中海油YQ60可移动式平台起重机
2023-03-23符小荣盛朝晖
符小荣 盛朝晖 周 罡
武桥重工集团股份有限公司 武汉 430056
0 引言
随着我国风电市场和海上石油平台项目的不断发展,海洋平台上对于各型起重机的需求也日趋增大。本文所述YQ60可移动式平台起重机是一种新式的即用即拆型起重设备,如图1所示。该机主要为海洋平台质量为15~60 t的钻采设备提供吊装服务,以及完成平台海上维修改造作业时的吊装任务。在完成海上吊装作业任务后,该机还可卸运回陆地安装,供陆地施工使用。该机具有完善的功能系统,其设计与制造在选材、配套件选用、系统功能、性能要求等方面严格执行API 2C规范要求。整机采用模块化设计,各系统及部件均为活动连接,有效地控制了单个组块的质量,以确保仅利用平台原有起重机即可完成本机的安装拆卸工作,具有较好适用性。同时,考虑到部分平台原有起重机的负载限制,将该机设计为可移动式,使其能够自行由安装位置移动到吊装位置,进一步扩大了起重机的适用性。

图1 YQ60可移动式平台起重机
1 主要功能及性能参数
YQ60可移式平台起重机的主要特点体现在:1)起重能力大,可移动性强,安全实用;2)外形紧凑,占用空间小,重心低,不影响平台的稳定性;3)采用液压缸变幅系统,可提供更小的作业半径,同时降低备件成本;4)适应性强,适应各种平台、陆地不同的安装环境;5)拆卸安装简单方便,单个组块使用平台起重机即可完成吊装组装工作;6)操作简单、作业效率高,可满足各种吊装需要。
该起重机的形式为液压缸变幅,桁架式吊臂,由多模块组成,可沿导轨移动;采用电动机—液压驱动方式;整机行走采用液压驱动;吊臂安全工作角度为12°~77°;满载时的起升速度为0.1 m/s;最大工作半径为24.5 m;最小工作半径为5.4 m;起升高度为69 m;满载时回转速度为0~1 r/min;回转范围为360°;整机质量为95 t。
2 主要结构及特点
YQ60可移动式平台起重机的主要结构包括吊臂、变幅机构、起升机构、回转机构、起重机底座、整机走行机构、液压系统和电气控制系统等,如图2所示。通过模块化结构设计,控制单个组块质量在8 t以内,每个组块均设置有单独的起吊点,以确保整机造型美观、工艺性好、操作简单、便于拆装运输。计算经Ansys计算机有限元分析,结构件的强度、刚度、局部和整体稳定性均满足要求。

图2 YQ60可移动式平台起重布置总图
2.1 吊臂
吊臂的总长为25 m,采用箱形结构,施工工艺简便,稳定性好、承风能力强、质量轻,适于海上安装环境。为控制组块质量及方便运输,将吊臂分成2段,2段之间通过螺栓或销轴连接。吊臂头部安装有吊钩钢丝绳滑轮,吊臂根部通过销轴与起重机回转平台连接,吊臂的变幅通过伸缩液压缸实现,伸缩液压缸一端铰接在起重机支座上,另一端与吊臂铰接。箱形吊臂面板均采用Q355B级高强度钢板制作,吊臂完全焊封,并经密封性检验。
吊臂是起重机的重要受力构件,对其结构受力的验算尤为关键。作用在吊臂上的力分别为吊重(静态安全负载)、吊臂径向前倾载荷、吊臂自重、风载及液压缸顶升处与吊臂底端处的支反力,其结构受力分析如图3所示。图中:F1、F2为吊臂端部支座反力,F为液压缸顶升处支座反力,G为吊臂自重,Q为静态安全负载,q为风载均荷载力。

图3 吊臂结构受力分析图
根据计算模型,可以得出:
1)吊臂仰角为77°、吊重为60 t时,液压缸顶升处的顶升力最大,最大值为3 258.657 kN。
2)吊臂仰角为72°、吊重为42 t时,吊臂底端处支反力的合力最大,最大值为2 332.079 kN。
3)吊臂仰角为77°、吊重为60 t时,液压缸顶升处的弯矩最大,最大值为3 643.828 kN•m。
4)吊臂仰角为72°、吊重为42 t时,第1节臂与第2节臂连接处弯矩最大,最大值为3 538.307 kN•m。
2.2 变幅机构
变幅系统由2台变幅液压缸来完成动作,可利用起重机动力系统提供的液压动力源驱动,其控制系统置于操作台内。液压缸缸筒上集成了平衡阀,当下放吊臂时,平衡阀有效控制下降速度,防止吊臂降落过程中发生重力超速现象,保护吊臂起落安全;另一方面,即使出现液压管路爆管的情况,平衡阀仍能将吊臂安全地锁止在当前状态。变幅液压缸一端销接在起重机回转平台上,另一端销接在吊臂第1节。吊臂变幅的上下限位由液压缸的行程决定,变幅角度为12°~77°。
2.3 起升机构
起升机构利用起重机动力系统提供的液压动力源驱动,带有失效自动刹车保护,安全可靠。起升机构主要由卷扬机、左右侧板、滚动轴承、底座、轴、平衡阀、液压制动刹车等组成。卷扬机由多层缠绕钢丝绳的卷筒、内藏式行星减速器、液压马达、盘式制动器和限位开关组成,其中减速器内装有多片制动器。在低速端卷筒的法兰上装有紧急制动用的钳盘式制动器,一旦出现紧急状况,卷筒即可停止转动。在钢丝绳自由端连接绞车吊具,吊具由尾链和吊钩组成。卷扬机输入端液压马达上集成平衡阀,起吊载重时可在任意位置锁住,不会自行下落,即使起升机构液压管路出现爆管情况,平衡阀仍能将吊重安全地锁止在当前状态。
YQ60可移式平台起重机的起升机构设有应急下放功能,操作时可手动泵开启卷扬高速制动器和盘式制动器,然后操作液压系统控制阀组相关球阀,悬挂物重和自重使卷扬缓慢下放。
起升机构卷扬机布置在吊臂尾部,其控制系统置于操作台内。卷扬机钢丝绳倍率为6,单绳拉力为11 t,钢丝绳规格为VEROTOP 同向捻,非旋转钢丝绳,1 960级,直径为26 mm,最小破断拉力为63.02 t,钢丝绳的安全系数为5.73,在臂头定滑轮组的钢丝绳死头处设防转套和拉力传感器。
2.4 回转机构
回转机构主要包括2个行星齿轮减速器、2个定量油马达、回转支承、组合阀块等。行星齿轮减速器由恒定排量的液压马达驱动,小齿轮输出带动整机回转。起重机设计为360°全回转,回转支承外圈法兰通过螺栓联接于回转平台底部,回转支承内圈法兰通过螺栓联接于起重机底座上方。
回转平台用于安装吊臂、起升机构、变幅机构、回转机构、配重、液压马达和操作室等作业,如图4所示。为了保证起重机的正常操作,回转支座具有足够的刚度和强度,其强度执行API 2C的要求。
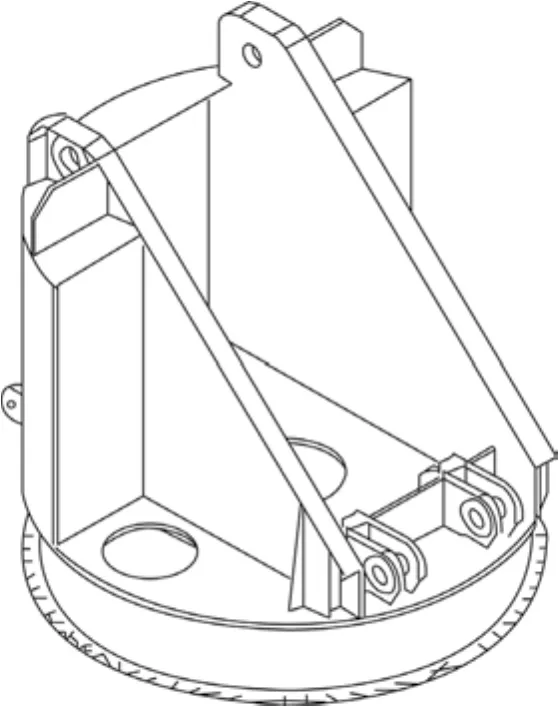
图4 回转平台结构三维示意图
2.5 起重机底座
起重机底座是起重机旋转部分质量及吊重的承载机构,同时还要承载机构制动载荷,如图5所示。起重机底座采用板梁结构,底座面板铺设格栅盖板,作为安装、检修人员通道。

图5 起重机底座结构三维示意图
起重机底座的安装形式可根据实际情况调整,当平台顶层甲板空间条件允许时,可设置起重机滑道,起重机底座安放于支撑梁上,利用锁紧装置固定。当顶层甲板空间有限、无法设置起重机支撑梁时,则直接将起重机底座用螺栓固定于顶层甲板上。
考虑到回转平台内液路管线可能出现泄漏情况,在起重机底座下部设置可拆卸式集油盘,用于收集溢油,以免溢油污染环境。
2.6 整机走行机构
YQ60可移动式平台起重机的行走机构由2个液压缸和2个步行器组成,整机移动通过2个液压缸驱动2个步行器完成,利用起重机动力中心提供的液压动力源驱动。液压缸一端与起重机底座销接,另一端与锁块销接,锁块固定在起重机支撑梁的上翼板上。起重机支撑梁采用钢板拼装而成,间隔3 150 mm布置2根起重机支撑梁横跨在平台甲板滑轨上。单根起重机支撑梁总长在7~14 m可调节,单根质量约8 t,采用分段式,分段根据甲板滑轨的跨距选择性安装在主段的两端或一端,主段与分段之间通过销轴连接。起重机支撑梁通过板钳固定在平台甲板滑轨上,板钳锁紧装置在螺栓固梁的上翼板设置若干螺栓孔,以满足起重机底座的安装。
起重机行走机构的系统控制台设置在动力撬座集装箱上,为壁挂式控制箱,控制箱内设有2个液压缸操作手柄,这2个操作手柄分别单独控制左右2个移动液压缸伸出或缩回。为确保2个移动液压缸同步动作,操作时需观察2个移动液压缸的动作情况,调整手柄开度缓慢补偿2个移动液压缸同步,在起重机的移动行走过程中不考虑加载。
2.7 液电系统
YQ60可移动式平台起重机的液压系统采用开式回路,构成简单。电动机驱动的液压油泵输出高压液压油,驱动吊臂变幅、主副钩起升和回转等运动装置的液压马达,实现吊臂变幅、主副钩起升和回转等动作。吊臂变幅、主副钩起升和回转等动作的正反向通过手操先导阀、液压控制多路阀的阀芯换向来实现,多路阀的释放阀用来向各种动作提供过载保护。应急停止装置设有系统应急停止装置和动力应急停止装置,系统应急停止装置装在主控制台上,可直接停止电动机,使起重机停止动作。
基于节能考虑,本起重机液压系统使用恒功率变量泵-定量马达形式,可随负载变化自动调节执行元件动作速度,实现轻重缓急的恒功率控制,避免节流功率损失,提高功率利用率。液压泵到各机构系统的油路为并联形式,管路损失小,同时使用阀控节流调节,以避免复合动作时负载的变化会影响流入各执行元件的油量。电动机防护等级为IP56,电动机与液压油泵均配备2套,一用一备,置于回转平台后面的动力箱内,可以起到配重的作用。
该机电控系统采用先进的人机界面PLC(触摸屏)+PLC(可编程控制器) + 软启动器控制方案。触摸屏与PLC系统通讯作为整机的综合监控系统,可通过其良好的人机交换性显示整机的运行情况,并对故障进行显示和分析。PLC为整机的逻辑控制中心,采集整机的各种信息进行逻辑处理,控制各机构运行。软启动器控制油泵电动机的平稳启动与停止,具有完善的保护功能。
该机最大用电功率为100 kW,包括油泵电动机90 kW、照明系统(含驾驶室空调等)7 kW、其他3 kW。该机电源由平台提供的三相四线(AC380V)船用电缆引入电气控制柜,在外部不能提供电源的情况下,由自带的120 kW发电动机提供电源。
1)动力电源 动力电源的总断路器(250 A)安装在电气控制柜中,供油泵电动机及整机所有电磁阀用电。总断路器设脱扣线圈,操作各位置的急停按钮可切断动力电源。
2)控制电源 由AC380V/AC220 V隔离变压器提供,控制电源经保护断路器输出到控制回路及PLC电源回路。
3)照明电源 由1台10 kVA三相隔离变压器(AC380V/AC220 V)提供本机照明电源,即整机投光灯、驾驶室照明、力矩限制器电源、风速仪电源及插座等。各照明回路均有空气开关保护,其中投光灯设2路25 A漏电开关保护。
4)功能系统 整机软启动器控制油泵电动机的工作。PLC采集油箱温度、压力、油位等传感器的信息,自动调节油温、油压到工作参数并对故障作出保护。
3 关键技术
1)根据海上石油平台起重设备需求特点,从总体设计思路和理念出发,应用有限元结构计算软件和模块化设计原理,建立既满足多功能需求又结构紧凑的可移动式起重机。
2)根据海洋石油平台起重机作业效率高的特点,在液压系统设计上,选择恒功率-负载敏感系统,建立1种液压系统流量的输出与负载无关的控制系统,在降低系统能耗的同时也有助于解决液压管路和液压油箱过热的问题。当变量泵为负载敏感泵且于待命状态时,主泵以小排量油源直接对泵自身起润滑作用,减少功率消耗。此外,辅助油泵中还有1个油泵通过吸油滤从液压油箱中吸油,对变量主油泵壳体进行冲洗,启冷却油泵作用,防止泵体过热。
4 结束语
中海油YQ60可移动式平台起重机是1种用于海洋平台的钻采设备吊装的针对性很强的施工装备,具有即用即拆、结构紧凑和模块化的特点,其设计与制造,在选材、配套件选用、系统功能、性能要求等方面严格执行API 2C规范要求,无论是对外购件的选择,还是对机械结构件的制造与加工工艺,都提出了更高的要求。该起重机一经投入使用,便以其灵活、紧凑和高效的性能特点备受用户好评,具有广阔的应用前景。
