基于局部建模方法的卧式柔性清土辊性能优化
2023-03-31徐丽明闫成功谭好超沈聪聪
牛 丛,徐丽明,闫成功,谭好超,沈聪聪,马 帅
基于局部建模方法的卧式柔性清土辊性能优化
牛 丛,徐丽明※,闫成功,谭好超,沈聪聪,马 帅
(中国农业大学工学院,北京 100083)
针对基于整体建模的卧式柔性清土辊性能优化方法存在仿真成本高的问题,该研究提出一种局部预测整体的建模方法,既降低仿真计算量,同时可以对柔性清土辊进行优化设计。首先,提取柔性清土辊的最小结构特征,并基于几何相似性原理构建整体性能预测模型。其次,基于离散元法(Discrete element method,DEM)与多柔性体动力学(multi-flexible-body dynamics,MFBD)耦合仿真技术优化求解最小特征结构的最优作业性能。最后,依据预测模型估算柔性清土辊的整体性能。柔性清土辊的清土率和阻力矩与其刷片数量的线性拟合决定系数分别为0.987和0.99。基于局部建模方法和EDEM-RecurDyn耦合技术建立最小特征结构与土壤互作模型,其接触计算量仅为整体建模方法的8%左右。前进速度、安装角、轴向长度和叶片锥角对最小特征结构和刷片的作业性能影响显著,仿真优化结果分别为0.3 m/s、30°、50 mm和0°。上述条件下最小特征结构的清土率和阻力矩为36.87%、18.91 N·m,单个刷片的清土率和阻力矩为2.80%和2.78 N·m,最小特征结构的物理试验结果与仿真结果的相对误差为3.74%和10.15%,单个刷片的物理试验结果与仿真结果的相对误差为10.36%和9.71%。预测模型估算的柔性清土辊的清土率和阻力矩分别为97.07%和78.68 N·m;物理试验结果与预测模型估算结果的相对误差为7.84%和4.55%;整体建模方法优化结果与局部建模方法优化结果的相对误差为10.66%和6.76%。研究结果为复杂柔性体与散粒体互作建模提供了思路。
离散元法;建模;葡萄藤;特征提取;清土;耦合仿真
0 引 言
传统埋土防寒模式下,中国北方葡萄春季清土环节存在人工劳动强度大、成本高,采用刚性清土部件实施机械化清土导致的清土率低和损伤藤的问题[1]。柔性清土部件是应对春季清土难题的重要方式[2],柔性清土辊作为其中的典型代表,作业参数对其作业性能具有重要影响[3]。基于田间试验的优化设计方法周期长、成本高,而基于DEM-MFBD耦合的仿真优化设计方法既能准确模拟柔性清土辊与土壤的互作行为,又能有效降低优化成本[4]。基于整体建模的仿真优化方法存在计算速度慢、计算时间长和配置要求高等问题,这严重降低了仿真优化方法的优势。因此,研究加快仿真计算速度的方法具有重要意义。
高计算成本是大规模散粒体颗粒的DEM仿真以及复杂柔性体的MFBD仿真的共性问题,这催生了加快计算速度方法的研究,主要包括采用GPU计算[5-6]、简化接触计算、粒径缩放[7-9]以及几何体模型缩放[10-11]。采用GPU计算升级了计算机硬件配置,能够替代CPU进行一部分图像和图形处理运算[12],但这将增大成本支出,且不适用于个人或小研究团队。简化接触计算和粒径缩放相关研究均从散粒体角度出发,简化接触计算主要通过简化力模型[13-14]、降低粒子刚度[15]以及采用单一尺寸颗粒[16]等加快计算速度,粒径缩放主要通过增大颗粒直径来减少颗粒数量[17]以降低DEM仿真计算量。简化力模型、降低粒子刚度以及粒径缩放方法需要针对不同性质、状态颗粒和不同应用场景修正其他模型参数才能达到相同的宏观响应,方法具有专用性[18]。采用单一尺寸颗粒能够降低接触计算的变异性,是最具有普适性的方法,但在加快计算速度方面效果有限。几何体模型缩放方法通过减少接触主体的单元节点数量减少接触计算。REHMAN等[19]基于相似理论应用1∶16比例的橡胶轮胎装载机模型的DEM模拟结果对1∶8比例的模拟结果进行预测,仅对该方法的有效性作出了验证,且在较大和较小运动速率时预测结果误差较大。几何体模型缩放方法相关研究较少,主要受到时间尺度缩放对模型参数转换的影响,模拟结果的准确性有待进一步验证[20]。综上,已有研究主要从DEM模型的颗粒角度提出加快计算速度的方法,这些方法普遍具有专用性,模型参数的重新标定过程也将带来更大的仿真计算量;少有研究从几何体角度提出加快计算速度的方法。因此,研究从几何体角度减小仿真计算量并规避模型缩放带来的参数转换不明确问题具有重要意义,需要进一步深入研究。
本研究拟从几何体角度出发,结合柔性清土辊的结构和作业过程特点,提出一种局部预测整体的柔性清土辊建模方法,以减少接触计算量,并设计试验验证方法的有效性和准确性,以期为复杂柔性体与大规模散粒体颗粒互作仿真建模提供参考。
1 材料与方法
1.1 结构与参数设置
本研究的建模对象为前期研制的卧式柔性清土辊[3],由刷辊和叶轮组成,如图1所示。刷辊由多个致密刷丝组成的刷片构成,叶轮由多个橡胶板组成的叶片构成。柔性清土辊直径为550 mm,轴向总长为500 mm。柔性清土辊的结构和作业参数对其性能具有重要影响,参数取值范围参照前期研究[3]和文献[21]设置:轴向长度50~100 mm,叶片偏角0°~40°,叶片锥角0°~45°,叶片数量2~6,安装角30°~60°,前进速度0.3~0.8 m/s,转速168~550 r/min。
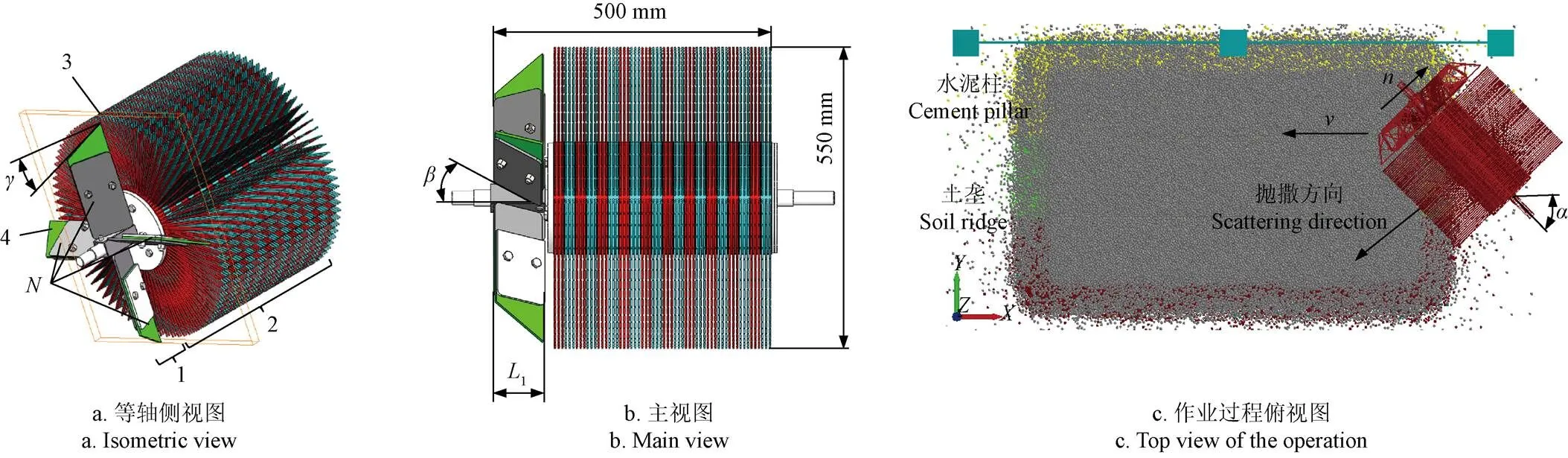
1.叶轮 2.刷辊 3.刷片 4.橡胶板 1.Impeller 2.Brush roller 3.Brush piece 4.Rubber sheet
注:为叶片锥角,为橡胶板末端边缘与中心轴线的夹角,(°);为叶轮的叶片数量;为叶片偏角,为叶片工作面与中心轴线的夹角,(°);1为叶轮轴向长度,mm;n为柔性清土辊转速,r/min;为前进速度,m/s;为安装角,为柔性清土辊中心轴线与前进方向夹角,(°);为前进方向的反方向;Y为土垄宽度方向,在水平面内与方向垂直;为垂直于水平面的方向。
Note:is the blade taper angle, which is the angle between the end edge of the rubber sheet and the central axis, (°);is the number of impeller blades;is the blade deflection angle, which is the angle between the blade working surface and the central axis, (°);1is the axial length of the impeller, mm;nis the rotation speed of the flexible soil-clearing roller, r/min;is the forward speed, m/s;is the installation angle, which is the angle between the center axis of the flexible soil-clearing roller and the forward direction, (°);is the opposite direction of the forward direction;Yis the width direction of the soil ridge, which is perpendicular to thedirection in the horizontal plane;is the direction perpendicular to the horizontal plane.
图1 柔性清土辊结构及作业参数示意图
Fig.1 Schematic diagram of the structure and operating parameters for the flexible soil-clearing roller
1.2 建模方法
针对柔性清土辊整体建模存在计算成本高的问题,本研究结合其结构和作业过程特点,按照图2所示的建模流程,提取柔性清土辊的最小特征结构,拟采用局部建模方法以部分预测整体,从根本上减少接触计算量。
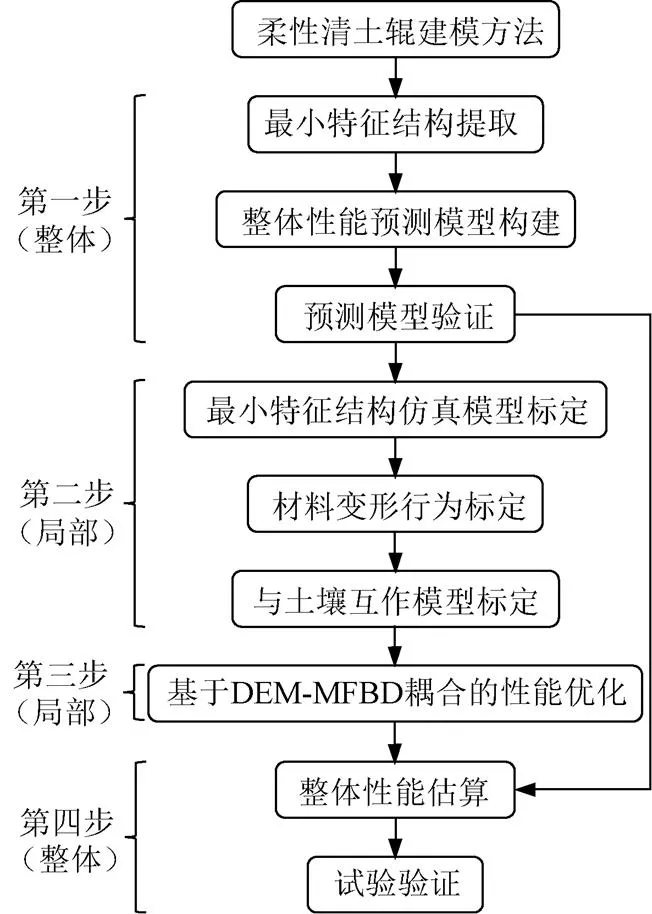
图2 建模流程图
1.3 柔性清土辊整体性能预测模型
1.3.1 提取最小特征结构
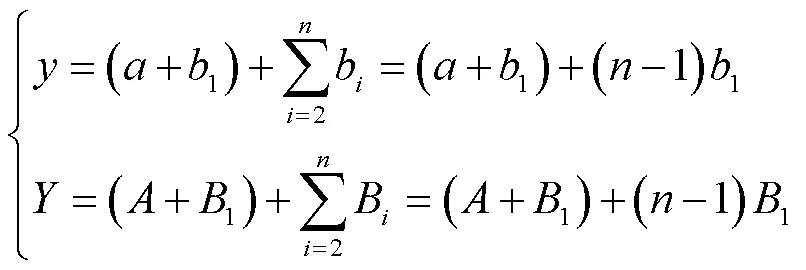
由图3a可知,柔性清土辊结构中,叶轮数量为1,具有唯一性,而刷辊由多个相同刷片构成,具有重复性,而刷片本身具有唯一性,则其结构特点如下:

式中表示柔性清土辊整体结构;表示叶轮;b表示第个刷片;表示刷片数量。
由图3b可知,柔性清土辊作业时,叶轮的清土区域与其他部件均不相同,具有唯一性,刷辊中多个刷片的清土区域均相同,具有重复性,而单个刷片的清土区域具有唯一性,则其作业特点如下:

式中表示柔性清土辊的清土区域;表示叶轮的清土区域;B表示第个刷片的清土区域。
综合柔性清土辊的结构和作业区域所具有的几何相似性特点,对柔性清土辊进行特征提取,分离出具有唯一性的最小特征单元,包括叶轮和刷片。重组最小特征单元,构成柔性清土辊的最小特征结构,则由式(1)和式(2)可得到:
1.3.2 构建整体性能预测模型
由式(3)可知,柔性清土辊整体与最小特征结构在结构和作业区域两方面均存在线性关系。基于此,采用线性模型描述柔性清土辊的整体性能与局部性能的关系,表示如下:
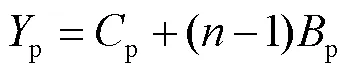
式中p表示柔性清土辊的整体作业性能;p表示最小特征结构的性能;p表示刷片的性能。
由式(4)可知,当最小特征结构和刷片的性能最优时,柔性清土辊整体性能最优。
1.3.3 预测模型验证
采用前期研制的卧式刷辊清土装置[3],依次改变柔性清土辊的刷片数量进行试验,试验装置如图4a所示。

注:a表示叶轮;bi表示第i个刷片;n表示刷片数量;A表示叶轮的清土区域;Bi表示第i个刷片的清土区域。
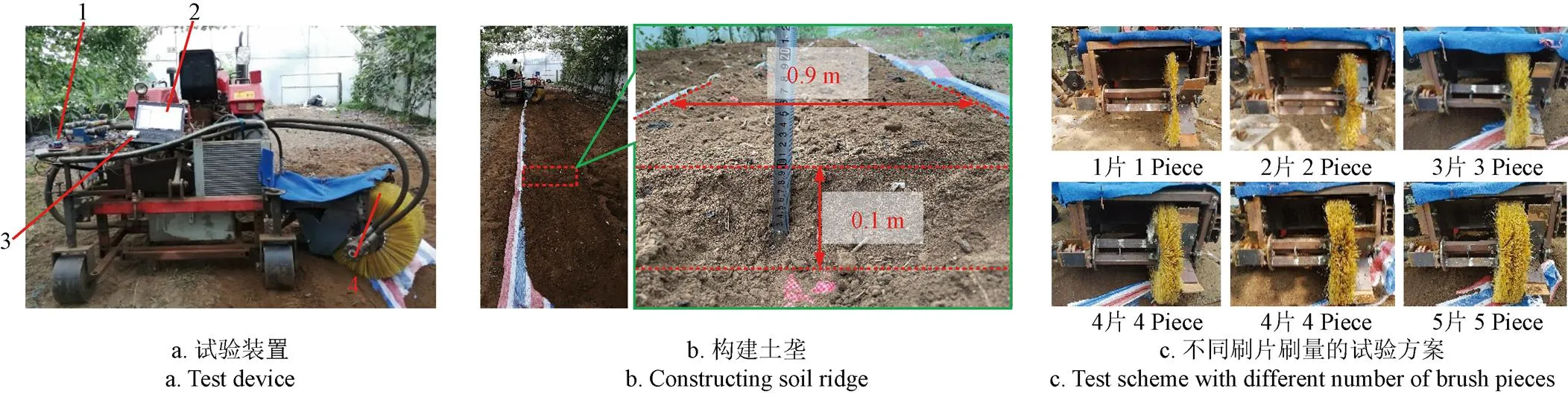
1. 压力传感器 2. 计算机 3. 数据采集卡 4. 柔情清土辊
试验过程包括:首先,依据农艺要求在地面铺设防寒布作为基准平面,在防寒布上方搭建长度为30 m的葡萄藤防寒土垄,土垄截面高度和宽度分别为0.1和0.9 m(图4b),土壤类型为沙壤土。其次,调整柔性清土辊安装角为30°,转速为550 r/min,前进速度为0.3 m/s。然后,设置柔性清土辊的刷片数量依次为1~6(图4c),其中,叶轮的轴向长度为100 mm,叶片数量为4,叶片偏角为0°,叶片锥角为0°。最后,调整柔性清土辊清土深度为0.1 m,在不同刷片数量下依次进行试验,每次试验重复3次。
基于前期研究[3],确定以清土率和阻力矩评价最小特征结构的作业性能,二者分别表示清土效果和功耗。清土率的计算方法如下:
式中1为清土率,%;1和2分别为试验前后理论清土区域内的土壤质量,kg。
清土率取5个结果的平均值,清土率越高,则清土效果越好。压力传感器将实时监测的液压马达进油口油压转化为电压信号,数据采集卡与LabView软件采集并读取该电压信号[22]。对获得的电压信号作均值化处理并重新转化为油压均值。根据摆线液压马达(BMR-50)的油压-扭矩特性参数,拟合一定流量下的油压-扭矩曲线和函数,将油压均值代入可得扭矩。阻力矩为柔性清土辊在清土试验过程与空行程的扭矩之差。
不同刷片数量条件下,柔性清土辊清土物理试验结果如图5所示。清土率和阻力矩与刷片数量的线性拟合决定系数2分别为0.987和0.993,呈较强的线性相关性,表明采用线性模型描述柔性清土辊整体与局部性能的关系是准确的。
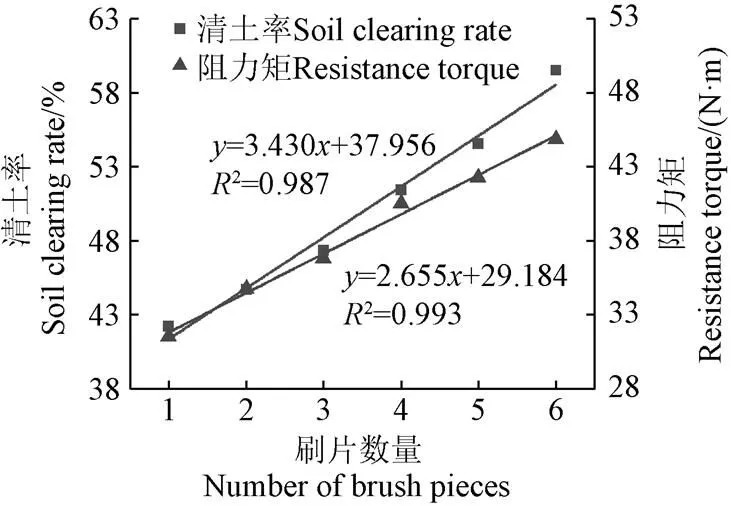
图5 不同刷片数量条件下柔性清土辊的清土物理试验结果
1.4 最小特征结构仿真模型标定
为了获取柔性清土辊的最优作业参数及工作性能,需要对最小特征结构和刷片进行优化求解,故本文基于EDEM-RecurDyn耦合建立柔性清土辊与土壤互作仿真模型。
1.4.1 材料变形行为标定
准确的材料变形行为是复杂柔性体建模成功的前提。刷丝和橡胶板不是单纯的尼龙和橡胶材料,已有的材料模型不能准确表达刷丝和橡胶的行为特征。设计基于RecurDyn软件和万能试验机的材料悬臂弯曲仿真与物理试验,如图6所示。以物理试验中材料受压变形的位移与载荷结果为响应值,对刷丝和橡胶板的材料模型参数进行标定。
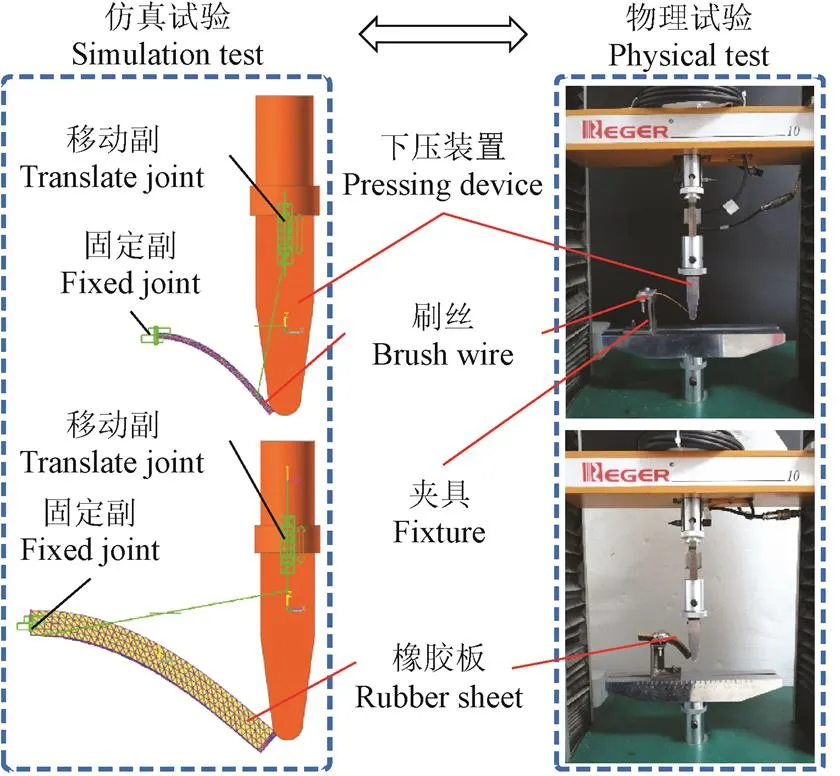
图6 材料悬臂弯曲仿真与物理试验
试验前,每种材料制备3种试样。橡胶板试样截面为19 mm×9 mm的长方形,长度依次为70、90、120 mm;刷丝试样截面为半径1 mm的圆形,长度依次为50、70、90 mm。测量橡胶板密度为1.164 g/cm3,刷丝密度为0.832 g/cm3。下压装置材料为45号钢,测量橡胶板与下压装置的静摩擦系数为0.643,动摩擦系数为0.617;测量刷丝与下压装置的静摩擦系数为0.284,动摩擦系数为0.178。
试验时,按照表1所示方案进行悬臂弯曲物理试验,设置不同试验条件是为了提高试验结果的准确性,同时便于对仿真模型进行标定和验证,得到材料(试样1)变形的载荷-位移曲线如图7所示。利用该曲线线性变化阶段的斜率计算得到橡胶板与刷丝的弹性模量均值分别为52.06和3 462.26 MPa。
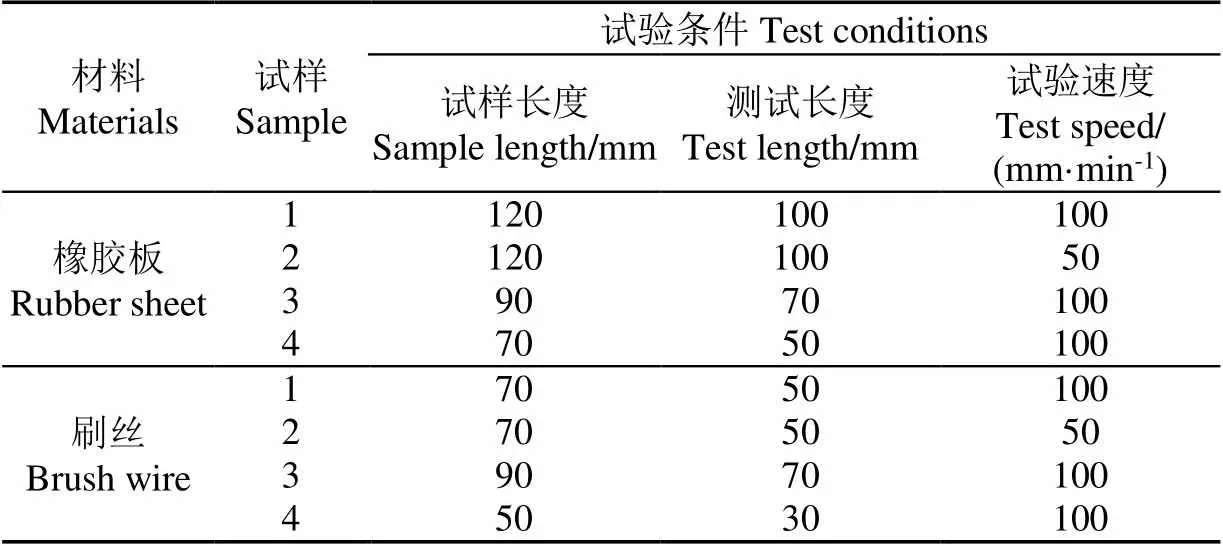
表1 悬臂弯曲试验方案
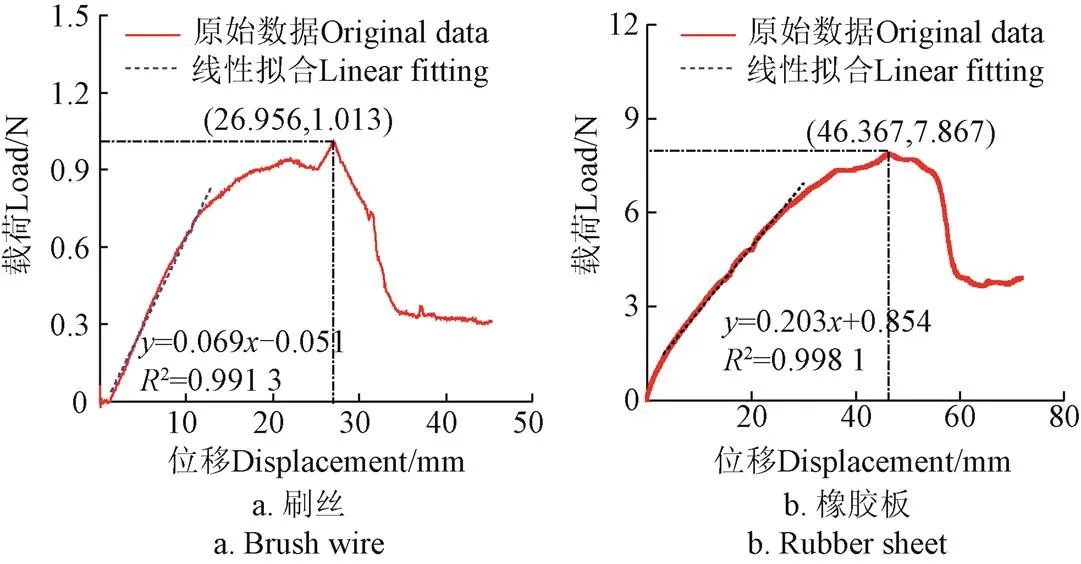
图7 材料的载荷-位移曲线
材料的阻尼比常数也是影响材料力学特性的重要参数之一,但阻尼比难以通过试验直接测量,而通过标定试验获得的阻尼比常数具有一定的容错性,能够补偿仿真模型中其他参数造成的误差。以试样1物理试验的载荷峰值为参考,将材料弹性模量代入RecurDyn软件中,建立相同试验条件的悬臂弯曲仿真模型。采用试错法,确定以单元类型solid 10和阻尼比0.005建立橡胶板有限元模型,以单元类型solid 4和阻尼比5×10-4建立刷丝有限元模型。
试样1条件下,橡胶板与刷丝的仿真试验和物理试验的载荷峰值相对误差分别为4.52%与5.33%(图8)。不同试样条件下,橡胶板与刷丝的仿真试验和物理试验的载荷峰值最大相对误差分别为7.24%与5.80%(图9)。结果表明标定的材料模型的单元类型和阻尼比是准确的,能够较好地反映材料的变形行为。
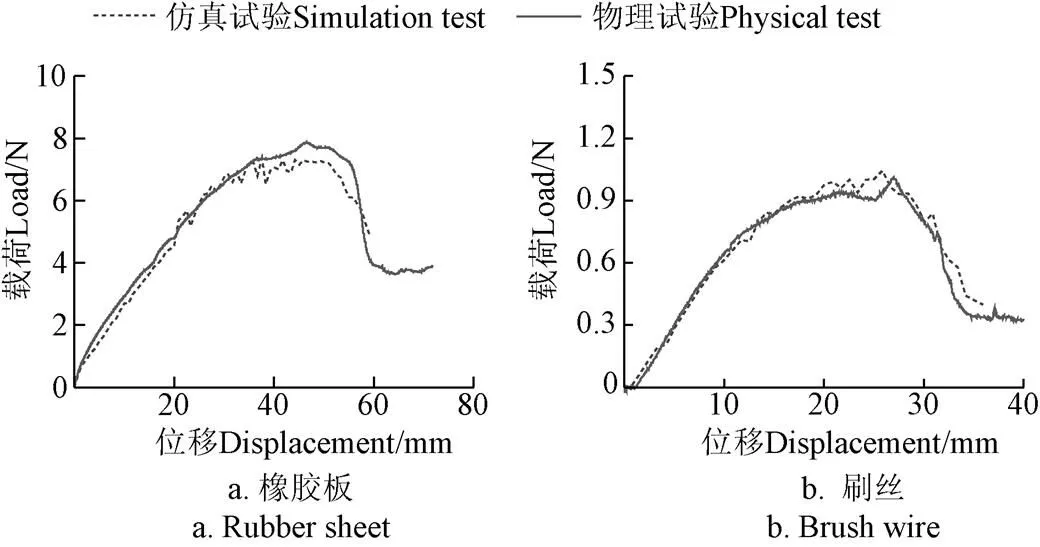
图8 仿真与物理试验的载荷-位移结果
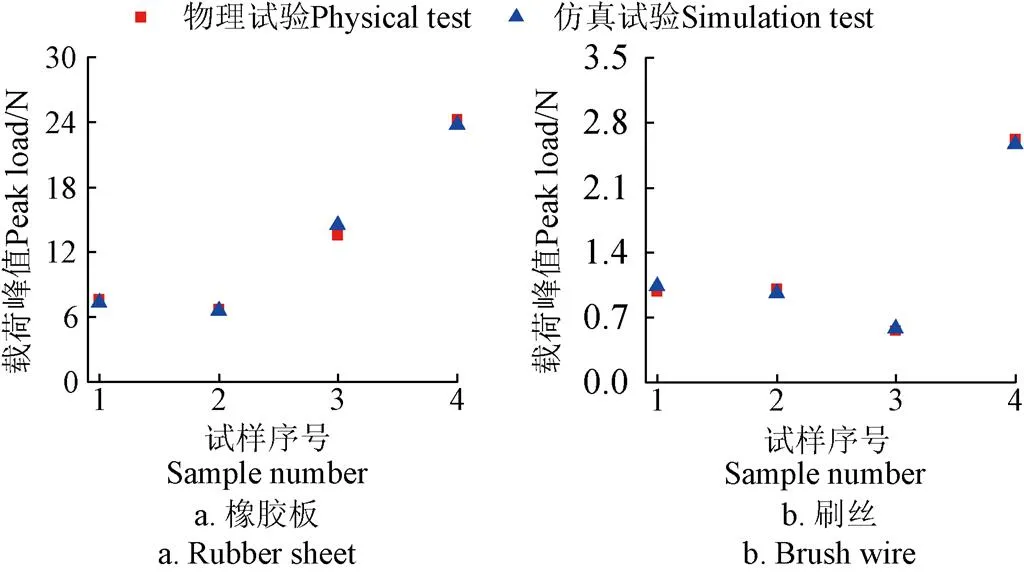
图9 仿真与物理试验的载荷峰值对比
1.4.2 最小特征结构-土壤互作模型标定
由图3所示的最小特征结构可知,橡胶板数量明确,准确的橡胶板材料变形行为以及橡胶板-土壤接触参数能够表达橡胶板与土壤的互作行为;而刷片中刷丝致密且数量不明确,除准确的刷丝材料变形行为以及刷丝-土壤接触参数外,刷片中的刷丝数量对刷片与土壤的互作关系具有直接的影响,进而影响最小特征结构与土壤互作模型的准确性。因此,以1.3.3节不同刷片数量的柔性清土辊的物理试验结果为参考,在相同试验条件下实施基于EDEM-RecurDyn耦合的柔性清土辊清土仿真试验,土壤建模参数参考团队前期研究成果[23]。采用试错法,对刷片中的刷丝数量进行标定,以获取准确的最小特征结构-土壤互作模型。
刷片的刷丝数量以阵列密度表征,以最小特征结构物理试验的清土率和阻力矩为参考,确定以刷丝阵列密度90建立刷片的有限元模型。此时,清土率和阻力矩的仿真与物理结果的相对误差分别为8.43%和1.52%,相对误差较小。不同刷片数量条件下,仿真试验结果如图10,清土率仿真与物理结果的最大相对误差为8.43%,阻力矩仿真与物理结果的最大相对误差为10.53%。当刷片数量为3时,阻力矩仿真与物理结果的误差达到最大,为3.88 N·m,这与刷片数量为5时阻力矩仿真与物理结果的误差(3.21 N·m)相近;但由于刷片数量为3时,阻力矩本身绝对值较小,因此,在较小误差下产生了较大的相对误差(10.53%);而在误差相近的情况下,刷片数量为5时的相对误差仅为4.23%,这是由阻力矩本身大小决定的;总体来讲,阻力矩仿真与物理结果的误差较小,二者基本一致,因此并不影响仿真结果的准确性。上述结果表明刷片的刷丝阵列密度标定结果准确,最小特征结构与土壤互作模型能够较好地反映二者的互作关系和最小特征结构与刷片的作业性能。
最终,建立的最小特征结构与土壤互作模型如图11所示。土壤条件一致时,局部建模方法中参与接触计算的平均单元数为300 000,平均节点数量为150 000;整体建模方法中参与接触计算的平均单元数为5 310 000,平均节点数量为1 750 000。上述结果表明本研究提出的局部建模方法的接触计算量仅为整体建模方法的8%左右,能够有效降低仿真时间和硬件配置要求。
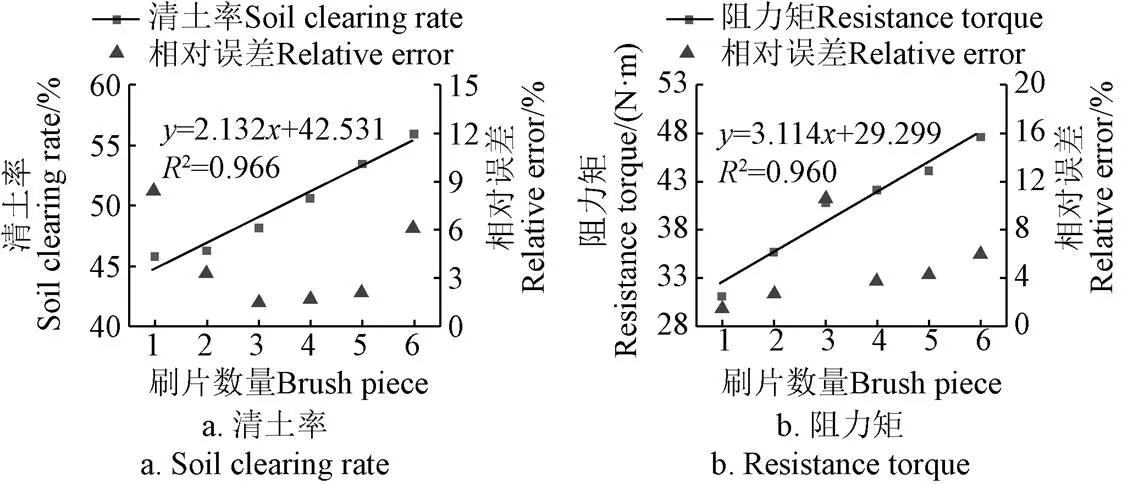
图10 不同刷片数量的柔性清土辊的仿真试验结果
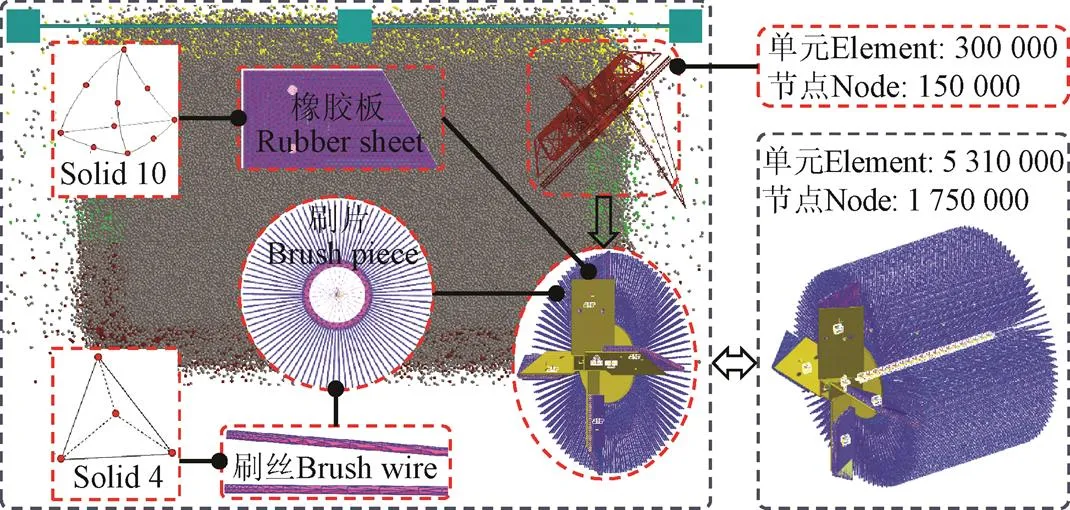
图11 最小特征结构与土壤互作模型示意图
2 柔性清土辊最优性能求解
2.1 试验方法
基于建立的最小特征结构与土壤互作模型,设计试验对最小特征结构的作业参数与性能进行优化求解。
2.1.1 Plackett-Burman试验
设计Plackett-Burman试验,从所有可能影响最小特征结构和刷片作业性能的参数中筛选影响较显著的参数。试验因素与水平如表2所示。试验结束后,测量最小特征结构的清土率1和阻力矩;然后,在最小特征结构基础上增加1个刷片再次依照试验方案进行试验并测量清土率和阻力矩,采用作差法计算相应试验条件下单个刷片的清土率4和阻力矩。安装角和轴向长度不同时,最小特征结构的清土宽度不同,此时不同组别间的阻力矩比较无意义。通过当量转换,计算单位清土宽度内的阻力矩,即最小特征结构的当量阻力矩3和刷片的当量阻力矩5,保证比较条件一致性,以便进行有意义的比较。
2.1.2 Box-Behnken试验
为了获取最小特征结构和单个刷片的最优作业性能,对筛选的影响较显著参数进行优化求解,设计四因素三水平Box-Behnken试验,试验方案与结果如表3所示,共进行29组试验,包括5组中心点重复试验。试验结束后测量最小特征结构的清土率1和阻力矩。根据2.1.1节,采用作差法计算相应试验条件下单个刷片的清土率4和阻力矩。

表2 Plackett-Burman试验因素与水平
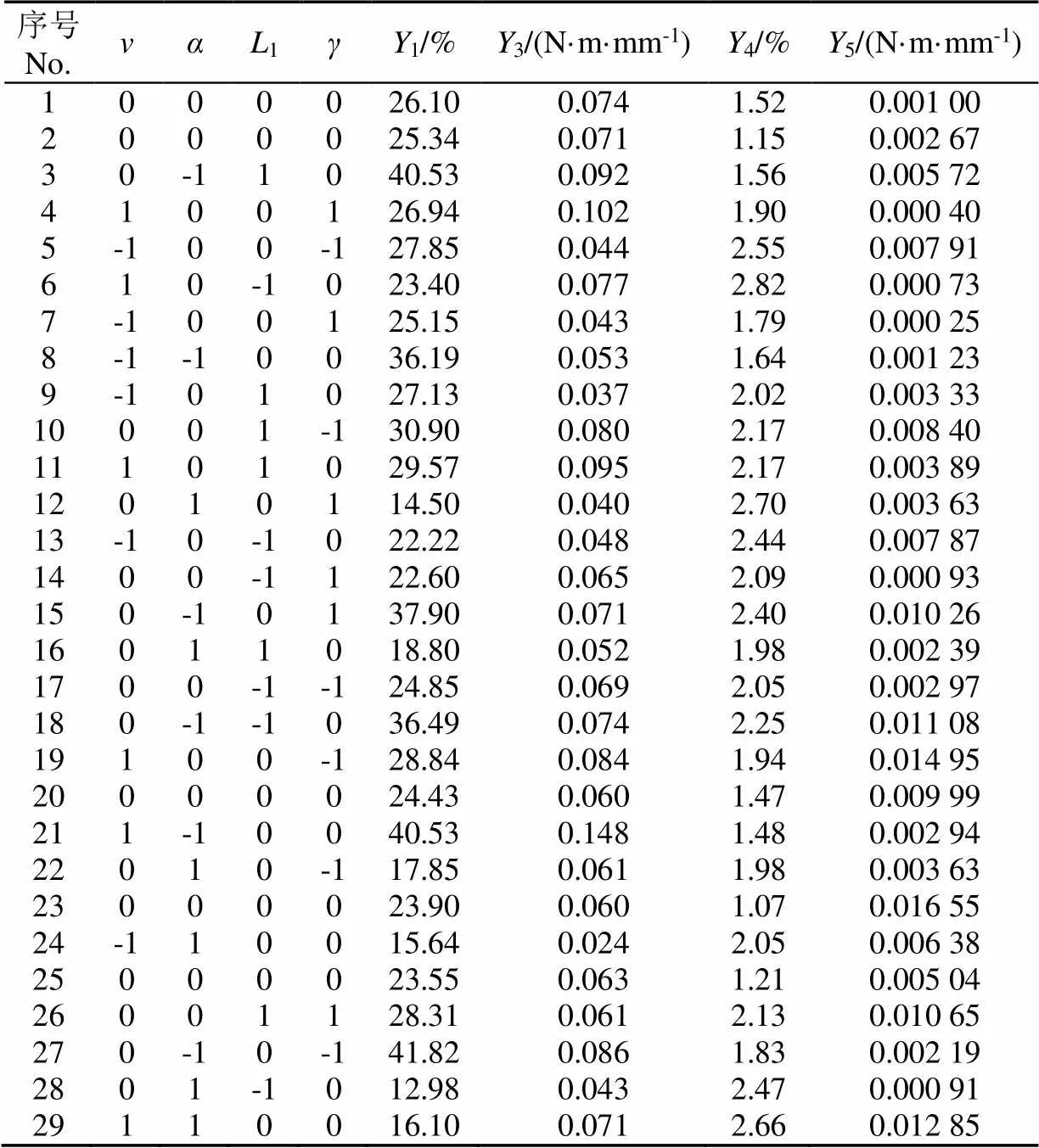
表3 Box-Behnken试验方案与结果
注:1表示最小特征结构的清土率,%;3表示最小特征结构的当量阻力矩,N·m·mm-1;4表示刷片的清土率,%;5表示刷片的当量阻力矩,N·m·mm-1。
Note:1indicates the soil clearing rate of the minimum feature structure, %;3indicates the equivalent resistance torque of the minimum feature structure, N·m·mm-1;4indicates the soil clearing rate of the brush piece, %;5indicates the equivalent resistance torque of the brush piece, N·m·mm-1.
2.2 试验结果与分析
2.2.1 关键参数筛选
Plackett-Burman试验方案与结果如表4所示,对试验结果进行方差分析,如表5所示。对最小特征结构而言,、、1以及对清土率1影响较为显著,和对当量阻力矩3影响较为显著。对刷片而言,对清土率4影响较显著,1对当量阻力矩5影响较显著。综合考虑各参数对清土率和当量阻力矩的影响,选取、、1和进行进一步优化分析。、和对清土率和当量阻力矩影响均较弱,三者对清土率的影响效应均强于当量阻力矩,同时对最小特征结构和刷片的清土率的影响效应均相反;当转速n取中间水平、叶片数量取中间或较大水平、叶片偏角取中间或较小水平时,有利于平衡最小特征结构和刷片的清土率,同时尽可能降低阻力矩。最终,确定转速为359 r/min,叶片数量为4,叶片偏角为0°。
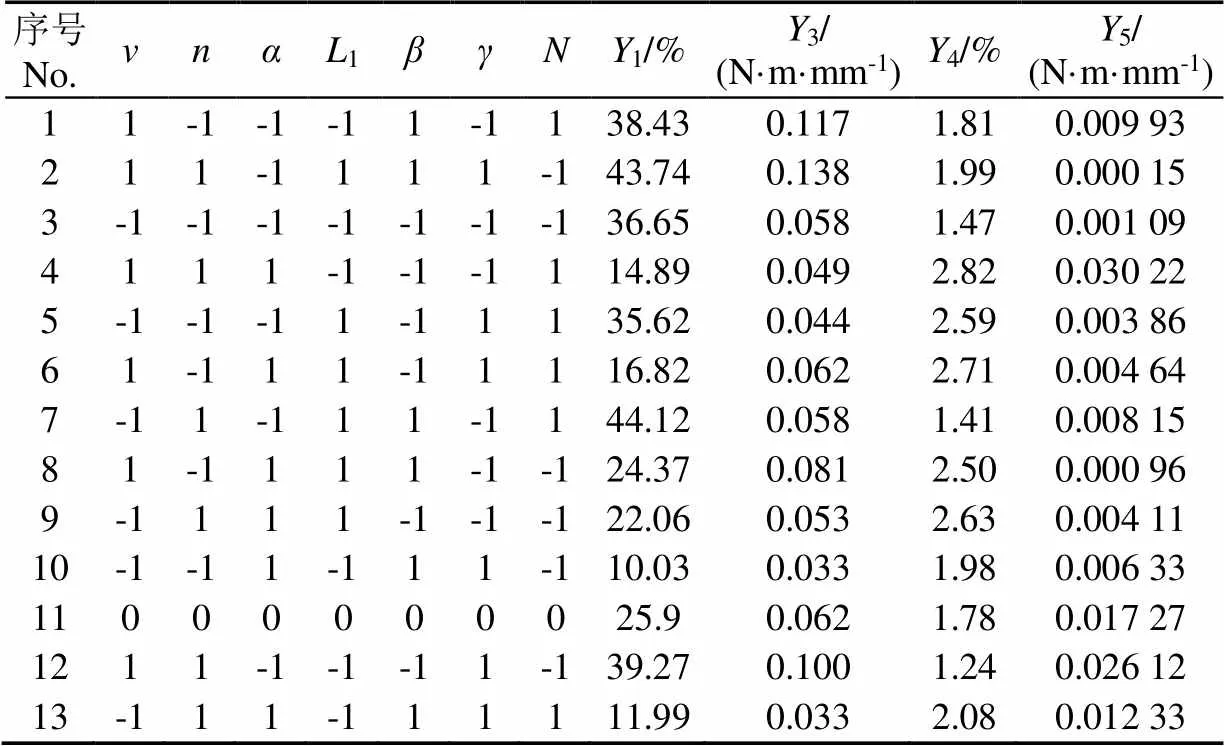
表4 Plackett-Burman试验方案与结果
2.2.2 构建清土率与当量阻力矩回归模型
依据Box-Behnken试验结果依次建立1、3和4的二次回归模型(式(6)~(8)),并对模型进行方差分析,结果如表6所示。
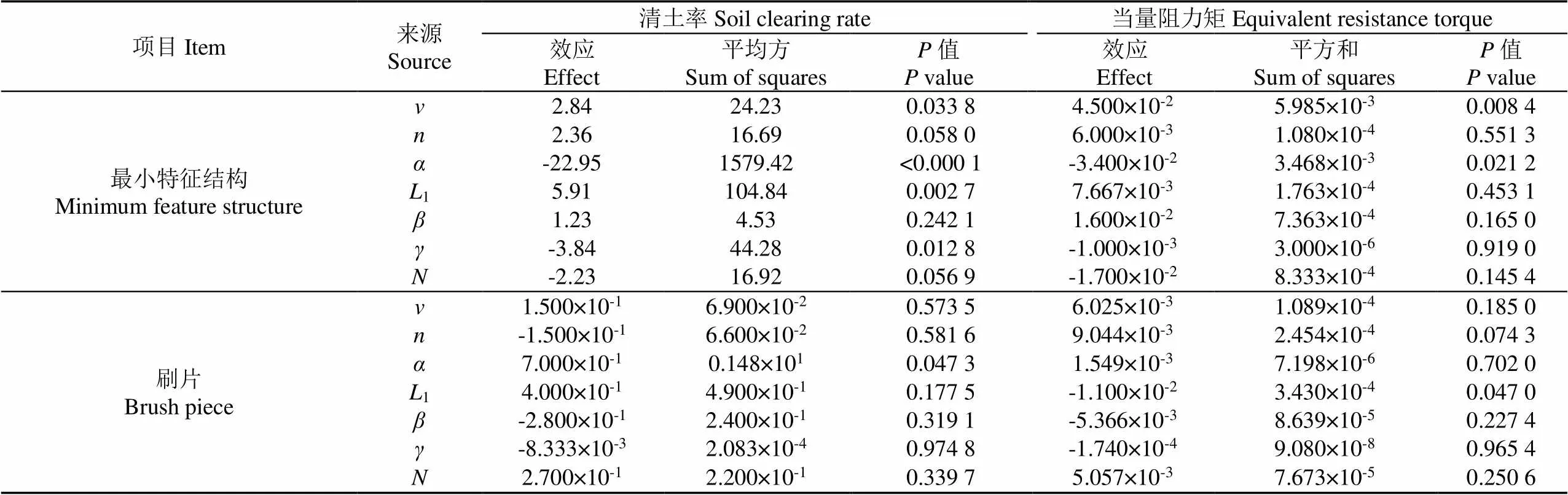
表5 Plackett-Burman试验结果方差分析
注:<0.05表示影响显著,<0.01表示影响极显著。下同
Note:<0.05 indicates significant impact, and<0.01 indicates highly significant impact. The same below.
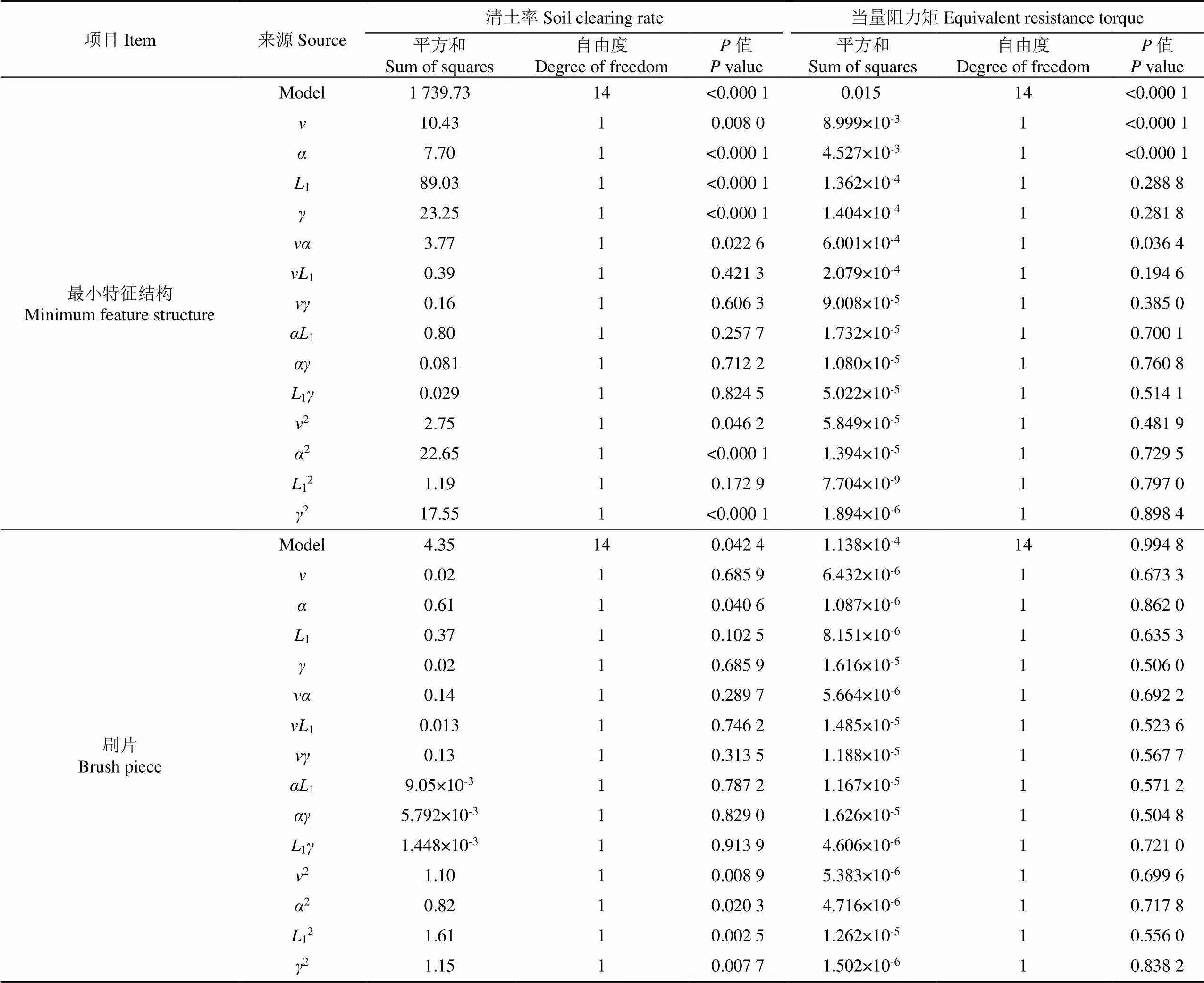
表6 Box-Behnken试验结果方差分析
清土率1模型是极显著的(<0.01),失拟项不显著(=0.929 6>0.05),表明模型拟合较好。、、1、、2和2对清土率影响极显著(<0.01),和2对清土率影响显著(<0.05),其余项不显著。通过剔除非显著项,优化二次回归模型,得到优化后的回归方程为

当量阻力矩3模型是极显著的,失拟项不显著,表明模型拟合较好。、对当量阻力矩影响极显著,对当量阻力矩影响显著,其余项不显著。通过剔除非显著项,优化二次回归模型,得到优化后的回归方程为
清土率4模型是显著的,失拟项不显著,表明模型拟合较好。2、12和2对清土率影响极显著,和2对清土率影响显著,其余项不显著。通过剔除非显著项(保留二次项显著的一次项),优化二次回归模型,得到优化后的回归方程为
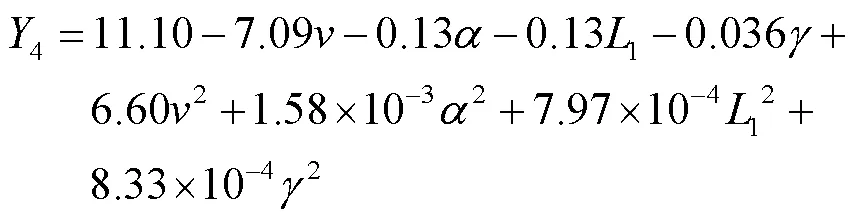
当量阻力矩5模型是不显著的,且4个因素均对当量阻力矩影响均不显著,这是由于作业参数变化引起的刷片阻力矩变化幅度较小,噪声对模型的影响较大,弱化了组别间的阻力矩差异,造成模型不显著。尝试缩减模型大小或更换平均模型、线性模型和双因素模型,拟合效果均较差,故刷片性能以优化清土率为主。
2.2.3 显著交互项对清土率和当量阻力矩的影响
分析显著交互项对当量清土率和当量阻力矩的影响效应,固定其他参数为中间水平,结果如图12所示。对于最小特征结构而言,随着前进速度增大和安装角减小,当量清土率增大。但两因素的交互作用较弱,二者对当量清土率的影响趋势几乎无变化。随前进速度增大和安装角减小,当量阻力矩增大。两因素对当量阻力矩的交互影响作用强于当量清土率。增大前进速度能够提高安装角对当量阻力矩的负影响效应。减小安装角能够提高前进速度对当量阻力矩的正影响效应。为了提高当量清土率并降低当量阻力矩,应该选择较小的安装角和较小的前进速度。
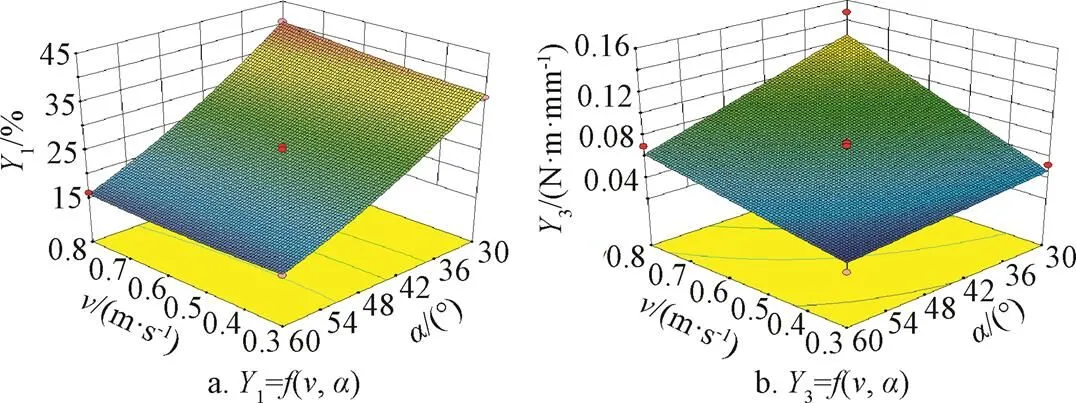
图12 显著交互项对清土率和当量阻力矩的影响
2.2.4 多目标优化求解
采用多目标优化方法求解最小特征结构和刷片的最优作业参数与性能,在Design-Expert 8.0.6软件中根据各参数的边界条件建立数学模型,如下:

将求解得到的多组优化结果代入仿真试验进行验证比较,得到最优参数组合为前进速度0.3 m/s、安装角30°、轴向长度50 mm和叶片锥角0°,该条件下1为36.87%,3为0.047 N·m/mm,4为2.80%,5为0.005 6 N·m/mm。通过反向当量转换,求解获得最小特征结构的清土率为36.87%,阻力矩为18.91 N·m,单个刷片的清土率为2.80%,阻力矩为2.78 N·m。以最优作业参数加工最小特征结构,并按照1.3.3节方法进行清土物理试验。最小特征结构和刷片的清土率与阻力矩分别为35.49%、20.83 N·m、2.51%、3.05 N·m,与仿真结果的相对误差分别为3.74%、10.15%、10.36%和9.71%,上述结果表明仿真优化结果准确可靠。
2.3 柔性清土辊整体性能估算与分析
依据1.3.2节建立的整体性能预测模型估算柔性清土辊的最优性能,当作业参数为前进速度0.3 m/s、安装角30°、轴向长度50 mm、叶片锥角0°、转速359 r/min、叶片偏角0°以及叶片数量4时,柔性清土辊的预测清土率和阻力矩分别为97.07%和78.68 N·m。以最优作业参数进行柔性清土辊清土物理试验,清土率和阻力矩分别为89.46%和82.26 N·m,与预测结果的相对误差分别为7.84%和4.55%。上述结果表明,基于仿真方法和模型预测的柔性清土辊整体性能与田间试验结果基本一致,本研究所提方法具有较好的可行性和准确性。
与整体建模方法优化的柔性清土辊相比,最优作业参数存在差异,这是由于局部建模方法忽略了土垄不同位置差异对刷片性能的影响以及其他刷片对最小特征结构的影响,但前进速度、安装角等关键参数的优化结果[3]相同。整体建模方法优化的清土率和阻力矩分别为86.72%和73.36 N·m,与局部建模方法优化结果的相对误差分别为10.66%和6.76%。进一步表明本研究所提方法具有较高的准确性和可行性。
本研究提出的局部预测整体的建模方法,保证准确性的关键在于预测模型构建和局部性能优化,因此,影响结果准确性的来源包括:预测模型构建的准确性和局部性能优化结果的准确性。预测模型的准确性影响误差累积,因此在构建模型时需充分考虑各因素对误差累积的影响,并在预测结果后对误差进行估计评价,以保证误差累积过程不会对结果准确性产生较大影响。局部性能优化结果的准确性影响预测模型估算的基础误差,本研究采用的仿真与实际相结合的优化方法是一种较为普遍的优化方法。在该方法中,仿真模型构建的准确性以及利用仿真试验数据建立回归模型的准确性均对局部性能优化结果有影响。因此在建立仿真模型时需以实际试验验证,以标定准确的仿真模型参数,只要保证仿真与实际试验的误差在合理范围内即可。回归模型构建时需考虑模型的显著性,模型显著性越高,则回归模型与试验数据的拟合性越高,回归模型更能反映相应条件下的试验情况与结果。同时,需保证回归模型优化的模型参数在其取值范围内,取值范围外的优化结果是不可靠的。综上,在使用局部预测整体建模方法过程中,考虑到预测模型构建以及局部性能优化过程中的误差即可取得较为准确的结果,降低结果偏差。
3 结 论
1)柔性清土辊的清土率和阻力矩与其刷片数量的线性拟合决定系数2分别为0.987和0.993,呈较强的线性相关性,表明采用线性模型描述整体与局部性能的关系是准确的。
2)基于EDEM-RecurDyn耦合建立的最小特征结构与土壤互作模型,增加不同数量刷片时,清土率和阻力矩仿真与物理结果的最大相对误差分别为8.43%和10.53%,表明模型准确可靠。同时,局部建模方法的接触计算量仅为整体建模方法的8%左右,能够有效降低仿真计算成本。
3)前进速度、安装角、轴向长度1和叶片锥角对最小特征结构和刷片的作业性能影响显著,优化结果分别为0.3 m/s、30°、50 mm和0°,该条件下最小特征结构的清土率和阻力矩为36.87%和18.91 N·m,刷片的清土率和阻力矩为2.80%和2.78 N·m。相同条件下,最小特征结构的清土率与阻力矩的物理试验结果与仿真结果的相对误差为3.74%、10.15%,刷片的清土率与阻力矩的物理试验结果与仿真结果的相对误差为10.36%和9.71%,表明仿真优化结果准确可靠。
4)预测模型估算的柔性清土辊的清土率和阻力矩分别为97.07%和78.68 N·m;物理试验结果与预测模型估算结果的相对误差为7.84%和4.55%;整体建模方法优化结果与预测结果的相对误差为10.66%和6.76%,表明本研究所提的局部建模方法具有较高的可行性和准确性。
[1] 牛丛,马帅,徐丽明,等. 葡萄清土与防寒布回收机械化技术研究现状与展望[J]. 中国农机化学报,2021,42(3):29-39.
NIU Cong, MA Shuai, XU Liming, et al. Research status and prospect of grape soil clearing and cold-proof cloth recycling mechanization technology[J]. Journal of Chinese Agricultural Mechanization, 2021, 42(3): 29-39. (in Chinese with English abstract)
[2] 马帅,徐丽明,袁全春,等. 自动避障式葡萄藤防寒土清土机研制[J]. 农业工程学报,2020,36(7):1-10.
MA Shuai, XU Liming, YUAN Quanchun, et al. Development of automatic obstacle-avoiding grapevine cold-proof soil cleaners[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(7): 1-10. (in Chinese with English abstract)
[3] 牛丛,徐丽明,马帅,等. 沟栽葡萄防寒布覆土卧式刷辊清除装置设计与试验[J]. 农业工程学报,2021,37(23):301-306.
NIU Cong, XU Liming, MA Shuai, et al. Design and experiment of the horizontal brush roll soil clearing device for covering soil above the cold-proof cloth of furrow planting grape[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(23): 301-306. (in Chinese with English abstract)
[4] 纪龙龙,谢焕雄,杨红光,等. 基于EDEM_Recurdyn耦合的马铃薯干式清土装置仿真分析[J]. 中国农机化学报,2021,42(1):109-115.
JI Longlong, XIE Huanxiong, YANG Hongguang, et al. Simulation analysis of potato dry soil cleaning device based on EDEM_Recurdyn coupling[J]. Journal of Chinese Agricultural Mechanization, 2021, 42(1): 109-115. (in Chinese with English abstract)
[5] HE Y, EVANS T J, YU A B, et al. A GPU-based DEM for modelling large scale powder compaction with wide size distributions [J]. Powder Technology, 2018, 333: 219-28.
[6] GAN J, EVANS T, YU A. Application of GPU-DEM simulation on large-scale granular handling and processing in ironmaking related industries [J]. Powder Technology, 2020, 361: 258-273.
[7] COETZEE C J. Particle upscaling: Calibration and validation of the discrete element method [J]. Powder Technology, 2019, 344: 487-503.
[8] CHEN X, ELLIOTT J A. On the scaling law of JKR contact model for coarse-grained cohesive particles[J]. Chemical Engineering Science, 2020, 227: 115906.
[9] FENG Y T, OWEN D R J. Discrete element modelling of large scale particle systems: I: exact scaling laws[J]. Computational Particle Mechanics, 2014, 1(2): 159-68.
[10] ÇAKTI E, SAYGILI Ö, LEMOS J V, et al. Discrete element modeling of a scaled masonry structure and its validation[J]. Engineering Structures, 2016, 126: 224-236.
[11] UCGUL M, SAUNDERS C, FIELKE J M. Discrete element modelling of tillage forces and soil movement of a one-third scale mouldboard plough[J]. Biosystems Engineering, 2017, 155: 44-54.
[12] HE Y, MULLER F, HASSANPOUR A, et al. A CPU-GPU cross-platform coupled CFD-DEM approach for complex particle-fluid flows [J]. Chemical Engineering Science, 2020, 223: 115712.
[13] ROY S, SINGH A, LUDING S, et al. Micro–macro transition and simplified contact models for wet granular materials[J]. Computational Particle Mechanics, 2015, 3(4): 449-462.
[14] MIO H, AKASHI M, SHIMOSAKA A, et al. Speed-up of computing time for numerical analysis of particle charging process by using discrete element method[J]. Chemical Engineering Science, 2009, 64(5): 1019-1026.
[15] HE Y, HASSANPOUR A, BEHJANI M A, et al. A novel stiffness scaling methodology for discrete element modelling of cohesive fine powders[J]. Applied Mathematical Modelling, 2021, 90: 817-844.
[16] 刘彩玲,王亚丽,宋建农,等. 基于三维激光扫描的水稻种子离散元建模及试验[J]. 农业工程学报,2016,32(15):294-300.
LIU Cailing, WANG Yali, SONG Jiannong, et al. Experiment and discrete element model of rice seed based on 3D laser scanning[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(15): 294-300. (in Chinese with English abstract)
[17] THAKUR S C, OOI J Y, AHMADIAN H. Scaling of discrete element model parameters for cohesionless and cohesive solid[J]. Powder Technology, 2016, 293: 130-137.
[18] WAND Y, MORA P, LIANG Y. Calibration of discrete element modeling: Scaling laws and dimensionless analysis[J]. Particuology, 2022, 62: 55-62.
[19] REHMAN A U, AWUAH-OFFEI K, SHERIZADEH T, et al. Use of scaled discrete element model of rubber tyre loader buckets for draft prediction[J]. Biosystems Engineering, 2022, 214: 1-10.
[20] 李郁,崔可源. 基于量纲分析方法的水平螺旋输送机离散元仿真研究[J]. 起重运输机械,2021(17):36-40,46.
[21] 翟之平,杨忠义,高博,等. 基于Mixture模型的叶片式抛送装置内气固两相流模拟[J]. 农业工程学报,2013,29(22):50-58.
ZHAI Zhiping, YANG Zhongyi, GAO Bo, et al. Simulation of solid-gas two-phase flow in an impeller blower based on Mixture model[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(22): 50-58. (in Chinese with English abstract)
[22] 袁全春,徐丽明,马帅,等. 有机肥深施机肥块破碎刀设计与试验[J]. 农业工程学报,2020,36(9):44-51.
YUAN Quanchun, XU Liming, MA Shuai, et al. Design and test of sawtooth fertilizer block crushing blade of organic fertilizer deep applicator[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(9): 44-51. (in Chinese with English abstract)
[23] 马帅,徐丽明,袁全春,等. 葡萄藤防寒土与清土部件相互作用的离散元仿真参数标定[J]. 农业工程学报,2020,36(1):40-49.
MA Shuai, XU Liming, YUAN Quanchun, et al. Calibration of discrete element simulation parameters of grapevine antifreezing soil and its interaction with soil-cleaning components[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(1): 40-49. (in Chinese with English abstract)
Optimization of the performance of the horizontal flexible soil-clearing roller using partial modeling
NIU Cong, XU Liming※, YAN Chenggong, TAN Haochao, SHEN Congcong, MA Shuai
(,,100083,)
Grapes can be cultivated in the cold areas of northern China. The cold-proof soil clearing has been the typical operation to prevent the freezing damage under the cold climate. Among them, the flexible roller is one of the most important components for the spring soil-clearing operation in northern grapes. The operating parameters have also posed a great impact on the performance of soil clearing. The numerical simulation can normally be used to optimize the operating parameters for the flexible soil-clearing roller. However, the overall modeling is confined to the harsh requirements so far, such as the large computational volume, long computation duration, and high configuration. In this study, a partial modeling of parameters was proposed to predict the whole one, in order to significantly reduce the cost of simulation calculation. Firstly, the minimum structure feature was extracted from the flexible soil-clearing roller. A prediction model of the overall performance was then constructed using the geometric similarity. Secondly, the minimum feature model of structure-soil interaction was established for the optimal operational performance using the coupled Discrete element method (DEM), and Multi-flexible-body dynamics (MFBD). Finally, the overall performance of the flexible soil clearing-roller was estimated using the prediction model. The results showed that a strong linear correlation was found in the linear fit2values of 0.987, and 0.993 between the soil clearing rate and resistance torque of the flexible soil clearing-roller with the brush piece number, respectively. It infers that the linear model was used to accurately describe the relationship between the overall and partial performance. A series of finite element models (FEM) were established for the rubber sheet with the solid 10 cells and the damping ratio 0.005, while the brush wire with the solid 4 cells and damping ratio of 5×10-4, and the brush blade with the array density 90 of brush wire. The relative errors were 8.43%, and 1.52% for the simulation and physical measurements, respectively, for the minimum feature structure of the soil clearing rate and resistance torque in this case, indicating the excellent consistence with relatively small ones. Once different numbers of brush pieces were added, the maximum relative errors were 8.43%, and 10.53%, respectively, indicating the accurate and reliable model. Meanwhile, the contact calculation volume of the partial modeling was only about 8% of the overall modeling, which was effectively reduce the simulation calculation cost. Furthermore, an optimal combination was achieved, with the forward speed of 0.3m/s, the mounting angle of 30°, the axial length of 50mm, and the blade taper angle of 0°. The significant effects were also found on the operational performance of the minimum feature structure and brush piece. Specifically, the soil clearing rates of the whole and single brush piece were 36.87%, and 2.80%, respectively, whereas, the resistance torques were 18.91 and 2.78 N·m, respectively, for the minimum feature structure under the optimal condition. The relative errors were 3.74% and 10.15% between physical and simulation of the minimum feature structure under the same conditions, where the relative errors of brush piece were 10.36%, and 9.71%, indicating the accurate and reliable simulation optimization. Anyway, the soil clearing rate and resistance torque were 97.07%, and 78.68 N·m, respectively, for the flexible soil-clearing roller that estimated by the prediction model. The relative errors between the physical and the predicted were 7.84%, and 4.55%. The relative errors between the optimized by the overall modeling and the predicted were 10.66%, and 6.76%, indicating the partial modeling with the high feasibility and accuracy. The findings can also provide a new idea for the interaction modeling between the complex flexible bodies and bulk particles.
discrete element method; modeling; grapevine; feature extraction; soil clearing; coupling simulation
10.11975/j.issn.1002-6819.202210179
S224.9
A
1002-6819(2023)-01-0050-10
牛丛,徐丽明,闫成功,等. 基于局部建模方法的卧式柔性清土辊性能优化[J]. 农业工程学报,2023,39(1):50-59.doi:10.11975/j.issn.1002-6819.202210179 http://www.tcsae.org
NIU Cong, XU Liming, YAN Chenggong, et al. Optimization of the performance of the horizontal flexible soil-clearing roller using partial modeling[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2023, 39(1): 50-59. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.202210179 http://www.tcsae.org
2022-10-24
2022-12-11
中央高校基本科研业务费专项资金资助和中国农业大学研究生自主创新研究基金项目资助(2022TC169);财政部和农业农村部:国家现代农业产业技术体系资助(CARS-29)
牛丛,博士生,研究方向为生物生产自动化技术与装备。Email:niucong0322@163.com
徐丽明,教授,博士生导师,研究方向为生物生产自动化技术与装备。Email:xlmoffice@126.com
