星载GNSS-R 监测海面目标技术进展
2023-03-23胡媛顾世森刘卫江志豪袁鑫泰
胡媛,顾世森,刘卫,江志豪,袁鑫泰
(1.上海海洋大学 工程学院 上海 201306;2.上海海事大学 商船学院 上海 201306)
0 引言
海洋占地球表面的71%,因此进行海面目标监测,对于国家海洋安全和海洋资源使用具有重要意义.对海冰、海面溢油以及海面船舶等实现精确实时监测,具有广泛的应用,如海面实施管控,监视海面交通,海洋污染监测.
传统的海面目标监测技术有微波监测和光学监测技术.光学监测技术中的遥感器容易受到天气影响,不能全天候的监测海面目标.微波遥感技术不受天气影响,具有全天候监测能力,但是对于大范围的海面目标进行持续监测,所需成本极高,并且由于它的观测模式为侧视扫描,成像会存在大量噪点,影响监测精度.全球卫星导航反射信号(GNSS-R)技术是一种新兴的遥感手段,是由欧空局科学家Martinneria[1]于1993年首次提出的被动反射和干涉系统(PARIS)的理论概念,其主要思想是利用导航卫星海面反射波作为测距信号.GNSS-R 技术不需要专门的发射机,在轨的导航卫星提供了丰富的免费信号,因此降低了监测成本[2].降雨、大雾等恶劣天气对反射信号的影响较小,有利于实现长时间对海面进行监测.GNSS-R 技术的引入,可以与传统海面监测方法做到优势互补.
1 GNSS-R 监测海面目标平台
使用GNSS-R 对海面特征参数进行反演的应用,Hall等[3]于1988年提出利用GPS 散射信号测量海面的设想.利用GNSS-R 进行海洋微波遥感,已成为GNSS 除了导航定位应用之外新的研究方向.这种新的海洋遥感手段,无需发射机、信号源丰富、时空分辨率高、成本低,是一种新型的全球海洋遥感数据采集手段.按照数据来源分类,可以将GNSS-R 数据分为:岸基、机载和星载数据.
1.1 岸基GNSS-R
通常将接收天线架设在岸边相对较高的地方,例如近海的岩石、高建筑或者山顶上,接收到的数据为岸基GNSS-R 数据.岸基GNSS-R 数据可以对特定区域进行长期稳定的观测,对近海域的监测具有重要作用.Soulat等[4]利用岸基GNSS-R 数据验证了反射信号时间序列与有效波高的关系.Fabra等[5]利用欧洲空间局在格陵兰岛迪斯科海岸采集的GPS 数据,使用相干相位差法对海冰进行监测,得到了较好的结果.1997年,Martin-neria等[6]在荷兰的Zeeland 桥利用岸基GNSS-R 数据进行了PARIS 高度计桥I、桥Ⅱ和桥Ⅲ试验,三次实验均反演出海面高度,其中实验桥Ⅲ试验测量误差小于10 cm[7].文献[8]利用北斗卫星岸基反射信号数据进行了特定的污油池油膜进行了监测实验,对油面的介电常数特性进行了研究.发现当水面有油污时,介电常数反演结果均值为3.6,标准差为2.13,这与油的真实介电常数范围2.0~4.5 一致,远小于海水介电常数,证明了应用岸基GNSS-R数据监测海面溢油具有可行性.
由于岸基接收机平台架设固定,高度低、探测区域有限,接收的反射信号数据相对于星载和机载数据,具有信号强度高、信号间相关性强和信号在时间延迟的拓展小等特点.岸基GNSS-R 数据在监测近海域海面具有广泛应用,不适用于远海岸和大范围区域.
1.2 机载GNSS-R
GNSS 信号接收机架设在飞机或其他飞行器上,可以得到机载GNSS-R 数据.1994年一架飞机偶然捕获到经海面反射的GPS 信号[9],随后对机载GNSS-R 数据进行了大量研究.1999年,NASA 兰利研究中心的研究人员通过对两组机载GNSS-R 数据与雷达卫星散射测量结果的研究发现[10],中等高度的接收机采集到的数据能够明显区分海冰和海水的反射系数.2000年,NOAA 利用飓风猎人号飞机搭载GNSS-R 接收机,通过机载数据成功获取风速[11].2004年,Ruffini等[12]进行了低空机载测量海面高度实验,并将结果与Jason-1 卫星测高结果进行比较,精度可达到10 cm.文献[13]利用安装在飞机上的多普勒延迟测绘接收机,在三亚附近海域进行了实时数据采集活动.初步实验结果表明,机载GPS 反射信号数据可以很好地用于舰船目标检测.2013年,Rodriguezalvarez等[14]通过对机载GNSS-R数据分析,建立了延迟多普勒图(DDM)与风速的线性关系,表明了DDM 可以提供更好的反演精度.2016年,文献[15]对加利福尼亚蒙特雷湾得到的机载GNSS-R 数据进行分析,使用三种反射信号到达时间跟踪算法,测量海面高度的精度达到0.6 cm.
机载数据与岸基数据均是对靠近海岸区域的监测,对星载监测海面起到补充作用.相对于岸基GNSS-R 数据,机载GNSS-R 数据可以对更远、更广的区域进行监测,并且接收机是安装在飞行器上,所以可以对监测区域进行灵活选择.但是由于机载探测海面时,飞行器的高度相对于岸基接收机的平台较高,GNSS 反射信号之间的相关性下降,岸基数据中观测量的敏感度会降低.
1.3 星载GNSS-R
接收机被搭载到小型卫星上进行反射信号收集,得到星载数据.星载GNSS-R 数据的发射卫星源较多,并且具有高时空分辨率,可以实现全天候、全天时、广覆盖的地球表面参数反演,与岸基、机载数据形成互补.1996年,Katzberg等[16]进行了有关在太空中使用接收器从海洋中接收散射GPS 信号的理论研究,Lowe等[17]对星载GPS 信号数据进行了首次研究.文献[18-20]通过获取UK-DMC 两组星载GNSSR 数据对海冰进行了监测,一组于2005年2月4日在阿拉斯加海岸附近获得,另一组于2005年6月23日在南大洋南极洲附近获得.通过与现场海冰数据验证,由第一组数据得到区域90%面积被30~70 cm 的海冰覆盖,第二组数据得到了海冰浓度介于70%~90%.2014年,英国发射了全球首个技术演示卫星(TDS-1),公布了数百万的GNSS-R 星载数据,这为研究人员推进研究提供了便利.Yan等[21]利用TDS-1 星载数据对海水和海冰进行了监测,结果表明,对海水和海冰的分辨率可达到99.73%.
通过在各种平台上部署多个GNSS-R 接收机,可以在全球和区域范围内实现时间和空间密集覆盖.以旋风全球导航卫星系统(CYGNSS)为例:平均重访时间为4 h[22],非相干散射的空间分辨率约为10 km,相干散射的空间分辨率约为500 m[23].
2 星载GNSS-R 监测海面常用方法
第一次获得的星载GNSS-R 数据来源于英国灾害监测星座(UK-DMC)卫星.文献[24-28]应用数据对海冰进行了监测.通过现场海冰验证,对两组星载GNSS-R 数据进行验证,发现DDM 中表现出较强的峰值和较小的扩散.它们的差异说明,粗糙的海水表面会降低整体相干镜面反射,并导致较大的闪烁区.分析表明,利用星载GNSS-R 监测海冰区域是可行的.此外,不同的信号功率、时延和多普勒扩展程度与不同的海冰厚度有关,说明GNSS-R 具有监测海冰厚度的潜力.文献[19]中提到,对于从冰面反射的相干信号,可以恢复载波相位信息以进行精确的测高测量.2014年TDS-1 发射后,数百万的GNSS-R 的 DDM数据已向公众提供,这为研究人员提供了更多研究机会.使用TDS-1 的DDM 于海冰监测的实验有文献[24-27],现有的研究主要集中在监测海冰厚度和海面船舶和溢油等方面.由于监测海面目标的方法种类繁多,将在第2.2-2.4 节中讨论.分别从基于DDM、基于散射系数反演监测和基于机器学习监测三种方法总结了监测海面目标的研究进展.
2.1 基于DDM 观测值信息提取
海面闪烁区散射功率在时间延迟和多普勒延迟的映射被称为DDM,如图1 所示.TDS-1 获取的DDM 数据首次应用于监测的海面目标是海冰[28],使用的是评估DDMs 中提取的监测值.同时,文献[24]研究了不同观测值下的海冰探测应用.DDM观测值最初是用来描述DDM 的扩散程度,它由表面粗糙度决定,用来监测海面目标的观测值[29-35],描述如下:
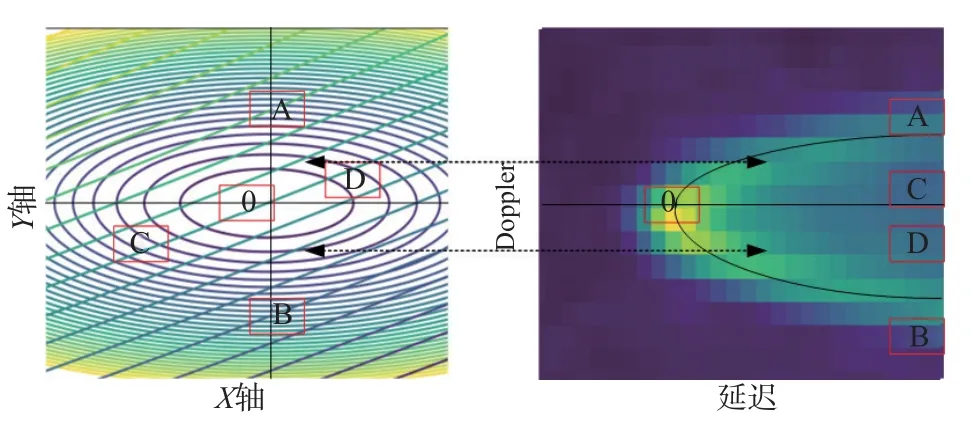
图1 DDM 示意图
1)比预设阈值的DDM 具有更大功率的DDM像素数.
2)标准化的DDM 的功率总和.
3)从标准化DDM 中心像素点[GCT,GCF]到最大像素点[MAXT,MAXF]的距离,计算公式为
式中,G Cτ和G Cf分别为延迟和多普勒像素的平均值.
4)归一化DDM 在其峰值附近的平均值.
5)多普勒积分波形的斜率.
6)所获得的多普勒积分波形和Woodward 模糊函数(WAF)的多普勒之间的相关系数.
7)目标区域的标准差.
目标DDMs 与海水DDMs 的区别在于扩散程度不同,典型的海水DDMs 具有更大的扩散性.上述观测值能够描述DDM 的传播范围.对于1)~4)观测值,较大的值对应于更大的扩散.然而,对于5)~7)观测值,较小的值表示更大的扩散.因此,可以通过将可观测到的DDM 值与其相应的阈值进行比较来实现海面目标监测.
2.2 基于散射系数目标反演
利用DDM 观测数据进行海面目标监测是一种有效的方法.然而,详细空间分布很难利用这些观测值来解释.通过将散射系数(σ0)反演到空间域中,文献[36-41]提供了监测海面目标及其分布的新方法.文献[36-37]是基于反卷积法.文献[38-39]中的方法涉及空间积分法(SIA).文献[40-41]中的方法是基于二维截断奇异值分解(TSVD).DDM 描述了GNSS-R,可使用Zavorotny-Voronovich(ZV)模型[39]进行描述,GNSS-R 二维相关功率可以表示为二维卷积
χ为伍德沃德模糊函数(WAF),可以表示为
式中:Ti为相干积分时间;τc是C/A 码芯片的长度.
Σ为Sigma 函数,它包含了表面特性、几何结构、天线方向图.2009年在文献[41]提出了延迟和多普勒值的显式表达式,利用空间和延迟-多普勒域之间对应关系,通过雅可比矩阵快速计算DDMs.Sigma函数被表示为
式中:D为天线辐射模式;σ0为观测表面的散射系数;R0为每个表面点到接收器的距离;R为每个表面点到发射器的距离;J为从物理域到延迟多普勒域的域变换产生的Jacobian 函数.
在反演散射系数时,需要先获得Sigma 函数.可以应用以下三种方法.
2.2.1 反卷积法
首先利用CLS 滤波器,由等式(2)得到Sigma 函数的估计值
将(8)式代入(7)式中得到
式中,P为平滑准则函数,由 γ参数加权.将得到Sigma 函数的估计值代入式(6)中,得到表面散射系数
2.2.2 基于空间积分法
通过精确地考虑每个空间点的贡献,基于ZV 模型首次提出SIA[42].将式(2)中Sigma 函数表示为
式中,A为反射面的面积.用反卷积方法中的公式求得Sigma 函数的估计值,代入式(11)中得到散射系数
此方法中,由于 δ函数的影响,每个延迟多普勒(DD)点的积分范围是其对应的空间点簇.所以此方法的优点是,在整个DD 域中确定散射系数只需对每个空间点进行一次积分.利用空间域和DD 域之间的关系,可以将DD 域中的散射系数分布映射到空间域中.2014年,Li等[43]对监测海面溢油进行了研究,将星下点溢油监测的仿真场景(90°的固定仰角)扩展到任意角度,进一步扩展了星载GNSS-R 监测海面的卫星仰角范围.
2.2.3 TSVD
Schiavulli等[44]提出了一种基于TSVD 的反演方案,从包含不同非均匀区域的模拟海洋场景相关的噪声DDM(包括热噪声)中重建散射系数.首先,功率分布的数学表达式为
从数学的观点出发,式(13)表达为
式中:L(·)为卷积算子;X为散射功率;B为相对应的DDM.将X和B矢量化后,式(13)可以写成矩阵形式
式中:A是一个n×n矩阵,其大小使得Ax近似于式(14);b是测量DDM 的离散化值.
用正则化方法求解方程(14).正则化方法的基本思想是使残差范数最小.该方法可以表示为
式中,P代表进行最小化的空间.根据二维TSVD 方法[45],通过奇异值分解得到式(15)的解,使用截断奇异值分解来滤除含噪的奇异值,得到正则解.因此,TSVD 解中只包含前k个奇异值
这三种方法都能定性地监测到海面目标的存在.然而,基于二维TSVD 的方法依赖于视觉检测来解决模糊问题,可能耗时且不能自动进行,意味该方法的应用范围十分有限.
2.3 基于机器学习监测海面目标
近年来,因为机器学习能够直接从数据中构建遥感数据与目标遥感数据之间的关系,所以它被作为一种新的遥感图像处理方法而广泛使用.此外,机器学习方法已经成功地应用于海冰监测,例如,合成孔径雷达[46]、高度计[47]和被动微波数据[48].一般的机器学习过程包括三个步骤:遥感数据的预处理、训练和测试.星载GNSS-R 数据进行目标监测的机器学习技术主要有三种.
2.3.1 神经网络
在输入到神经网络(NN)之前,每个DDM 都经过了噪声去除、归一化和数据拉伸的预处理.为了减轻噪声影响,每个DDM 去除噪声底,该噪声底被确定为无信号像素(包含所有多普勒像素的前四个延迟像素)的平均值.比如,TDS-1 的DDM 数据由128 个延迟单元(分辨率244 ns)和20 个多普勒单元(分辨率500 Hz)组成.然后每个DDM 根据其峰值功率进行归一化,峰值功率由DDM 中的局部极大值确定.基于局部极大值选择信号值,然后将二维信号值转化为一个字典序向量,该向量包含800 个元素,是NN的输入.
利用所构造的神经网络,训练过程开始确定权重和偏差,可采用反向传播学习[49]和Levenberg-Marquardt算法[50].详细公式见文献[51].利用DDM 数据的训练集及其对应的海水/冰标签数据进行学习,将处理后的DDM 输入训练后的神经网络,生成海冰监测结果.
2.3.2 卷积神经网络和支持向量机
与NNs 相比,卷积神经网络(CNN)部署了额外的卷积层.卷积层直接与输入的二维DDM 交互,保持相邻DDM 像素之间的相关性.池层的使用有助于减少数据中的冗余,并使CNN 对DDM 数据的不对称敏感性降低.CNN 的数据预处理比NN 少,包括噪声去除和归一化.文献[52]设计了一个CNN 架构,包含1 个卷积层(由5 个7*7 滤波器组成),然后是1 个2*2 池层和2 个完全连接层(其功能类似于NN的输入层和隐藏层).卷积层φ的使用可以描述为
式中,a、b、hk和Hk是输入、偏差、第k卷积图像(k∈[1,5])和滤波器.*为卷积运算.
支持向量机(SVM)[53]能够通过找到一个超平面来进行分类任务,并且能够提供比其他分类模型更好的精度[54-55].在文献[55]中,除了噪声归一化外,还进行了另一个特征提取过程作为预处理,即计算每个多普勒沿延迟轴的平均值.这样一个由20 个元素组成的数组被其最大值归一化,并因此保留为特征向量.
通过分析发现,当使用原始输入大小时,基于CNN 的海冰监测显示出比基于NN 更高的精度.CNN 的一个优点是在卷积层结合滤波器,可以降低DDM 中的噪声.卷积层和池层使得CNN 对DDM 反射点的不对称敏感性降低.然而,当通过裁剪DDM对数据进行适当预处理时,CNN和NN 都可以产生良好的结果.基于SVM 的目标监测方法相对于基于NN和CNN(以原始DDM 图像为输入)的方法具有更高的精度.
3 结束语
表1 总结了利用星载GNSS-R 进行的海面目标监测研究.基于机器学习的方法相对于基于DDM 观测值的方法,在监测海冰时候的检测精度有所提升.这是因为,机器学习完全依赖于数据的学习过程进行分类,而DDM 观测值是基于研究者的筛选.海冰DDMs 与海水DDMs 之间的差异是明显的,可以用推导得到的观测值进行研究.因此,利用DDM 观测值进行海面目标监测的结果精度具有真实性.利用星载GNSS-R 监测海面目标类型分类和具体规模等复杂问题具有难度,在这种情况下可以采用与岸基GNSS-R、机载GNSS-R 相结合,实现更复杂的监测.

表1 星载GNSS-R 监测海面目标的应用
全球气候变化关系到人类的可持续发展,海洋面积占全球面积71%,在全球气候变化研究中占据重要地位,而系统的高质量连续获取海洋环境的信息又是实现高水平海面变化研究的前提条件.在现有的探测海面体系中,应当有效地将基于卫星遥感观测与近海站点观测相结合,将近海海面和大洋面监测相衔接.需加快建立以卫星为主的空基平台、星载平台、沿海观测站点和GNSS 联合的海平面综合监测体系,进而构建长期、连续、稳定的高质量海平面监测模式,为海面监测和全球气候变化研究等提供有力保障.