无人驾驶车前方不确定障碍物检测方法仿真
2023-03-29田国红关亮亮
田国红,关亮亮
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121001)
1 引言
随着科技的不断进步,人工智能已经在生产、科研等领域被广泛应用。无人驾驶车辆[1]作为汽车生产的新型技术,是当今前沿科技的重要发展方向。它不仅包括理论方法与关键科技技术的突破,同时涉及大量工程试验问题,社会关注度极高。由于无人驾驶车辆使用范围多为军事、航空航天等高端领域,工作环境复杂不确定,所以在研制无人驾驶车辆,提升车辆驾驶控制系统,对驾驶前方的障碍物实施有效的检测[2],是保障该类车辆安全运行的关键。
文献[3]方法提出一种融合密度聚类与区域生长算法的快速障碍物检测方法。该方法依据区域生长算法对点云栅格标记聚类;再通过参数自适应算法完成障碍物的目标细化;最后通过对障碍物的二次聚类实现对智能车行驶过程中的障碍物检测。文献[4]方法提出基于车载16线激光雷达的障碍物检测方法。该方法根据八叉树以及抽样一致性算法完成路面的地面点去除;再将路面投影点映射至二维网格上,提取障碍物的结构,建立两级网络模型;最后通过该模型完成无人车障碍物的检测。文献[5]方法提出基于激光测距雷达和机器视觉的障碍物检测。该方法依据激光雷达以及车载相机获取汽车行进图像;再通过对图像与激光雷达数据的融合结果,完成障碍物的准确识别。
上述方法由于未能在障碍物检测时,对激光雷达图像实施消噪处理,导致上述方法在检测障碍物时检测效果较差。为解决上述无人行驶车辆障碍物检测方法中存在的问题,提出不确定环境下无人驾驶车前方障碍物检测方法。
2 建立道路边界模型
在对无人驾驶汽车前方障碍物开展障碍物检测前,需要建立汽车行驶前方的道路边界模型,确定无人驾驶车行驶过程的道路边界点以及道路边界拟合。
2.1 获取道路激光雷达点云图像
无人驾驶汽车[6]在行进过程中,使用三维激光雷达对无人驾驶汽车前方道路展开扫描。选取三维激光雷达时,一般选用激光扫描线64条、输出133万三维点的激光雷达。扫描后,激光雷达获取的道路扫描数据如下式所示
(1)
式中,激光雷达扫描点为Ox,y,获取的激光雷达数据为Uv,i、j为常数。
设定激光雷达[7]的扫描角度为δb.j,获取过程如下式所示

(2)
式中,激光数据的三维坐标位置为[x,y,z],数据信息为ε,属性为s。最后设定道路激光雷达图像尺寸为[M×N],通过数据映射算法[8]获取无人驾驶汽车前方道路激光雷达图像,过程如下式所示
(3)
式中,获取的激光雷达图像为(Em,n,Vm,n),像素坐标原点为(Δm,Δn),映射系数为A。
2.2 道路点云数据预处理
获取无人驾驶汽车前方道路边界点之前,需要依据双边滤波算法剔除激光雷达图像中的离群点数据,以提升障碍物检测精度。
双边滤波属于非线性的空域滤波算法,该方法能够在保留图像边缘信息的同时极大程度地滤除点云图像中的噪声。设定无人驾驶汽车行驶道路激光雷达图像的高斯噪声图像模型为f(m,n),获取流程如下式所示
f(m,n)=d(m,n)+b(m,n)
(4)
式中,激光雷达图像的无噪声图像为d(m,n),激光雷达图像的零均值高斯噪声为b(m,n),噪声干扰的激光雷达图像为f(m,n)。噪声图像获取后,通过局部加权平均算法对噪声图像中的高斯噪声实施去噪处理[9],过程如下式所示
(5)
式中,图像的中心像素点(m,n)的邻域范围为Am,n,区域内像素点权值为q(i,j),像素灰度值为f(i,j)。
根据上述噪声消除结果,完成无人驾驶汽车的激光雷达图像中离群点的滤除。
2.3 搜索道路边界点
图像去噪后,使用自适应边界搜索算法对激光雷达图像展开搜索,确定无人驾驶汽车前方道路上的边界点,流程如下:
1)基于去除离群点的激光雷达数据建立无人驾驶汽车坐标系,并设定坐标原点,从左右两侧展开搜索。
2)以起始点为坐标原点,设定搜索范围,寻找并记录道路两侧的边界点位置。
3)若寻找到道路边界点,依据固定的距离向左右两端移动,继续寻找汽车前方道路边界点。
4)重复上述搜索过程,直至完成道路两侧所有待搜索区域的道路边界点的搜索。
2.4 边界点曲线拟合
道路边界点完成搜索后,对所有边界点展开曲线拟合。道路边界点拟合形状通常为直线或曲线,所有边界点拟合时,可通过道路边界模型,完成道路边界点信息的表达。
由于现今城市道路分布较为规则,所以道路边界点拟合时,使用最小二乘法[10]对道路边界点展开计算,通过获取的最小误差平方,获取边界点数据的最佳匹配函数,过程如下式所示

(6)

2.5 建立道路边界模型
基于上述确定的各项参数,建立无人驾驶汽车前方道路边界模型。在建立道路边界模型时,需要依据上述确定的道路边界点,建立模型的相关约束条件,结果如下式所示

(7)
式中,车道宽度为dis,车道宽度比为Ocentern,道路边界拟合曲线边长比为ratio,高度差为ΔZ,最大高度差以及最小高度差分别为Zmax、Zmin,道路边界点最大拟合曲线为[Mmax,Nmax],最小拟合值为[Mmin,Nmin]。
依据建立的相关约束条件,建立无人驾驶车前方道路边界模型,结果如下式所示

(8)
3 无人驾驶汽车前方障碍物检测方法
基于建立的道路边界模型,提取无人驾驶汽车行进过程中障碍物特征,构建障碍物模型,完成无人驾驶车前方障碍物的检测。
3.1 提取障碍物特征
通过上述建立的道路边界模型,提取无人驾驶车前方障碍物特征值[11]。由于采集的激光雷达数据是依据顺时针顺序排列的,道路边界模型中的激光雷达点包含道路的角度、距离以及反射的脉冲信号,因此,使用距离方法对激光雷达图像中的激光点展开聚类分割,从而提取障碍物的特征。具体特征提取流程如图1所示。
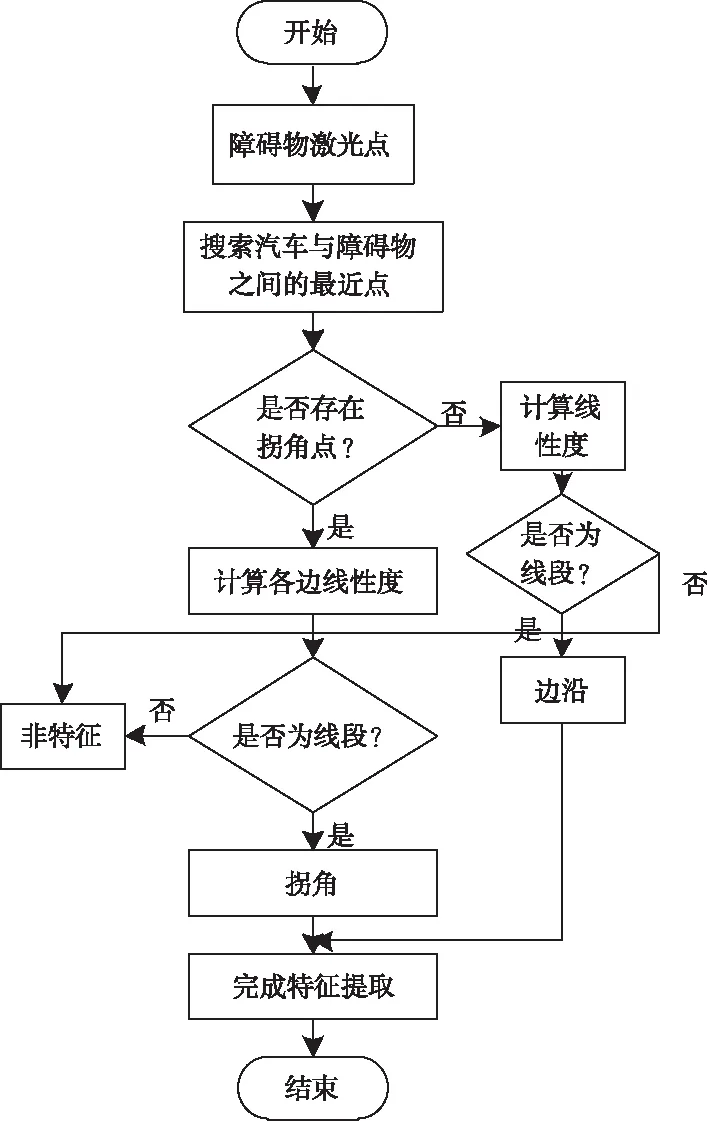
图1 障碍物特征提取流程
无人驾驶汽车前方障碍物包含在道路边界模型中,所以需要通过距离方法设定相关阈值,若计算出的激光点距离超出设定的阈值,可直接认定该组激光点中存在拐角点,通过计算拐角两边的线性度完成障碍物拐角边沿的特征提取。
3.2 建立障碍物模型
依据上述提取的障碍物特征,建立无人驾驶汽车的障碍物模型[12],过程如下式所示
Zm=(w,l,x,y)
(9)
式中,障碍物宽度为w,长度为l,障碍物位置为(x,y)。模型中,障碍物用框和点两种形式展开描述,依据建立的障碍物模型获取模型中框、点的运动状态,结果如下式所示
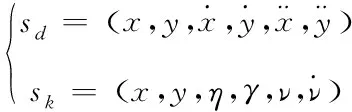
(10)

障碍物的边沿特征与拐角特征能够确定障碍物形状,由于城市内的道路环境影响,无人驾驶车的障碍物尺寸通常不会超出20米,所以建立障碍物模型时可直接将障碍物超出20米的障碍物剔除。
3.3 障碍物检测
为有效检测无人驾驶车[13]行进前方障碍物类型,在障碍物匹配过程中,通过获取的障碍物位置、长度、宽度等参数构建障碍物相似变量,计算障碍物之间的相似值建立全局相似矩阵,过程如下式所示:
zi,j=α(1/(mi-mj)2+(ni-nj)2)+
β(1/(li-lj)2+(wi-wj)2)+
χ(1/(liwi-ljwj))+δ(1/(xi-xj))
(11)
式中,建立的障碍物相似矩阵为zi,j。
障碍物完成匹配后,计算不同障碍物模型中障碍物运动状态值,使用支持向量机对障碍物运动状态值分类[14],通过分类结果确定障碍物类型,完成无人驾驶车前方障碍物的检测。
设定障碍物模型的时空特征系数为ρ,获取流程如下式所示:
ρ=({kt}Y,Zm,M)
(12)
式中,障碍物关键点数据为{kt}Y,障碍物图像数量为Y,障碍物的特征集合为Zm。最后基于支持向量机对障碍物特征系数实施分类,通过分类结果完成障碍物检测,结果如下式所示
c=fTρ-b
(13)
式中,障碍物特征系数分类结果为c,分类向量为fT,b为常量。
无人驾驶车前方障碍物检测[15]流程如图2所示。
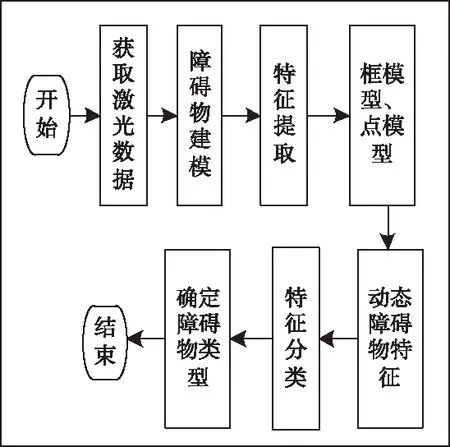
图2 无人驾驶车前方障碍物检测流程
4 实验
为了验证上述障碍物检测方法的整体有效性,需要对此方法测试。
4.1 实验结果及分析
分别采用不确定环境下无人驾驶车前方障碍物检测方法(所提方法)、一种融合密度聚类与区域生长算法的快速障碍物检测方法(文献[3]方法)、基于车载16线激光雷达的障碍物检测方法(文献[4]方法)展开测试。在开展无人驾驶汽车障碍物检测过程中,检测性能的高低是证明检测方法有效性的关键。采用检测效果作为测试障碍物检测性能的指标,以此测试所提方法、文献[3]方法以及文献[4]方法的检测性能。
在开展障碍物检测的过程中,检测效果能够直接反映检测方法的检测性能。选取正检率、误检率以及漏检率作为障碍物检测效果测试指标,以此测试3种障碍物检测方法的检测效果。正检率、误检率以及漏检率计算公式如下式所示
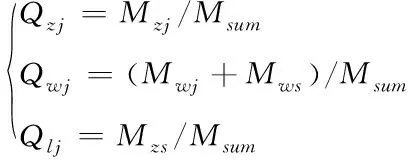
(14)
式中,参与检测的障碍物数量为Msum,障碍物的检测正确数量为Mzj,障碍物误检数量为Mwj,未正确分类障碍物数量为Mws,未检测出的障碍物数量为Mzs,正检率为Qzj,误检率为Qwj,漏检率为Qlj。依据上述计算结果,测试3种障碍物检测方法的正检率、误检率以及漏检率,结果如图3、图4所示。

图3 不同检测方法的正检率测试结果
分析图3可知,随着检测次数的增加,3种检测方法的正检率均出现不同程度的下降趋势。但是,所提方法测试出的障碍物检测正检率高于其 它两种方法。
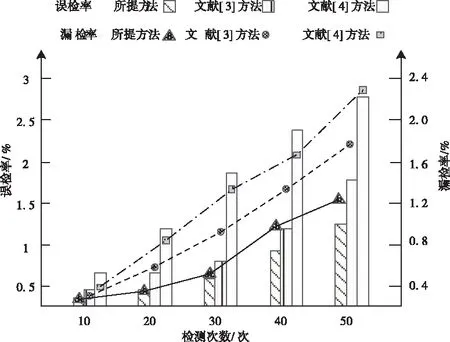
图4 不同检测方法误检率、漏检率测试结果
分析图4中的实验数据可知,随着检测次数的增加,3种检测方法的检测结果均出现不同程度的上升趋势。其中,所提方法测试出的误检率与漏检率是3种方法中最低的,这主要是因为所提方法在障碍物检测时,对激光雷达图像实施了消噪处理,所以该方法在障碍物检测时的检测效果好。
基于上述测试结果,选用固定的无人驾驶汽车,开展障碍物检测,测试3种方法的障碍物全局检测效果,结果如图5所示。
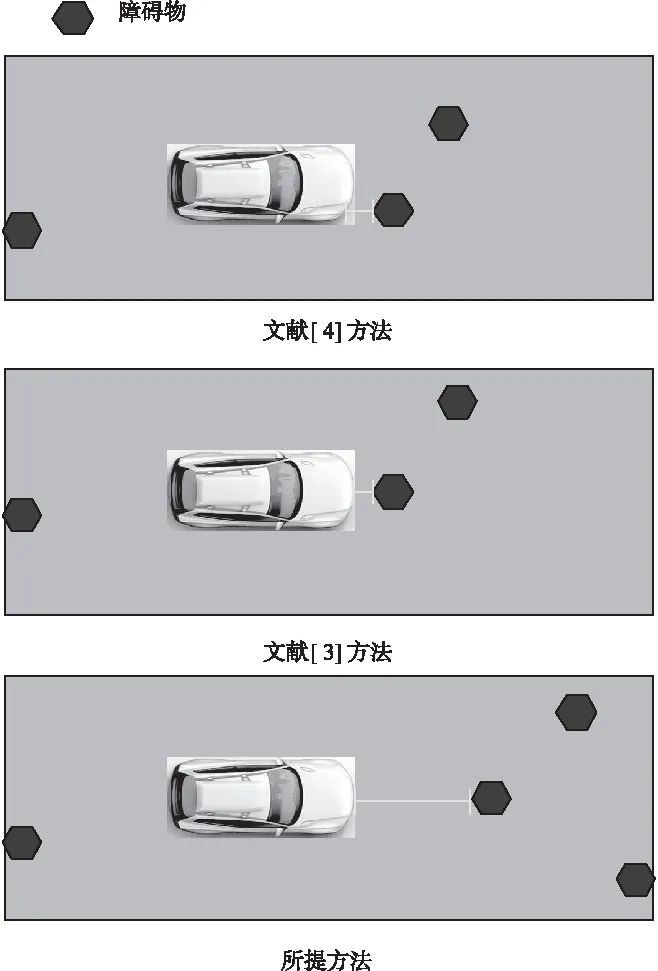
图5 不同方法的障碍物全局检测效果
分析图5可知,所提方法能够在远距离情况下,精准地检测出前方障碍物位置,而文献[3]方法和文献[4]方法检测出障碍物时,车辆与障碍物之间距离接近,从而无法及时避障。
综上所述,所提方法在开展无人驾驶汽车障碍物检测过程中,检测效果良好,证明该方法检测性能较好。
5 结束语
随着无人驾驶汽车的流行,无人驾驶汽车障碍物检测方法变得尤为重要。针对传统障碍物检测方法中存在的问题,提出不确定环境下无人驾驶车前方障碍物检测方法。该方法基于提取的障碍物特征建立障碍物模型,通过对障碍物模型时空特征系数的分类,完成障碍物类型的识别。该方法由于在搜索道路边界点时存在问题,今后会针对该项缺陷继续对该方法优化,直至方法完善。