固定翼无人机续航技术研究进展*
2023-03-23艾春南胡连信赵田田刘紫怡王泽峰
艾春南,胡连信,赵田田,刘紫怡,王泽峰※
(1.湖州师范学院-湖州市水域机器人技术重点实验室,浙江湖州 313000;2.湖州师范学院信息工程学院,浙江湖州 313000)
0 引言
在《中国制造2025》的时代背景下,我国从固定翼无人机到多旋翼无人机得到井喷式的发展,从民用无人机到军用无人机高速的发展[1]。固定翼无人机作为其中的一个小分支,因其在获取地理信息数据、电力巡航、通信恢复、精准农业、物流运输、环境监测、遥感监测、救援搜救等领域的巨大优势而得到广泛应用。
在各种应用行业,固定翼无人机在航速、续航、载重、航程,自身构造等多个方面有着独特优势,能够在多旋翼无人机无法适应的环境下完成相关的任务。对于环境保护方面固定翼无人机可以搭载氢燃料电池,能量释放量大、电池质量轻,可以实现其长续航的需求。如Intelligent Energy 无人机配备轻型800 W 燃料电池动力模块,电池质量仅0.93 kg[2]。氢燃料电池是通过使用燃料的方式来给无人机提供能量来源,然而在基于太阳能续航的无人机领域,Zephyr S 在2018 年创造了25 天23 h 57 min的持续飞行记录,昼夜飞行高度21~16.7 km,刷新了太阳能无人机最长续航时间记录[3]。太阳能无人机对于飞行的高度有要求,在低空领域通过激光供能的方式为其提供额外能量来源,激光照射无人机激光感应区域进行光电转换,以此提高其滞空时间,面向一个集群的时候运用较好的激光供能调度算法是提高其工作效率的关键[4]。上述情况都是外部直接增加有限能源的方式,从自身来看改变其气动性布局减小空气阻力从而降低能耗,提高电池效应,增加续航。刘靖[5]针对无人机的排气问题,进行了全机气动性减阻优化设计,在最大速度状态下生阻比增加0.44,气动阻力有明显改善。
然而太阳能无人机造价成本较高,无人机存储氢燃料情况受阻,激光供能技术传输距离受限,相关技术不成熟,气动性布局仅仅改变本身的飞行特性降低飞行阻力。目前急需探索一种基于现有无人机实际情况且能充分利用环境中能量来实现无人机长续航降低能耗的新方法。
1 国内外研究现状
1.1 燃料电池无人机发展
1.1.1 国外燃料电池无人机发展
美国、英国、以色列、韩国、新加坡等国家关于燃料电池无人机的研究比较早。2003 年美国NASA 资助的“Hornet”燃料电池无人机,验证了氢燃料电池驱动飞行器的可能性,飞行时间达到15 min[6]。2004 年,由美国加利福尼亚大学设计的燃料电池驱动的无人机,用于植被场地的遥感研究并且试飞成功[7]。同年美国航空航天系统设计实验室和佐治亚理工大学共同开发开发燃料电池无人机的验证工具并对燃料电池无人机进行了演示[8]。2008 年AeroVironment 公司使用Protonex 燃料电池远远超过之前电动无人机,让“Puma”无人机达到了7 h 的长时间续航[9]。2009 年10 月美国海军实验室对“离子虎”无人机进行了进一步的优化,使得“离子虎”无人机最终飞行时间达到了23 h,并且在同年11 月飞行时间达到了26 h[10]。同年,以色列Israel Aerospace Industrie 公司改进之前的无人机变成了燃料电池版,无人机的飞行时长延长到了6 h[11]。2010年韩国宇宙航空研究院设计制造的混合动力燃料电池无人机“EAV-1”续航时间达到了4.5 h[12]。2014年以色列蓝鸟公司设计制造的“徘徊者B”燃料电池无人机续航时间达到了10 h[13]。2016 年,新加坡ST Aerospace 公司制造的Skyblade 360 燃料电池无人机续航时间达到了6 h[14]。2021 年Metcalf A 等人研究了一种用于无人机(UAV)的内燃机和固体氧化物燃料电池(SOFC)混合动力系统,使用直接液体60/40 甲醇/硝基甲烷燃料的管状SOFC 能够产生550 mW/cm2以上的最大功率是当前无人机续航记录时间200%[15]。国外燃料电池无人机续航发展如表1所示。

表1 国外燃料电池无人机续航发展
1.1.2 国外燃料电池无人机发展
国内关于燃料电池无人机的研究比较晚。2012 年燃料电池无人机“飞越一号”由同济大学航空航天与力学学院和上海奥科赛飞机有限公司联合研发,其续航时间超过2 h[16]。2014 年5 月武汉众宇动力有限公司研发了一款名为“天行者”的燃料无人机,并且续航时间达到了12 h[17]。2016 年科比特航空科技有限公司发布了旗下的燃料电池旋翼无人机“HYDrone1800”续航4 h[18]。同年宁夏优雷特公司与珠海晴航空航天科技公司合作完成的全球首架氢燃料电池倾转旋翼无人机试飞成功,在多旋翼状态下可以续航2 h,在固定翼情况下续航时间可以达到6 h[19]。2019 年12 月北京新研创新科技有限公司与中国航空合作研发的六旋翼燃料电池无人机,续航时间达到了5.5 h[20]。国内燃料电池无人机续航发展如表2所示。
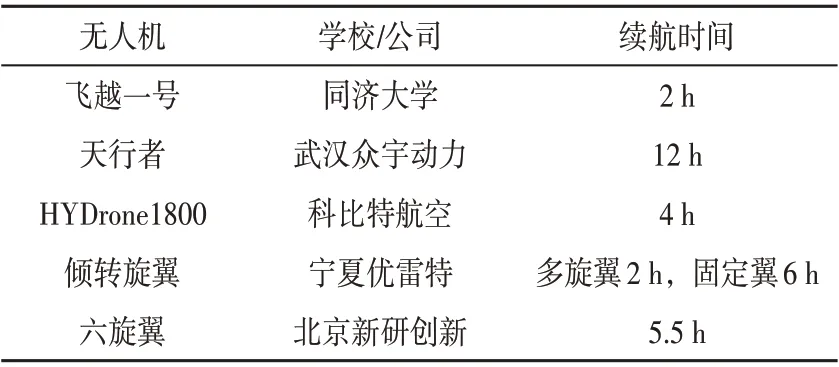
表2 国内燃料电池无人机续航发展
1.2 太阳能无人机发展
1.2.1 国外燃料电池无人机发展
在国外,1974 年11 月4 日太阳能无人机SunriseI在太阳能电池的驱动下试飞成功,总重12.5 kg,完成了3 h的续航时间,标志着太阳能无人机时代的到来[21]。1975年9 月12 日SunriseⅡ试飞成功,总重量为10.2 kg,该飞机在SunriseI 的基础上让无人机的电池效率提升了14%[22]。美国AC Propulsion 公司的创始人,资助了“SoLong”太阳能无人机项目,该无人机的重量为5.6 kg,翼展为4.75 m,加上太阳能电池总重量达到了12.6 kg。为了极大地增加无人机的续航时间,6 位飞手来远程控制该无人机,极大地避免空气中的下降气流,寻找上升气流,最终让该无人机在科罗拉多沙漠飞行了48 h[23]。洛桑联邦理工学院设计制造的超轻太阳能自主无人机“天空水手”,该无人机翼展3.2 m,总重2.4 kg。2005 年首次飞行成功,2008 年,续航时间高达27 h[24]。2013年,美国AeroVironment 公司对燃料电池“PumaAE”无人机改造成为太阳能无人机,续航时间达到了9 h,自身重量只有6.5 kg[25]。2015 年,瑞士苏黎世联邦理工大学制造的太阳能锂电池混合动力的无人机“AtlantikSo1ar”总的重量为6.9 kg,能够比较好地适应恶劣的气象条件,最终续航时间达到了81.5 h,航程为2 333 km[26]。2020年沙特阿拉伯阿卜杜拉国王科技大学纳泽克·埃尔·阿塔布等设计的波纹超柔性硅太阳能电池,根据“AtlantikSo1ar”无人机的飞行耐久性,对波纹电池和商用半柔性电池的性能进行了理论比较,前者比商用的半柔性电池重量更轻,飞行时间延长10%[27]。国外太阳能无人机续航发展如表3所示。

表3 国外太阳能无人机续航发展
1.2.2 国内太阳能无人机发展
我国太阳能无人机起步较晚。2003 年珠海新概念航空器研发中心对于“绿色先锋”太阳能无人机进行了试飞,续航时间达到了10 h[28]。2016 年由西北工业大学研制了“魅影”太阳能无人机,通过改变无人机的气动性布局提高其飞行的效率,续航时间达到了16 h,并于2019 年达到了27.5 h[29]。2017 年由中国航天科技集团第十一研究院自主研发的太阳能无人机“彩虹”完成了临近空间的飞行试验,高度可以达到20 km[30]。国内太阳能无人机续航发展如表4所示。
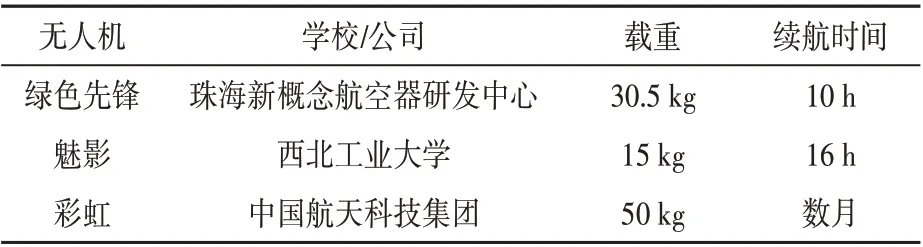
表4 国内太阳能无人机续航发展
1.3 国内外激光供能无人机的研究
2005 年美国NASA首次使用激光能量传输装置使得无人机在空中持 续 飞 行[31]。2006 年 日本近畿大学利用光纤传达能量的方式为带有光伏电池的无人机提供了持续飞行的能量[32]。2012 年一架小型的无人机Stalker 加装了激光传输能量装置,最终完成了激光飞行的实验[33]。2016 年约翰·法基迪斯实验结果表明,向距离达30 m 的太阳能电池提供7.2 W 光功率的可行性,几何损失率仅为2%[34]。激光供能无人机的示意图如图1所示。
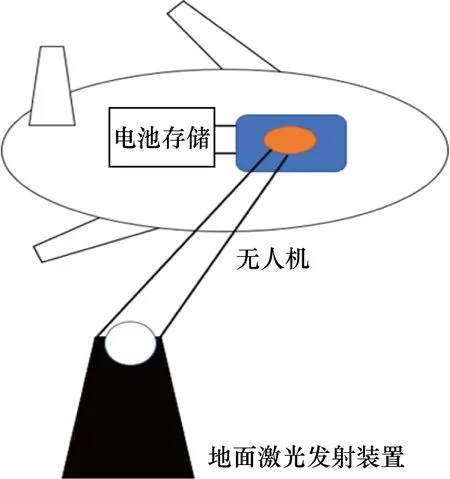
图1 无人机激光供能系统
国内在这个方面的研究还处在初步阶段,先后有北京理工大学、山东航天电子技术研究所、南京航空航天大学、解放军装备学院、国防科技大学等参与相关的研究工作。2013 年北京理工大学设计了激光能量传输的实验,实验得出最终的激光转换为电能的效率到达了48%,总的传输效率达到了18%,验证了空间中激光能量传输的可行性[35]。2014 年,山东航天电子技术研究院做了一个LWPT 子系统实验,两个器件之间的距离为11m,输出功率可以达到13.6 W。实验的两个移动的飞艇之间的距离是50~100 m,相对的运动速度为5 m/s,最终实验结果为最大接收功率为13.4 W,传输的效率为16%[36]。南京航空航天大学的杨雁南团队[37]在无人机上采用激光无线能量传输,在其传输过程中的每一步进行效率的计算分析,验证了原理样机的实验可行性;军械工程学院的刘晓光教授团队[38],针对激光无线传能无人机光伏电池接收器结构开展了大量研究,设计出了在不同均匀照度条件下的光伏电池接收机的结构布置以及光伏电池列阵排列方式,成功构建了光伏电池的动态热模型,并解析了光伏电池温度变化和激光功率、风速、温度之间的关系关联。
1.4 总体气动性布局增加无人机续航
1.4.1 国外运用外部气流增加续航
无人机优化气动性布局可以降低无人机能源的消耗从而增加续航时间。美国、英国、澳大利亚等国家研究在风场梯度、湍流获取和上升气流获取能量。美国NASA 研究中心的Michael J Allen 认为提高自主飞机耐力的一种相对未被探索的方法是使用低层大气中发现的浮力空气羽流,称为上升气流或者是热气流,运用一个固定宽度的螺旋路径来搜索上升气流,并且同时保持对表面目标的视线,无人机自主寻找上升气流,结果表明原本只能2 h 续航的无人机,最终在夏季最多可飞行14 h,冬季可飞8 h[39]。北卡罗来纳州立大学Daniel J Edwards and Larry M Silverberg 研究了一种新的方法来定位和允许滑翔机可以始终保持在对流上升气流中,滑翔机ALOFT是第一架进入到高空竞争的自主翱翔飞机,在集中使用上升气流的能力上优于手动飞行的飞机[40]。美国NASA兰利研究中心研究表明振荡气流对机翼产生推力的现象被称为“Katzmayr Effect”效应。气流产生的湍流现象而引起的推力也常常会影响到无人机的滑翔过程[41]。宾夕法尼亚州立大学介绍了一种估计小型无人机所在风场的风速、风速变换率和风场梯度的方法,为无人机使用无人机风场的风速等因素而提出了一种新方式利用小型无人机传感器套件估计动态三维风场的方法[42]。明尼苏达大学提出了利用风梯度实现的滑翔机动态飙升的最佳模式,研究了滑翔机在风梯度中的不同最优动态飙升模式,以及风梯度坡度和非线性剖面变化对这些模式的影响[43]。明尼苏达大学明尼阿波利斯分校研究了利用低空风梯度来降低无人机燃料消耗的最优动力动态飞行,确定了动力无人机的两种动态飙升模式,对于较小风速条件参数时,无人机沿着上升气流爬升到一定的高度从而失去空速,最后会沿着风下降从而获得空速[44]。宾夕法尼亚州立大学提出了一种基于图的方法来规划在一组路径上的节能轨迹的方法,引入了能量图标注出无人机从一点到目标点所需最小能量的路径从而增加无人机的续航[45]。利用环境中的气流情况提升续航如表5所示。
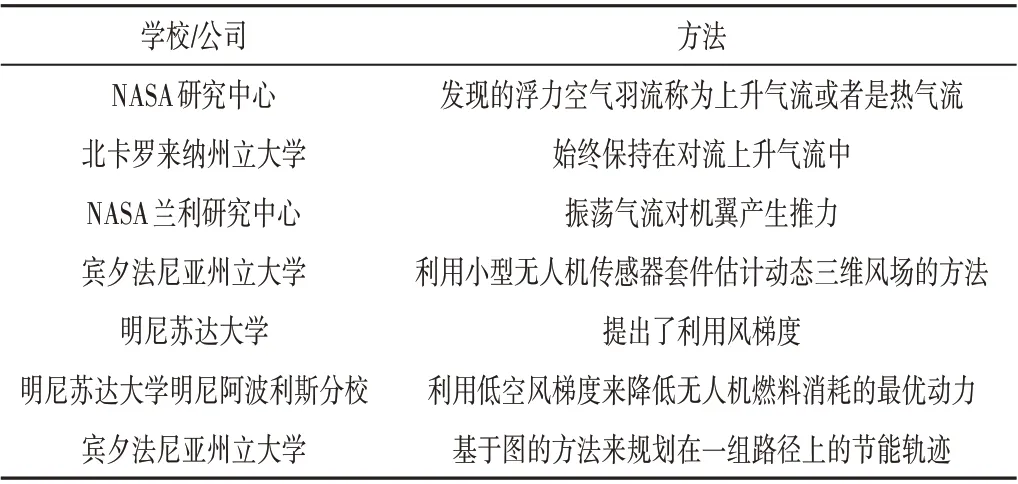
表5 利用环境中的气流情况提升续航
1.4.2 国内运用外部气流增加续航
国内对于上升气流的研究主要是在风场梯度、运用重力势能、上升气流来增加无人机续航的研究。国防科技大学王文龙[46]对风场进行建模,突出风速和风场梯度的空气动力效应,利用数值求解不同风场下飞行器的飞行情况,分析了风速影响飞行器风的梯度影响飞行器的姿态因素。单上求等[47]从理论上得出三维空间中机械能可以增加的最大范围,推导出最大的机械能增加率。从而使得无人机在飞行过程中可以获得更加有利于获取能量的方式得出最大的风梯度、更小的阻力系数和更小的画质比。刘多能等[48]根据飞行器动力学对梯度风场中的无人机运动方程加以推导和简化处理,并分析最终结果逆风爬升,而顺风下降则是无动力滑行飞机的最基本获能方法。高显忠[49]提出了结合飞行器在飞行过程中的飞行方法,重点引入了基于重力势能和风梯度能量获取的思路从而分析飞行器的性能影响的特征和规律。
2 无人机续航提升方式综合分析
2.1 国内外激光供能无人机的研究
燃料电池从最早的汽油类燃料,转变为现在环保的氢燃料电池。氢燃料燃烧能量释放大,最终生成水不会对环境产生影响,产生二氧化碳。因其在空中燃烧运行时需要氧气的,当无人机的上升高度很高时,故其在海拔较高的地方氧气较为稀薄,燃料电池的燃烧效率不高,能耗的转化率不高。氢燃料对其存放的环境比较苛刻,需要高压存储氢气缓慢释放氢气给燃料电池使用。氢燃料虽然较轻,存储起来所占的体积大,无人机的体积也会因此变大从而降低其灵活性。
2.2 基于太阳能获取能源的方式提高续航
固定翼无人机长续航方面的研究,是可以在机翼上用上太阳能电池板或者是太阳能新材料来给无人机提供额外的动力来源,太阳能板机翼受限制较大。能源来源是利用太阳光的辐射把光能转换为电能存储到电池,提供给无人机使用。通过白天有太阳光的时候,把电能存储起来,夜间或者是阳光不够充足的情况下提供能量。太阳能无人机具有很多优点,能源来源对于环境友好,不会对全球温室效应产生影响。太阳能无人机的优缺点如表6所示。

表6 太阳能无人机的优缺点
但是太阳能无人机也是存在一些问题如下:在长时间的阴雨天的情况下飞行,其续航会受到影响,另外太阳能板轻薄等关键技术制造难度大,造价高昂。太阳能板的轻型无人机开发和应用利用无人机各种感知传感器从而实现固定翼无人机能耗的降低,因为太阳能板的加入增加了自身的重量,很大地影响了无人机的载重和无人机的长续航飞行。太阳能无人机都有一个共同点,那就是体积比较大,太阳能无人机需要比较大面积的机翼来放置太阳能板。太阳能板现阶段受限于光电材料的影响,光电的转换效率较低。太阳能转换为电能需要高容量的电池组去存放获得的电能。无人机对于电源的能量有较大的要求,太阳能就需要增加太阳能板来满足这一点需求。这样就使得无人机本身的重量增加,自身重量的增加导致无人机的载重减少,续航能力下降。还有就是太阳能板表面容易受到环境的影响较大,容易受到腐蚀导致光电转化降低,容易在极端天气下出现问题,对于全天候的无人机来说这点就是致命的。当然如果太阳能无人机是飞行在高空的临近空间来说使用太阳能无人机是很好的一个选择,这样无人机受到空气阻力为最小的,受到云层的影响也是最小。但是对于小型固定翼无人机来说,通过使用太阳能板来为固定翼无人机提供能量从而增加续航的方式是不可取的。
2.3 利用外部供能的方式增加续航
激光供能的过程类似于飞机空中加油的方式为无人机提供能量从而增加续航,激光可以向无人机传输信息的同时也向无人机传输能量。激光供能无人机受制于光电装换材料的限制,激光向电能方向的转化率低。虽说在无人机增加续航方面有一定的进步意义,但是电能转化激光再转化电能的期间的能量损耗比较大,对于电力资源浪费比较大。激光供能在使用上的局限性比较大,当空气比较中的杂质较多的时候,激光的穿透性不强,导致最终传输到无人机上的能量减弱。如果无人机与激光发射器间有遮挡的时候,激光无法穿过或者绕过中间的遮挡物。
3 分析与讨论
太阳能无人机因其需要大面积太阳能面板,导致无人机的体积过于庞大,活动的范围受限,太阳能面板的价格较贵,光电转化效率不高。燃料电池无人机续航时间较长,因其在氧气稀薄的区域燃烧不充分,故其特殊领域任务会受到限制。激光供能的方式是通过额外的激光传输装置来获取无人机需要的能量,激光传输过程中能量损失较大,会受到障碍物的遮挡影响能量的传输效益。
固定翼无人机有了更加好的气动性布局,可以降低其飞行阻力,减少不必要的能量损耗。气动性布局是其内在减少能耗的因素,外在的降低能耗的方法则可以通过自动寻找飞行中的上升气流。缺点就是寻找上升气流的过程是一个无人机自消耗能量的过程,如果飞行过程中出现没有上升气流或者上升气流很小的情况,这样反而因其自身的传感器能耗大降低了续航时间。优点就是固定翼无人机可以借助上升气流达到一定的高度,通过无动力滑翔的方式前进,降低自身能量损耗提升续航时间。因其完全仿动物滑翔的过程[50],期间的动力装置关闭所产生的噪声低,适合监测违法犯罪活动。功耗降低、续航增加,固定翼无人机所监测的范围增大。
飞行过程中存在着各种气流环境,上升气流与下降气流又是影响无人机续航时间长短的重要因数,但是上升气流不是每时每刻都存在的,在上升气流不存在的情况下无人机的续航很难提升。现有寻找上升气流的方式是通过传感器的使用,然而传感器的使用也会降低无人机的续航能力,目前急需探索一种基于现有无人机实际情况且能充分利用环境中能量来实现无人机长续航降低能耗的新方法。未来可以在上升气流的识别算法上引入机器学习自动识别判断上升气流,优化飞行路径,从而控制其自身能源消耗,提升续航时间。无人机还可以使用新型的气流感知材料、轻薄材料减轻自身重量,降低不必要的能量消耗,也是增加续航有效方式。
4 结束语
本文主要聚焦在现有固定翼无人机提升续航时间的方式上,从太阳能供电、氢能源供电、激光供电3 种不同供能方式出发,对目前提升续航方式进行了简要的介绍。根据不同的供能方式,对固定翼无人机在不同供能方式下的优缺点进行了概括。利用对比分析的方法,总结了现有提高无人机续航的方法,并指出现有提高续航的策略集中在无人机自身电池方面寻求突破。同时,提出长续航问题应在现有电池技术的基础上结合外部能量的方法,应是未来需要追寻的热点和方向。
目前固定翼无人机提升续航的方法还存在着很多不足。(1)太阳能方式:制作成本高,太阳能板光电转化效率低,机翼需要的表面积大,不适合小型无人机,夜间没有光源等缺点。(2)氢能源供能方式:氢能的获取需要大量能源损耗,且现阶段氢能源存储、释放技术不成熟。(3)激光供能方式:其现阶段处于研究之中,暂时还没有应用场景,通过电能转换到激光最后再转化到电能过程中能量损耗大。(4)现阶段来看,固定翼无人机在寻找上升气流方面的方面,得依靠固定翼无人机飞手的长期经验来进行判断。
针对现有的无人机续航时间的长短,提出可在无人机自身的空气参数方面寻找突破,同时利用新型材料或者低能耗传感器来感知空气中有利于无人机飞行的上升气流,进而降低自身能耗,提升续航时间的方案。
