公路病害精准检测机器人在工程中的应用
2023-04-04刘宪明钟新然
刘宪明,闫 晨,杨 睿,钟新然*
(1.山东高速工程检测有限公司,济南 250003;2.山东高速股份有限公司,济南 250014;3.上海圭目机器人有限公司,上海 200433)
公路是支持国家经济发展与社会进步的重要基础设施,随着近几十年国民经济的快速发展,国家在道路建设方面的投资已逐渐趋于顶峰,从而整个交通行业即将面临由“建”转“养”的格局变化。随着公路运行时间及交通荷载的增长,公路表观和内部结构病害发展趋势加快,而大多数行车事故都直接或间接因道路病害长期积累与恶化而致,同时大量高能耗、高成本的公路维修工程也是因为道路病害恶化而被动实施,造成大量的资金和人力资源浪费。目前,传统的公路检测手段主要依赖人工(人工目视、人工手持仪器检测)、半自动(车载仪器检测)手段,存在着效率低、主观性强、工作强度大、数据精度差等诸多问题。因此,实现更高效、更精准地病害检测对公路状况评价、维修养护决策具有重要意义。
近年来,国内外学者及工程师对公路病害自动化检测技术进行了大量的研究及实践探索。崔国丽[1]提出了基于立体的交向拍摄测量结构的公路路面损坏裂缝自动检测技术,通过立体双目相机交向拍摄测量,获取路面裂缝病害信息。黄建斌[2]针对高速公路路面检测速度较慢的问题,以线阵相机作为核心,实时获取高速公路破损原始数据,并通过光照均匀化、交通标记线去除等图像预处理算法,实现病害检测。周游佳等[3]研发了基于三维检测技术的道路综合检测车,可快速采集路面灰度图像和横断面三维高程数据并识别裂缝、车辙、坑槽等常见公路表观病害。庞静等[4]研制了基于车载摄像头的高速公路病害自动检测系统,并利用深度学习技术进行公路表观病害的自动检测及分类,并通过云端管理系统进行病害管理、统计及规划,提升高速公路病害检测及管理的效率及准确度。此外,加拿大FURGO ROADWARE 系统、澳大利亚ARRB 系统、美国DHDV 和PATHWWAY 系统[5]、中国的CiCs[6]等产品化的公路综合检测车也开始逐步应用于公路检测作业。总体而言,目前已有的大多数公路病害自动检测技术都是依托车载检测装备,相较于人工作业方式其检测效率已有显著提高,但在自动化程度、数据密度和数据定位精度上还有待进一步提升。
为了进一步提升自动化、智能化的公路病害精准检测水平,本文依托公路智能检测机器人系统,利用搭载的相机和三维地质雷达模块自动采集公路路面表观与内部结构数据,从而实现公路全结构、全断面的精准病害检测。依托山东省内某国道公路检测项目开展现场测试及工程应用,验证技术有效性。
1 公路病害检测机器人系统
公路病害检测机器人系统架构如图1 所示,机器人系统由数据采集作业系统、数据处理与信息管理系统、远程监控与辅助系统组成。数据采集作业系统包括四转四驱智能机器人平台、表观视觉检测模块、三维探地雷达检测模块、任务规划器、机器人遥控器和机器人远程监控系统。数据处理与信息管理系统包括数据处理与病害分析软件、路面病害信息管理软件。远程监控与辅助系统包括多功能运输车、远程控制台。
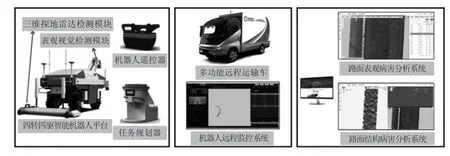
图1 道路检测机器人系统总览
在道路检测任务中,检测机器人以自主检测作业的方式,利用搭载的表观视觉检测模块及三维探地雷达检测模块分别采集检测区域内的道路表观图像和内部结构数据,并结合高精度定位信息生成检测区域道路表观和内部结构三维模型。最后,数据分析工程师依据JTG 5210—2018《公路技术状况评定标准》[7]并结合基于深度学习的病害识别算法进行检测数据分析,可直观、快速获取道路表观及内部结构病害。
2 基于公路病害检测机器人的现场应用技术
2.1 现场作业流程
为了保证公路病害检测机器人正常开展作业,制定了详细的现场作业流程,如图2 所示。在现场踏勘、确认检测区域后,现场作业工程师确认交通组织及封路正常,即可开始现场作业。现场工程师根据作业区域实际面积,采集检测区域坐标并在远程监控系统中设置检测任务,随后将该检测任务发布到机器人平台。现场工程师在机器人作业过程中可通过远程监控系统查看机器人当前的工作状态和数据采集状况。任务结束后,确认数据采集完整即可回收设备,撤离现场。
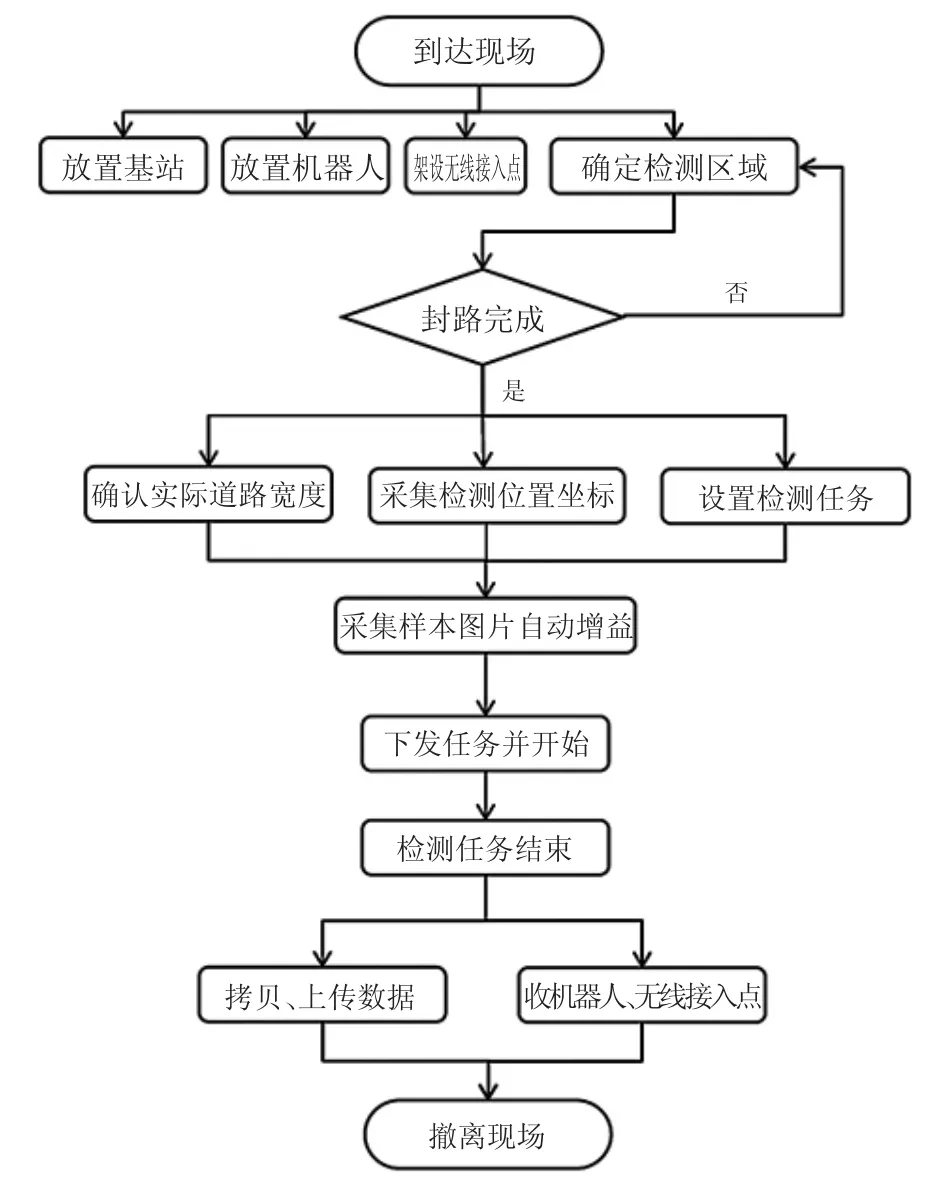
图2 现场作业流程图
2.2 公路路面结构数字化实景建模
现场检测工作结束后,将采集的图像及雷达数据输入数据处理与信息管理系统,利用图像拼接算法一键生成整体公路路面实景图,如图3 所示。
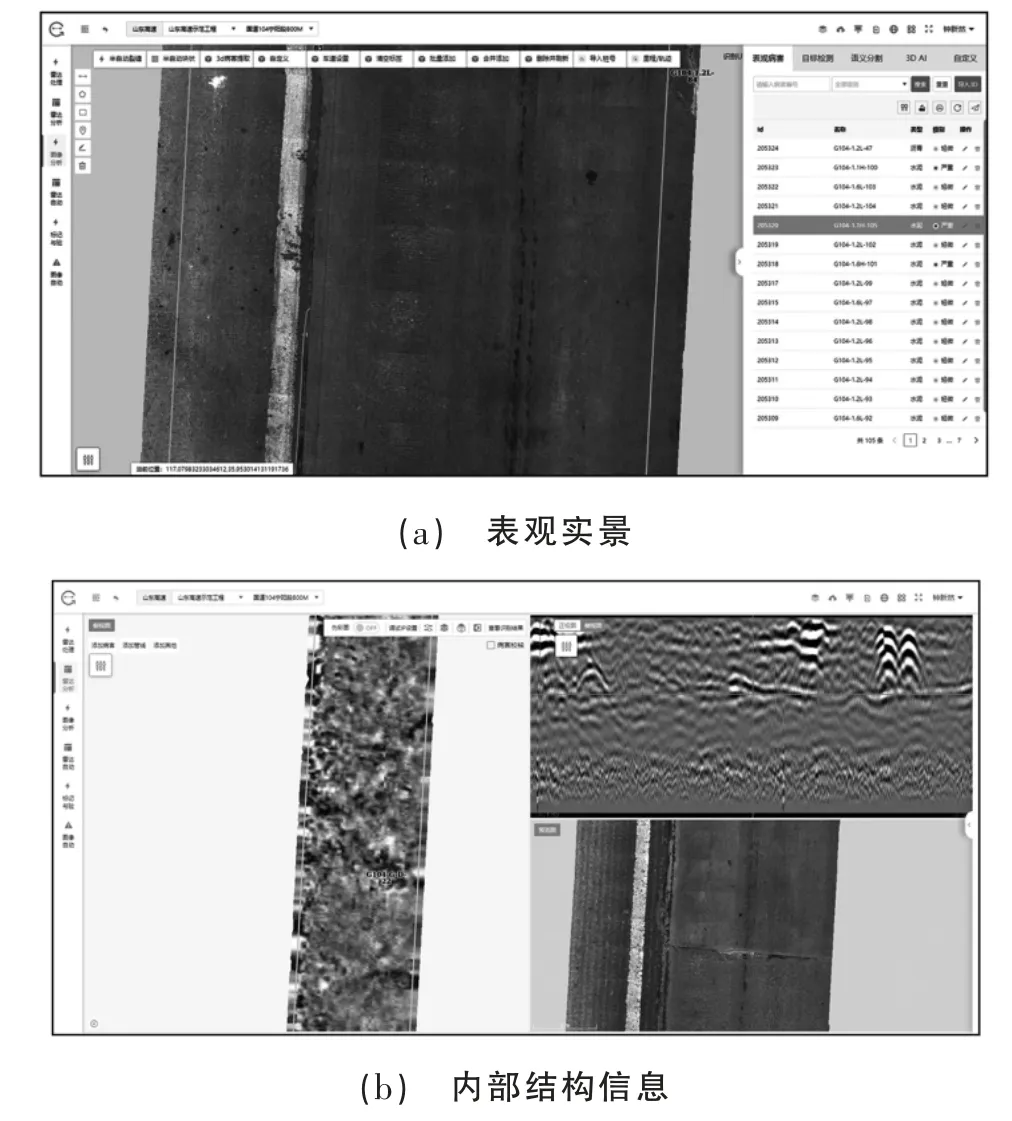
图3 道路数字化建模
此外,利用位置对齐的图像和探地雷达数据,可实现对路面同一位置的表观病害和内部结构病害融合分析。
2.3 公路病害分析及评价方法
2.3.1 表观病害分析及评价
在实景模型上鉴别路面损坏类型,利用病害圈定功能标注病害。系统自动统计病害类型、病害编号、损坏程度、病害尺寸和病害坐标等。表观病害观测精度±1 mm。评价指标参照JTG 5210—2018《公路技术状况评定标准》。
2.3.2 内部结构病害评价
基于探地雷达波特征的地下病害的识别方法一般是根据正演规律推断某些病害特征的波形、振幅、相位与频率的变化等,然后根据现场探测得到的波来反演路面内部形态,辅以水平切片的直观形态,对结构病害做精确、详尽地判断[8]。
依据JGJ 437—2018《城市地下病害体综合探测与风险评估技术标准》[9],脱空、空洞、富水体、裂缝和沉陷不分影响程度,仅有疏松体分为“一般”和“严重”2 个等级。
3 公路检测现场验证及工程应用
3.1 工程背景及工程概况
本工程主要检测路段为山东省内G104 国道某路段,K558+660~K558+900 下行行车道,其中有跨线桥跳过40 m,K552+500~K552+750 上行行车道,共计450 m,检测面积为1 580 m2,检测区域如图4 所示。针对该区域路段开展智能机器人自动病害检测试验,测量表观病害位置和尺寸信息作为基准,将机器人检测结果中表观病害信息进行对比,验证其结果准确性。机器人现场作业情况如图5 所示。
图4 检测路段

图5 机器人现场作业情况
3.2 现场检测结果
3.2.1 路面表观病害检测
本次检测路段的2 个区域分别为水泥混凝土路面和沥青路面,表1、表2 分别为2 个区域的路面表观病害详细调查结果统计。

表1 G104 调查区域K552+500~K552+750 段路面损坏统计表

表2 G104 调查区域K558+660~K558+900 段路面损坏统计表
其中,水泥混凝土路面检测出路面损坏45 处,损坏类型包括破碎板、裂缝、边角剥落。其中破碎板面积为315.448 m2。沥青路面检出路面损坏60 处,损坏类型包括龟裂、块状裂缝、纵向裂缝、横向裂缝,路面损坏总长度为79.57 m。检出纵向裂缝17 处,面积为44.253 m2;检出横向裂缝41 处,总面积为35.317 m2;块状裂缝面积为17.628 m2,龟裂面积极小。依据规范要求,裂缝类、条状修补检测结果应用影响宽度(0.2 m)换算成损坏面积。经现场工程师分析比对,检测结果与路面实际状况吻合。
3.2.2 路面内部结构病害检测
经过探地雷达数据和表观图像融合分析,本次检测路段共检出结构病害31 处,损坏的类型为疏松、裂缝、脱空、沉陷。裂缝分布于底基层,总面积为13.820 m2;脱空分布在面层、基层、底基层,总面积为16.791 7 m2;疏松分布在底基层和土基,总面积51.713 1 m2。沉陷分布在底基层和土基,总面积58.901 1 m2。结构病害的统计结果见表3。
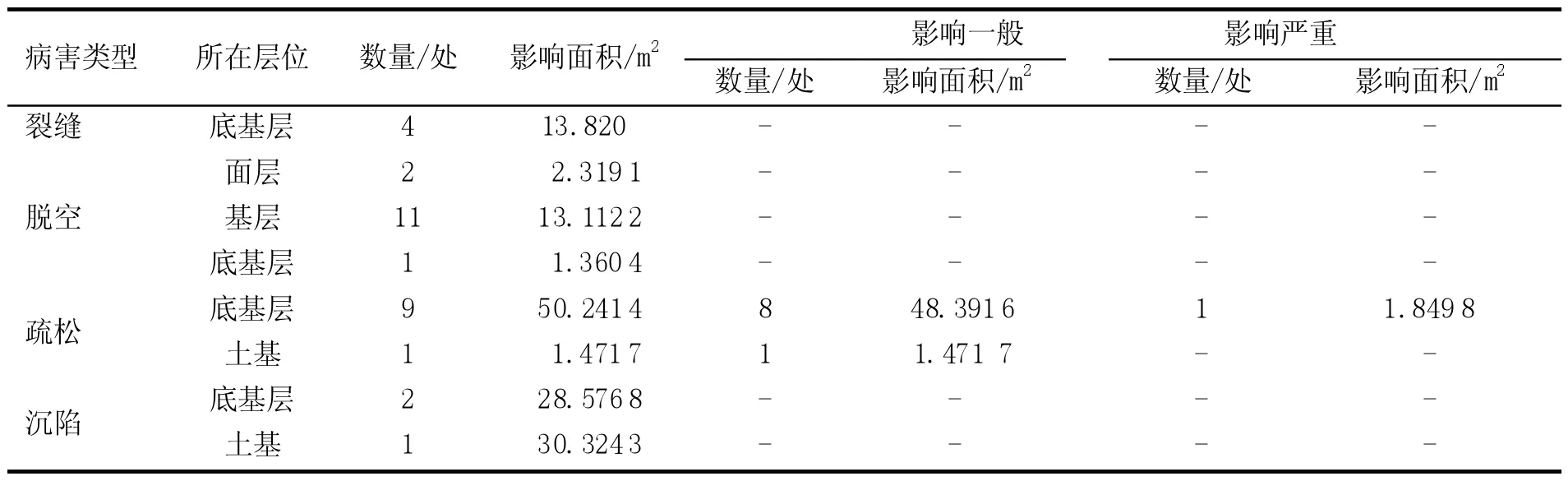
表3 G104 调查区域结构病害统计表
4 结束语
公路病害检测机器人具有自动采集数据、自主定位导航、全覆盖的特点,在实际作业中无需人工操作控制,2 名现场工程师即可完成现场作业。公路病害检测机器人搭载的路面表观视觉检测模块和三维探地雷达模块可以实现全覆盖、全结构的路面数据采集,为路面表观病害和内部结构病害分析提供了高质量、高精度、位置对齐的检测数据。此外,利用数据处理与信息管理系统可以实现路面数字化实景建模及各类病害的原位绘制与详情统计,有助于管理单位对路面技术状况进行研判,并为后续维修养护决策提供数据支撑。依托山东省内的国省道公路检测项目,基于机器人的公路病害精准检测技术得到了测试验证和工程应用,进一步证实了该技术的有效性和先进性。
