基于智能小车的乡村社区环境监管系统设计
2023-03-24王春宇张道诚徐宏伟姜林
王春宇 张道诚 徐宏伟 姜林

关键词: 智能小车;自动巡航;不文明行为识别;脏乱环境检测; 乡村环境治理
1 概述
建设美丽乡村,必须以生态为本,在乡村振兴战略的持续影响下,乡村社区治理工作逐渐受到重视[1]。但是,由于乡村社区生活环境治理受到各种因素影响,导致环境保护形势不容乐观,环境监管急需加强[2],新农村的社区环境建设仍存在很大问题。
随着乡村的日益发展,乡村治理手段日益增加,调查显示,我国现有乡村社区环境治理方法有如下几点:吴惟予、肖萍倡导从生态文明的角度引入契约关系,以环境自治契约为核心构建乡村环境契约管理体系[3];杨浩勃、黄斌欢、姚茂华支持限制政府支持市场的盈利倾向,并在乡村地区建立受国家、市场和社会影响的环境治理平衡[4];赵永峰基于长期健康的乡村综合治理视角,倡议健全乡政府管束机制,促进全民参与,完善法律管制[5];肖萍、朱国华认为,引入第三方治理是解决农村环境资本匮乏、法治缺失、主体不明等问题的重要途径[6]。
总体来说,我国乡村生活环境治理主要应用两种模式,一种是传统治理模式,另一种是新兴的PPP模式[7]。传统乡村社区生活环境治理模式属于“政府直控”模式。PPP模式主要是政府机构与私营部门进行合作,政府给予政策支持,私营部门通过产品及服务端实现乡村社区治理[8]。不论是传统治理模式还是新兴的PPP模式,均存在以下两点问题:
(1) 乡村社区环境治理中村民主体意识缺失[9]。“免费搭车者”现象在环境治理中较容易产生,从而“政府干、群众看”情形在某些地方成为一种常态。
(2) 政府主导作用发挥不充分[10]。该问题主要体现在管理体制的不完善,包括基层政府管理的碎片化、多头化等,造成对乡村社区生活环境治理监管的匮乏。
针对以上两点问题,本文提出一种基于智能小车的乡村社区智慧环境监管系统,实现对乡村社区环境进行治理。不同于传统的治理方式,它将搭载了自动巡航、脏乱环境检测、不文明行为识别、智能语音播报功能的小车投入乡村进行使用,通过智能小车协助管理人员,达到规范村民的行为、养成良好的环境意识、更好地治理环境的目的,从根本上对乡村社区环境进行整治。
2 系统架构
基于智能小车的乡村社区环境监管系统架构如图1所示,该系统以智能小车作为硬件平台在乡村社区进行自动巡航,主要负责图像数据采集,并将采集到的数据经由深度神经网络识别模型,将不文明行为识别结果和脏乱环境检测结果反馈至监管后台,乡村社区环境治理人员依据监管后台数据对乡村环境进行治理。
3 关键算法设计
3.1 自动巡航算法设计
自动巡航算法主要包括地图构建(Gmapping 算法)与路径规划(TEB 算法),自动巡航流程如图2所示。
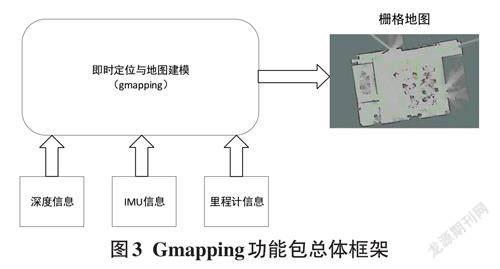
3.1.1Gmapping 算法
Gmapping 是2007 年由GiorgioGrisetti 和Cyrill?Stachniss等人提出的[11],它是一种基于Rao-Blackwellized粒子滤波器的二维激光SLAM技术。Gmapping可以实时构建环境地图,且地图精度较高,对激光雷达扫描频率要求较低等优势,因此,本文采用该算法进行实时定位与地图构建。
ROS提供了一個Gmapping的算法功能包,它的整体架构见图3,它可以为智能小车的深度信息、IMU信息、里程表信息以及在完成必要的参数设置后生成并输出二维网格图。
3.1.2 TEB 路径规划算法
TEB算法就是在起点与终点位姿的全局路径中以时间ΔTi 为间隔均匀插入N个中间位姿,对各个中间位姿施加约束。通过这个优化变形,找到满足各种约束的最终可行路径[12]。
设智能小车的n 个位姿Si = [ x ] i,yi,δi ,xi,yi 表示智能小车的位置信息,δi 表示方向。则智能小车的位姿有序序列为:
通过合并连续位姿的时间间隔,生成一个时间间隔序列:
智能小车的轨迹表示为:
加速度的约束是根据两个连续的平均速度计算,通过欧氏距离单位时间内的变化量计算,需要考虑三个连续位姿和相应的两个时间间隔:
规划出的路径以时间最优为目标,该方法代替了其他路径规划算法以路径最短为目标的做法,可使智能小车花费最短的时间到达目标点,时间约束的目标函数:
3.2 不文明行为识别与脏乱环境检测算法设计
考虑到计算机本身的性能问题以及便捷的云平台,最终模型的训练与导出均在飞桨平台AISTUDIO上完成,模型的部署及测试在树莓派上完成。
3.2.1 模型选择
本文本着略微降低精准性,极大提高推理速度的原则,对目标检测算法进行研究。经过对现有主流检测算法的资料查阅以及实验,发现PP-YOLOv2[13]算法不仅推理速度快,而且精确度高,故本文最终选用PP-YOLOv2模型。
3.2.2 模型训练
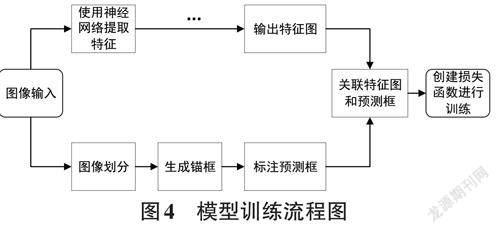
PP-YOLOv2模型的训练过程可以分成两部分,如图4所示:
上方支路使用卷积神经网络对图像进行特征提取,并对候选区域的位置和类别进行预测。特征图的大小随着网络不断向前传播而逐渐缩小,每一个像素点都表示了更为抽象的特征,直至最终得到特征图。下方分支则是按一定规则在图片上进行图像划分,然后生成锚框,根据候选框与真实框的位置关系,生成预测框。最后关联上方的特征图与下方的预测框,创建损失函数,对模型进行训练。
为了解决乡村街道图像中的环境复杂、少量的特征图难以得到高性能的不文明行为识别与脏乱环境检测模型的问题。
首先,扩大输入图像尺寸,扩大输入是为了增大目标区域,从而使网络更容易捕捉小尺幅目标的信息。
其次,在检测颈采用了FPN(特征金字塔网络)的变形之一——PAN[15(] 路径聚合网络)由顶部到底部进行特征信息聚合。检测颈采用的激活函数为在YO?LOv4和YOLOv5上表现良好的mish激活函数。
最后,为了解决最终的检测对象预测忽略了IoU的问题,本文采用将对象预测与IoU综合起来得到一个新的对象预测的做法:
3.2.3 模型的导出与部署
模型导出通过PaddleDection将训练好的模型进行导出,通过PaddleLite将导出模型转换为nb文件并嵌入树莓派,然后在树莓派端安装PaddleLite工具,最后在树莓派端利用PaddleLite工具进行相应的部署。
4 系统实验
4.1 硬件系统
本文的主体是EPRobot智能机器人小车,EPRobot智能机器人小车是计算机编程、机器人开发以及嵌入式系统开发等方向定制开发的学习平台。小车主要由树莓派4B、底盘控制器、激光雷达、深度相机、2个配有编码器的电机以及底盘组成。它内置了Ubuntu18.04操作系统,并安装了ROS-melodic版本的机器人开发框架,不仅可以进行嵌入式Linux系统以及ROS系统的实践与开发,同样能够非常方便快捷地实现各种机器人控制的算法与程序。
4.2 软件平台
为了能够通过一系列的指令实现对机器人小车的控制,使其完成同步定位与建图以及识别等工作。在个人PC端通过与机器人小车端连接进行数据关联,ROS 系统将数据无线传输,组建成一个完整的平台。
4.3 数据集介绍
PASCAL Visual Object Classes(简称PASCALVOC)[16] ,是一个世界级的计算机视觉挑战赛。2005年~2012年间,该视觉挑战赛每年都发布带标签的图像数据库并开展算法竞赛,由此产生了一系列数据集。本文使用的数据集为VOC格式数据集,其中,标签文件存放到Annotations 文件夹中,样本图集存入Images文件夹中。其中250张样本作为验证集,1575张样本图片作为训练集,675张样本作为测试集。
4.4 实验效果及讨论
智能小车通过巡航算法在乡村社区进行自动巡航,通过车载摄像头实时采集图像数据,运用不文明行为识别和脏乱环境检测算法识别不文明行为和检测脏乱环境。实验在学校教学楼旁道路展开,其场景整体较为适合模拟乡村社区道路模拟。实验结果如图5、图6所示。
5 结论
本文通过对乡村社区环境治理现有模式的研究发现,现有模式主要存在村民在环境治理过程中主體意识缺乏的弊端,针对这一问题,本文设计一种基于智能小车的乡村社区环境监管系统。该系统同传统治理方式不同,其在通过智能小车实现智能监管的同时,在很大程度上解决了村民主体意识缺乏的问题,从而有力推动了乡村振兴的建设。
