基于动态学习策略多群体粒子群的消磁站水下磁传感器位置校正方法
2023-03-21王玉芬周国华吴轲娜李林锋
王玉芬, 周国华, 吴轲娜, 李林锋
(海军工程大学 电气工程学院, 湖北 武汉 430000)
0 引言
消磁是保证舰艇航行安全及战斗力的必要措施,准确测量舰艇磁场是实施消磁的重要前提[1-2]。目前一般通过消磁站海底敷设的磁传感器测量舰艇磁场。在消磁站水下磁传感器安装过程中,由于海洋复杂环境与水下安装工作困难等因素影响,实际工程中磁传感器安装位置与理想位置存在一定的偏差。考虑到水下磁传感器的现有安装工艺水平,位置偏差幅值约0.3 m,一定程度上给舰艇磁场测量带来了误差。为提高舰艇磁场测量精度,必须对消磁站水下磁传感器的位置进行校正。
目前最常见的方法是通过声波或光波等介质对传感器进行定位,但是消磁站半封闭式的环境和浑浊的水质给声波和光波定位的实施带来了困难[3]。相比而言,利用已知位置的磁源,通过磁传感器的磁场测量值来反推磁传感器的位置,给水下磁传感器定位提供了一种可行的技术思路[4-6]。文献[7]研究了根据三轴磁力计和已知磁偶极子的船只定位水下传感器网络。文献[8]研究了在某些磁传感器上加装辅助螺线管线圈对动态检测站的磁传感器进行定位。文献[9]研究了采用海面通电线圈作为磁偶极子磁源,使用深度传感器,将三维问题简化为二维问题,再求解位置矢量。文献[10]研究了利用磁偶极子完备性得到的位置矢量解析表达式对动态检测站临时布防的磁传感器进行快速定位。文献[11]研究了基于模值的标量定位方式解决背景地磁异常对磁传感器的影响。文献[12]介绍了基于振荡磁场的水下定位方法。这些方法为消磁站水下磁传感器定位提供了一定参考意义,但由于应用背景的条件差异,上述方法直接应用于消磁站水下磁传感器位置误差校正难以达到厘米级定位要求。
本文提出一种利用岸上已知位置的载流线圈作为磁源,以消磁站水下磁传感器理想安装位置为初始输入,通过磁传感器测量数据优化反演其位置矢量偏差,再确定水下磁传感器实际位置的定位方法,为消除位置偏差对舰艇磁场测量的影响奠定了基础。
1 磁传感器位置偏差对磁场测量精度的量化关系研究
为定量分析水下磁传感器位置偏差给舰艇磁场测量带来的影响,采用COMSOL有限元仿真软件建立潜艇垂向感应磁场Ziz数值仿真模型。按图1所示建立坐标系Oxyz,Pm表示磁传感器的实际位置,P(x,y,z)表示磁传感器的理想位置。设置垂向背景场为35 000 nT,龙骨下11个感应磁场计算点坐标取为:x取-25~25 m、间距5 m,y取0 m,z取15 m。为模拟不同幅值的位置偏差对磁传感器磁场测量的影响,选取一个磁场计算点随机耦合幅值为0.1~0.4 m的位置偏差,并开展100次数值仿真实验。
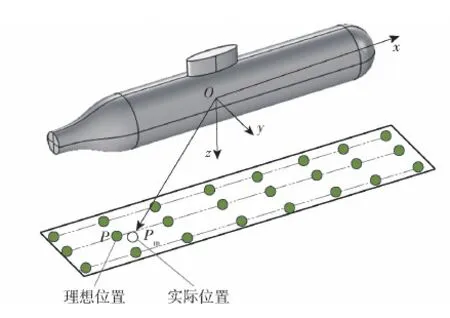
图1 潜艇物理模型几何示意图Fig.1 Geometric diagram of a submarine’s physical model
图2给出了龙骨下11个计算点位置误差水平为0.3 m时的感应磁场Ziz与理想情况下的对比图。表1给出了计算点P(-15 m,0 m,15 m)在不同位置偏差幅值下的磁场测量误差。
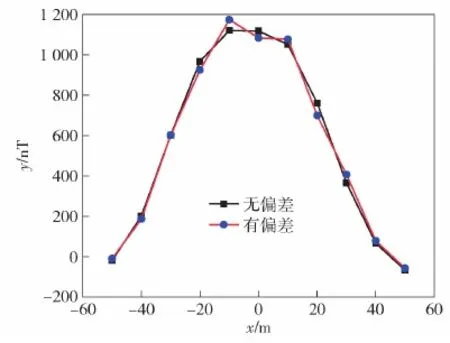
图2 龙骨下磁场对比Fig.2 Comparison of magnetic field under the keel
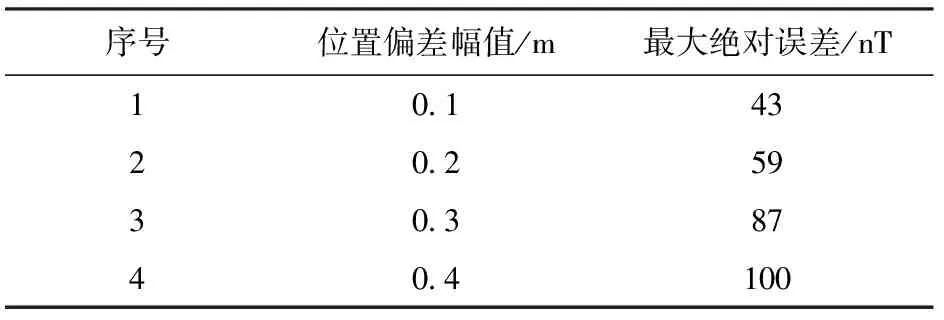
表1 磁传感器位置偏差仿真结果Table 1 Simulation results of sensor position deviation
表1的结果表明,随着位置偏差的增大,磁场测量误差越来越大;实际工程中磁传感器0.3 m的安装偏差可带来上百纳特的误差,直接降低了舰艇磁场测量精度,进而影响了舰艇磁性防护能力评估;当磁传感器位置偏差为0.1 m时,舰艇磁场测量误差可控制在50 nT以内,满足舰艇磁场测量要求。
2 磁传感器位置校正模型
2.1 位置校正模型
如图3所示,ri(xi,yi,zi)(i=1,2,…,s,s为测量位置的个数)表示理想位置P(x,y,z)相对于磁源的位置矢径,rm表示实际位置Pm相对于磁源的位置矢径,Δr(Δx,Δy,Δz)表示磁传感器的位置偏差,磁源从C1不连续移动到Cs。由于消磁站多采用单轴(z轴)磁传感器采集舰艇磁场数据,并考虑到借助万向平衡机构,磁传感器可准确获取磁场垂向分量Bz,采用Bz开展磁传感器的位置校正工作。
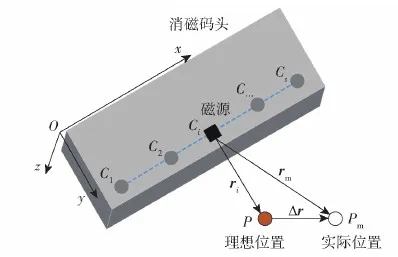
图3 位置校正原理示意图Fig.3 Schematic diagram of position correction
磁传感器位置校正的基本原理为:磁源沿预设轨迹不连续移动,同时磁传感器测量并记录磁场垂向分量Bz,根据磁传感器的测量值与理想位置P的磁场计算值之间的差异,计算得出偏差矢量Δr(Δx,Δy,Δz),从而实现磁传感器的位置校正。

(1)
式中:m表示磁源的磁矩;f(·)表示磁源的空间磁场分布函数。通过磁场测量值和计算值建立位置校正目标函数如式(2)所示:
(2)
通过合理设计磁源和优化求解目标函数式(2),即可获得磁传感器的偏差矢量Δr,从而实现磁传感器的位置校正。
2.2 磁偶极子磁源模型
结合消磁站应用实际,采用载流线圈作为磁源。以线圈中心为坐标中心,按照图4所示建立坐标系(图4中,Nw表示线圈匝数,I表示电流,R表示线圈半径,α表示电流元位置矢量的夹角,dl表示电流元长度),则空间中任意一点P(x,y,z)的磁场垂向分量解析计算公式如下:
(3)
式中:μ0表示真空磁导率。
图4 载流线圈磁场计算示意图Fig.4 Diagram of magnetic field calculation of current-carrying coil
在迭代优化过程中,每次迭代计算式(3)积分非常耗时,为简化计算,当测量点与线圈中心之间的距离远大于线圈半径R时,可将载流线圈等效为磁偶极子,由磁偶极子的标准公式[14]分解,得
(4)
式中:m表示磁偶极矩的大小,方向垂直向下,m=|NwIA|,A为载流线圈的面积。
2.3 优化求解
式(2)是一种多峰函数,普通的粒子群优化算法[15]在求解此类问题时易陷入局部最优,因此不适用于目标函数的求解。
为更好地确定位置偏差矢量,采取动态学习策略多群体粒子群优化算法[16]优化求解目标函数。相对于普通的优化算法,动态学习策略多群体粒子群优化算法有两个方面的改进:一是在粒子群优化算法中引入多个种群同时寻优以避免早熟收敛,并在一定程度上保持种群的多样性;二是为提高全局探索性能及计算速度,将动态学习策略引入多群体粒子群优化算法中。
初始化阶段与普通粒子群相同[17]:初始粒子的位置xi及其速度vi在可行解空间以及速度空间中随机产生,赋予每个粒子适应度函数fitness,并设立当前位置为个体最优pbest。
原始种群中粒子被分成M个子群。每个子群的最佳粒子被记录为lbest,并根据式(5)指导该lbest所在子群的其他粒子运动。
(5)
(6)
式中:w表示惯性权重;c1和c2表示加速度;r1和r2表示[0,1]范围中的随机变化数;d表示当前迭代次数。
每次迭代时,每个粒子都有两种并行类型的学习方法:式(5)和式(7),一个粒子的学习每次迭代只会执行一种方法。每个子群中的粒子分为普通粒子和通信粒子,普通粒子的概率为1-p,通过式(5)在其子群中寻找更好的位置;通信粒子的概率为p,通过式(7)在新的搜索区域进行学习:
(7)
p=d/itermax
(8)
式中:lbestq表示第q个子群中达到的最佳位置,其平均值被命名为联合最优,对全局最优gbest进行迭代更新;itermax表示最大迭代次数;参数p(p∈[0,1])的设置服从于函数式(8),随着d的增加而增大,从而增加子群中通信粒子的数量。图5清楚地解释了动态学习策略多群体粒子群优化算法的动态学习机制。
图5 动态学习机制方案Fig.5 Dynamic learning mechanism scheme
基于动态学习策略多群体粒子群的位置校正步骤具体如下:
步骤1初始化参数:理想安装位置P,磁场测量值Bzh,磁源的测量移动轨迹Ci,惯性权重w,加速度c1、c2,速度域等。
步骤2根据位置x初始化种群,并将种群分为M个子群,同时初始化位置个体最优,子群最优和联合最优。
步骤3随机产生普通粒子和通信粒子,普通粒子执行式(4)更新速度,通信粒子执行式(6)更新速度。
步骤4将每一个粒子适应度与历史最优进行对比,若目前适应度更优,则目前适应度更新。
步骤5将普通粒子的适应度与所在子群内的历史最优位置进行对比,若子群的最佳适应度更优,则更新。通信粒子的适应度与联合最优比较,若目前通信粒子的最佳适应度更优,则更新联合最优。
步骤6依据式(5)更新所有粒子的位置。
步骤7如果达到结束条件,则返回目前最优位置,结束计算;否则返回步骤3。
步骤8输出:磁传感器的偏差矢量Δr(Δx,Δy,Δz)。
3 数值模拟实验
为检验位置校正方法的有效性,按图6所示建立坐标系,磁源位于消磁码头平面,磁传感器位于15 m深的海底平面,距离码头10 m。考虑实际消磁站水下磁传感器位置校正的影响因素,从磁偶极子等效误差、磁传感器测量精度和环境噪声等方面开展数值模拟实验,定量分析对位置校正的影响程度,并结合典型消磁站模型参数开展位置校正模拟实验。
图6 仿真模型示意图Fig.6 Schematic diagram of simulation model
3.1 磁偶极子等效误差
为简化计算,将载流线圈等效成磁偶极子,结合消磁站的构造,在水下15 m深度开展磁偶极子等效误差的数值模拟实验。磁偶极子等效误差的计算如式(9)所示:
(9)

实验结果如图7所示,磁偶极子等效误差随着距离的增加而降低,位于海底平面的磁传感器与载流线圈的水平距离大于4 m时,磁偶极子等效误差小于2 nT,相对误差小于0.53%。与磁传感器磁场测量值(约400 nT)相比,磁偶极子等效误差对位置校正的影响可忽略不计。因此,可将载流线圈等效成磁偶极子,以提高计算效率。
图7 磁偶极子等效误差分析Fig.7 Equivalent error analysis of magnetic dipole
3.2 磁传感器测量精度
为综合评定磁传感器测量精度对磁传感器位置校正的影响,选取位置偏差(0.3 m,0.3 m,0.3 m),结合消磁站磁传感器测量精度的实际情况,在不考虑其他干扰条件的情况下,引入4种测量精度:0.1 nT、1 nT、5 nT、10 nT,并开展100次数值仿真实验。
实验结果如图8所示,磁传感器位置校正的误差随着测量精度的降低不断增大,当测量精度为0.1 nT时,位置误差可忽略不计;当测量精度为 10 nT 时,位置校正后z轴方向的平均误差超过0.04 m。 其中,目前应用最为广泛的磁传感器测量精度为1 nT,位置校正后,磁传感器x轴、y轴和z轴3个方向的平均位置误差均小于0.01 m。

图8 磁传感器测量精度误差分析Fig.8 Analysis of sensor measurement accuracy error
3.3 环境噪声
为分析环境噪声对位置校正的影响程度,磁传感器测量精度为1 nT,位置偏差取(0.3 m,0.3 m,0.3 m),引入5个等级的环境噪声:0 nT、10 nT、20 nT、30 nT、40 nT,并开展100次数值仿真实验,结果如图9所示:磁传感器位置校正的误差随着环境噪声的增大而增大;结合消磁站实际,当环境噪声处于10 nT级别时,磁传感器位置校正后,x轴、y轴和z轴3个方向的平均位置误差均小于0.1 m。
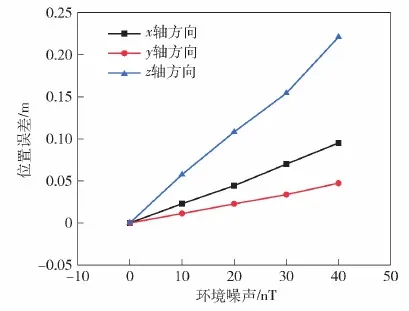
图9 环境噪声误差分析Fig.9 Analysis of ambient noise error in sensor measurement
3.4 位置校正数值模拟实验
结合消磁站实际情况,设计数值模拟实验。磁传感器精度取为1 nT,环境噪声等级取为10 nT,磁源的磁矩大小为31 416 A·m2,方向垂直向下。磁源移动11次,具体坐标如下:x取10~30 m、间距2 m,y取10 m,z取0 m,待校正磁传感器的理想位置坐标为P(0 m,20 m,15 m)。由于消磁站水下磁传感器安装的位置误差可控制在0.3 m范围内,设置 8种关于0.3 m的位置偏差状态,并开展位置校正仿真实验。
实验结果如表2所示:位置校正后,x轴方向的最大误差为0.022 m,y轴方向的最大误差为0.029 m,z轴方向的最大误差为0.058 m;磁传感器x轴、y轴和z轴3个方向的位置误差均小于 0.1 m,校正后的位置误差降低了一个数量级。

表2 磁传感器位置校正仿真结果Table 2 Simulation results of sensor position correction
4 物理缩比模型实验
为进一步验证磁传感器位置校正方法的准确性,设计1∶8.3物理缩比模型实验。物理模型实验如图10所示,磁源磁矩为(-5.5 A·m2,-13.2 A·m2,105.7 A·m2),磁传感器测量精度为1 nT;由于实验条件的限制,为尽量降低测量的复杂性,将磁源移动次数设置为3次,具体坐标如下:x取0~0.5 m、间距0.25 m,y取0 m,z取0 m,待校正磁传感器的理想位置坐标为P(0 m,1.2 m,1.8 m)。
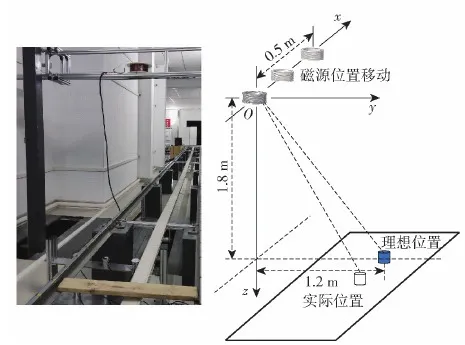
图10 模型实验布置图Fig.10 Layout of model experiment
考虑到磁传感器尺寸和物理模型比例尺度,选择位置偏差为0.1 m,设置偏差水平为0.1 m的5种位置偏差状态,实验结果如图11所示。图11中,1、2、3、4、5表示5种位置偏差状态下磁传感器的位置。表3为模型实验结果。由表3可知,x轴方向的最大误差为0.78 cm,y轴方向的最大误差为 0.81 cm,z轴方向的最大误差为1.16 cm。
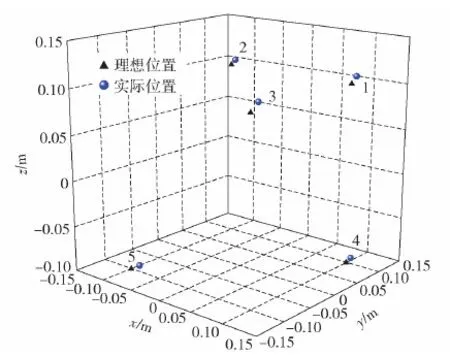
图11 实验结果Fig.11 Experimental results

表3 模型实验结果Table 3 Model’s experimental results
根据物理模型比例尺度,实际消磁站水下磁传感器位置校正后,x轴方向的最大误差为0.065 m,y轴方向的最大误差0.067 5 m,z轴方向的最大误差为0.097 m。校正后磁传感器x轴、y轴和z轴 3个方向的位置误差均小于0.1 m,满足舰艇磁场测量要求,并验证了位置校正方法的有效性。
5 结论
本文通过线性多重计量方法改变磁源与磁传感器的相对位置,建立水下磁传感器位置校正模型,并采用动态学习策略多群体粒子群优化算法求得位置偏差矢量,从而实现了消磁站水下磁传感器位置的高精度校正。通过数值模拟实验和物理模型缩比实验对位置校正方法的有效性进行验证。得出以下主要结论:
1)对舰艇磁场测量精度随水下磁传感器位置误差的影响关系进行了量化研究,结果表明磁传感器在实际安装误差不大于0.3 m时,舰艇磁场测量的误差可达上百纳特,为实现舰艇磁场的高精度测量,必须对磁传感器的位置进行校正。
2)提出了一种基于动态学习策略多群体粒子群优化算法的消磁站水下磁传感器位置校正方法,对磁偶极子等效误差、磁传感器测量精度和环境噪声等影响位置校正精度的因素进行了定量分析,其中环境噪声带来的影响最大。
3)设计了典型消磁站的物理缩比模型实验,验证了本文方法的有效性和准确性。新方法可对位置偏差不大于0.3 m的消磁站水下磁传感器完成校正工作,校正后x轴、y轴和z轴3个方向的位置误差均小于0.1 m,可满足铁磁性舰艇消磁站磁场测量误差50 nT的一般要求。
