色表示低风险,黄色表示中等风险,红色表示高风险。从图中可以看出,预测值随着滑转率数据的采集而不断发生变化。

图26 ASAS GUI 滑转率预测Fig.26 ASAS-GUI slip prediction
6 结论与展望
火星车通过性评估技术在不断发展的过程中已逐渐形成多学科交叉、多传感、多信息融合的智能化模式,随着车载计算能力的不断提高,自主导航技术被广泛应用,新兴的通过性评估方法不断涌现。
我国即将开展天问2 期火星探测,对于未来的火星车通过性评估,我们应当重视智能通过性评估的能力,即在现有的软硬件条件下,发展线上的多信息融合通过性评估方法,同时线下结合机器学习进行火星地形分类、非几何危险预测、火壤参数反演等研究。为未来实施智能火星车研制、通过性评估和路径规划提供理论依据和数据参考。
