一种多关节仿生变色龙机器人设计
2023-03-23钟耀鹏郭鸿桢李锐圳谭凯元
邓 君,钟耀鹏,郭鸿桢,李锐圳,谭凯元
(1.东莞理工学院机械工程学院,广东东莞 523000 2.东莞理工学院电子工程与智能化学院,广东东莞 523000)
0 引言
仿生技术是近些年在工程技术与生物科学发展起来的学科。仿生学思想在生物学和技术之间架起了桥梁,为解决技术问题提供了帮助。通过模仿生物学原理,人类不仅找到了技术解决方案,还完全适应了大自然的需要。
目前仿生技术主要研究方向包括仿生机器人技术、智能系统群体通信技术、仿生感知与信息处理技术、合成生物学仿生技术。仿生机器人在军事、工业、农业、医学等诸多领域被广泛应用。爬行机器人作为特种机器人的一种,可以在环境复杂的条件下进行特定的作业,受到人们的重视,为完善该领域技术,对仿生爬行机器人的研究已成为机器人技术发展的重要方向[1]。
四足爬行机器人能够在许多崎岖地形爬行,与其他类型的爬行机器人相比,它在行走时有更好的稳定性以及更强大的负载能力,具有结构简单、稳定性高等优点,而四足动物是四足仿生机器人的重要灵感来源。瑞士EPFL机器人专家以火蜥蜴为模型,设计了一种仿生机器人Pleurobot。瑞士团队通过设计Pleurobot[2]提供了所有活动的关节转矩控制,这使得可以应用神经网络模型的脊髓神经回路的蝾螈和激活虚拟肌肉模拟记录动物运动以及现实的粘弹性性质,了解脊椎动物运动控制原理。
本文作者团队将以仿生机器人Pleurobot 为原型,从机械结构、电气控制两个部分设计制作“变色龙机器人”。在SolidWorks 建立机器人机械模型,最后将实物组装出来,验证其能动性。
1 电路控制部分
根据实现舵机驱动和变色的两个效果,控制逻辑如图1所示。
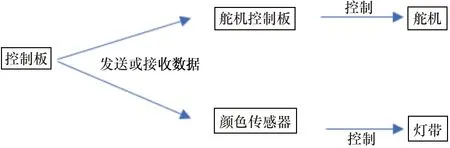
图1 控制逻辑
1.1 舵机控制
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。在高档遥控玩具,如飞机、潜艇模型,遥控机器人中已经得到了普遍应用。爬行机器人的运动由各个关节一定幅度的转动带动,同时普通的舵机具有扭矩大的特点,能够支撑起带动机器人。因此在设计变色龙机器人时,每个关节由舵机及其打印件组成。
变色龙选用的舵机是20 kg的直流伺服舵机,用传统的PWM 协议,对PWM 信号要求较低,在接受一次信号后可以位置自锁,减少控制板的CPU 负载[3]。舵机控制器读取输出电压,确定转动角度,将该角度和目的角度作对比,如果有角度偏差就再次输出PWM 信号重新调整。数字舵机是由一定占空比的PWM 信号来驱动的,驱动舵机旋转的PWM 信号一般是周期为20 ms 左右的脉冲信号。舵机的角度是由PWM信号的高电平占空比来决定的,舵机的转速度取决于PWM 信号的频率,频率越高,舵机转速越快[4]。采用市面上的舵机控制板来对变色龙进行控制。
1.2 颜色传感器模块以及变色模块
变色龙是蜥蜴中的一种,而跟其他品种的蜥蜴相比较,最为突出的特征就是其变色能力,适应环境的生存能力极强,通过改变体色来隐藏自己。
自然界中,变色龙因为其眼睛受外界光线的刺激后,它的中枢神经能够将光线的刺激传给体内,变色龙体内贮存着黄、绿、蓝、紫、黑等各种不同色素细胞,一旦周围的光线、温度和湿度发生了巨大变化,变色龙的表皮组织结构也会随之发生变化。这时变色龙看到什么颜色,身体表面就会变成什么颜色。
选用Arduino作为控制主板,还有TCS3200颜色传感器以及RGB 灯WS2812 构成变色龙的变色系统。Ws2812b 是集控制电路和发光电路于一体的智能外控LED 光源。像素点内部包含了智能发展数字接口数据锁存信号整形放大驱动系统电路,还包含有高精度的内部控制振荡器,有效保证了像素点光的颜色准确度,Arduino 可以通过输出RGB 数值,控制该模块的颜色状态,从而实现变色的效果。
通常各种颜色能够根据三基色理论,将红绿蓝三基色按不同比例混合制成其他各种颜色。
根据上述原理,只要知道了3 个颜色各自的颜色数值,就能得出对应的颜色。对于TCS3200 来说,当选定一个不同颜色滤波器时,它只允许特定的原色通过,阻止其他原色通过。例如,在选择红色滤光片时,只有红色才能通过,蓝色和绿色被阻挡,从而得到红光的强度;同理可获得蓝光和绿光的强度。通过分析这3 个不同光强值,就可以分析出反射到TCS3200D 传感器上的光的颜色。TCS3200D 传感器有4 个滤光片,红色、绿色和蓝色,并且是透明的。滤光片模式可以通过其引脚S2和S3的高电平和低电平来选择,如图2所示[5]。
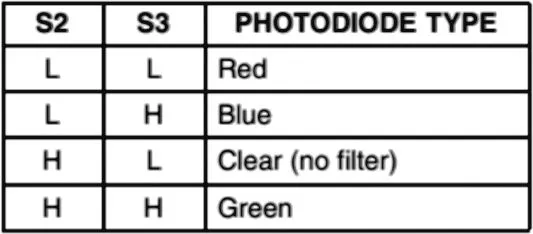
图2 S2、S3通道与滤波片关系
TCS3200D有可编程的彩色光到电信号进行频率的转换器,当被测物体反射光的红、绿、蓝三色光线分别到达TAOS TCS3200RGB感应芯片时,其内置的振荡器会输出一个方波,方波信号频率与所感应的光强成比例之间关系,光线作用越强,内置的振荡器产生方波出现频率越来越高。TCS3200 传感器具有OUT 引脚,其输出信号的频率也与内置振荡器的频率成比例,其比率因子可以通过其引脚S0和S1的高电平和低电平来选择,如图3所示。

图3 S2、S3通道与输出信号频率关系
通过白平衡校正来得到RGB 比例因子。反射光中红、绿、蓝三色光对应的TCS3200 输出信号1 s 内脉冲数分别乘以R、G、B 比例因子,就可换算出了被测物体的RGB标准值了。因此能够通过TCS3200 传感器传入数据到控制板计算出传感器的RGB 数值,再由控制板输出该数值到WS2818B 上,实现检测到什么颜色就转变成什么颜色,如图4所示。
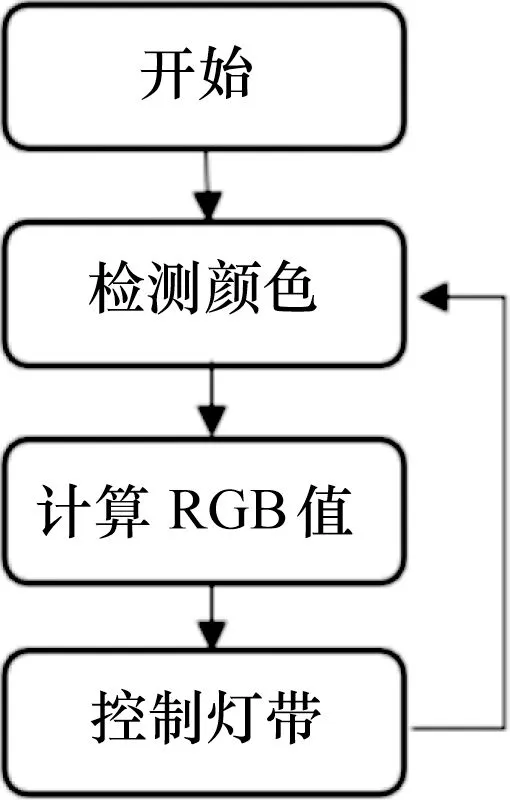
图4 变色流程
2 变色龙机器人结构设计
2.1 尾部结构
本节首先要解决的就是生物行为特征模仿及其结构设计的问题,因变色龙与蜥蜴同属一个亚目,以蜥蜴作为参考方向。
与变色龙的尾部不同,大多数蜥蜴拥有圆长且末端尖细的尾部,能作屈曲运动,吸引敌害的注意力,变色龙的尾巴相比于大部分蜥蜴,更加灵活且功能性强,经常呈现蜷曲的状态,能够保持身体平衡,帮助其缠绕树枝,在树枝上爬行。
2.1.1 齿轮设计
结构设计上,假如尾部既需要协调脊椎和四足的摆动,又要满足变色龙尾部蜷曲的特征,光靠二维方向上运动的电机来说,无疑是一个难点,为了实现结构的分部设计,采用能够协调脊椎和四肢运动的尾部齿轮结构,而暂时不考虑变色龙尾部蜷曲的特性,待水平方向摆动结构设计完成以后,再加以改进,添加变色龙尾部蜷曲的特征结构,因此目前先讨论水平方向的摆动结构。
为了尾部长度大小适宜,用3D 打印技术获得了一系列的齿轮零件,齿轮采用模数为2,齿数14 的齿轮,另一部分配合的零件同样是该尺寸的齿轮,只不过这些零件是由两个相同大小的齿轮拼在一起,具体如图5所示。
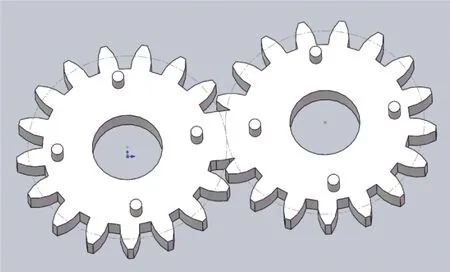
图5 齿轮零件
该部件的特点是,两个齿轮圆心距刚好为齿轮半径的2 倍,尾部只用到一个单齿轮零件作为原动件,由电机带动齿轮的转动,其余都是双齿轮零部件,作为尾部的从动件,齿轮装配如图6 所示。特点:上下每个齿轮时刻都保持同轴心,且上下层的齿轮与齿轮之间的圆心距始终保持不变,为齿轮半径的两倍,电机带动单齿轮零件转动的同时,后面的齿轮也随之转动,且单齿轮零件与双齿轮零件转动方向相反,双齿轮零件之间的转动方向相同,从整体上来看,能够产生摆动的效果。只要控制电机转动的方向和时间,就能实现左右来回摆动。

图6 齿轮摆尾
2.1.2 齿轮圆心分析
先讨论该结构向一侧摆动的情况,假设原动件转动角速度为W,半径为R,线速度为V,线位移为S,转动角度θ,转动时间t→0,装配图有5 个齿轮零部件,以转动齿轮轴心为原点建立平面坐标系,初始时刻呈直线位于坐标系X轴上,计算5 个齿轮轴心向一侧摆动不同时刻的坐标位置。
W1上R=W2上R轴心O2,O3相对X轴角位移α23=W2上·t=W1上·t,O1(0,0)、O2(2R,0)、O3(2R(1+cosα),2Rsinα)
由齿轮1∶1线性传动关系公式:
可知W1上=W3下,因此可以推出该机械结构,每一个齿轮的角速度和线速度相同,OnOn-1与On-1On-2的夹角,即相对转角β相同,且α23=W1上·t=α=β,α34=2β,αnn+1=(n-1)β,X4=2R(1+cosβ+cos2β),Y4=2R(sinβ+sin2β)。
第4 个轴心坐标:O4(2R(1+cosβ+cos2β),2R(sinβ+sin2β))。

同时根据尾部齿轮结构特性,要想实现摆尾功能,至少需要3个零件,也就是说,齿轮轴心坐标至少有3个以上。为了更加直观地了解结构的几何关系,证明上述坐标计算的正确性,以原动件轴心O1为圆心,建立X、Y坐标系。如图7所示。

图7 齿轮圆心坐标
根据上面的计算,设Φ1=α23、Φ5=α34、Φ1=W1上·t=β,根据几何关系可得Φ1=Φ2=Φ3=β,由于每个齿轮角速度相等,故Φ4=Φ1=β、Φ5=α34=2β,由此可以算出第n个轴心的坐标On。
2.1.3 圆心n与傅里叶公式
按照尾部结构来回摆动的运动过程,将最后一个齿轮距离坐标原点最远距离处的轴心点在X,Y坐标系上描出,作出了尾巴摆动的运动轨迹点画线,如图8所示。
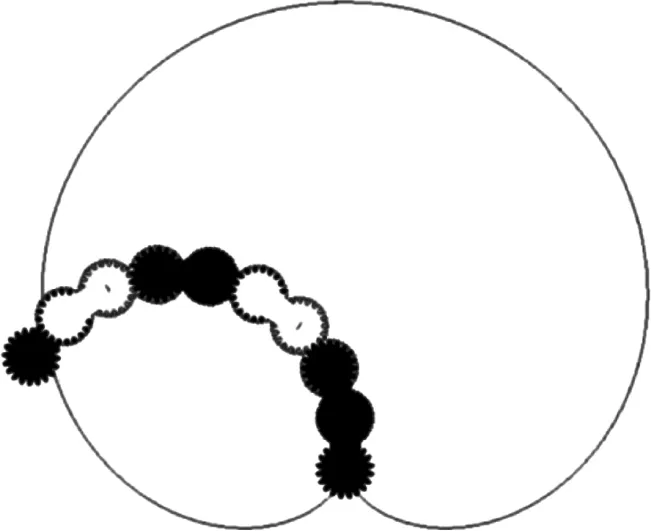
图8 摆尾轨迹
通过观察轴心坐标On的一般式,很容易发现,其Xn+Yn形式与傅里叶级数方程十分相似,对于实值函数,函数的傅里叶级数可以写成:
式(2)与式(3)比较a0=4R,an、bn恒等于2R,W1=2π/T
当轴心坐标数n→∞,n-2→∞时,式(4)为傅里叶级数形式。
2.2 脊椎设计思路
脊椎是爬行类动物是十分重要的身体结构,尤其是对蜥蜴来说,能够支撑身体,完成各种复杂的生命活动,同时,脊椎与四肢的协调运动,有助于蜥蜴快速移动,提高自身存活率。变色龙也不例外,很多身体结构都有相似之处。在仿生机器人设计中,四足机器人的四足与脊椎的运动协调,步态设计都很关键,能够解决这两个问题,仿生项目就算完成了一半,这里涉及到机械结构设计和电机步态程序设计两个难点。脊椎的设计对步态稳定裕度有相当大的影响。
通过观察爬行类动物的行为特征,不难发现,像蜥蜴在爬行的过程中,脊椎始终处于S型曲线摆动的状态,通过来回摆动,协调四肢的运动,并且摆动只局限于水平方向,这使得结构设计能够简单化,也想到了用舵机相继连接的方法实现脊椎的曲线摆动。对于舵机的要求,选择动力参数为20 kg 的直流伺服舵机,该舵机质量轻巧,且该动力能够支撑,并在设计脊椎底盘时,采用加厚和牢固的三角结构达到脊椎支撑的目的。然后就是考虑如何使身体部分外表更加美观,摆动时各个脊椎关节不会发生相互挤压,剩下的在实物调试中进行检测。图9所示为团队设计的脊椎骨架。

图9 变色龙主要骨架
3 步态及其模拟
四足机器人在爬行过程中,腿部结构遵循一定的规律进行运动,每个舵机都具有一定的运动规律,通过腿部在时间与空间的协调过程实现了机器人语气的步行运动,这就是四足机器人的步态。步态是四足机器人各条腿相互配合,协调运动的方式,是机器人运动的研究基础[6]。
3.1 蜥蜴行进过程
首先,通过蜥蜴运动的俯视图分析,得知蜥蜴运动大致可分为4 种状态,图10 所示为行进过程简图。帧1:躯干微微左弯,为右前肢与左后肢的前摆做准备。帧2:躯干左弯,右前肢与左后肢向前摆动,左前肢与右后肢向后蹬地。帧3:躯干微微右弯,为左前肢与右后肢的前摆做准备,与帧1互为镜面对称。帧4:躯干右弯,右前肢与左后肢向前摆动,左前肢与右后肢向后蹬地,与帧2互为镜面对称[7]。

图10 爬行过程4种状态

图11 四足机器人腿分布
3.2 机器人步态
四足机器人步态可分为静态步态和动态步态。静态步态指每一时刻机器人至少有3 条以上支撑腿(立于地面的腿)的行走步态。动态步态指每一时刻有少于3 条支撑腿的行走步态。静态步态稳定性较高,控制较为简单,但是移动速度较慢。动态步态稳定性较差,控制复杂,但移动较快[8]。
McGhee 和Frank[9]在1968 年研究了静态步态中四足机器人的步态顺序,指出四足机器人在第一条迈腿确定的情况下,一共有6个可行的迈腿序列。
如果先迈4 号腿,则迈腿序列4-1-2-3、4-1-3-2、4-2-1-3、4-2-3-1、4-3-1-2、4-3-2-1。McGhee 和Frank 对比了四足机器人上述6 种迈腿序列的稳定性,发现采用4-2-3-1 这种迈腿序列时机器人能达到最大稳定性。
结合3.1节蜥蜴运动仰视图分析和上述迈腿序列,在程序编写上控制舵机,模拟出了变色龙机器人行走步态,如图12所示。

图12 四足机器人爬行过程的4种状态
3.3 稳定裕度
四足机器人行走时,经常会有腿悬空,造成机器人失去重心的情况。对于分析四足机器人稳定性有很多种方法,其中,最常用的是稳定裕度方法[10]。1985 年Messuri[11]提出能量稳定裕度,他的定义是为将机器人绕着支撑多边形的某条边界线翻倒所需要的最小能量,公式为:
式中:i为支撑多边形的编号;hi为绕着对应支撑多边形翻转时机器人质心的高度变化量。犹豫考虑了质心在空间上的位置变化情况和机器人所能应对的外界干扰能量。
Hirose[12]将能量稳定裕度与机器人自身重力的比值定义为正则化的能量稳定裕度(Normalized Energy Stability Margin,NESM),即:
由式(6)可得正规化的能量稳定裕度最小值(NESM)为质点到支撑多边形的最短距离。如图13所示。
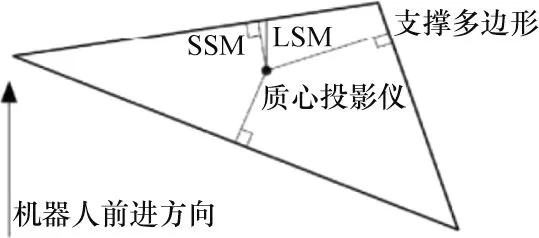
图13 质心到支撑多边形的距离
钱玉恒等[7]证明,可得结论可得纵向稳定裕度的增量部分随躯干扭动角度的增大而单调增加。因此灵巧扭动躯干能够提升四足机器人的稳定性裕度,也说明为什么蜥蜴等四足动物为何经常扭动躯干。
4 结束语
本文较为详细地介绍了变色龙机器人结构设计、电路控制等内容,分析了齿轮摆尾在坐标系中的数学式,讨论了式子与傅里叶函数的数学关系,解决了机器人如何在爬行过程根据环境变色,以及讨论了变色龙静止步态下它的稳定裕度和按照什么顺序迈腿行走最稳定。最终通过对机器人实际运行流畅,证明了该变色龙机器人的正常运行,爬行稳定和摆尾结构能够在四足爬行机器人身上得到应用。最后针对变色龙机器人在各个领域的运用,比如生态领域等运用,可以继续开展变色龙机器人在如何作为检测设备方面的研究。
