基于弹道弯曲角速度单矢量的制导炮弹滚转角空中粗对准方法
2023-03-21杨启帆王江范世鹏白婵周永佳胡少勇
杨启帆, 王江, 范世鹏, 白婵, 周永佳, 胡少勇
(1.北京理工大学 宇航学院, 北京 100081; 2.北京理工大学 中国- 阿联酋智能无人系统“一带一路”联合实验室, 北京 100081;3.西北工业集团有限公司, 陕西 西安 710043)
0 引言
精确制导炮弹在发射后通常会采取低速滚转的飞行方案[1],具有控制系统简单、可有效对抗激光反导、改善质量偏心和轴系不对称等优势,得以广泛应用[2]。为顺应制导炮弹低成本、远程化的发展趋势,必须建立低成本导航系统。然而,制导炮弹内弹道呈现超高转速、超大过载的特点,惯性导航系统无法进行初始对准。因此,必须在发射后的无控段对滚转角进行快速空中粗对准,以便在滑翔段实施机动指令分解和组合导航精对准。
对于制导炮弹,无控段攻角与侧滑角在很短时间内即可收敛于0°,可以通过卫星获取的速度信息解算俯仰角和偏航角。然而,滚转角很难获得基准,如何实现滚转角的空中对准,是当前制导炮弹的难点问题[3]。空中对准利用卫星、惯性制导(以下简称惯导)等组合系统的卡尔曼滤波技术得到更精确的弹体姿态,但必须进行辅助机动飞行。若在滚转角快速时变且完全未知的条件下,制导炮弹控制系统无法完成空间指令分解,则辅助机动可能是空间中的任意方向,这是制导炮弹难以接受的。
利用地磁传感器可以测量地磁场信息来获取弹体姿态角[4-6],抗过载能力强、误差不随时间累积,但受限于磁场测量精度并且要增加额外的硬件设备。为避免陀螺仪超量程及附加误差大的问题[7],无陀螺惯性系统用于在空中测量滚转角,成本低、功耗小,但受限于加速度计的精度并存在计算量大的问题。近些年,卫星与惯导组合系统应用较广泛,MEMS-GPS[8]组合系统的姿态对准方法应用于空中粗对准滚转角,根据弹体转动运动学方程解算滚转角,但未考虑制导炮弹的姿态运动在实际飞行中特有的频域特性,对惯性元件的误差分析不足,仅针对较高精度、标定精确的惯导系统。佘浩平等[9]提出一种GPS-INS制导弹药的空中粗对准滚转角方法,但该方法利用GPS测量的速度信息求解弹道角,输出频率低、误差较大,同样未考虑弹体姿态运动的频域特性带来的误差。Wu等[10-11]提出一种基于速度- 位置方程的积分算法,利用惯导、卫星组合系统对飞机进行空中姿态对准,但并未在制导炮弹领域应用。彭博等[12]提出一种基于速度匹配与机动辅助的滚转角精对准方法,但需要提供机动控制参数,不适合在中制导前的无控段使用。
在惯导小型化、低成本的发展趋势下,MEMS器件逐渐被广泛应用于制导武器。然而,MEMS惯导由于惯性器件漂移大、安装误差标定困难,导致陀螺仪、加速度计的输出误差很大[13]。王思远等[14]提出一种双轴连续旋转调制方法,补偿了MEMS惯性器件的零偏、标度因子等误差,但安装构型复杂,不适合在滚转体制的载体上应用。

针对上述问题,本文提出一种基于矢量定姿原理,利用单矢量即角速率陀螺敏感的弹体角速度,以近似弹道弯曲角速度矢量,在无控段实现滚转角的粗对准。对比其他滚转角空中对准算法,该方法巧妙地利用了制导炮弹低速滚转特性,根据制导炮弹姿态运动的频域特性处理中低精度的惯性元件误差,不需要机动辅助,无需卫星信息,并减少地磁传感器等元件的安装,可在满足粗对准精度要求的条件下降低成本、提高可靠性。
1 问题描述
制导炮弹在发射后,通过斜置尾翼或发动机喷管斜置,使弹体以一定角速率绕着纵轴旋转。助推段结束后进行无控飞行,在弹体俯仰角满足一定条件后,舵机启控,进入惯导滑翔阶段,最终进入末制导阶段打击目标。图1为制导炮弹飞行全程弹道,炮弹飞行以北天东导航坐标系为参考。由于制导炮弹控制方式为单通道控制,需要获取精确的滚转角进行控制指令分解,另一方面,惯导的运行也需要精确的姿态初值,因此有必要在无控段进行滚转角的对准。
本文所用的坐标系有导航坐标系OXnYnZn、弹体坐标系OXbYbZb、准弹体坐标系OXYZ、准速度坐标系OXvYvZv。选用北天东(NUE)作为导航坐标系,弹体坐标系定义为前、上、右方向。令θ表示弹道倾角,ψv表示弹道偏角,ϑ、ψ、γ表示弹体坐标系与导航坐标系之间的转动姿态角,分别表示俯仰角、偏航角、滚转角。
建立导航坐标系与弹体坐标系的关系如图2所示,平面OAB及OAC表示水平面和铅垂面。准弹体坐标系与准速度坐标系的关系如图3所示。图3中,OABC平面代表飞行速度所在的铅垂面,Xv轴表示炮弹速度矢量的方向,OCDE表示弹体纵轴所在的铅垂面,称之为射面。Yv、Y轴均在OCDE平面内,并分别与Xv、X轴垂直,准弹体坐标系可理解为不随弹体滚转的弹体坐标系。准速度坐标系的Yv轴与速度矢量所在铅垂面OABC的夹角称为速度倾斜角γv(见图3),表征速度矢量偏离弹体纵轴的程度。

图2 导航坐标系与弹体坐标系的关系Fig.2 Relationship between navigation coordinate system and projectile coordinate system
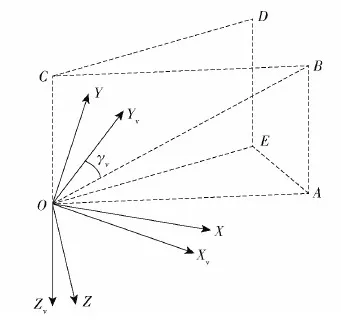
图3 准弹体坐标系与准速度坐标系的关系Fig.3 Relationship between quasi-projectile coordinate system and quasi-velocity coordinate system
弹体绕质心转动的运动学方程[16]为
(1)
由式(1)的前两式解得
(2)
由于无控段偏航角速率近似为0°/s,则简化式(2)为
(3)
(4)

2 滚转角粗对准方法
2.1 无控段角速率陀螺信息频域分析
由式(3)可知,理论上,制导炮弹在无控段飞行过程中,安装在弹体坐标系y轴、z轴上的陀螺测量值是幅值为俯仰角速率的周期信号。但在制导炮弹实际飞行过程中,陀螺仪误差不仅具有零偏及随机噪声,而且存在更多复杂的误差项。制导炮弹的姿态运动具有特定的频域特性,反映在陀螺仪测量数据中。一般地,陀螺仪数据有如下3种较明显的频域分量。
1)由于陀螺仪安装轴偏角,y轴、z轴陀螺仪会引入滚转角速率的信息,即使进行标定,在小误差角条件下仍然会有较大的滚转角速率分量。由于滚转角速率变化较慢,该信息为低频分量;陀螺仪存在零偏误差,该误差为低频分量。
2)弹体滚转引起的周期性信号,该分量反映无控段俯仰角速度的信息,是在无干扰、陀螺仪无误差条件下的理论值。
3)根据导弹飞行力学原理,弹体在飞行过程中受到偶然干扰而产生附加攻角,在稳定力矩作用下弹体以一定频率振荡,称之为特征频率,与弹体滚转频率相关[17-18]。理论上弹体俯仰角与弹道倾角相等,但弹体在干扰下受到纵向扰动,若弹体是动态稳定的,则会存在振幅为Δϑ、振荡特征频率为ωc的摆动。假设振幅在短时间内不变,弹体的俯仰角及俯仰角速度可表示为
(5)
则陀螺仪测量值变为
(6)
根据积化和差公式,可变形为
(7)
由式(7)可知,存在纵向扰动的情况下,角速率陀螺的测量值除滚转频率分量外,还包含如下频域分量:
(8)
2.2 基于单矢量定姿的滚转角粗对准
根据导弹飞行动力学公式,弹道倾角微分方程可表示为
(9)

在无控段弹道,制导炮弹的攻角及侧滑角快速收敛为0°,即准弹体坐标系的纵轴X与准速度坐标系的纵轴Xv重合,速度倾斜角γv近似为0°。
ϑ≈θ,ψ≈ψv,γv≈0°
(10)
无控段弹道倾角微分方程可简化为
(11)
无控段弹体在重力作用下产生弹道倾角速度,本文称为弹道弯曲角速度,其在惯性空间内可近似视为恒定方向的矢量。在弹体滚转过程中,俯仰角速度被滚转角信息调制,角速率陀螺可以测得俯仰角速度在弹体坐标系下的分量,由于攻角几乎为0°,可以将弹体俯仰角速度近似为弹道弯曲角速度。
图4为准弹体坐标系与弹体坐标系之间的关系,二者之间由滚转角联系起来。
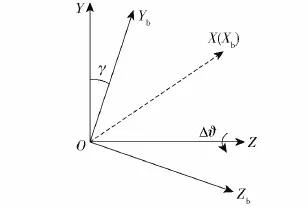
图4 准弹体坐标系与弹体坐标系的关系Fig.4 The relation between quasi-projectile coordinate system and projectile coordinate system
根据制导炮弹的绕质心转动的运动学方程可得到弹体姿态角速度的表达形式
(12)
式中:ωX、ωY、ωZ表示弹体姿态的角速度在准弹体坐标系的投影。制导炮弹的俯仰角速度矢量始终在准弹体坐标系的z轴上,即始终垂直与射面,则一段时间弹体俯仰角的变化Δϑ也在该轴上,该矢量大小为负。本文方法将一段时间的俯仰角变化量投影至在起始时刻冻结的弹体坐标系下,从而实现滚转角的对准。图5为初始滚转角对准方法示意图。
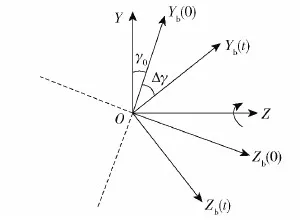
图5 初始滚转角对准算法示意图Fig.5 Schematic diagram of initial roll angle alignment algorithm

(13)
式中:
(14)
(15)
两边积分可得
(16)
展开得
(17)
(18)
(19)
(20)
则滚转角速率可通过滚转轴的陀螺仪测量值近似,Δγ为当前时刻的弹体坐标系b(t)相对于初始弹体坐标系b(0)已滚过的滚转角,可通过滚转角速率测量值积分获得。Δϑy表示一段时间俯仰角变化量在初始弹体坐标系y轴的投影,Δϑz表示一段时间俯仰角变化量在初始弹体坐标系z轴的投影。
在线对准滚转角需要对离散陀螺仪数据数值积分。设定积分时间为t,N为采样点,T为积分周期,
t=N×T
(21)
设定k代表第k个积分区间,
(22)
积分区间内已滚过的滚转角可视为常值,计算方式如式(23):
(23)


(24)
同理可得

(25)
定义滚转角取值范围γ∈[-180°,180°],求得俯仰角变化量之后,通过Δϑy、Δϑz的符号进行滚转角象限判断,判断依据如表1所示。
表1 象限判断规则Table 1 Quadrant judgment rule
3 仿真与飞行试验验证
3.1 制导炮弹无控段滚转角对准数学仿真
3.1.1 仿真条件
对制导炮弹进行无控段飞行仿真,设定初始飞行速度230 m/s,弹道倾角10°,滚转角速率1 900°/s,初始滚转角0°,陀螺仪输出频率100 Hz。理论上安装在y轴、z轴的陀螺仪测量值是以俯仰角速率为幅值的周期信号。为模拟实际飞行条件,对输出的陀螺仪数据添加误差,由于MEMS陀螺在无控段启动,在启动初期零偏及量化噪声尤其是低频闪烁噪声为主要误差源[19]。在陀螺仪测量值经过带通滤波器处理后,理论上仅存弹体转速频段的随机噪声,故简化陀螺仪误差模型如下。假设在该段时间弹体受到幅值为1°、频率为2.5 Hz的纵向扰动;由于安装误差标定不完全,x轴陀螺仪信息在y轴、z轴上分别有0.5°、-0.25°的轴偏角投影;陀螺仪三轴存在标准差为0.25°/s的随机白噪声误差及0.25°/s的零偏误差。仿真构造的双轴陀螺仪数据如图6所示。

图6 仿真陀螺仪测量值Fig.6 Simulation of gyroscope measurement
仿真得到的陀螺仪测量值具有多种误差,首先对陀螺仪数据进行频谱变换,角速率信号的频域特性如图7所示。由图7可知,弹体姿态运动存在3种频域分量,与理论分析相符。若要应用滚转角对准方法,则需要利用FIR数字带通滤波器提取陀螺仪测量值中与滚转频率有关的分量。

图7 陀螺仪测量值频谱图Fig.7 Spectrum diagram of gyroscope measurement
3.1.2 滚转角对准方法仿真验证
选取3~7 s的陀螺仪数据,并提取与弹体滚转频率相关的分量,结果如图8所示。
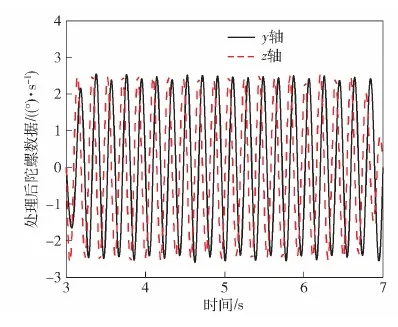
图8 频域处理后的陀螺仪测量值Fig.8 Gyroscope measurement processed in frequency domain
根据数字滤波器的窗函数截取特性[20],滤波后的一段数据在端点处会出现幅值衰减至0的现象。因此,在方法实际应用时需要将端点附近的数据舍去。
由式(3)可得
(26)
通过频域处理后的陀螺仪数据可计算弹道弯曲角速度大小,为验证对弹道弯曲角速度重构的有效性,将弹道弯曲角速度处理结果与理论值进行对比,结果如图9所示。通过对陀螺仪原始数据进行频域处理,可以对弹道弯曲角速度进行重构,并保持良好的精度,便于应用于滚转角对准。
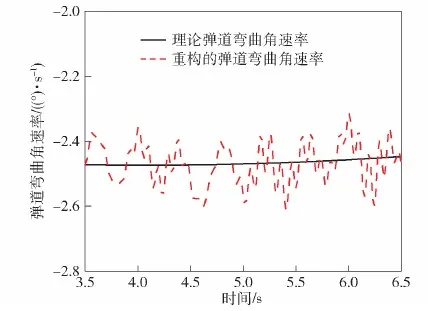
图9 弹道弯曲角速度重构效果Fig.9 Reconstruction effect of trajectory bending angular velocity
得到经过频域处理的陀螺仪数据后,由式(4)可知,根据运动学公式,可利用某一时刻的y轴、z轴陀螺仪数据直接计算当前时刻滚转角。而制导炮弹在实际飞行过程中,陀螺仪测量值存在着分布在各频段的随机噪声,该误差难以通过频域处理全部分离。理论上采用积分策略会对随机噪声有平滑作用。仿真条件不变,对比两种滚转角对准方法的精度,计算4~5 s的滚转角并与理论值对比,结果如图10所示。

图10 两种对准方法的误差对比Fig.10 Error comparison of the two alignment methods
对比利用运动学公式直接计算滚转角的方法,本文提出的积分策略对准滚转角对随机噪声有平滑作用,在陀螺仪存在多项误差的情况下精度及可靠性较高,无明显振荡,对准精度保持在0.5°以内。

其他条件不变,假设陀螺仪测量值不存在白噪声,选取滚转通道陀螺零偏为0.25°/s、0.5°/s、0.75°/s 3种情况进行仿真分析,不同零偏条件下滚转角对准误差曲线如图11所示。

图11 陀螺仪零偏对滚转角对准精度的影响Fig.11 Effect of gyroscope bias on roll Angle alignment accuracy
其他条件不变,假设陀螺仪测量值不存在零偏,设定陀螺仪分别存在标准差为0.25°/s、0.5°/s、0.75°/s的白噪声的3种情况进行仿真分析,不同强度白噪声条件下滚转角对准误差曲线如图12所示。

图12 陀螺仪白噪声对对准精度的影响Fig.12 Effect of white noise of gyroscope on alignment accuracy
从图11和图12中可以看出,滚转通道陀螺仪零偏会在一定程度上影响对准精度,但不会随零偏的增大而发散,依然可以将精度控制在1°以内;陀螺仪测量值的白噪声强度会影响对准的稳定性,在白噪声较大的条件下,不同时刻的对准精度会有1°左右的波动。
3.2 飞行试验验证
将MEMS角速率陀螺搭载于某型号制导炮弹控制舱,对本文提出的粗对准方法进行飞行试验验证,实物图如图13所示。
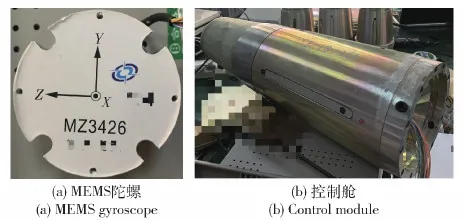
图13 实物图Fig.13 Picture of real products
角速率陀螺输出频率为100 Hz,零偏指标为20°/h,搭载试验未完全标定轴偏角误差,由于所应用的制导炮弹射程在30 km以内,其工作时间较短,误差影响较小,在飞行试验中无需在线校正。在制导炮弹发射后35 s之前处于无控段,35 s开始中制导启控。
该制导炮弹临时装有空间定向陀螺,为此次试验提供滚转基准,其结构如图14(a)所示。定向陀螺在最高点解锁后,弹轴与陀螺轴之间的夹角ϑg逐渐增大,外框架角αo随滚转角产生周期性变化,如图14(b)所示。

图14 空间定向陀螺示意图Fig.14 Schematic diagram of gyroscope for spatial orientation
由图14可知,当且仅当外框架角≥5°时,与外框架角固连的电位计信号将输出5°片信号,其出现的中心时刻则为滚转角为0°。利用空间定向陀螺可得到滚转角,可对本文提出的滚转角对准方法进行误差分析。选取30~34 s内的陀螺测量数据,飞行试验弹载记录仪的角速率陀螺测量数据如图15所示。
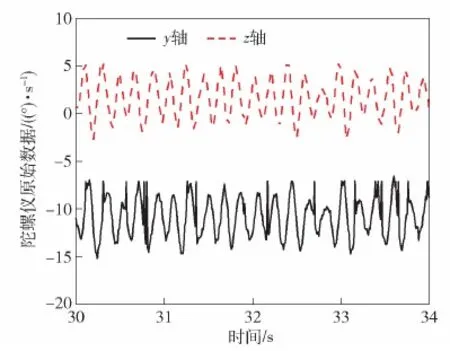
图15 某型号制导炮弹的陀螺仪测量值Fig.15 Gyroscope measurement of a certain type of guided missile
在制导炮弹实际飞行中,陀螺仪测量值总体趋势与仿真结果一致。对陀螺仪测量值进行频谱分析,如图16所示。

图16 飞行试验陀螺仪测量值频谱图Fig.16 Spectrum diagram of gyroscope measurement in flight test
在实际飞行条件下,陀螺仪数据除了存在已知的3种频段外,在全频段存在强度较大的随机噪声,利用带通数字滤波器提取与弹体滚转频率相关的分量。依据带通滤波器通带设计原则,对本文飞行试验设计的带通滤波器进行分析。在30~34 s内,测得滚转频率在5.2~5.4 Hz之间,根据弹体设计的特征频率2 Hz,求得通带为[3.2 Hz,7.4 Hz],该滤波器的特性如图17所示。该滤波器可使滚转频率区间的信息完全通过,低频段分量衰减至-40 dB以下,满足弹道弯曲角速度重构的需求。
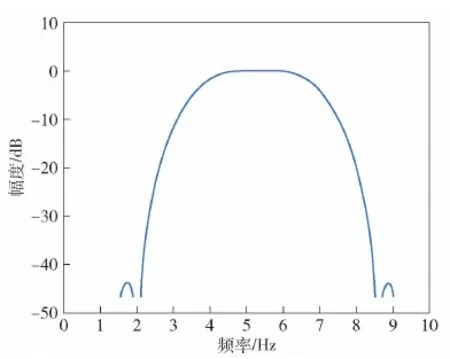
图17 带通滤波器幅频特性Fig.17 Amplitude-frequency characteristics of bandpass filters
验证弹道弯曲角速度重构的效果,结果如图18、图19所示。由式(11)可知,理论弹道弯曲角速度与速度有关,本文利用搭载试验中获取的速度信息计算得到的弹道弯曲角速度作为理论值。

图18 飞行试验频域处理后的陀螺测量值Fig.18 Gyroscope measurement processed in frequency domain in flight test
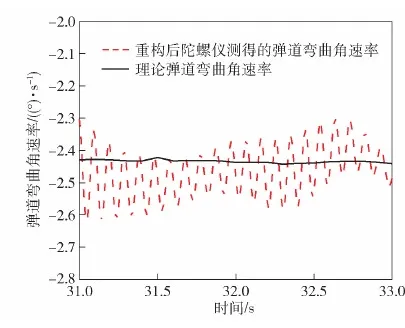
图19 飞行试验弹道弯曲角速度重构效果Fig.19 Reconstruction effect of trajectory bending angular velocity in flight test
经过对陀螺仪测量的原始数据的频域处理,可以在满足一定精度的条件下重构弹道弯曲角速度,由于实际飞行过程中随机噪声较大,精度相比于数学仿真结果稍差。为避开频域处理后陀螺仪数据端点幅值衰减现象,对31~31.8 s的滚转角进行对准分析,每次对准均向后积分1 s。根据飞行试验记录,滚转角为0°的基准信号分别在31.158 s、31.347 s、31.537 s、31.729 s时出现,记录上述4个时刻的对准结果,图20为滚转角空中粗对准结果。图21为该段时间段内滚转角对准误差曲线。

图20 飞行试验中滚转角对准结果Fig.20 Roll Angle alignment results in flight test
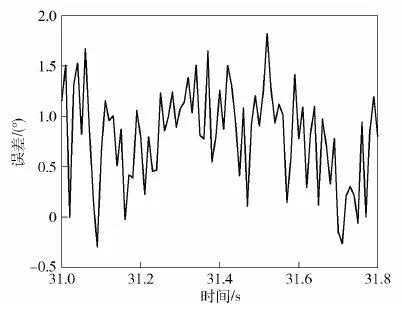
图21 飞行试验中滚转角对准误差Fig.21 Roll Angle alignment error in flight test
从图21中可以看出,对准误差控制在2°以内,由于在飞行搭载试验中陀螺仪测量随机噪声较大,不同时刻的对准精度存在一定波动。飞行搭载试验是存在各种外界干扰及传感器测量误差,在此条件下仍可以保持较理想的滚转角粗对准精度,充分验证了本文提出的空中粗对准方法的有效性。
4 结论
本文针对制导炮弹发射后在空中难以获取滚转角的问题,根据矢量定姿原理,结合制导炮弹姿态运动特有的频域特性,提出一种利用角速率陀螺敏感弹道弯曲角速度矢量的滚转角空中粗对准方法,从而实现制导炮弹在无控段的滚转角快速粗对准,为中制导组合导航精对准提供支撑。得出如下主要结论:
1)采用基于弹道弯曲角速度矢量的滚转角空中粗对准方法,能够在无控段迅速粗对准滚转角,在角速率陀螺存在零偏、白噪声、轴偏角的低精度条件下,粗对准精度保持在1°左右。
2)在制导炮弹复杂的飞行条件下,本文提出的滚转角对准方法精度可达2°以内,对实际工程应用有一定的参考价值。
