一种缩比模型自由飞试验失速判断方法
2023-03-29粟建波张甲奇邱宇豪王锦锦
粟建波,张甲奇,邱宇豪,王锦锦
(1. 桂林电子科技大学,广西 桂林 541704;2. 中国飞行试验研究院中航工业飞行仿真航空科技重点实验室,陕西 西安710089)
1 引言
缩比模型自由飞试验是遵循几何、质量特性、动力相似准则关系,使用全尺寸飞机缩比模型,在真实大气环境中开展的飞行试验,主要用于飞机失速速度、失速特性以及尾旋特性研究,其试验结果与全尺寸飞机具有很好的相关性,在国内外航空研究院所获得广泛的认可[1]。美国NASA曾利用缩比模型自由飞试验完成了F-15、F-16、F-117、F-18等多型飞机的大迎角特性研究[2-3],国内航空工业试飞中心也先后完成了运-10、ARJ、HO300、C919、AG600等飞机的缩比模型自由飞试验研究,试验结果降低了新机研制风险和成本,为全尺寸飞机的试飞和适航提供了重要的技术支持。
CCAR-23中,23.201(b)条款规定了机翼水平失速要求:飞机的机翼水平失速特性必须按下述要求在飞行中进行演示:在至少高于失速速度10 节开始,必须先拉升降舵操纵器件使减速率不超过每秒一节,直到失速发生,可用下列任一表明:①飞机出现不可控制的下俯运动;②防失速装置(如:推杆器)激发了飞机的下俯运动;③操纵器件达到止动点[4-5]。条款中规定“飞机出现不可控的下俯运动”即可判断飞机失速,在全尺寸飞机的失速试验中,驾驶员可以实时感知飞机的过载、姿态、声音、机体抖震等变化,分析飞机出现不可控的下俯运动,进而判断飞机失速。而在模型自由飞试验中,地面操纵手主要依靠目视和下传的飞行参数对飞机模型状态进行判断,存在较大的视觉误差和时间延迟,不能及时准确地判断出飞机模型出现了不可控的下俯运动。在多个飞机型号的模型自由飞试验中发现,依靠操纵手目视和下传的飞行参数进行飞机失速的判断,再进行改出操作,此过程存在3~5s的时间延迟,飞机可能进入过失速或深失速[5]。因此,国内外各研究院所和机构均在探索利用飞行控制系统自主实现模型失速判断的方法。
本文依据CCAR-23中,23.201(b)条款要求,创新性的设计了一种基于俯仰角速率判断飞机模型失速的方法,并通过飞行仿真和缩比模型飞行试验对此方法进行了验证,获得了可信的试验结果。
2 失速判断方法


(1)
当飞机失速特性不佳时,失速后模型可能会先出现剧烈滚转的现象,而不会先出现不可控的下俯运动。CCAR-23中,23.201(d)条款规定了机翼水平失速:在进入和改出机动时,必须有可能使用正常的操纵手段就能防止大于 15°的滚转和偏航[4]。自由飞模型的姿态角与真实飞机对应关系为1:1,因此可以沿用该标准作为模型失速的一项判断依据。
迎角是飞机失速试飞的一个重要参数,通过风洞试验可以得到飞机的失速迎角,而失速一般提前或略晚于达到该失速迎角时发生。飞机失速后,可能会出现异常的机头上仰。此时,通过俯仰角速率和滚转角均无法准确判断失速。因此,在模型自由飞试验中,为保证飞行安全,可以将迎角作为失速判定的一项基本条件,即在迎角达到某个预设值(一般大于失速迎角3°左右),认为飞机模型已经进入失速,可开始执行失速改出动作,迎角预设超限值可根据前期飞行试验结果进行调整。
某通航类飞机模型自由飞失速判断如图1所示。
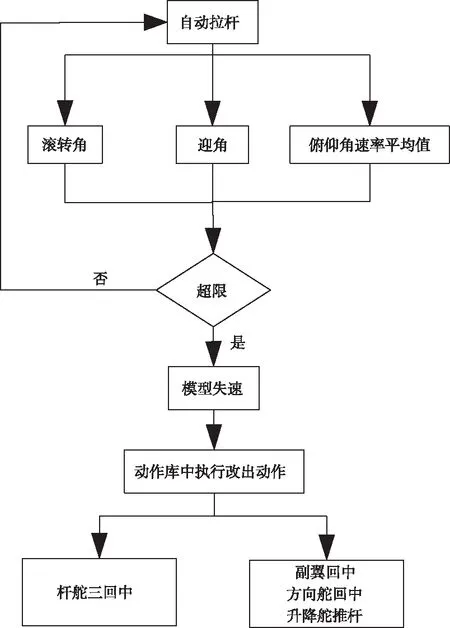
图1 模型失速判断流程图
3 控制律设计
3.1 纵向控制律
以往模型自由飞失速试飞方法是由地面操纵手缓慢拉杆,控制模型缓慢抬头进入失速。依靠操纵手控制进入失速过程中,受操纵人员能力限制和遥控器驾驶杆的操纵特点限制,无法充分地实现精准而缓慢的控制,因此实际拉杆过程一般比理论拉杆过程更加剧烈,导致减速率和过载偏大。为此,本文采用自主拉杆失速控制律[6],首先采集模型失速试验前配平时的升降舵值作为初始值de0,输入为升降舵随时间变化的舵面增量,反馈为俯仰角速率,输出为升降舵偏转指令,模拟地面操纵手缓慢拉杆的过程,实现自主拉杆进入失速。控制律构型如图2所示。
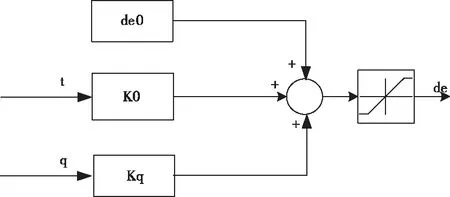
图2 自主拉杆控制律结构框图
3.2 横航向控制律
在机翼水平失速的过程中,通过副翼控制滚转角符合23部条款中不超过15°的要求。该控制律构型以滚转角指令 作为输入信号,引入滚转角 和滚转角速率 作为反馈信号,解算得到副翼输出指令,实现了滚转角的保持功能。于此同时,在方向舵回路引入了偏航角速率,用以增大飞机模型的荷兰滚阻尼比以及降低滚转时产生的侧滑角。控制律构型见图3。

图3 滚转角保持回路控制律结构框图
4 飞行仿真及试飞验证
4.1 相似参数
缩比模型自由飞试验为了能够真实反映全尺寸飞机本体的失速特性,必须满足相似准则关系。缩比模型与全尺寸飞机不仅要满足几何外形相似,同时还要满足弗劳德数 相似和质量分布相似准则,关键参数的相似关系见表1。

表1 缩比模型与全尺寸飞机参数相似关系
表中:K为缩比系数,Kρ为模型试验高度和飞机飞试验高度的密度比。
4.2 试验对象
根据某通航类飞机三维数模,按照全尺寸飞机缩比进行模型的制造,并与全尺寸飞机具有几何相似的桨叶、襟翼、升降舵、副翼和方向舵,模型螺旋桨按照动力相似关系进行模拟。缩比模型的基本参数为机身长L=2.5565m,质量M=50kg,翼展b=2.7705m,机翼面积S=0.9287m2,平均气动弦长MAC=0.3455m。
4.3 飞行仿真
依据某型飞机缩比模型气动数据,由力方程组、力矩方程组、运动方程组和导航方程组十二个状态方程,建立了高精度六自由度非线性仿真模型。
1)力方程组:
2)力矩方程组
3)运动方程组
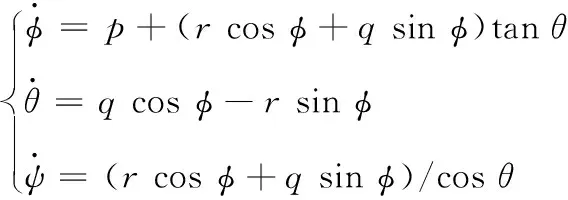
4)导航方程组
(5)
使用Matlab2015a建立仿真模型,电脑处理器为Intel(R)Core(TM)i5-6500CPU。基于建立的六自由度非线性仿真模型进行纵向和横航向控制律设计,并通过反复迭代确定控制律参数。同时,通过飞行仿真充分验证了俯仰角速率判断缩比模型失速方法的可行性。
4.4 试飞流程
某通航类飞机模型自由飞试验流程如下[7]
1)飞行前,预设自动开伞高度、滚转角超限值、迎角超限值、失速改出俯仰角速率值;
2)通过载机将缩比模型运载升空,到达指定的拉距空域后,缩比模型上电,地面操纵手操纵完成空中拉距试验,确认遥控遥测系统和各个舵面出舵正常;
3)载机到达指定的投放空域后,地面操纵手纵杆推杆指令俯仰角为-20°,同时侧杆中立指令滚转角为0°,在模型与载机安全分离后,纵杆回中指令俯仰角为0°。
4)待模型配平后,地面操纵手切换到失速模态,此时飞行控制系统纵向自主拉杆进入失速,横向自主修正滚转保持机翼水平;而一旦出现不可控的下俯运动、迎角限或滚转角超限三个条件之一,飞行控制系统判断模型失速,自动指令所有舵面在0.5s内回到气动零位,执行改出操纵;待模型改出失速后,操纵手依据任务单和模型当前状况,判断进入下一个动作或执行回收操纵;
5)完成所有试飞任务后,地面操纵手发出开伞指令,伞降回收模型。当高度低于设定值时,自动开伞回收模型。
4.5 试飞结果
某通航类飞机共进行了19个架次投放模型自由飞试验。试飞构型:巡航、着陆构型,重心位置:前重心、中重心和后重心,发动机功率:25%、75%,试飞内容:机翼水平失速试飞。
设置滚转角超限值15°,迎角超限值13°,0.3秒内60个采样点失速改出俯仰角速率均值-2deg/s,延迟改出时间1秒。图4为巡航构型后重心75%功率机翼水平失速试飞曲线。
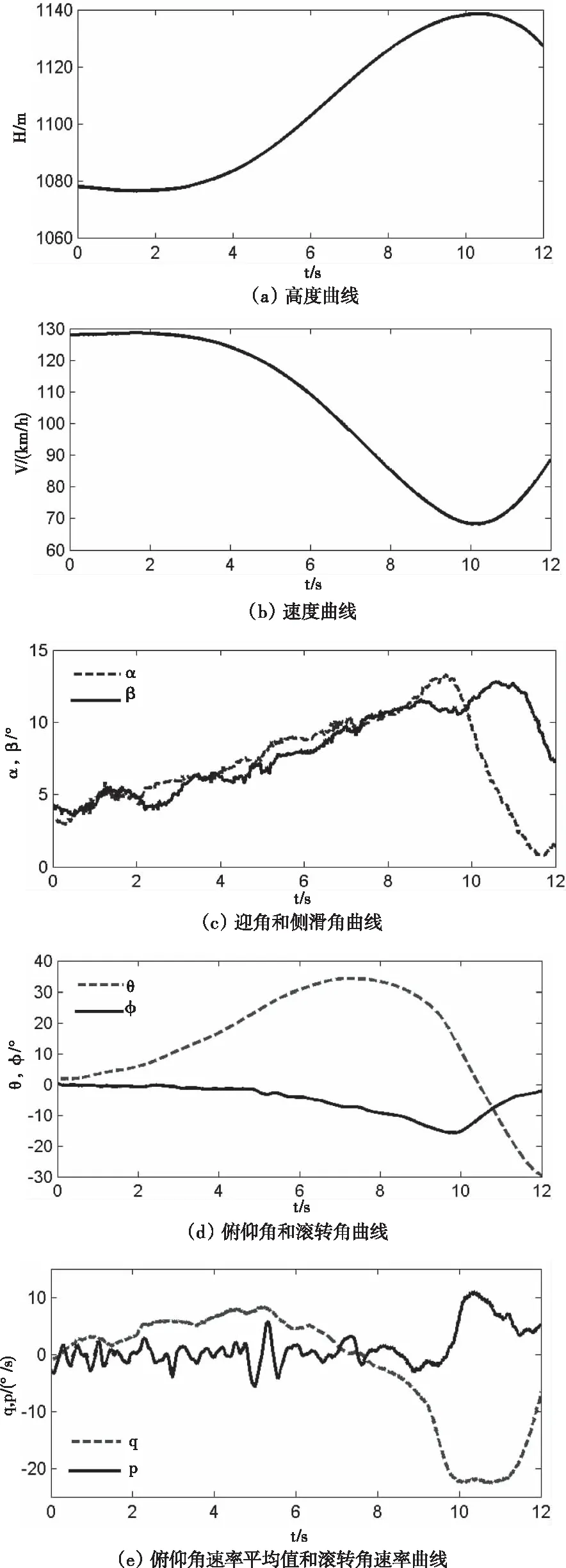

图4 巡航构型后重心机翼水平失速试飞曲线
由图4试飞曲线可以看出,某通航类飞机模型自由飞试验结果如下:
1)试验从第0s开始,飞行控制系统纵向自主拉杆,模拟飞行员拉杆进入失速过程,自主拉杆升降舵速率为-0.45deg/s,此时飞机模型开始减速,俯仰角速率缓慢增大,模型抬头并且迎角缓慢增加,同时出现左滚趋势,副翼自动出舵模拟飞行员右压杆修正滚转;
2)第5.3s时,俯仰角速率平均值到达最大值8.01deg/s,而后逐渐减小并在7.56秒时变为0;此时,迎角持续增大,副翼舵效降低,滚转角亦持续缓慢增大。
3)第8s时,迎角10.78°接近理论计算失速迎角,滚转角-9.31°,俯仰角速率平均值小于-2deg/s,俯仰角速率平均值超限,飞行控制系统判断模型失速,此时,继续拉杆1s,模拟飞行员1s失速改出反应时间,俯仰角速率和俯仰角持续减小,迎角持续增大;
4)第9s时,飞行控制系统自动推杆回中,模型迎角和俯仰角迅速降低,模型开始俯冲增速改出失速。
由飞行试验数据可知,在持续拉杆进入失速的过程中,迎角和滚转角均未超限,当俯仰角速率平均值超限时,实际飞行迎角与理论计算失速迎角非常接近,同时飞机出现低头趋势,因此,该方法能够准确的判断飞机模型出现不可控的下俯运动,进而判断模型失速,符合23部相关条款要求。
5 结束语
本文提出了一种基于俯仰角速率判断缩比模型失速的方法。通过飞行试验可以看出,该方法能够准确的判断飞机模型进入失速状态,提高了缩比模型自由飞试验的精准度。同时,通过飞行控制系统自动进入失速,自动判断失速,自动改出失速的方式,大大降低了地面操纵手的操纵难度,提高了数据的一致性、模型的安全性和试飞动作的准确性。