Connectivity-maintaining Consensus of Multi-agent Systems With Communication Management Based on Predictive Control Strategy
2023-03-27JieWangShaoyuanLiandYuanyuanZou
Jie Wang, Shaoyuan Li,, and Yuanyuan Zou,
Abstract—This paper studies the connectivity-maintaining consensus of multi-agent systems.Considering the impact of the sensing ranges of agents for connectivity and communication energy consumption, a novel communication management strategy is proposed for multi-agent systems so that the connectivity of the system can be maintained and the communication energy can be saved.In this paper, communication management means a strategy about how the sensing ranges of agents are adjusted in the process of reaching consensus.The proposed communication management in this paper is not coupled with controller but only imposes a constraint for controller, so there is more freedom to develop an appropriate control strategy for achieving consensus.For the multi-agent systems with this novel communication management, a predictive control based strategy is developed for achieving consensus.Simulation results indicate the effectiveness and advantages of our scheme.
I.INTRODUCTION
THIS paper investigates the connectivity-maintaining consensus of multi-agent systems.A multi-agent system consists of multiple autonomous agents, and in a multi-agent system, one agent can communicate with other agents through a communication network so as to cooperate in achieving a task or a desirable collective behavior.As a collective behavior,consensus means that the states of the agents can change from different initial states to common final states [1].
Consensus of multi-agent systems is widely studied in the last decades [2]–[7], and it is still a hot issue, for instance,recently many scholars have considered the case that there is a leader in the multi-agent system, which leads to the studying of the leader-following consensus [2]–[4].The research results of consensus have many potential impacts on different fields[8]–[12] like flocking control, formation control, multi-robot systems and multi-vehicle systems.
In the studying of the consensus of multi-agent systems,most of the work is done without considering the impact of the sensing ranges of agents.In this paper, sensing ranges indicate the communication capacities of agents.One agent can only sense other agents within its sensing range.If considering the impact of the sensing ranges of agents in the process of reaching consensus, then there will lead to a research problem, the consensus with connectivity maintenance problem.This class of the consensus problem can also be called as connectivity-preserving consensus problem or connectivity-maintaining consensus problem.Differently from the general consensus problem, this problem not only requires that the system can finally achieve consensus, but also requires that the connectivity maintenance can be guaranteed in the whole process of reaching consensus.Here connectivity maintenance means that throughout the process of reaching consensus, the initial communication topology of multi-agent systems can be maintained.
For the research about the connectivity-maintaining consensus problem of multi-agent systems in literature, most of the work focuses on how to realize that the mutli-agent system can achieve consensus under the condition that the communication capacity is not enough, or it can be said that the sensing ranges of agents are limited and fixed [13]–[16].Similarly with these previous works that both consider the impact of the sensing ranges of agents, however, the work in this paper considers the condition that the communication capability is enough and the sensing ranges of agents are adjustable.The reason for this work lies in the consideration of energy saving.Reference [17] shows that there is a relationship between the sensing range and the communication energy consumption, a larger sensing range will consume more communication energy.Since the distance between agents has a downward trend throughout the process of achieving consensus, there is no need for agents to keep the initial large sensing ranges.With variable sensing ranges, agents in the system can consume less communication energy.
There have been two related works [18], [19] in this area.The sensing range adjustment strategy and the corresponding control strategy are designed for the systems with the firstorder dynamics and the second-order dynamics respectively.By the method in literature, the connectivity of agents can be maintained and the system can achieve consensus, and the simulation results indicate that communication energy is saved throughout the whole process.However, there are two shortcomings in above works.Firstly, the control performance of the designed control method in the literature is not good, which causes the communication range of agents to remain at large values for a long time, and thus there is much communication energy consumed.Secondly, the strategy about adjusting the sensing ranges of agents, or called communication management in [18], is developed based on a specific control strategy, and the communication management also needs to be redesigned if control strategy changes.
In order to meet the needs of generality, it is supposed to develop a novel communication management strategy which can be compatible with different control strategies.In order to consume less communication energy in the whole process, it is supposed to develop a novel control strategy that is compatible with the designed communication management strategy.
In this paper, a novel communication management strategy is developed and this novel communication management strategy is not associated with a specific control input, but with the states of agents, which gives more freedom to develop an appropriate control strategy to achieve consensus with this novel communication management.Meanwhile, considering the good performance of predictive control based strategy in[20]–[24], a predictive control based strategy is developed in this paper for the multi-agent systems with the novel communication management strategy.It is noted that the scheme in this paper considers the impact of the sensing ranges, and achieves the connectivity-maintaining consensus, which is different from the aforementioned predictive control based strategy for consensus in literature that not considering the impact of the sensing ranges.By the scheme in this paper, the connectivity-maintaining consensus is achieved, and the communication energy is saved in the whole process.It is also noted that compared with the scheme in [19], by the scheme in this paper, the system consumes less communication energy while achieving the connectivity-maintaining consensus.
Some of the results of this work have appeared in the conference version [25].Differently from the early conference version, in this paper, we complete and supplement the main results part to perfect the theoretical details of our scheme,meanwhile, we supplement the simulation part and add a new simulation that compared to related work in [19] to indicate the advantages of our scheme and then further to verify the effectiveness of our scheme.Meanwhile, we have also modified other parts to make our work more detailed, more specific and clearer.In summary, this paper is the modified and completed version of our work.
The remainder is then structured as follows: Section II is the part for the preliminaries and problem formulation, in this section, some necessary preliminaries and the control objective will be stated.Section III presents our main results, including the design of the communication management strategy and the design of predictive control based strategy.Section IV is the simulation part, an example is presented to verify the effectiveness and advantages of our scheme.And Section V is the conclusion part.
II.PRELIMINARIES AND PROBLEM FORMULATION
In this section, some mathematical notations used in this
The dicrete-time second-order dynamics (1) is obtained by discretizing the following continuous-time double-integrator dynamics with zero-order hold (ZOH) [23]:
III.MAIN RESULTS
In this section, our scheme that achieves the control objective (3) will be presented.The key idea in our scheme is that the time-varying sensing rangesi(k) is designed to guarantee the connectivity, that is, to guarantee that Ni⊆Si(k) holds at any time instantk, and the control inputui(k) is designed to make the system reach consensus.Our main results will be presented in the following two subsections.
A.Communication Management Strategy
The“Communication management”in this paper means a strategy about how to adjust the sensing ranges of agents in a multi-agent system, and this name is quoted from [18].The design idea of the communication management strategy is that the update of the sensing range value is supposed to be earlier than the time of information acquisition, and the previously determined sensing range value is always larger than the distance between the agent and its neighbor, which means that the connectivity maintenance can be guaranteed.The impact of the communication management will be introduced with Fig.1.
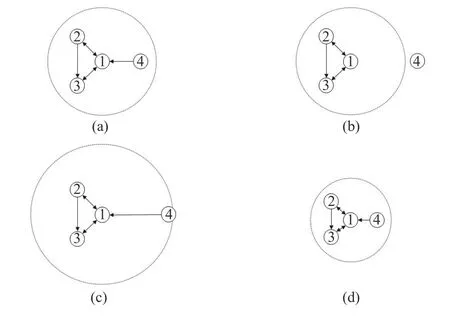
Fig.1.The impact of the communication management.
In Fig.1(a), there is a directed topology of a four-agent system, the relation between two agents is represented by the arrow, and the direction of the arrow indicates the direction of the information transmission.For example, the arrow from the agent 4 to the agent 1 represents that the agent 1 can sense the agent 4, and it can also be said that the agent 1 can obtain the information from the agent 4.The sensing range of the agent 1 is represented by the big circle.With the communication topology in Fig.1(a), the agent 1 can obtain the information from all other agents.
However, if there is no consideration about the sensing range, a situation in Fig.1(b) could happen.In Fig.1(b), the distance between the agent 4 and the agent 1 is larger than the sensing range of the agent 1, which means that agent 1 can not obtain the information from the agent 4, and the initial communication topology is broken.With the communication topology in Fig.1(b), the multi-agent system can not achieve consensus.
The communication management is a strategy that can guarantee the connectivity of the system topology.In Fig.1(c),with the communication management strategy, the sensing range of the agent 1 can be changed to a larger value before the situation in Fig.1(b) happens, such that the connectivity of system topology can be guaranteed.
Consider the fact that the distance between agents has a downward trend throughout the process of reaching consensus.Then the sensing range of the agent 1 can be changed to a smaller value with the communication management strategy just like that shown in Fig.1(d), since a smaller sensing range can also meet the need of communication and further a smaller sensing range can save more communication energy.
Assumption 1:The sensing range of every agent in a multiagent system can be adjusted to a given value, and the maximum adjustable sensing range of every agent in a multi-agent system is large enough such that the adjusted value never exceeds the maximum adjustable value.
Remark 1:Reference [17] shows that there is a relationship between the sensing range and the power of the power amplifier in a sensing device, and the adjustment of the sensing range can be realized by the adjustment of the power of the power amplifier.
Remark 2:In Assumption 1, the maximum adjustable sensing range is determined by the actual physical constraint.It can be observed in Assumption 1 that the maximum adjustable sensing range is supposed to be large enough, such that the adjusted value never exceeds the maximum adjustable value.It is noted that there is no explicit and rigorous criterion for“large enough”, and the judgment for“large enough”is supposed to be combined with the actual physical constraints and the specified task, and here we provide a case as an intuitive explanation.Consider a rendezvous task for a multi-robot system, since the distance between a robot and its neighbor robot is gradually closer in this task and this distance is smaller than the initial sensing range, and the initial sensing range is not larger than the maximum adjustable sensing range, we can consider the maximum adjustable sensing range is large enough such that the adjusted value will not be large than the maximum adjustable value.Certainly, if the initial sensing range is one or more orders of magnitude smaller than the maximum adjustable sensing range, the judgment for“large enough”can be more precise, even if there are some complicated factors, such as disturbances or obstacles, we can still consider that the maximum adjustable sensing range is large enough.However, with the same physical constraints,this“large enough”maximum adjustable sensing range possibly is not large enough in formation task.It can be observed that the judgment for“large enough”is supposed to be combined with the actual physical constraint and the specified task.
Then based on the Assumption 1, the communication management strategy will be presented in the Theorem 1.
Theorem 1:Consider a multi-agent system with the secondorder dynamics (1), and if there is a control input constraint denoted as
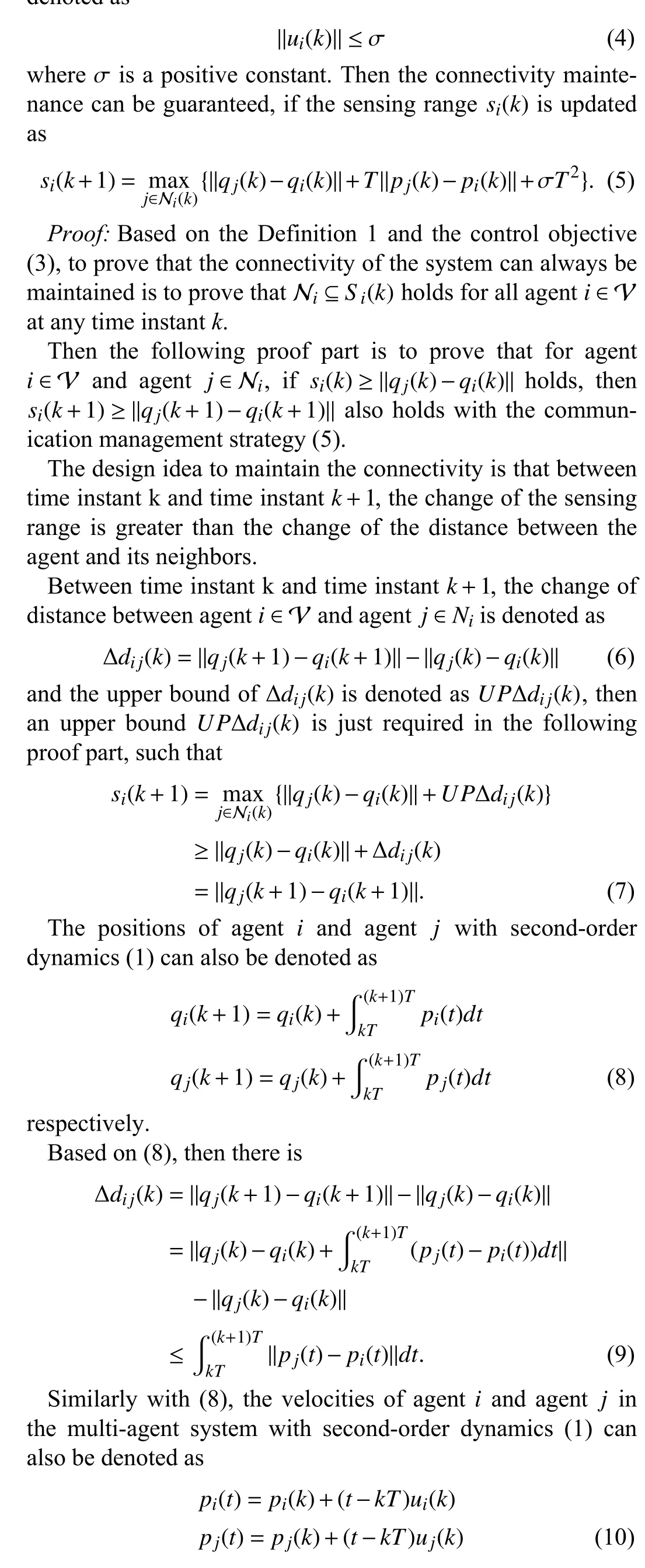
Based on (7), then the communication management strategy can be designed as (5), such that the connectivity of the system can always be maintained.■
It is noted that from Theorem 1, it can be observed that the proposed communication management strategy does not depend on a specified control strategy, but only has a demand that there is a control input constraint for every agent in the multi-agent system, which gives more freedom to develop a control strategy for finally achieving consensus.
B.Predictive Control Based Strategy
In this subsection, a predictive control based strategy is designed with the communication management strategy proposed in Theorem 1.
From Theorem 1, it can be found that for the system with communication management strategy, we should consider a control input constant (4) in the designing of the control strategy.Then in this subsection, we will design a predictive control based strategy with the control input constraint (4).
Before considering the control input constraint (4), we firstly design a predictive control based strategy without considering the control input constraint (4).
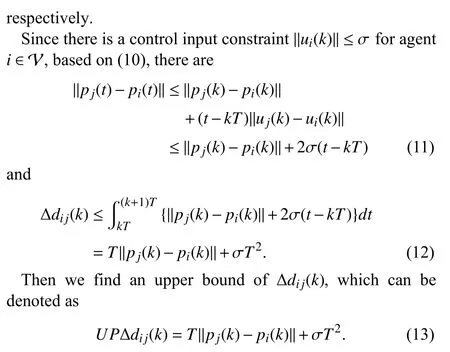
For agenti∈V, based on the dynamics (1) and our consensus objective, we firstly construct a cost function, which is defined as






It is noted that the connectivity maintenance is guaranteed by the Theorem 1, and the consensus is guaranteed by the Theorem 2.
An overall control structure for agenti∈V is presented in Fig.2.It is noted that in Fig.2, the states include the position states and the velocity states.At time instantk, for agenti∈V , based on the current sensing rangesi(k), all neighbor agentsj∈Niare sensed, and the statesxj(k) are obtained by agenti.By the communication management strategy, the value of sensing range at next time instant is calculated and saved, and the sensing range will be updated at next time instant.By the predictive control based strategy, the control input is calculated and the states will also be updated for the consensus.With this control structure for all agentsi∈V in the multi-agent system, the connectivity-maintaining consensus can be achieved.
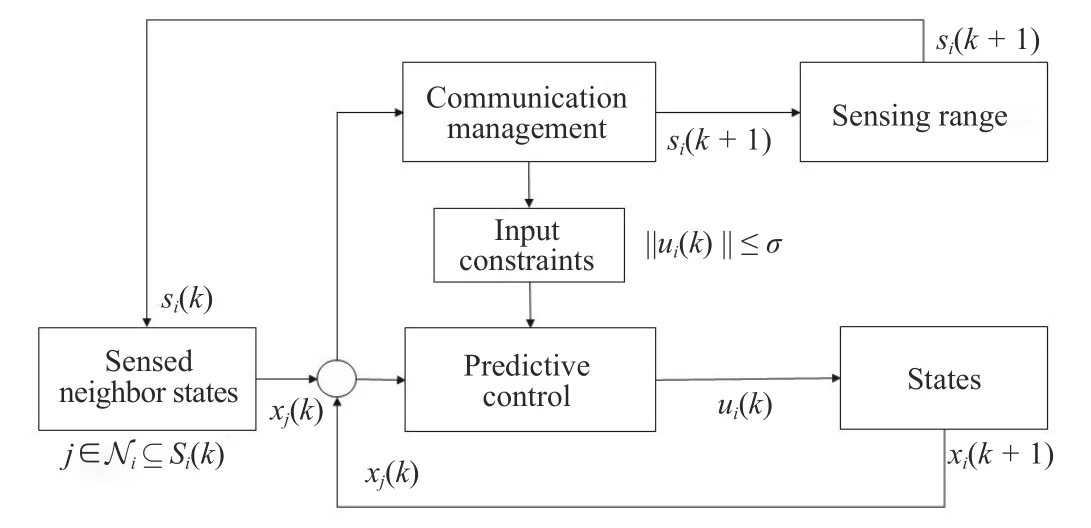
Fig.2.The overall control structure for agent i∈V.
Then the Algorithm 1 summarizes the overall scheme for the connectivity-maintaining consensus in this paper.
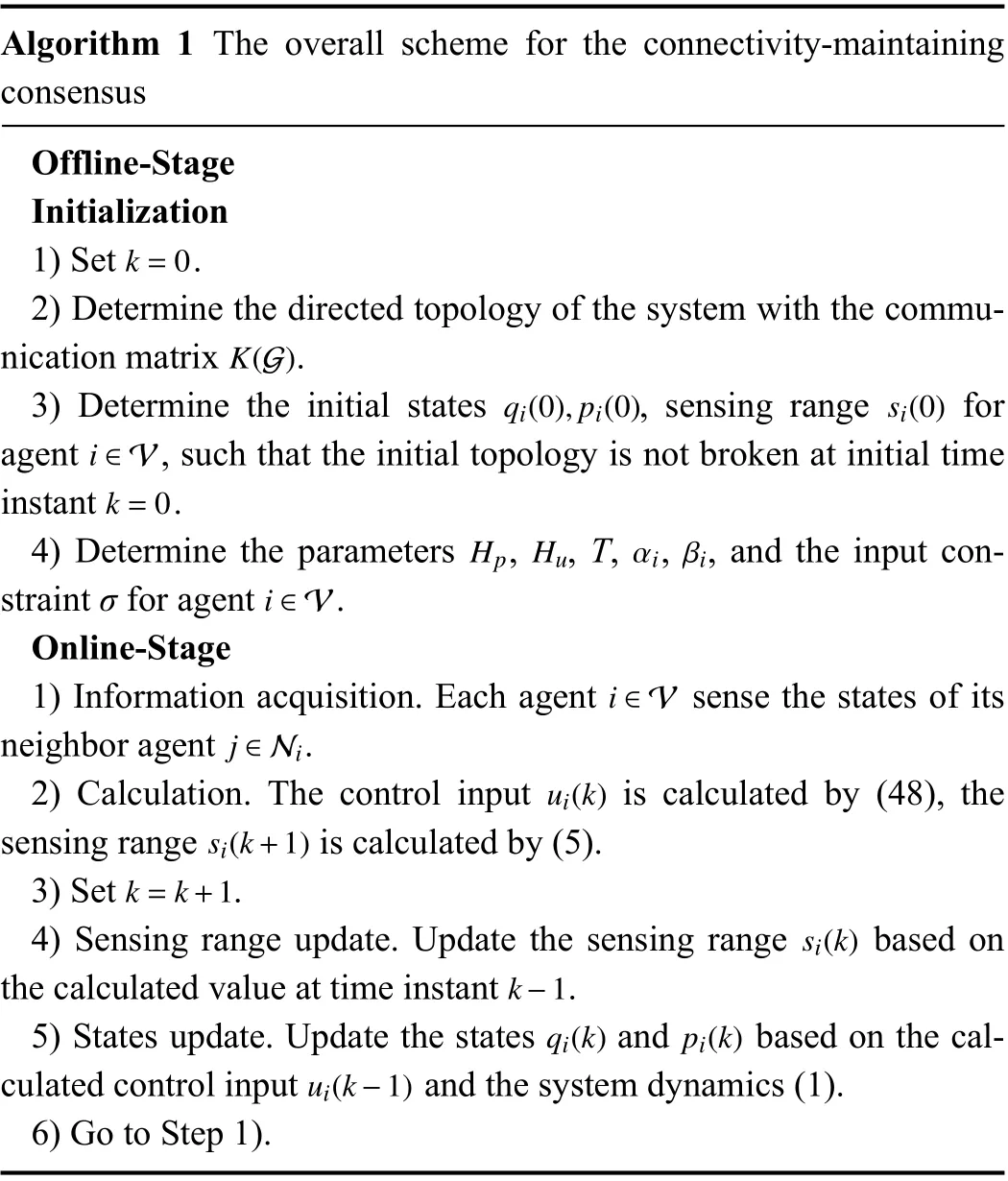
Algorithm 1 The overall scheme for the connectivity-maintaining consensus Offline-Stage Initializationk=0 1) Set.2) Determine the directed topology of the system with the communication matrix.qi(0),pi(0) si(0)i∈Vk=0K(G)3) Determine the initial states , sensing range for agent , such that the initial topology is not broken at initial time instant.Hp Huαiβii∈V 4) Determine the parameters , , T, , , and the input constraint σfor agent.Online-Stagei∈Vj∈Ni1) Information acquisition.Each agent sense the states of its neighbor agent.ui(k)si(k+1)2) Calculation.The control input is calculated by (48), the sensing range is calculated by (5).k=k+1 3) Set.4) Sensing range update.Update the sensing range based on the calculated value at time instant.qi(k) pi(k)ui(k−1)si(k)k−1 5) States update.Update the states and based on the calculated control input and the system dynamics (1).6) Go to Step 1).
It can be observed in Algorithm 1 that the update of the sensing range value is earlier than the time of information acquisition.Since the connectivity maintenance is guaranteed at any time instantkby Theorem 1, the information from neighbor agents can be obtained normally, which provides a basic guarantee for achieving consensus.
IV.SIMULATIONS
In this section, simulations will be shown to indicate the effectiveness and advantages of our scheme.
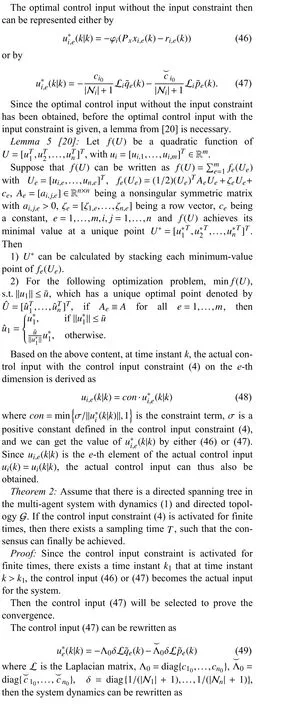
Consider a system with five agents, and the dimension of the states ism=2.And the topology of the system is presented in Fig.3.
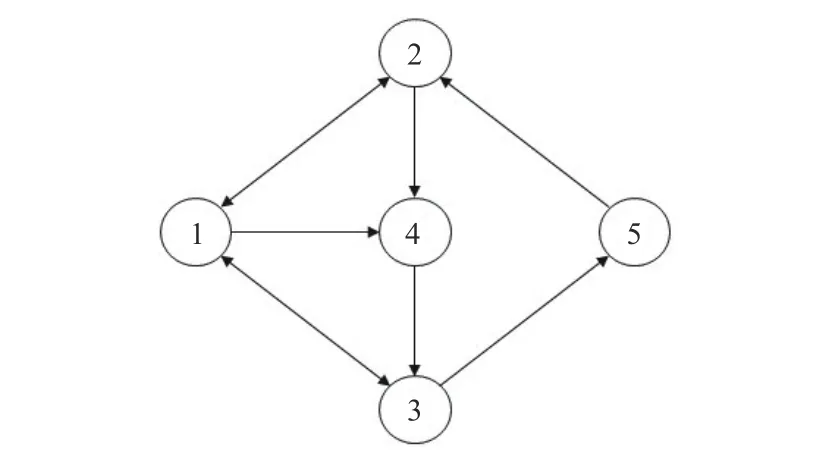
Fig.3.The topology of the multi-agent system.
For all agents in the system, the prediction horizonHpis set asHp=10, the control horizonHuis set asHu=8, the sampling periodTis set asT=0.1, the control input constraintσis set as σ=6 , and other parameters αiand βifor agenti∈V are set as αi=1 and βi=1.
Then for all agents, the position trajectories are presented in Fig.4, and the velocity trajectories are presented in Fig.5.Figs.4 and 5 show that the system finally achieves consensus.The control input evolutions are presented in Fig.6, which shows that the actual control input signal never exceeds the set input constraint σ =6.
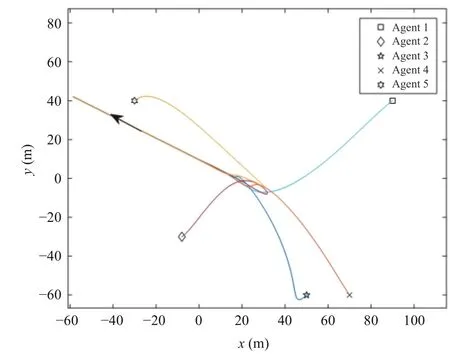
Fig.4.The position trajectories of all agents in the system.

Fig.5.The velocity trajectories of all agents in the system.
Remark 5:The reference trajectory of the system is predefined in (17), and it is noted that the reference trajectory of each agent is not fixed or predetermined, but it is calculated in real time based on the states of agent itself and its neighbors,and it will be recalculated at every time instant, which is different with navigation or path-following task [27].In addition,at one time instant, the reference trajectory of each agent is not the same, however, as the entire consensus task progresses, eventually the reference trajectory of each agent also tends to be consensus.Specially, if the initial states of agents change while other conditions remain unchanged, the final trajectory of the system will also change.

Fig.6.The control input evolutions of all agents in the system.
The sensing range evolutions of all agents are presented in Fig.7, which shows that the sensing ranges of all agents are finally decreased.
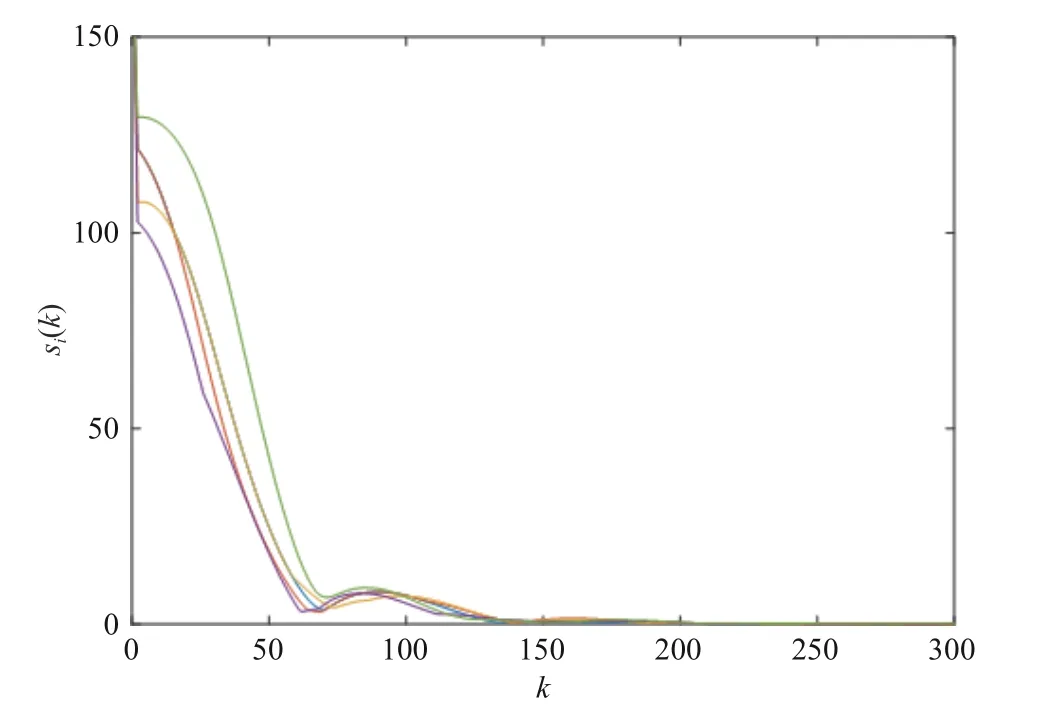
Fig.7.The sensing range evolutions of all agents in the system.
In order to indicate the time when the system achieves consensus, we define a new indextcnamed consensus time in the following:
with the consensus errorφ, andφis a small positive constant.
Meanwhile, in order to indicate the advantages of the overall scheme in this paper, for agenti∈V some indices used in[19] are defined in the follows.
The power consumption of communication can be modeled as
with the sensor type constants β ∈[2,6] and ε ∈R+, and the sensing rangesi(k).
Then the accumulated communication energy consumption is defined as
The consensus errorφdefined in (51) in this simulation is set as φ=0.5, and then we can get the consensus timetcin this simulation, which istc=131.The parameters ε and β that are defined in (52) are set as ε=1 and β=2.And the total communication energy consumption is presented in Fig.8,which indicates the great saving in communication energy by our scheme, and the results in Fig.8 show that if there is a communication management strategy for the system, then the communication energy can be greatly saved.Meanwhile, to better indicate the advantages of the overall scheme in this paper, the comparison of the communication energy consumption between the scheme in this paper and the scheme in [19]is presented in Fig.9.It can be observed that compared to the scheme in [19], by the scheme in this paper, all agents in the system consume less communication energy in the whole process.And the comparison of the communication energy saving is presented in Table I, which shows the advantages of the scheme in this paper.

Fig.8.The accumulated communication energy consumption.
V.CONCLUSION
The connectivity-maintaining consensus for multi-agent systems is investigated in this paper.And we propose a novel communication management strategy which is not associated with the specific control method but is compatible with different control methods, and with this strategy, the connectivity of the system can be maintained and the communication energy can be saved.A predictive control based strategy is designed with this novel communication management strategy in this paper, and the consensus can be guaranteed.By the scheme in this paper, the connectivity-maintaining consensus can be achieved, and meanwhile the communication energy can be saved.Compared to the related work in literature, our scheme can save more communication energy.
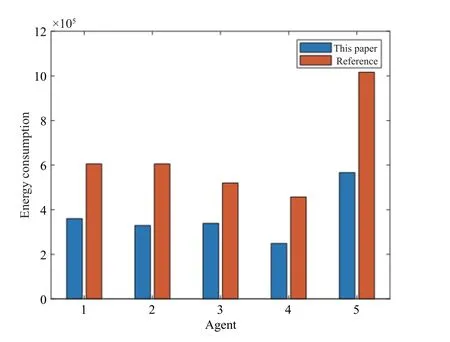
Fig.9.The accumulated communication energy consumption compared with [19].
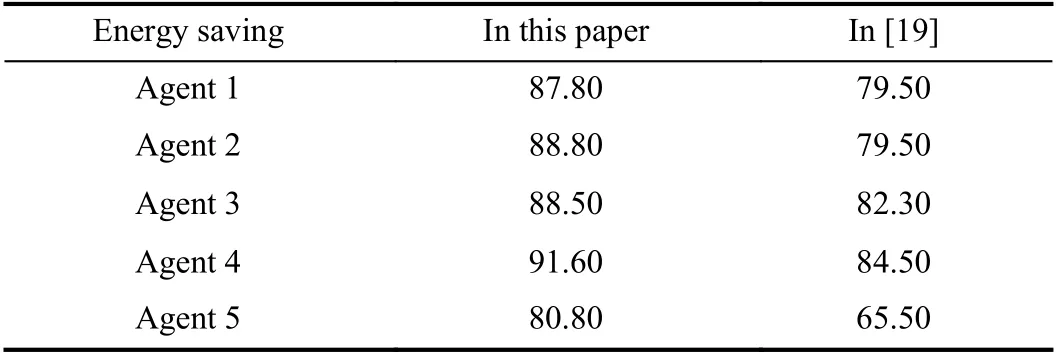
TABLE I COMPARISON OF THE COMMUNICATION ENERGY SAVING (%)
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Meta-Energy: When Integrated Energy Internet Meets Metaverse
- Cooperative Target Tracking of Multiple Autonomous Surface Vehicles Under Switching Interaction Topologies
- Distributed Momentum-Based Frank-Wolfe Algorithm for Stochastic Optimization
- A Survey on the Control Lyapunov Function and Control Barrier Function for Nonlinear-Affine Control Systems
- Squeezing More Past Knowledge for Online Class-Incremental Continual Learning
- Group Hybrid Coordination Control of Multi-Agent Systems With Time-Delays and Additive Noises