基于机载LiDAR点云的电力线提取与三维重建
2023-04-06宋向荣
宋向荣
(中交第三航务工程局有限公司宁波分公司, 浙江 杭州 315200)
0 引言
近年来,以电力行业为代表的我国各类民生类基础设施也在不断建设,规模日益壮大。为了保障人民用电供应,针对电网结构的电力线周期性安全巡检具有重要意义。传统的电力线周期性安全巡检主要有两种方式,一是通过地面人员肉眼观测,二是搭载直升机平台通过设备进行观测[1-2]。传统的电力线周期性安全巡检存在成本高、作业难度大、巡检结果不可靠等现实性问题、机载激光(light detection and ranging,LiDAR)系统作为一种新型的空间数据采集手段,集成了激光测距系统等多种子系统[3],能够在短时间内快捷、高效获取目标地物表面高精度三维坐标信息[4],对于复杂区域电力线巡检的优势巨大。然而,电力线周围通常生长高大树木以及人工建设建、构筑物,机载LiDAR点云数据中包含上述地物点云,若要实现基于机载LiDAR扫描技术的电力线巡检,研究如何区分电力线点与其他地物点具有重要的现实意义。
针对基于机载LiDAR点云数据的电力线提取与三维重建,众多学者进行了研究。程宇航等[5]利用深度学习实现电力线提取,但是该方法使用训练样本少、训练过程复杂,提取效果一般;朱依民等[6]通过局部高程直方图模式进行塔杆点、电力线点分类,但是该方法受区域大小影响大,具有较大的局限性;蔡岐彬等[7]通过高程阈值分割算法实现电力线点、其他地物点分类,避免单一高程阈值对分类结果的影响,但是算法复杂性较大;考虑地形起伏的特征的自适应的点云滤波方法,在滤波结果的基础上利用维度特征剔除非电力线点,再基于Hough变换实现单根电力线提取的方法在提取电力线点过程中涉及图像转换,一方面降低分辨率,另一方面无法避免噪声对提取结果的影响;MCLAUGHLIN R A[8]结合统计分析法和电力线的悬线模型实现电力线三维重建,但是再确定电力线走向时会受粗差点影响;BAMIGBOLA O M等[9]基于点云的三维尺度邻域特征使用支持向量机对电力线走廊点云进行分类,但是该方法需要过多的人工干预,且方法的分类准确率、鲁棒性都较低。
本文根据电力线点在机载激光LiDAR点云数据中与其他地物点分布差异性,提出一种高效、高精度电力线点提取与三维重建方法,通过电力线点粗提取、单根电力线点精提取以及电力线三维重建这三个步骤实现本文技术方法。首先,使用改进的点云滤波方法对原始机载LiDAR点云进行滤波处理,其次通过改进几何特征计算方法提取电力线点得到电力线粗提取成果,并引入密度聚类原理精确提取单根电力线,最后通过最小二乘原理实现电力线三维重建,构建完整的电力线提取与三维重建流程。
1 技术流程
1.1 点云数据预处理
对于原始无人机载LiDAR点云数据,为了避免噪声点、多次回波现象产生多余点对后续电力线点提取产生影响,需要对原始机载LiDAR点云数据进行处理,包括噪声点剔除与回波次数判断[10-11]。机载激光LiDAR扫描系统作业时,由于空气中存在悬浮点、飞鸟等,造成扫描点云数据中包含噪声点,本文结合高程分布直方图与k维树的方法剔除噪声点。激光LiDAR扫描系统进行数据采集时,由于激光脉冲具有穿透力,对于多类地物会产生多次回波现象,可根据回波次数的差异性剔除部分非地面点。
1.2 改进电力线点云滤波算法
目前常用的机载LiDAR点云滤波算法主要有基于曲面拟合、基于形态学等滤波算法[12-13],本文考虑基于曲面拟合的点云滤波算法在地形起伏较大区域具有良好性能的优势,将该滤波算法用于本文机载LiDAR点云滤波中,同时为进一步提高点云滤波效果,在该算法的基础上引入格网划分的概念,提出一种改进曲面拟合滤波算法,技术路线如图1所示。
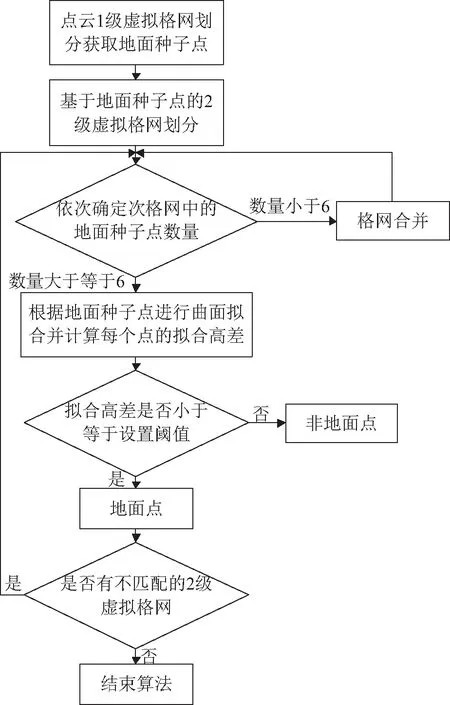
图1 改进曲面拟合滤波算法技术路线
具体步骤为:
1)将点云场景中建筑物最大尺寸作为格网大小进行1级虚拟格网划分,取各格网内最低点为地面种子点。
2)对地面种子点进行2级虚拟格网划分,统计落入每个格网内地面种子点数,若地面种子点个数不少于6,则进入步骤4),若地面种子点个数小于6,则进入步骤3)。
3)将当前格网内种子点与下一格网内种子点合并,直至地面种子点个数不少于6。
4)利用地面种子点进行最小二乘曲面拟合,计算待判断点拟合高程与实际高程差值得到拟合高程差。
5)设置高差阈值,若拟合高程差小于阈值,标记待判断点为地面点。
1.3 电力线点云提取
完成地面点滤波处理后,得到包含电力线点以及部分塔杆点与高植被点的非地面点,其中高植被点呈不规则散乱点分布,杆塔点局部范围内呈规则面状分布,根据电力线点、高植被点以及杆塔点的空间分布特征差异进行电力线点提取。对于激光点的空间分布特征,可通过邻域内点集协方差阵对应特征值λ1、λ2、λ3进行表现,如果满足λ1≅λ2≅λ3,表明目标点为植被等分布不规则的点;如果满足λ1≅λ2≥λ3,表明目标点为杆塔或道路等呈面状分布的点;如果满足λ1≥λ2≅λ3,表明目标点为道路边线或电力线等呈线性分布的点。
受点云分布密度影响,若通过固定邻域半径进行特征估计增加点云分割误差,本文引入熵函数最小化原则[14],通过计算激光点特征值并确定激光点3种维数的概率维度特征
(1)
根据香农熵定义得到激光点邻域包含信息为[15]
Ef=-a1DLn(a1D)-a2DLn(a2D)-a3DLn(a3D)
(2)
式中,Ef表示该激光点邻域所含信息,在Ef最小值时取得最佳邻域半径。计算特征值以及判断激光点特征值之间的相互关系进行电力线提取。其中半径增量、邻域半径区间与计算机性能与点云数据量有关。
1.4 单根电力线分离
密度聚类算法(density-based spatial clustering of application with noise,DBSCAN)是一种高密度联通区域聚类方法[16],该算法能够在噪声分布与数量未知的情况下实现任意形状簇类的搜索,高算法的主要定义为:①输入参数一pMinPts为密度阈值,输入参数二rEps为球邻域半径。②对比当前点rEps邻域范围内包含点的数量与pMinPts判断当前点属性,点属性包括噪声点、边界点、核心点。③密度可达,若p为核心点且点p的rEps邻域中包含点q,称q为p直接密度可达。
DBSCAN算法原理如图2所示,当pMinPts为3、rEps为4时,黑色填充圆为噪声点、白色填充圆为边界点、灰色填充圆为核心点。
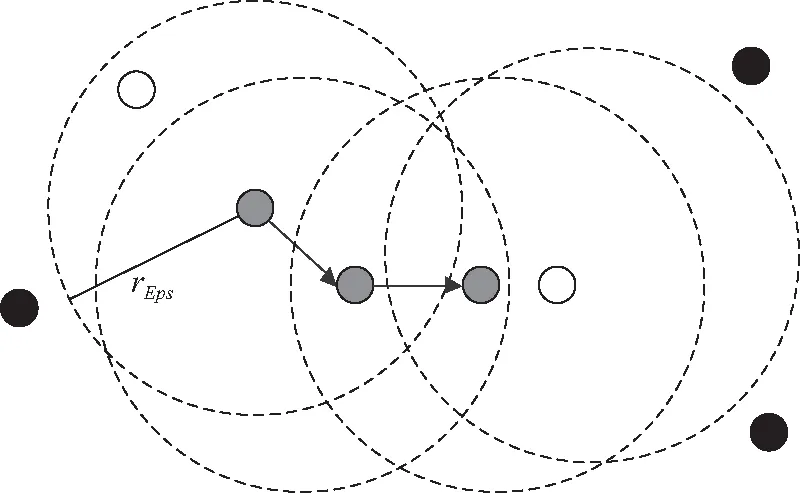
图2 DBSCAN算法原理图
DBSCAN算法通过判断核心点实现簇列的搜索,将满足条件的点不断加入簇列中,基本描述如图3所示。
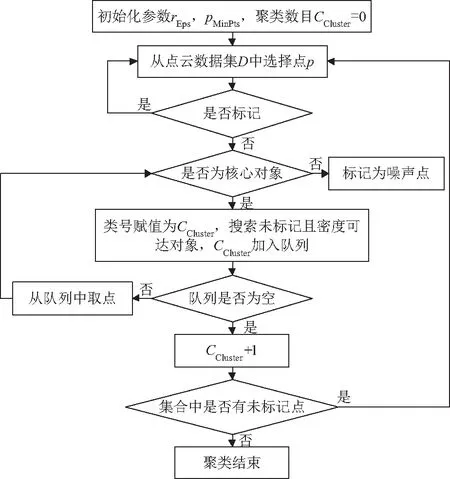
图3 DBSCAN算法流程图
DBSCAN算法的具体实现步骤为:
1)初始化参数pMinPts、rEps,将点云Flag属性赋值为unvisited,CCluster赋值为0。
2)选择某点p并确定其Flag值,若Flag值为unvisited,判断其是否为核心点,若Flag值为visited,选择下一点。
3)对比目标点rEps邻域内对象点数与阈值pMinPts大小,若小于阈值pMinPts,则目标点为噪声点,若大于阈值pMinPts,则目标点为核心点,通过目标点密度可达点建立密度连通集并将点集内点Flag赋值为visited。
4)重复上述步骤直至所有点Flag值为visited。
5)聚类完成并输出簇集合。
完成聚类后,原始电力线点云被分类为若干根独立电力线点云。
1.5 电力线三维重建
电力线三维重建即通过矢量形式表现电力线点,利用抛物线方程可近似地表示电力线数学模型[17],常用的拟合方法有RANSAC算法拟合、最小二乘原理拟合等[18-19],其中RANSAC算法拟合需消耗大量内存,拟合结果具有较大的偶然性;最小二乘原理拟合算法拟合结果稳定性高,本文选择使用该方法进行拟合,实现电力线三维重建。
空间直线的点向式方程为
(3)
式(3)中,x0、y0、z0为直线已知点;m、n、p为直线方向向量。
通过空间点Q1(x1,y1,z1)与空间点Q2(x2,y2,z2)组成空间直线,任意一点P(x,y,z)与该空间直线的距离为
(4)
式(3)可转换形式为
(5)

(6)
通过式(4)可以将空间直线投影至XOY、YOZ、XOZ平面中,将6个几何参数转换为4个几何参数。

(7)

(8)

(9)
令
(10)
那么式(9)可简化为
MMTA=MX,MMTB=MY
(11)
式中,A=[ab]T;X=[x1…xm]T;B=[cd]T;Y=[y1…ym]T。
2 实验验证
2.1 实验数据
为了检验本文提出基于机载LiDAR点云数据的电力线点提取与重建方法,选择宁波市某高压交流输变电工程中部分实测机载LiDAR点云数据进行实验。实验数据由D300L机载激光LiDAR系统采集得到,该系统搭载Riegl mini VUX-1UAV激光LiDAR扫描仪,水平分辨率为0.05°~0.5°,测量距离为250 m。本文实验数据共包括6个电塔,28根电力线,同时包含植被、树木等地物,如图4所示。
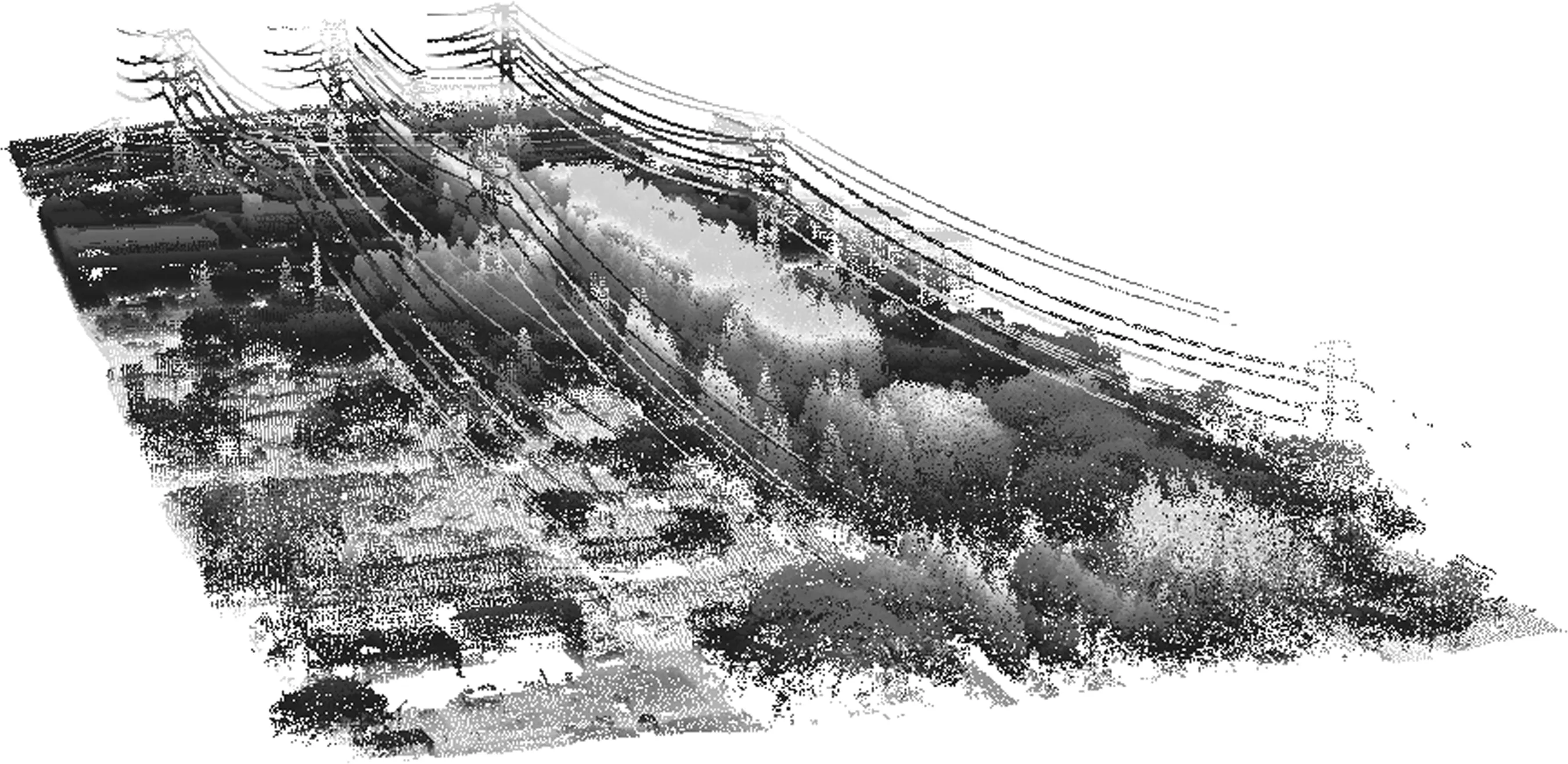
图4 原始点云数据
2.2 实验结果与分析
对预处理后点云数据进行两次滤波,改进曲面拟合滤波算法滤波过程中,设置1级格网边长为10.5 m,根据地面种子点数以及式(1)设置2级格网边长为26 m,设置高差阈值为0.5 m,经两次滤波得到非地面点如图5所示。
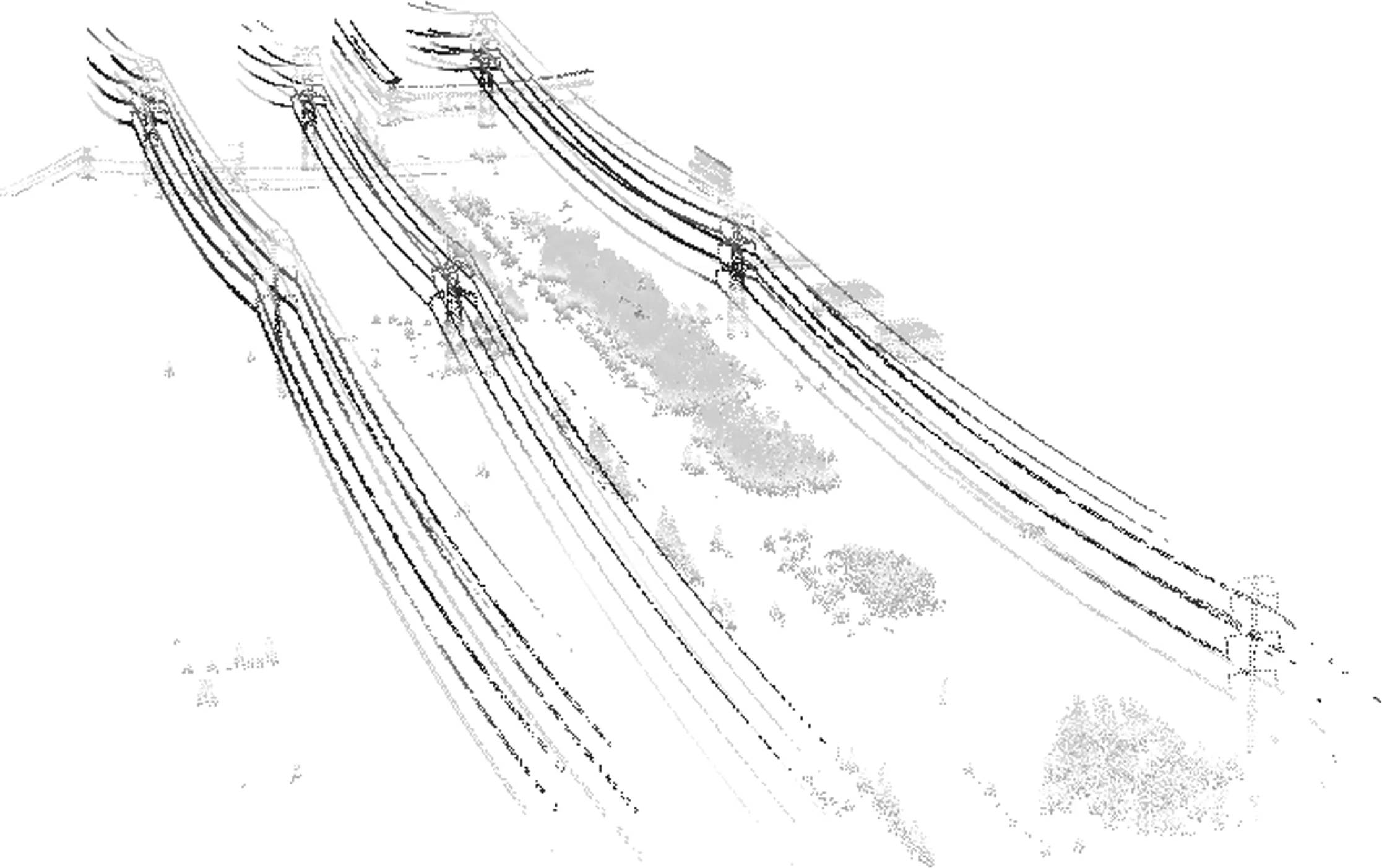
图5 点云滤波结果
通过图5可知,经两次滤波后,大量的地面点、道路点、低矮植被以及与地面连接的塔杆点被剔除,保留了完整的电力线点,取得了很好的点云预处理效果。
基于维度特征进行点云分割,并通过密度聚类方法进行单根电力线提取。单根电力线分离算法对于参数的选择较为敏感,根据电力线分布情况确定最优参数,通常的取值范围为12~18,取值略小于相邻电线间的最小距离。通过试验可知,当取值15、取值2时得到正确的聚类结果,此时聚类数目CCluster=9。单根电力线提取结果如图6所示。通过图6可知,本文提出的改进自适应邻域搜索特征值计算方法能够对点的维度特征进行准确表达,实现电力线的有效提取,并且通过密度聚类方法提取到完整的单根电力线结果。

图6 单根电力线提取结果
通过最小二乘原理对单根电力线点进行曲线拟合,实现电力线三维模型重建,结果如图7所示。
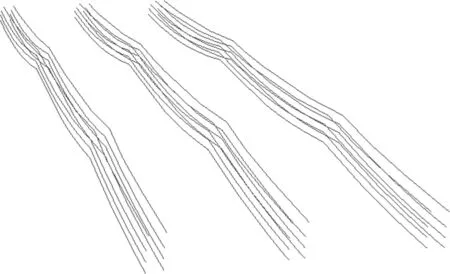
图7 单根电力线三维重建结果
为定量分析本文提出电力线点提取的有效性与准确度,通过第三方点云数据处理软件手动提取电力线点结果作为参考值,统计电力线点提取误差率、拟合残差最大值[20-21]作为指标进行精度评价,统计结果如表1所示。

表1 电力线提取与拟合精度统计
通过表1可知,本文方法提取电力线结果的误差率几乎为0,拟合残差最大值为0.254 m,电力线点分布在拟合对象所在半径范围内,曲线拟合残差越小,表明模型重建精度越高。
3 结束语
本文根据电力线点在机载LiDAR点云数据中的空间分布特征,设计并实现了一套电力提取与三维重建方法。首先使用两种滤波方法对原始点云数据进行滤波处理,并利用维度特性进行电力线提取以及使用密度聚类算法实现单根电力线分离。利用实际输电线路点云数据进行算法实验,结果表明本文方法能够提取完整电力线结果,并实现单根电力线的有效分离与三维重建,自动化程度高。对实验结果进行精度评价,验证了本文算法在电力线点提取与重建方面的准确性与稳健性,能够满足实际工程需要。本文的研究成果可用于大规模复杂环境的输电线机载LiDAR点云数据处理中,对于电力巡检等项目工程具有一定的实用价值。