基于物联网的多无人机协作能耗控制算法仿真
2023-03-29匡银虎张虹波
匡银虎,张虹波
(宁夏大学物理与电子电气工程学院,宁夏银川750021)
1 引言
近年来,我国的经济实力和国防实力不断增强,其中多无人机在国防和经济领域发展过程中起到关键作用,协助研究人员完成许多科研项目。在节能降耗的号召下,多无人机协作任务时能量耗损成为多无人机领域的一个难题[1-2]。
传统的多无人机协作能量消耗控制算法的核心是节能,因此在控制无人机能量损耗时,忽略了多无人机的工作协作效率,将节省的能耗都用来完成无人机协作效率,导致无人机协助能耗控制效果不明显,性价比低[3]。因此本文根据目前多无人机协作领域常见的无人机协助高能量消耗问题入手,为此本文提出基于物联网的多无人机协作能耗控制算法,保证多无人机协作效率的基础上,降低无人机的协作能耗,逐个分析,并结合物联网技术,构建一个基于物联网的多无人机协助能耗控制算法,解决以上问题。
2 基于物联网的多无人机协作能耗分析
本文对多无人机协作能耗进行分析,研究无人机协作能量消耗的主要方面,归纳出瞬时能耗、拥塞能耗以及路径能耗的消耗原理。
2.1 多无人机协作瞬时能耗分析
多无人机协作瞬时能耗指的是多无人机协作转接工作时的工作模式切换过程的瞬时能量消耗情况。切换过程如图1所示。
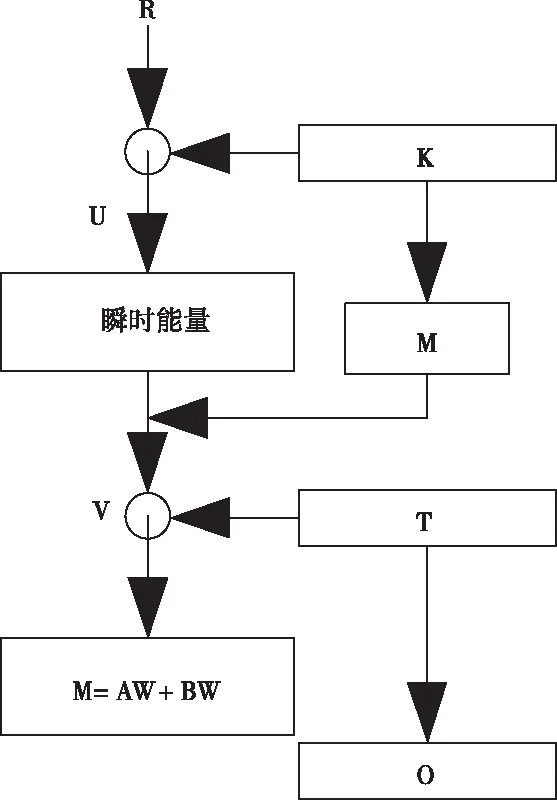
图1 切换过程
为了保证多无人机的工作效率,本文设定多种切换模式以供无人机选择,保证无人机的协作效率。本文设定2种切换模式下辅助无人机完成正常工作,在执行协作时,提前计算哪一种模式的能量消耗小,则执行某一模式,将无人机的能耗降到最低[4]。具体的2种瞬时切换模式的系统能耗计算如公式(1)所示:
(1)
其中,Pml表示无人机的瞬时输出功率pm2;φml表示无人机的瞬时工作功率;φm2表示耦合装置在无人机瞬时模式的能量利用效率。
2.2 多无人机协作拥塞能耗分析
多无人机协作任务时各个信息的获取和发送都是通过网络完成的,因为网络通道的容量是一定的,在无人机协作的多个任务同时并发时,会出现网络拥塞的情况,导致无人机协作任务进度停止,处于缓冲状态,同时会造成一定的能量消耗,本文分析的核心就是如何将多无人机的拥塞能耗降到最低[5]。
在无人机协作任务拥塞情况下,网络信道受外界条件噪音比和待机驱动影响,必须通过能量转换驱动无人机的待机状态,否则无人机协作任务就会中途停止。经过分析,在无人机协作任务因为网络拥塞停止时,通过提高无人机的吞吐量,来维持无人机待机状态消耗的能量比传统的消耗能量少,并且保证无人机的工作效率[6]。无人机工作路径如图2所示。

图2 无人机工作路径
本文设定一个多无人机协作拥塞检测函数,为无人机协作拥塞能耗分析提供数据分析基础,具体公式如下所示:

(2)
其中,lbefor表示无人机协作时前一时刻网络通信的进程排列长度;lcurent表示无人机协作时此刻的网络通信的进程排列长度;q表示通信队列空间;μ表示一个平滑系数。其中平滑系数超过0.5时,多无人机协作进程就存在拥塞的可能性,需要提前提高无人机的吞吐量,以维持无人机的正常工作,相反,则无人机无需提高吞吐量[7]。
2.3 多无人机协作路径能耗分析
多无人机协作路径也是无人机协作能量消耗的主要方面,影响无人机协作路径能耗情况的主要关键因素是节点的发射功率、端口的剩余能量以及路径的跳数,利用相关的计算公式,计算出一条能量消耗最低的路径,降低无人机总体的能耗量。无人机路径的确认前提是必须包括路径的保护节点、关键节点以及其它重要信息,将初次得到的路径进行能耗计算。多无人机协作路径如图3所示。
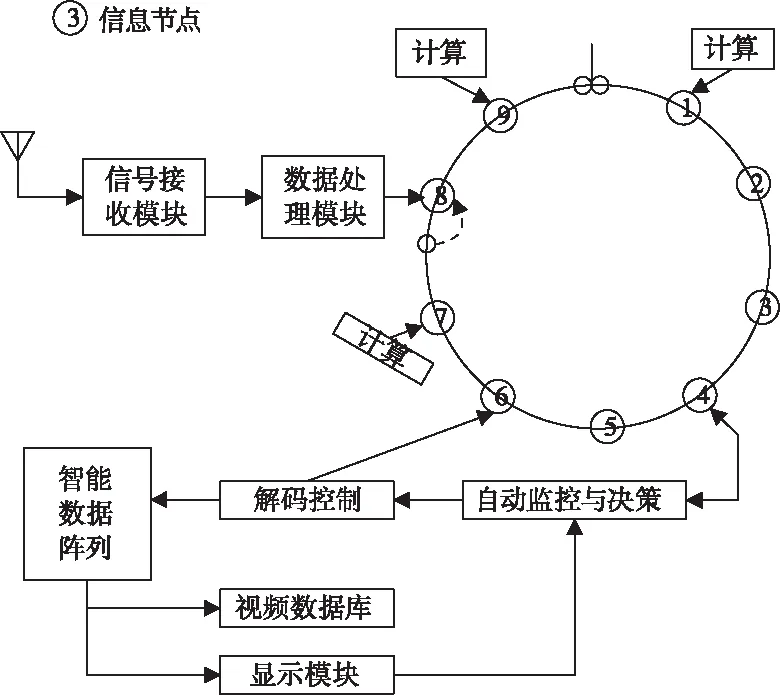
图3 多无人机协作路径
具体的无人机协作路径能耗计算公式如下所示

(3)
其中,α表示无人机路径节点的发射功率和发生端剩余能量的比值;β表示无人机路径节点的发射功率和接收端剩余能量的比值;γ表示路径跳数在总能耗函数中所占比重[8]。
检验无人机协作路径的能耗是否满足无人机协作工作效率,则要校验路径能耗是否符合相对应的约束条件,在本文设计的路径能耗计算公式中,建立以下路径的约束,如下所示
Cim=C(P)im+C(E)im+C(H)im
(4)
各个试探节点在完成每条路径的模拟路径后,向无人机发送路径回应,回应包括路径的信息和过程的能耗。通过以上公式计算出各个路径的能耗[9-10]。
3 基于物联网的多无人机协作能耗控制算法仿真
物联网技术的原理是通过各种信息传感设备,按照规定的网络协议,完成数据的接收、采集、定位、监测、控制、识别等操作。
物联网涉及的内容十分丰富,因此物联网技术在多无人机协作能耗控制算法中的作用是预测无人机在协作过程中可能消耗的能量,然后调用能耗控制算法,将无人机协作的能耗控制在规定范围内,达到本文研究的目的[11-12]。
通过以上对多无人机协助能耗的三方面分析和物联网技术原理分析,本文总结出基于物联网技术的多无人机协助能耗控制算法工作流程如图4所示。
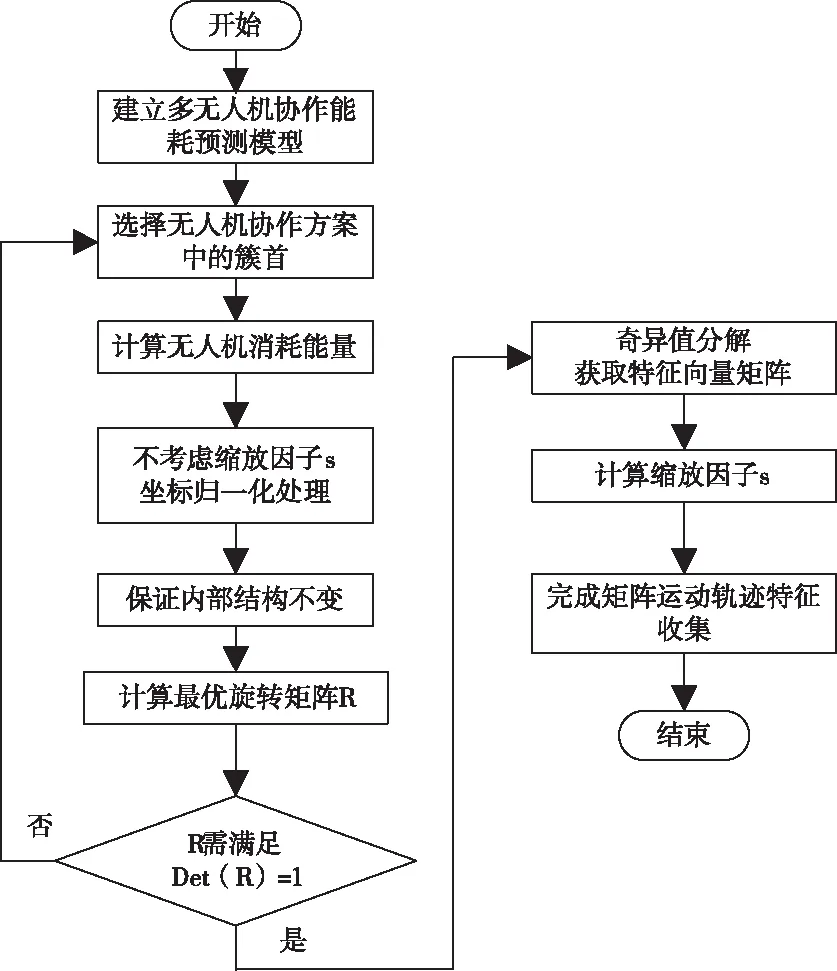
图4 多无人机协助能耗控制算法工作流程
根据图4可知,主要控制计算流程,分别为建立多无人机协作能耗预测模型、选择无人机协作方案中的簇首,最后计算每个簇首代表区域无人机消耗能量,得出总能耗,根据物联网街技术查询标准无人机能耗指标,通过算法对无人机能耗进行合理控制。
无人机能耗具体模型如下所示

(5)
式中,E1表示发射脉冲能量,单位为J;ET表示接收机探测器接收到的能量,单位为J;r表示发射端与接收端的距离,单位为m;βt和β分别表示发射端、接收端仰角,单位为弧度;θ表示发射半角,单位为弧度;μ表示散射角,单位为弧度;ks表示散射系数;S表示接收孔径面积,单位为cm2。
采集无人机协助任务时的簇首,簇首是可以代表多无人机协作工作中各个指标工作过程中能量消耗的唯一标识,每架无人机都设有紫外光通信发收装置,簇首的选举需要计算无人机协助任务中的各个端口的能量剩余和能量输出的比值,采用平均剩余能量的估计值代替实际多无人机中的剩余能量,计算簇首的平均消耗能量。无人机各个端口信号如图5所示。

图5 无人机端口信号状态过程
则第r轮中节点的平均能量为
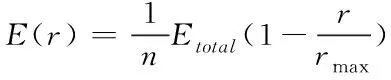
(6)
式中,r表示当前选举的轮数,单位为轮;n表示网络中僚机数量,单位为个;Etotal表示网络初始总能量,单位为J;rmax表示网络生存时间,单位为轮。
计算出预测多无人机协作能量消耗值后,通过物联网技术查询相对应无人机消耗的标准指标,如果计算的能耗值小于标准值,则根据能耗最优化公式计算是否存在最优的能耗控制方案;如果计算的能耗超出标准值,那么立即采用基于物联网的多无人机协作能耗控制算法,提出最有效的控制方案,减少无人机能量的损耗。为了将多无人机协作能耗降到最低,本文将控制无人机的发射功率,辅助计算公式如下所示

(7)
式中,Y为多无人机最小接收门限,G表示无人机簇首与目的簇的最小信道增益。
在控制了多无人机协作的发射功率最小能耗后,本文引入能量参量a,协调多无人机整体的能耗,最终的控制计算公式如下所示

(8)
Pmin=a-TDP
(9)
式中,Er(K)为无人机初始能量;Eo(K)表示无人机端口的剩余能量;D为比特数;T为时间。
4 实验结果分析
综合以上完成的基于物联网的多无人机协助能耗控制算法的研究,本文为了验证控制算法的控制效果,构建一个仿真,对实验结果进行数据分析,得出实验结论,实验参数配置要求如表1所示。
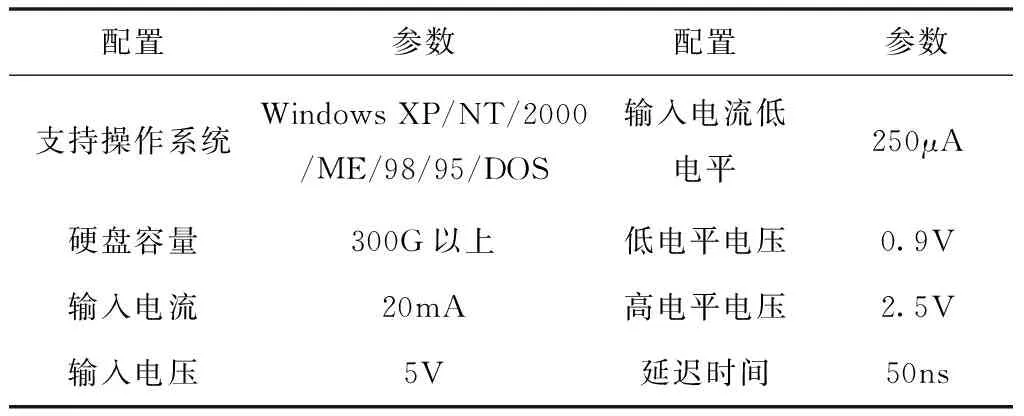
表1 实验参数配置要求表
为了保证实验的公平性和合理性,在实验进行前需要实验预处理操作,主要工作为选择同一型号的多无人机,并选择一个足够需求的实验区域。具体的实验流程如下所示:
1)首先将传统的多无人机协助能耗控制算法和本文研究的算法同时连入两个相同型号的无人机管理仿真系统内,进行调试,避免由于系统初始化导致实验终止的情况发生,数据记录人员分别就位,观察计算机数据变化的工作人员一旦发现实验存在危险,立即切断电源,结束实验;
2)在实验预处理操作完成后,将向两台多无人机发送相同的任务,确定接收任务成功后,开始实验,工作人员需要记录实验过程中多无人机能量消耗情况和对应时间,方便数据计算和分析;
3)一台无人机完成相应任务时工作人员宣布实验结束,工作人员将手动记录数据与计算机记录的数据进行校验,如果数据不存在较大的误差,则对两次实验记录的相关数据进行计算,得出实验结论,绘制实验数据结果图,完成本次实验操作。
具体的实验结果示意图如图6所示。
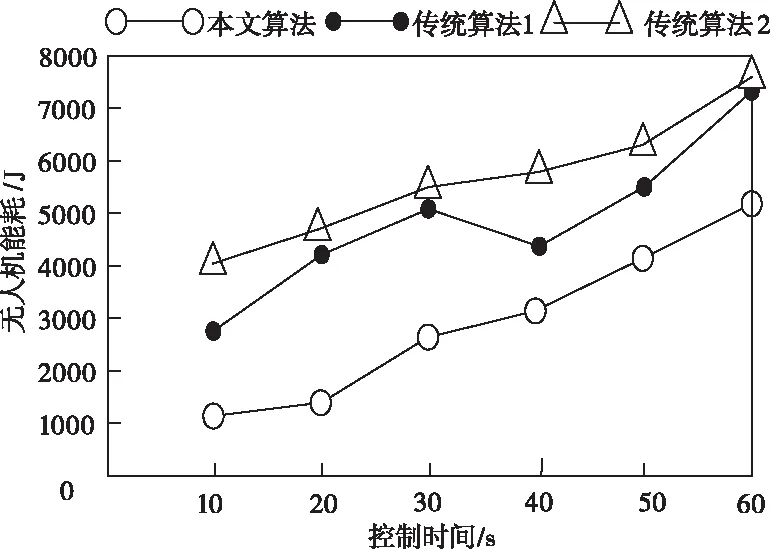
图6 多无人机协助能耗消耗仿真结果
根据图6可知,基于物联网的多无人机协作能耗控制算法比两种传统的多无人机协作能耗控制算法的能耗控制效果好,并且不影响多无人机协作的工作效率。本文研究的控制算法将无人机协助总能耗控制在100000J,是传统控制算法的多无人机协作消耗能量的一半,形成这一良好数据的原因一方面是因为本文采用物联网技术,算法提前对多无人机协作任务方案进行规划,计算出多无人机协作执行任务方案中能耗消耗最小值,并任务完成效果最好的方案。
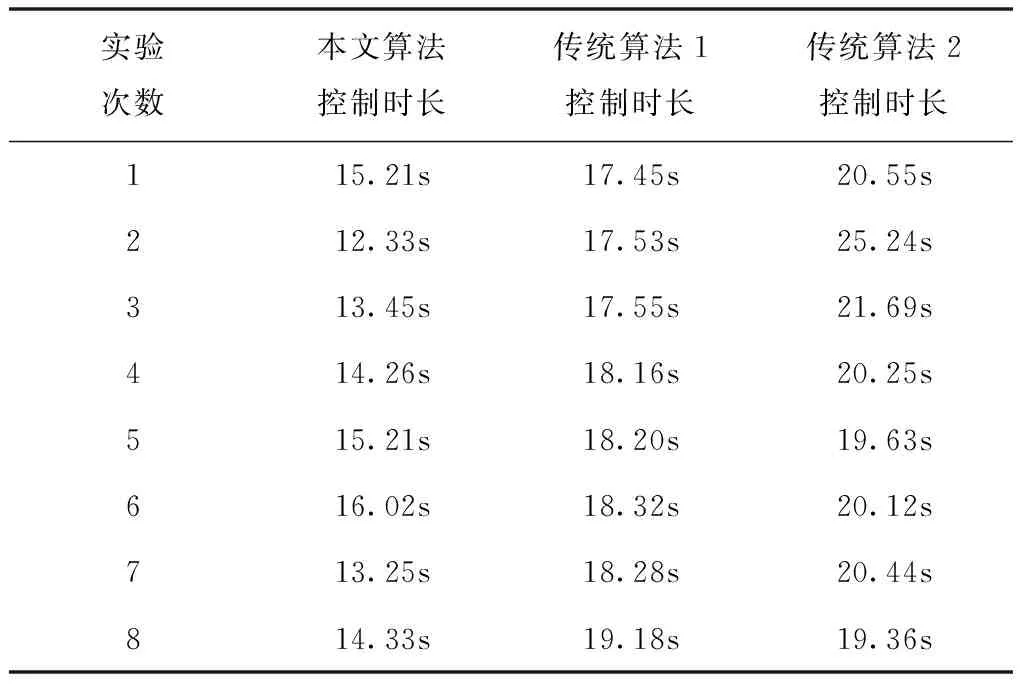
表2 控制时长仿真结果
本文深刻地分析多无人机协助过程中瞬时能耗原理、路径能耗原理以及拥塞能耗原理,在多无人机协作任务执行过程中,会根据各个特点进行合理控制,最后将无人机的能耗控制在标准范围内,从而有效缩短控制时长。本文研究的基于物联网的多无人机协助控制算法将无人机开始的驱动能耗降低至3500J,基于物联网的多无人机协作总能耗低于传统控制算法无人机消耗能量的关键。
5 结束语
本文分别在多无人机协作的瞬时能耗方面、拥塞能耗方面以及路径能耗方面进行全面的分析,得出多无人机协作能耗的关键点,然后论述物联网技术,根据物联网技术,对以上三个方面多无人机协助能耗进行合理的控制,完成控制算法的研究。最后根据实验分析,证明本文研究的基于物联网的多无人机协作能耗控制算法的控制效果优于传统的能耗控制算法。